Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
MasanoriSuganuma
1,216 views
RAFT: Recurrent All-Pairs Field Transforms for Optical Flow
RAFTのざっくり解説スライド.
Technology
◦
Related topics:
Deep Learning
•
Read more
1
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 16
2
/ 16
3
/ 16
4
/ 16
5
/ 16
Most read
6
/ 16
7
/ 16
Most read
8
/ 16
9
/ 16
Most read
10
/ 16
11
/ 16
12
/ 16
13
/ 16
14
/ 16
15
/ 16
16
/ 16
More Related Content
PPTX
SfM Learner系単眼深度推定手法について
by
Ryutaro Yamauchi
PDF
30th コンピュータビジョン勉強会@関東 DynamicFusion
by
Hiroki Mizuno
PDF
画像認識の初歩、SIFT,SURF特徴量
by
takaya imai
PPTX
Structure from Motion
by
Ryutaro Yamauchi
PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
PDF
20190825 vins mono
by
Takuya Minagawa
PDF
MIRU2013チュートリアル:SIFTとそれ以降のアプローチ
by
Hironobu Fujiyoshi
PPTX
Direct Sparse Odometryの解説
by
Masaya Kaneko
SfM Learner系単眼深度推定手法について
by
Ryutaro Yamauchi
30th コンピュータビジョン勉強会@関東 DynamicFusion
by
Hiroki Mizuno
画像認識の初歩、SIFT,SURF特徴量
by
takaya imai
Structure from Motion
by
Ryutaro Yamauchi
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
20190825 vins mono
by
Takuya Minagawa
MIRU2013チュートリアル:SIFTとそれ以降のアプローチ
by
Hironobu Fujiyoshi
Direct Sparse Odometryの解説
by
Masaya Kaneko
What's hot
PDF
画像生成・生成モデル メタサーベイ
by
cvpaper. challenge
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PPTX
【DL輪読会】DiffRF: Rendering-guided 3D Radiance Field Diffusion [N. Muller+ CVPR2...
by
Deep Learning JP
PDF
全力解説!Transformer
by
Arithmer Inc.
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PDF
【メタサーベイ】Transformerから基盤モデルまでの流れ / From Transformer to Foundation Models
by
cvpaper. challenge
PPTX
ResNetの仕組み
by
Kota Nagasato
PDF
GAN(と強化学習との関係)
by
Masahiro Suzuki
PDF
【DL輪読会】NeRF-VAE: A Geometry Aware 3D Scene Generative Model
by
Deep Learning JP
PDF
Point net
by
Fujimoto Keisuke
PPTX
Triplet Loss 徹底解説
by
tancoro
PDF
Rでisomap(多様体学習のはなし)
by
Kohta Ishikawa
PDF
【メタサーベイ】Neural Fields
by
cvpaper. challenge
PDF
Transformerを多層にする際の勾配消失問題と解決法について
by
Sho Takase
PPTX
[DL輪読会]ドメイン転移と不変表現に関するサーベイ
by
Deep Learning JP
PPTX
物体検出の歴史(R-CNNからSSD・YOLOまで)
by
HironoriKanazawa
PDF
Cvpr 2021 manydepth
by
Kenta Tanaka
PDF
SLAM開発における課題と対策の一例の紹介
by
miyanegi
PPTX
[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
by
Kento Doi
PDF
【DL輪読会】Perceiver io a general architecture for structured inputs & outputs
by
Deep Learning JP
画像生成・生成モデル メタサーベイ
by
cvpaper. challenge
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
【DL輪読会】DiffRF: Rendering-guided 3D Radiance Field Diffusion [N. Muller+ CVPR2...
by
Deep Learning JP
全力解説!Transformer
by
Arithmer Inc.
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
【メタサーベイ】Transformerから基盤モデルまでの流れ / From Transformer to Foundation Models
by
cvpaper. challenge
ResNetの仕組み
by
Kota Nagasato
GAN(と強化学習との関係)
by
Masahiro Suzuki
【DL輪読会】NeRF-VAE: A Geometry Aware 3D Scene Generative Model
by
Deep Learning JP
Point net
by
Fujimoto Keisuke
Triplet Loss 徹底解説
by
tancoro
Rでisomap(多様体学習のはなし)
by
Kohta Ishikawa
【メタサーベイ】Neural Fields
by
cvpaper. challenge
Transformerを多層にする際の勾配消失問題と解決法について
by
Sho Takase
[DL輪読会]ドメイン転移と不変表現に関するサーベイ
by
Deep Learning JP
物体検出の歴史(R-CNNからSSD・YOLOまで)
by
HironoriKanazawa
Cvpr 2021 manydepth
by
Kenta Tanaka
SLAM開発における課題と対策の一例の紹介
by
miyanegi
[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
by
Kento Doi
【DL輪読会】Perceiver io a general architecture for structured inputs & outputs
by
Deep Learning JP
Similar to RAFT: Recurrent All-Pairs Field Transforms for Optical Flow
PDF
文献紹介:Learning Video Stabilization Using Optical Flow
by
Toru Tamaki
PDF
【DLゼミ】XFeat: Accelerated Features for Lightweight Image Matching
by
harmonylab
PDF
大規模画像認識とその周辺
by
n_hidekey
PDF
ICCV2011 report
by
Hironobu Fujiyoshi
PDF
20140726 関東cv勉強会
by
M Kimura
PPTX
Online moving camera_background_subtraction
by
Daichi Suzuo
PDF
Opencv object detection_takmin
by
Takuya Minagawa
PPTX
【DL輪読会】Flow Matching for Generative Modeling
by
Deep Learning JP
PDF
画像認識における幾何学的不変性の扱い
by
Seiji Hotta
PDF
関西CVPRML勉強会(特定物体認識) 2012.1.14
by
Akisato Kimura
PDF
20110904cvsaisentan(shirasy) 3 4_3
by
Yoichi Shirasawa
PDF
静岡Developers勉強会コンピュータビジョンvol2
by
niku9Tenhou
PPTX
Image net classification with Deep Convolutional Neural Networks
by
Shingo Horiuchi
PDF
20130925.deeplearning
by
Hayaru SHOUNO
PDF
論文紹介:DF-Net: Unsupervised Joint Learning of Depth and Flow using Cross-Networ...
by
matsunoh
PPTX
RAPiD
by
harmonylab
PPTX
Image Retrieval Overview (from Traditional Local Features to Recent Deep Lear...
by
Yusuke Uchida
PDF
水平線検出による船体動揺映像の安定化論文
by
doboncho
PDF
関西CVPRML勉強会 2011.9.23
by
Akisato Kimura
PDF
コンピュータビジョンで作る未来の栽培技術POL共催セミナー_20220527
by
ssuser5ec200
文献紹介:Learning Video Stabilization Using Optical Flow
by
Toru Tamaki
【DLゼミ】XFeat: Accelerated Features for Lightweight Image Matching
by
harmonylab
大規模画像認識とその周辺
by
n_hidekey
ICCV2011 report
by
Hironobu Fujiyoshi
20140726 関東cv勉強会
by
M Kimura
Online moving camera_background_subtraction
by
Daichi Suzuo
Opencv object detection_takmin
by
Takuya Minagawa
【DL輪読会】Flow Matching for Generative Modeling
by
Deep Learning JP
画像認識における幾何学的不変性の扱い
by
Seiji Hotta
関西CVPRML勉強会(特定物体認識) 2012.1.14
by
Akisato Kimura
20110904cvsaisentan(shirasy) 3 4_3
by
Yoichi Shirasawa
静岡Developers勉強会コンピュータビジョンvol2
by
niku9Tenhou
Image net classification with Deep Convolutional Neural Networks
by
Shingo Horiuchi
20130925.deeplearning
by
Hayaru SHOUNO
論文紹介:DF-Net: Unsupervised Joint Learning of Depth and Flow using Cross-Networ...
by
matsunoh
RAPiD
by
harmonylab
Image Retrieval Overview (from Traditional Local Features to Recent Deep Lear...
by
Yusuke Uchida
水平線検出による船体動揺映像の安定化論文
by
doboncho
関西CVPRML勉強会 2011.9.23
by
Akisato Kimura
コンピュータビジョンで作る未来の栽培技術POL共催セミナー_20220527
by
ssuser5ec200
More from MasanoriSuganuma
PDF
0から理解するニューラルネットアーキテクチャサーチ(NAS)
by
MasanoriSuganuma
PDF
高1から始める人工知能(AI)
by
MasanoriSuganuma
PDF
When NAS Meets Robustness: In Search of Robust Architectures against Adversar...
by
MasanoriSuganuma
PDF
When NAS Meets Robustness: In Search of Robust Architectures against Adversar...
by
MasanoriSuganuma
PDF
Attention-Based Adaptive Selection of Operations for Image Restoration in the...
by
MasanoriSuganuma
PPTX
CNNの構造最適化手法について
by
MasanoriSuganuma
PPTX
CNNの構造最適化手法(第3回3D勉強会)
by
MasanoriSuganuma
0から理解するニューラルネットアーキテクチャサーチ(NAS)
by
MasanoriSuganuma
高1から始める人工知能(AI)
by
MasanoriSuganuma
When NAS Meets Robustness: In Search of Robust Architectures against Adversar...
by
MasanoriSuganuma
When NAS Meets Robustness: In Search of Robust Architectures against Adversar...
by
MasanoriSuganuma
Attention-Based Adaptive Selection of Operations for Image Restoration in the...
by
MasanoriSuganuma
CNNの構造最適化手法について
by
MasanoriSuganuma
CNNの構造最適化手法(第3回3D勉強会)
by
MasanoriSuganuma
Recently uploaded
PDF
visionOS TC「新しいマイホームで過ごすApple Vision Proとの新生活」
by
Sugiyama Yugo
PPTX
DrupalCon Nara 2025の記録 .
by
iPride Co., Ltd.
