More Related Content

PPTX

PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~ 
PPTX

PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~ 
PDF
![[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerf20200327slideshare-200326131430-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis 
PDF
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向 
PPTX
What's hot

PPTX

PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東) ![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~ 
PDF
SLAMチュートリアル大会資料(ORB-SLAM) 
PPTX

PPTX

PPTX
【DL輪読会】DreamBooth: Fine Tuning Text-to-Image Diffusion Models for Subject-Dri... ![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis 
PDF

PDF

PDF
![[DL輪読会]Depth Prediction Without the Sensors: Leveraging Structure for Unsuper...](https://cdn.slidesharecdn.com/ss_thumbnails/struct2depth0301-190304050917-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[DL輪読会]Depth Prediction Without the Sensors: Leveraging Structure for Unsuper... 
PDF

PDF
20190307 visualslam summary 
PDF

PDF

PDF
30th コンピュータビジョン勉強会@関東 DynamicFusion 
PDF

PDF
ICCV19読み会 "Learning Single Camera Depth Estimation using Dual-Pixels" 
PDF
人工知能技術を用いた各医学画像処理の基礎 (2022/09/09) Viewers also liked

PDF
MIRU2013チュートリアル:SIFTとそれ以降のアプローチ 
PDF

PDF

PDF

PPTX
20150328 cv関東勉強会 sumisumithパート_v1.3 
PDF
T TIME 滞在時間割キャンペーン(第4回販促会議企画コンペティション) 
PDF

PPTX
DjangoでさくっとWeb アプリケーション開発をする話 
PPTX
第28回コンピュータビジョン勉強会@関東(kanejaki担当分) 
PPTX
Cvim saisentan-5-2-tomoaki 
PDF
cvsaisentan5 Multi View Stereo 3.3 
PDF
2008-12-07_PTAM_Kansai.AR Similar to 関東コンピュータビジョン勉強会

PPTX
Direct Sparse Odometryの解説 
PDF
BA-Net: Dense Bundle Adjustment Network (3D勉強会@関東) 
PDF
SSII2018TS: 3D物体検出とロボットビジョンへの応用 
PDF
論文紹介「PointNetLK: Robust & Efficient Point Cloud Registration Using PointNet」 
PDF
3次元レジストレーション(PCLデモとコード付き) 
PPTX
SSII2020TS: 物理ベースビジョンの過去・現在・未来 〜 カメラ・物体・光のインタラクションを モデル化するには 〜 
PPTX

PDF
![SSII2020 [O3-01] Extreme 3D センシング](https://cdn.slidesharecdn.com/ss_thumbnails/200612-ssii-extreme3dsensing-print3-200608114658-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
SSII2020 [O3-01] Extreme 3D センシング 
PDF
ICCV2019読み会「Learning Meshes for Dense Visual SLAM」 
PPTX
Kantocv 2-1-calibration publish 
PPTX
論文解説:スマホカメラを用いたBRDFパラメータ取得技術(非DNN)「Two-Shot SVBRDF Capture for Stationary Mat... 
PDF
静岡Developers勉強会コンピュータビジョンvol4発表用資料 
PDF
Inside-Outカメラからの3次元Scan Pathとシーン構造の復元 
PPTX
20161203 cv 3_d_recon_tracking_eventcamera 
PDF
「SSII2025 奥行き白線画像群のCNN回帰による焦点距離の自動キャリブレーション」論文 
PDF

PPT
Light weightbinocular sigasia2012_face 
PDF

PDF
関東コンピュータビジョン勉強会
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
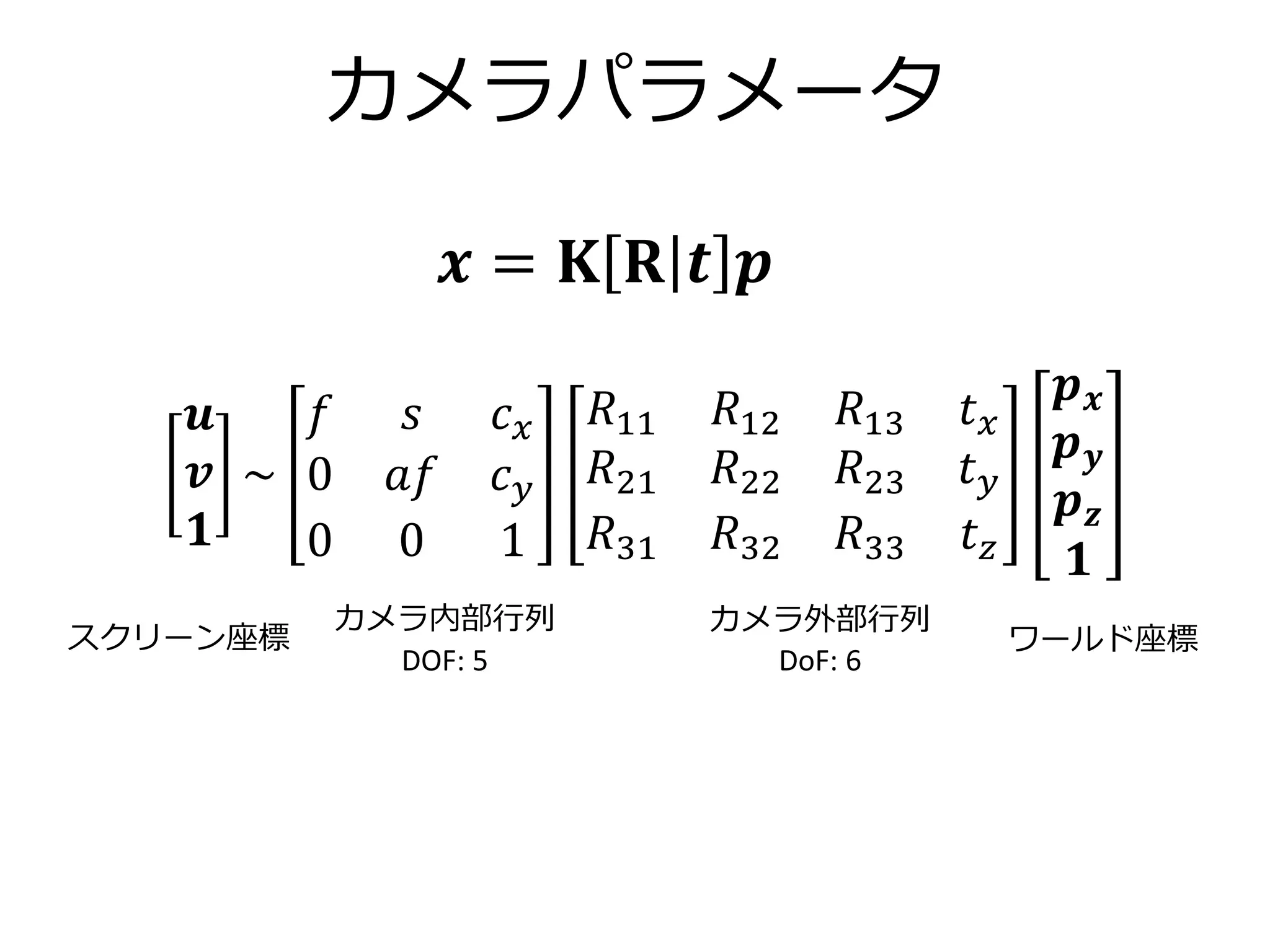