PDF
基礎から学ぶ PostgreSQL の性能監視 (PostgreSQL Conference Japan 2025 発表資料)
by
NTT DATA Technology & Innovation
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):東京大学情報基盤センター テーマ1/2/3「Society5.0の実現を目指す『計算・データ・学習...
by
PC Cluster Consortium
PDF
安価な ロジック・アナライザを アナライズ(?),Analyze report of some cheap logic analyzers
by
たけおか しょうぞう
PDF
第25回FA設備技術勉強会_自宅で勉強するROS・フィジカルAIアイテム.pdf
by
TomohiroKusu
visionOS TC「新しいマイホームで過ごすApple Vision Proとの新生活」
by
Sugiyama Yugo
DrupalCon Nara 2025の記録 .
by
iPride Co., Ltd.
基礎から学ぶ PostgreSQL の性能監視 (PostgreSQL Conference Japan 2025 発表資料)
by
NTT DATA Technology & Innovation
PCCC25(設立25年記念PCクラスタシンポジウム):東京大学情報基盤センター テーマ1/2/3「Society5.0の実現を目指す『計算・データ・学習...
by
PC Cluster Consortium
安価な ロジック・アナライザを アナライズ(?),Analyze report of some cheap logic analyzers
by
たけおか しょうぞう
第25回FA設備技術勉強会_自宅で勉強するROS・フィジカルAIアイテム.pdf
by
TomohiroKusu
RAFT: Recurrent All-Pairs Field Transforms for Optical Flow
1.
RAFT: Recurrent All-Pairs
Field Transforms for Optical Flow Zachary Teed and Jia Deng Princeton University wkpeco
2.
RAFT: Recurrent All-Pairs
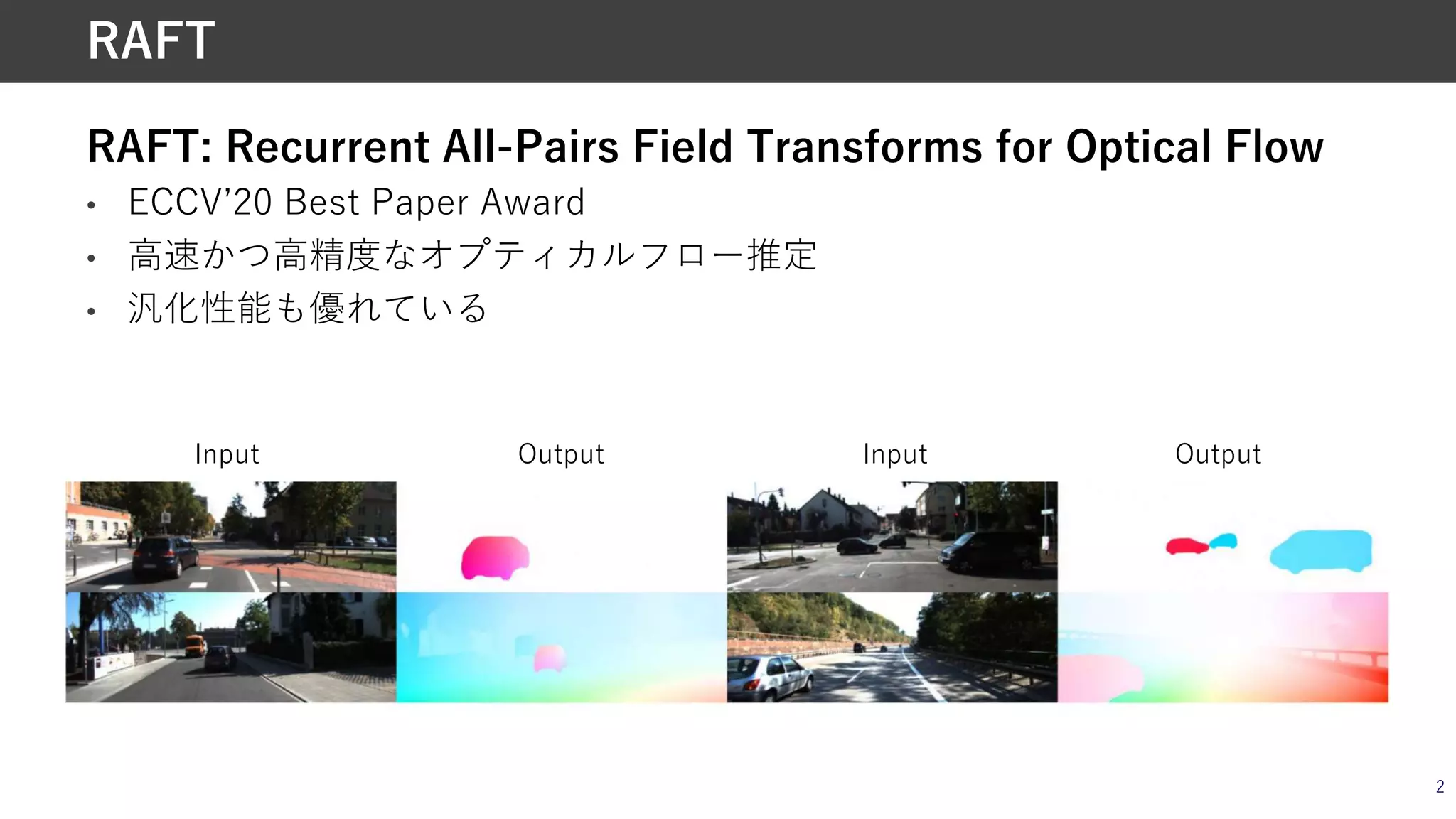
Field Transforms for Optical Flow • ECCVʼ20 Best Paper Award • ⾼速かつ⾼精度なオプティカルフロー推定 • 汎化性能も優れている 2 RAFT Input InputOutput Output
3.
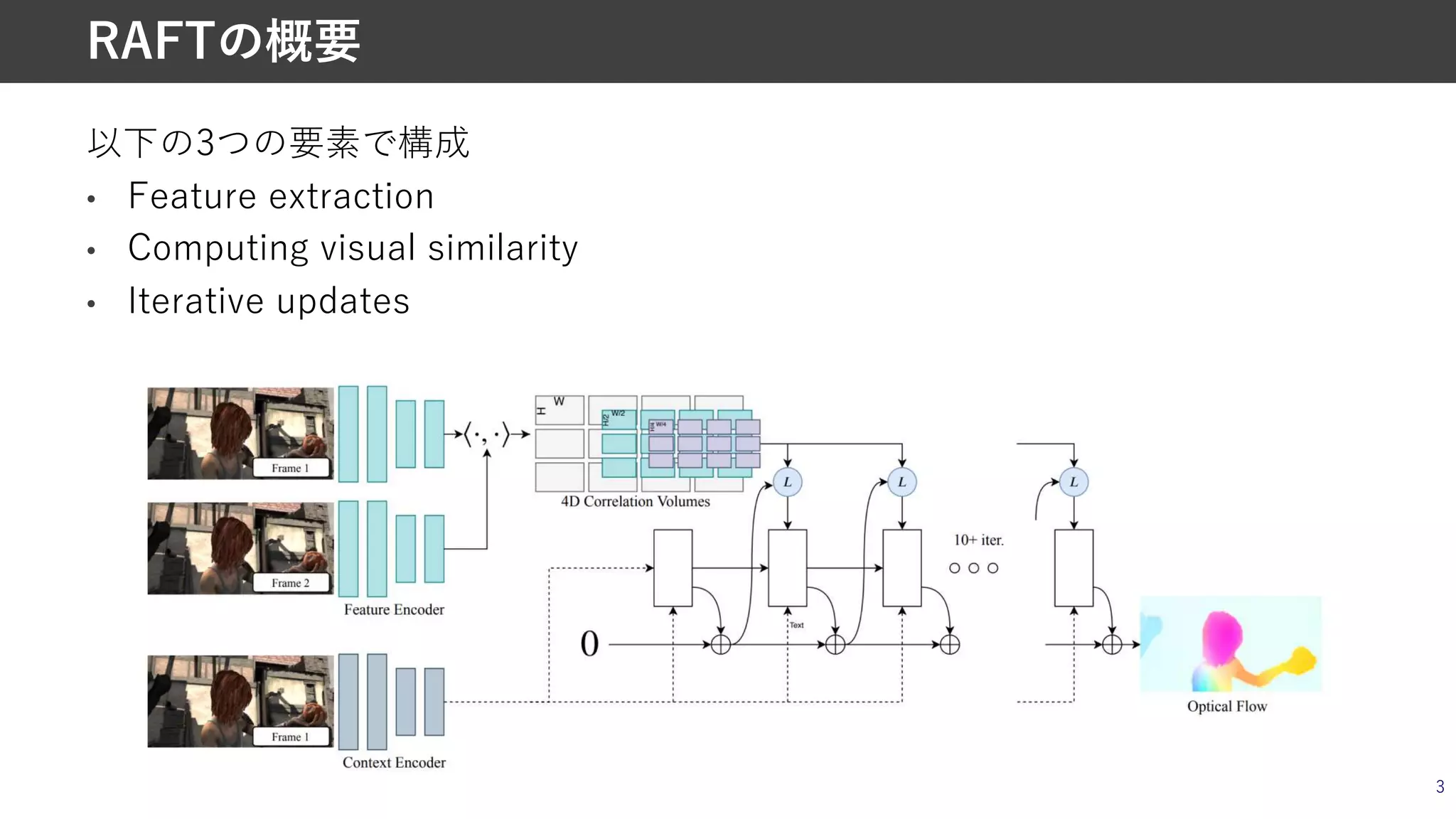
以下の3つの要素で構成 • Feature extraction •
Computing visual similarity • Iterative updates 3 RAFTの概要
4.
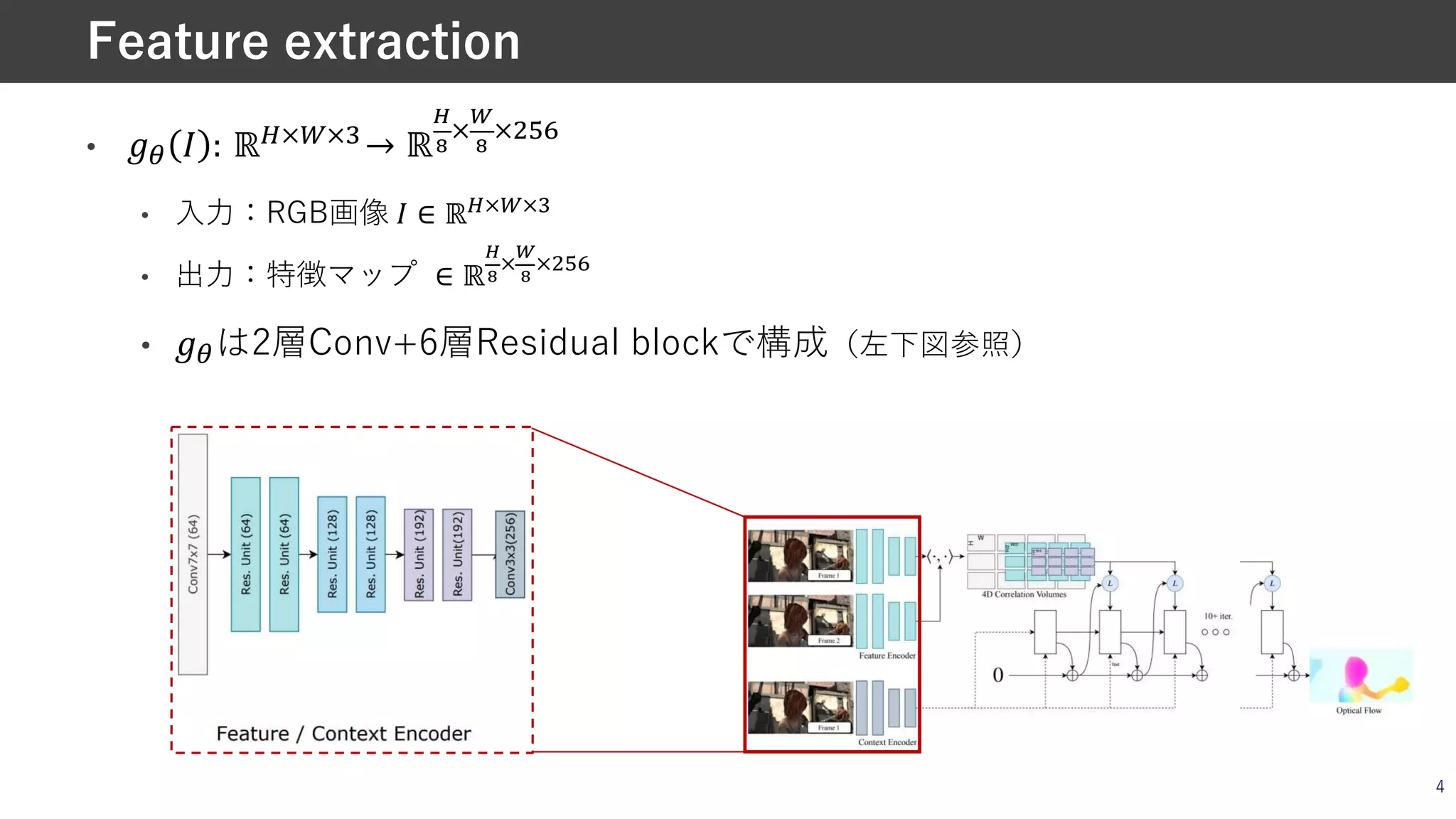
• !" #
: ℝ&×(×)→ ℝ + , × - , ×./0 • ⼊⼒:RGB画像 # ∈ ℝ&×(×) • 出⼒:特徴マップ ∈ ℝ + , × - , ×./0 • !"は2層Conv+6層Residual blockで構成(左下図参照) 4 Feature extraction
5.
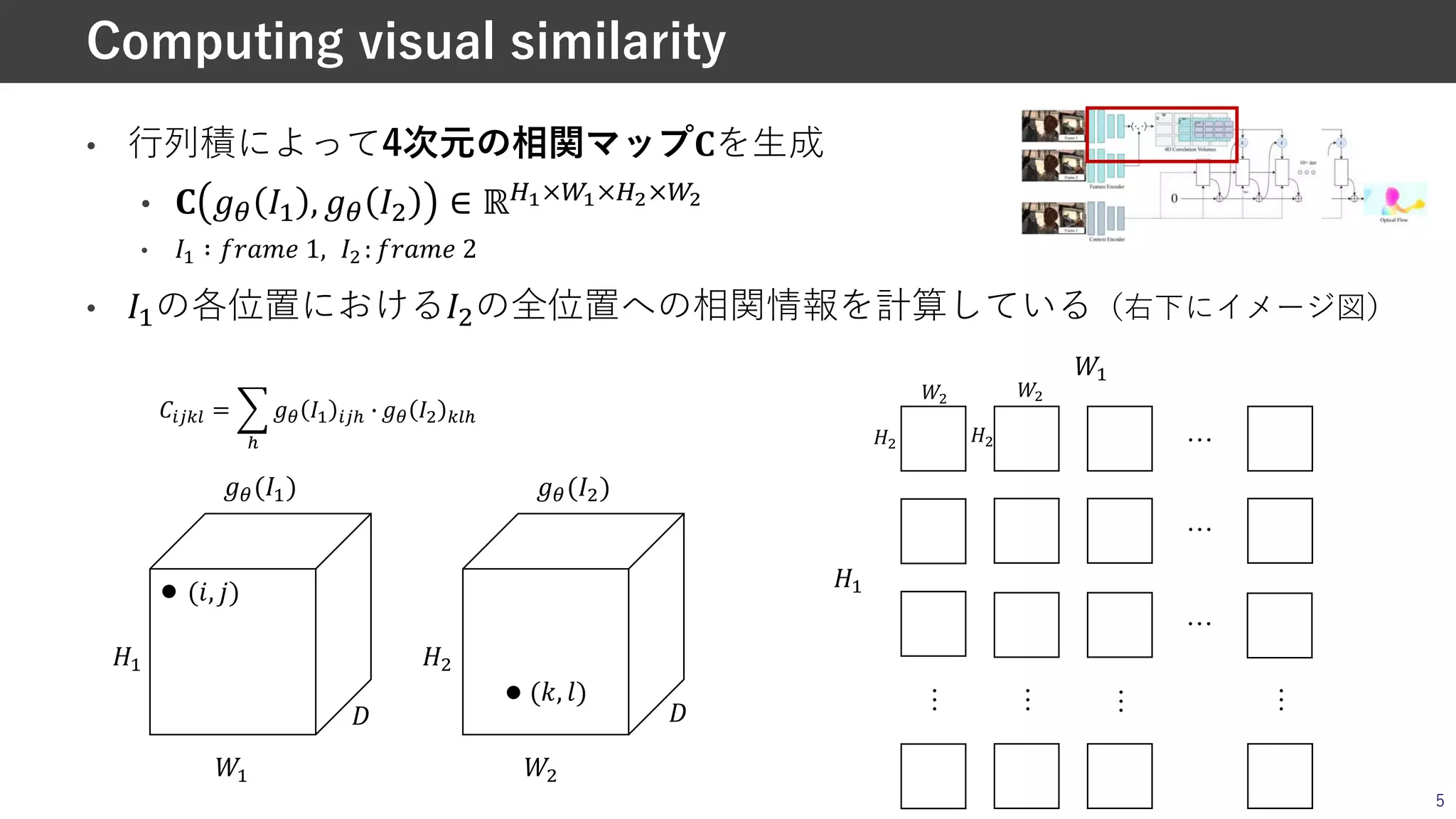
• ⾏列積によって4次元の相関マップ!を⽣成 • !
"# $% , "# $' ∈ ℝ*+×-+×*.×-. • $% ∶ 01234 1, $' : 01234 2 • $%の各位置における$'の全位置への相関情報を計算している(右下にイメージ図) 5 Computing visual similarity 8% 9% 9' 8' (;, <) (>, ?) @@ "#($%) "#($') … … … … … … … 8' 9' 8% 9% 8' 9' ABCDE = G H "# $% BCH I "# $' DEH
6.
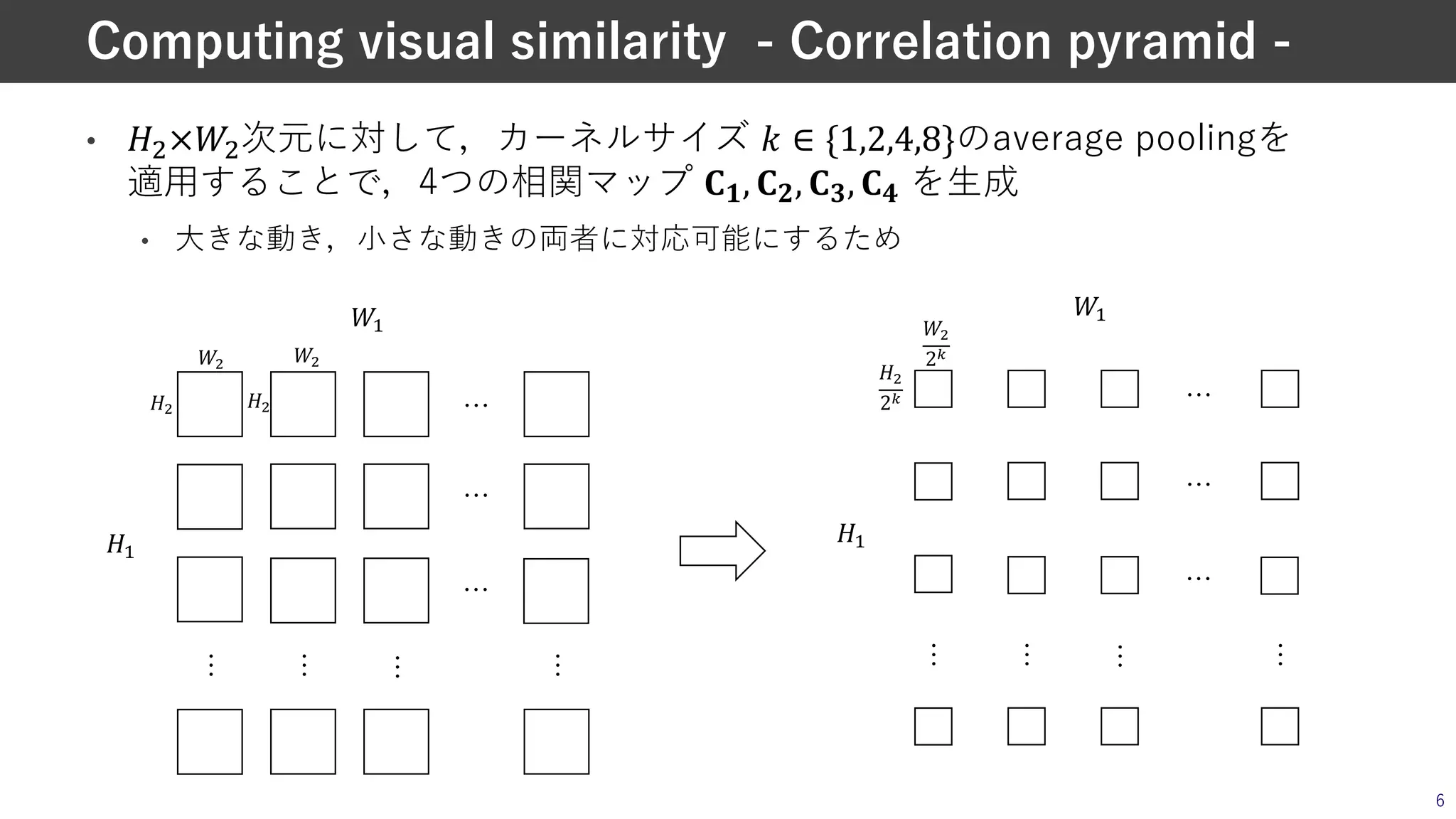
• !"×$"次元に対して,カーネルサイズ %
∈ {1,2,4,8}のaverage poolingを 適⽤することで,4つの相関マップ ./, .0, .1, .2 を⽣成 • ⼤きな動き,⼩さな動きの両者に対応可能にするため 6 Computing visual similarity - Correlation pyramid - … … … … … … … !" $" !3 $3 !" $" … … … … … … … !" 24 $" 24 !3 $3
7.
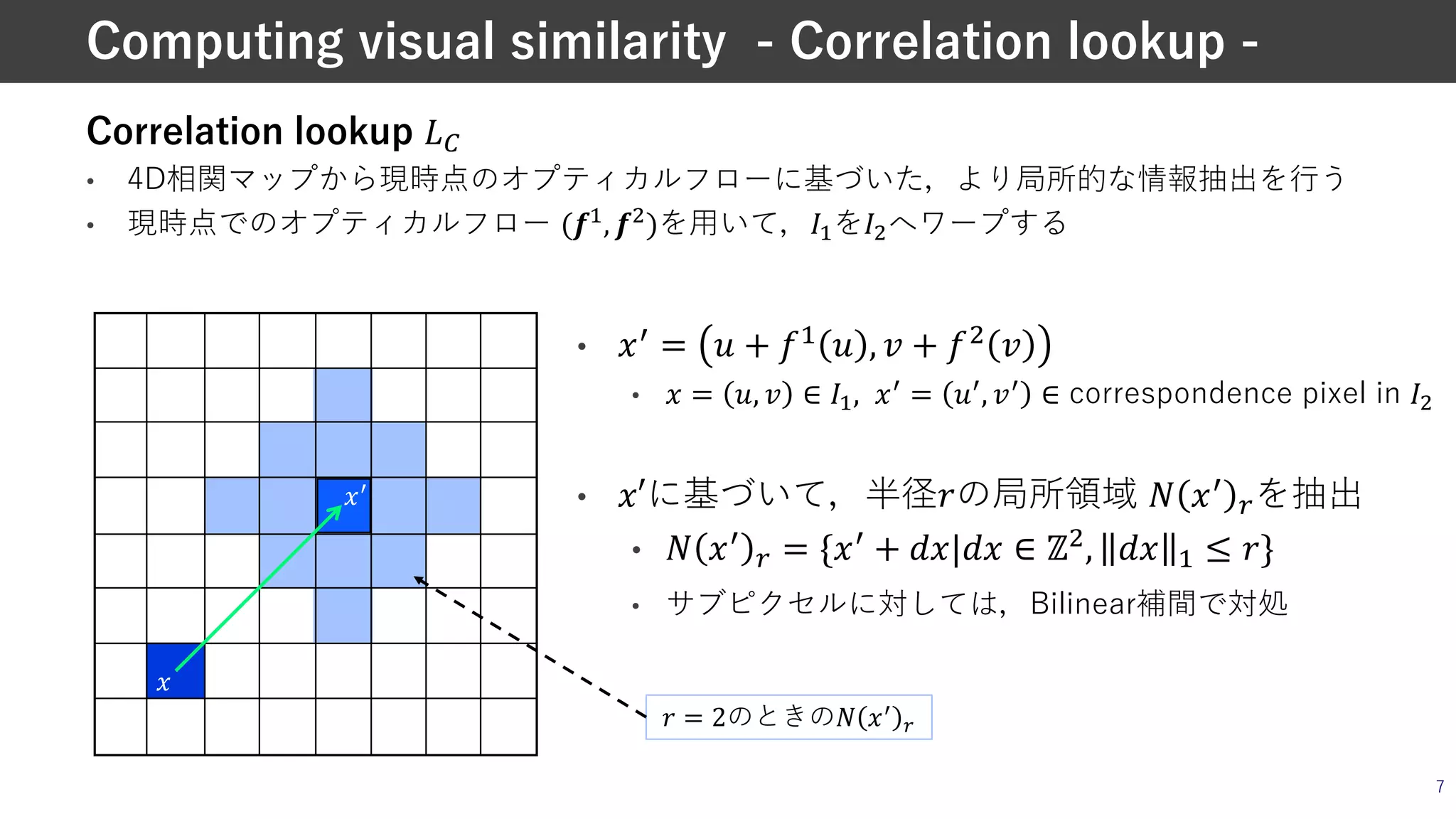
Correlation lookup !" •
4D相関マップから現時点のオプティカルフローに基づいた,より局所的な情報抽出を⾏う • 現時点でのオプティカルフロー ($%, $')を⽤いて,)%を)'へワープする 7 Computing visual similarity - Correlation lookup - *+ * • *+ = - + /% - , 0 + /' 0 • * = -, 0 ∈ )%, *+ = -+, 0+ ∈ correspondence pixel in )' • *′に基づいて,半径3の局所領域 4 *+ 5を抽出 • 4 *+ 5 = {*+ + 7*|7* ∈ ℤ', 7* % ≤ 3} • サブピクセルに対しては,Bilinear補間で対処 3 = 2のときの4 *+ 5
8.
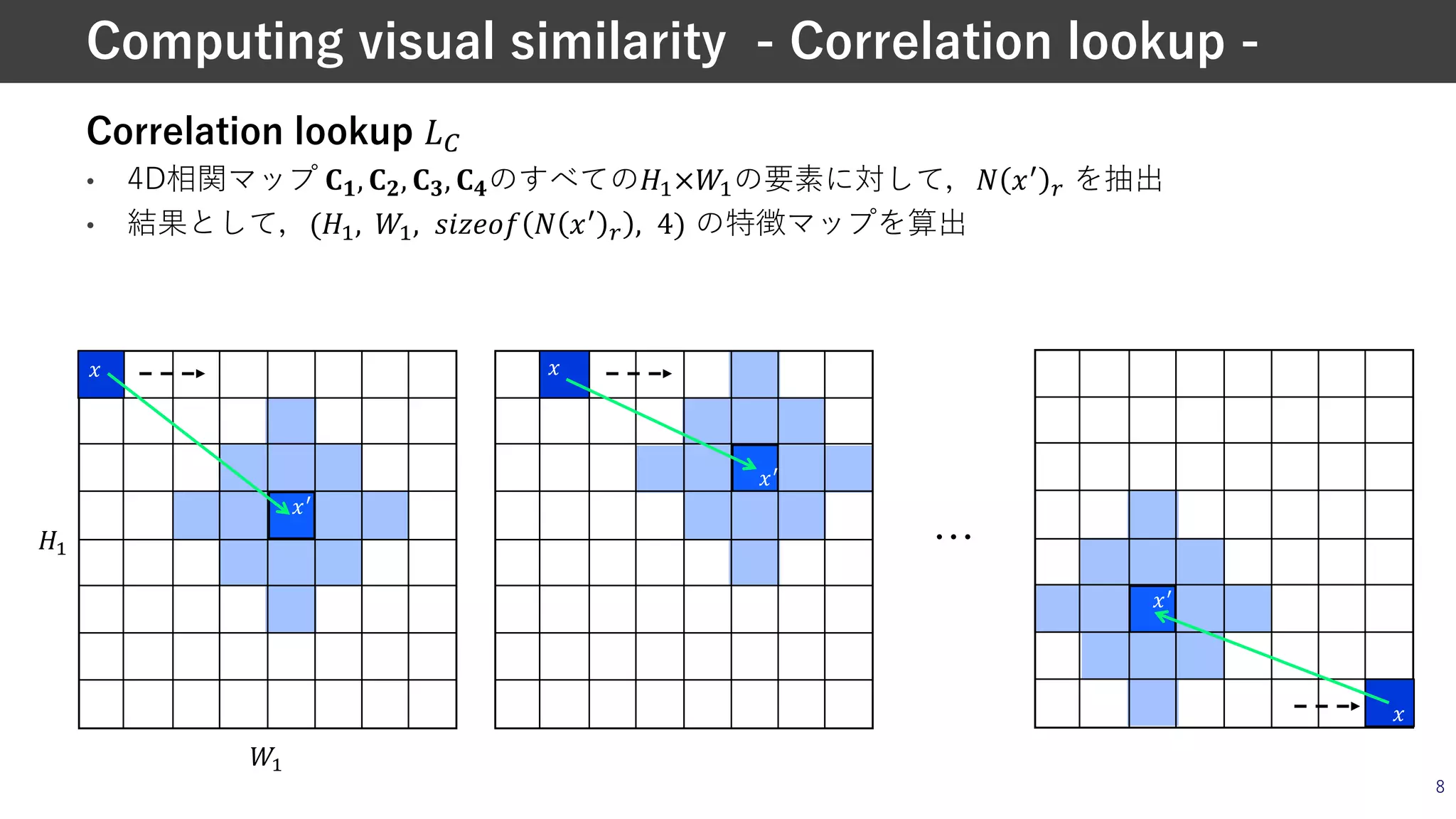
Correlation lookup !" •
4D相関マップ #$, #&, #', #(のすべての)*×,*の要素に対して,- ./ 0 を抽出 • 結果として,()*, ,*, 234567 - ./ 0 , 4) の特徴マップを算出 8 Computing visual similarity - Correlation lookup - Correlation lookup !" • 4D相関マップのすべての#$×&'の要素に対して,( )* + を抽出 11 Computing visual similarity - Correlation lookup - )* ) )* ) )* ) Correlation lookup !" • 4D相関マップのすべての#$×&'の要素に対して,( )* + を抽出 11 Computing visual similarity - Correlation lookup - )* ) )* ) )* ) …)* ,*
9.
• Correlation lookupとUpdate
operatorを⽤いて, オプティカルフローを逐次的に更新していく • !" → !$ → ⋯ → !& (!" = )) • Update operator • GRU+Conv • ⼊⼒:フロー!+, context encoderの出⼒ ,-., Correlation map /(0′)2 • 出⼒:Δ! (!+4$ = Δ! + !+ でフローを更新していく) 9 Iterative updates Δ! = Conv:×:(Conv$×$ ℎ+ ) 0+: Concat[>+, ,-., / 0@ 2] Update operatorの中⾝
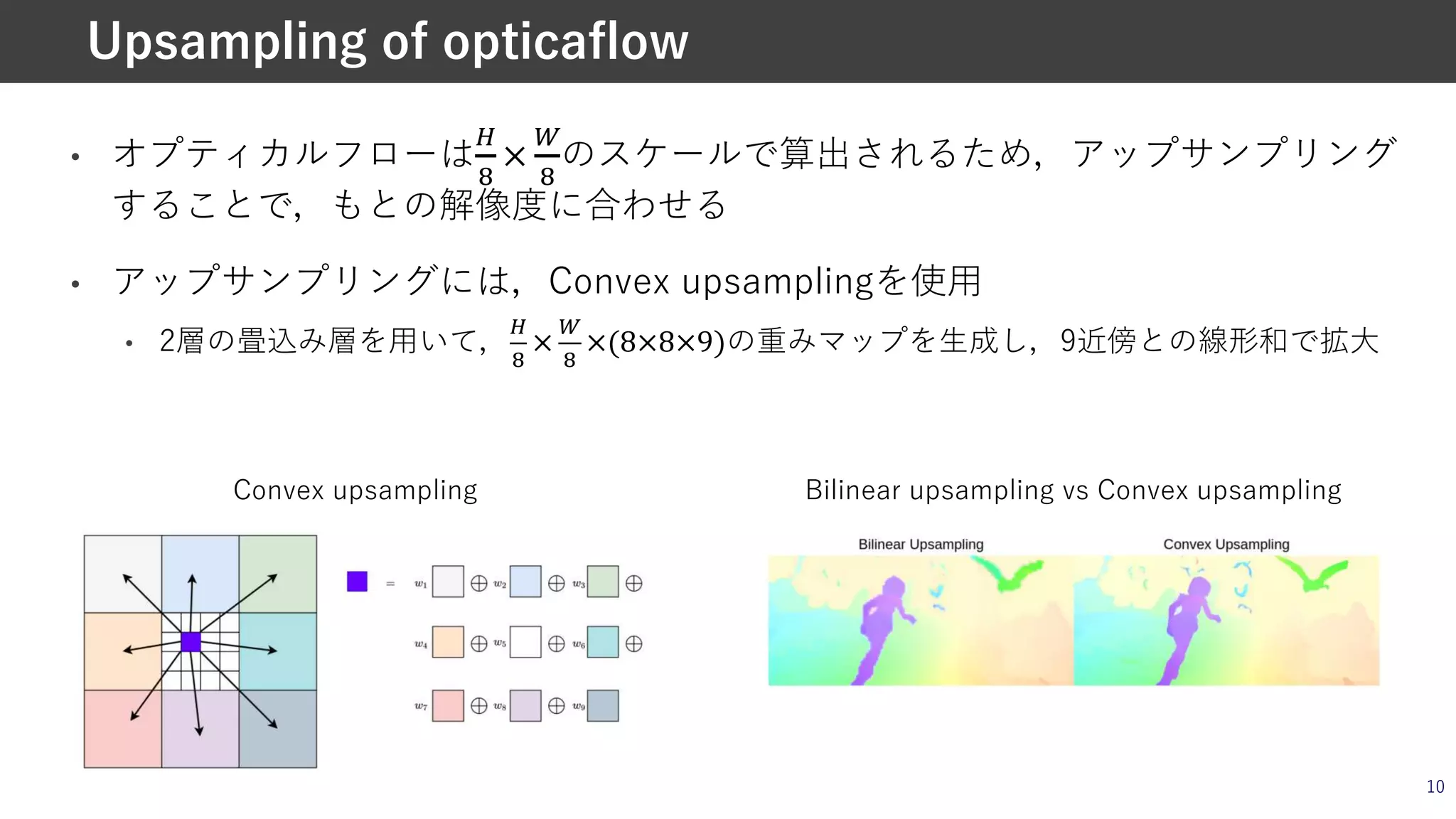
10.
• オプティカルフローは ! " × $ " のスケールで算出されるため,アップサンプリング することで,もとの解像度に合わせる • アップサンプリングには,Convex
upsamplingを使⽤ • 2層の畳込み層を⽤いて, ! " × $ " ×(8×8×9)の重みマップを⽣成し,9近傍との線形和で拡⼤ 10 Upsampling of opticaflow Convex upsampling Bilinear upsampling vs Convex upsampling
11.
損失関数:Ground truthと各ステップでの推定フロー間のL1距離 • ℒ
= ∑$%& ' (')& *+$ − *$ & ( = 0.8, 1 = 32 Implementation details • Optimizer: AdamW [1] • Two 2080Ti GPUs 11 学習⽅法 [1] Loshchilov, I., Hutter, F.: Decoupled weight decay regularization. arXiv:1711.05101, 2017 Dataset for training C: FlyingChairs, T: FlyingThings, S: Sintel, K: KITTI, H: HD1K
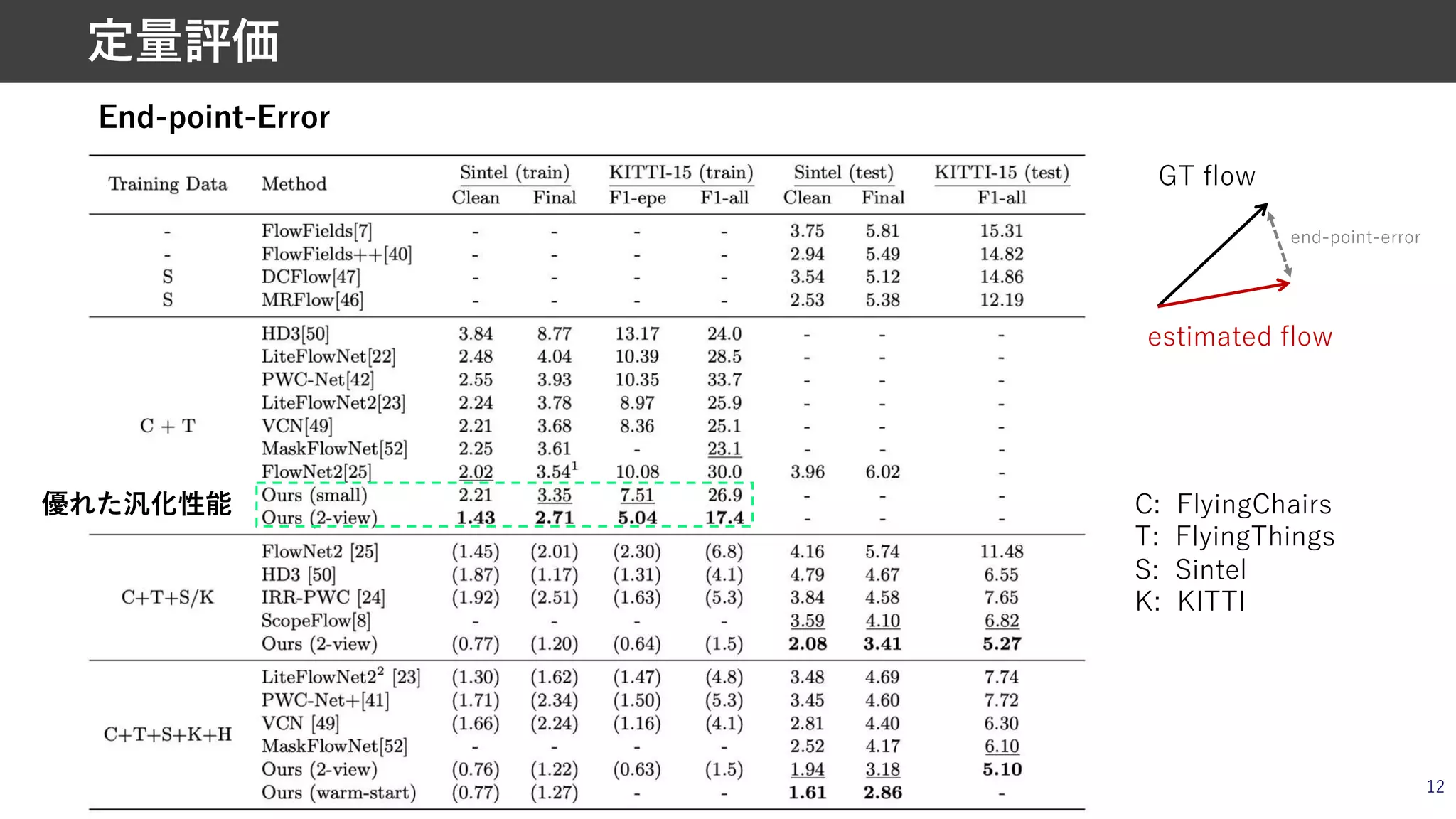
12.
12 定量評価 estimated flow GT flow End-point-Error end-point-error C:
FlyingChairs T: FlyingThings S: Sintel K: KITTI 優れた汎化性能
13.
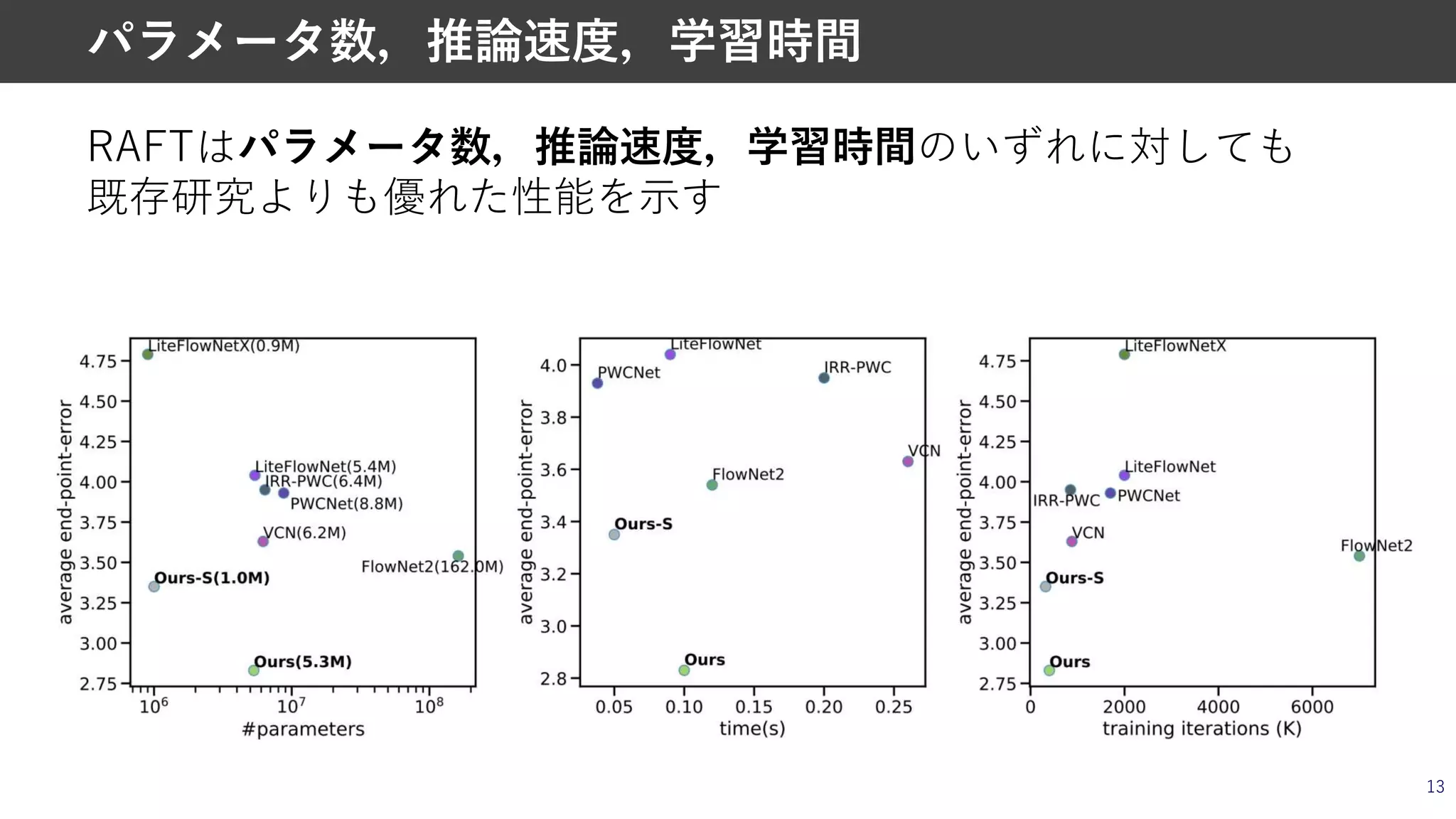
RAFTはパラメータ数,推論速度,学習時間のいずれに対しても 既存研究よりも優れた性能を⽰す 13 パラメータ数,推論速度,学習時間
14.
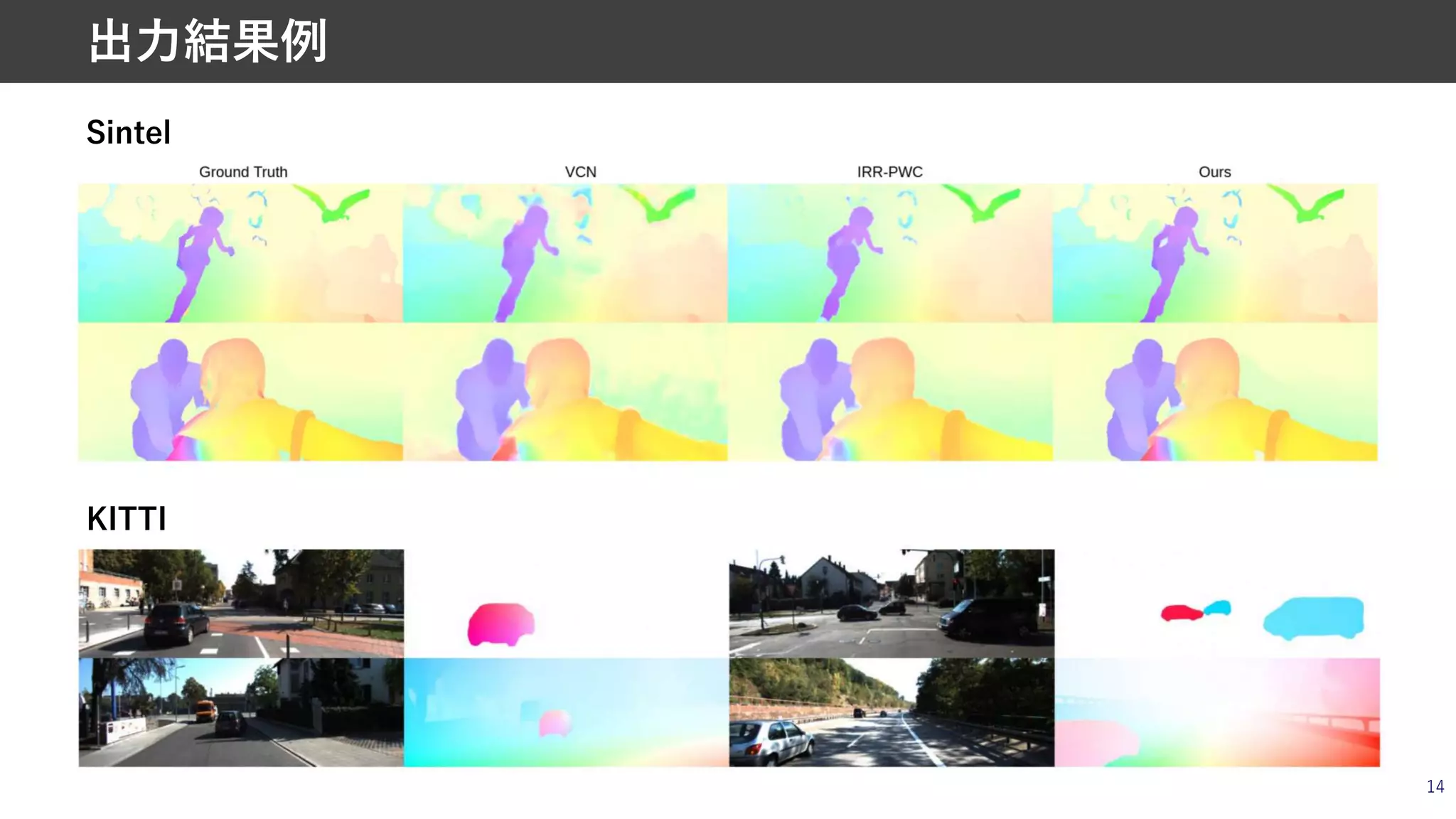
14 出⼒結果例 Sintel KITTI
15.
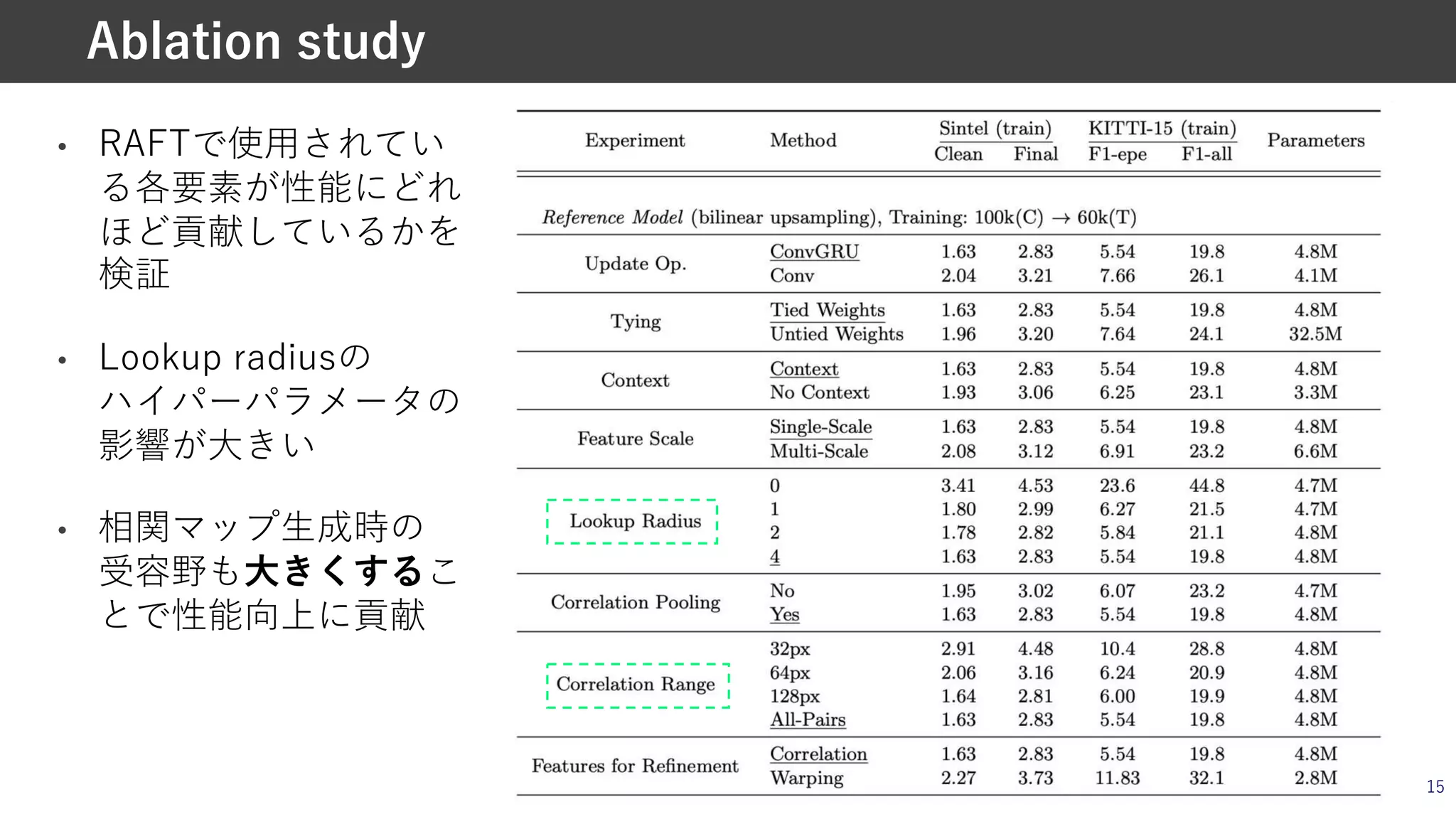
• RAFTで使⽤されてい る各要素が性能にどれ ほど貢献しているかを 検証 • Lookup
radiusの ハイパーパラメータの 影響が⼤きい • 相関マップ⽣成時の 受容野も⼤きくするこ とで性能向上に貢献 15 Ablation study
16.
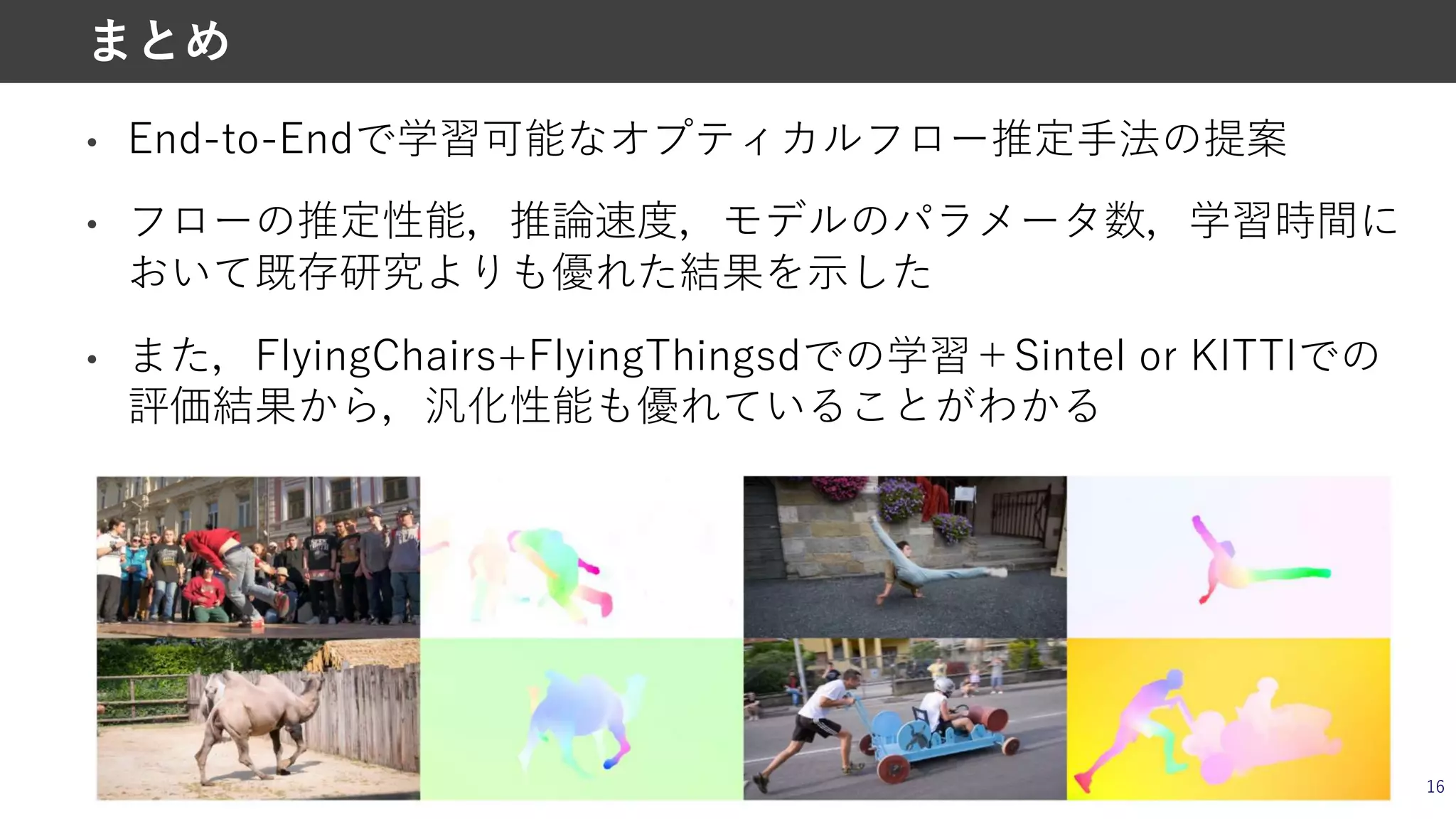
• End-to-Endで学習可能なオプティカルフロー推定⼿法の提案 • フローの推定性能,推論速度,モデルのパラメータ数,学習時間に おいて既存研究よりも優れた結果を⽰した •
また,FlyingChairs+FlyingThingsdでの学習+Sintel or KITTIでの 評価結果から,汎化性能も優れていることがわかる 16 まとめ
Download
![• Correlation lookupとUpdate operatorを⽤いて,
オプティカルフローを逐次的に更新していく
• !" → !$ → ⋯ → !& (!" = ))
• Update operator
• GRU+Conv
• ⼊⼒:フロー!+, context encoderの出⼒ ,-., Correlation map /(0′)2
• 出⼒:Δ! (!+4$ = Δ! + !+ でフローを更新していく)
9
Iterative updates
Δ! = Conv:×:(Conv$×$ ℎ+ )
0+: Concat[>+, ,-., / 0@
2]
Update operatorの中⾝](https://image.slidesharecdn.com/raft-201203101130/75/RAFT-Recurrent-All-Pairs-Field-Transforms-for-Optical-Flow-9-2048.jpg)
![損失関数:Ground truthと各ステップでの推定フロー間のL1距離
• ℒ = ∑$%&
'
(')&
*+$ − *$ &
( = 0.8, 1 = 32
Implementation details
• Optimizer: AdamW [1]
• Two 2080Ti GPUs
11
学習⽅法
[1] Loshchilov, I., Hutter, F.: Decoupled weight decay regularization. arXiv:1711.05101, 2017
Dataset for training C: FlyingChairs, T: FlyingThings, S: Sintel, K: KITTI, H: HD1K](https://image.slidesharecdn.com/raft-201203101130/75/RAFT-Recurrent-All-Pairs-Field-Transforms-for-Optical-Flow-11-2048.jpg)






















![[DL輪読会]ドメイン転移と不変表現に関するサーベイ](https://cdn.slidesharecdn.com/ss_thumbnails/20190614iwasawa-190614005939-thumbnail.jpg?width=640&height=640&fit=bounds)



![[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerf20200327slideshare-200326131430-thumbnail.jpg?width=640&height=640&fit=bounds)

































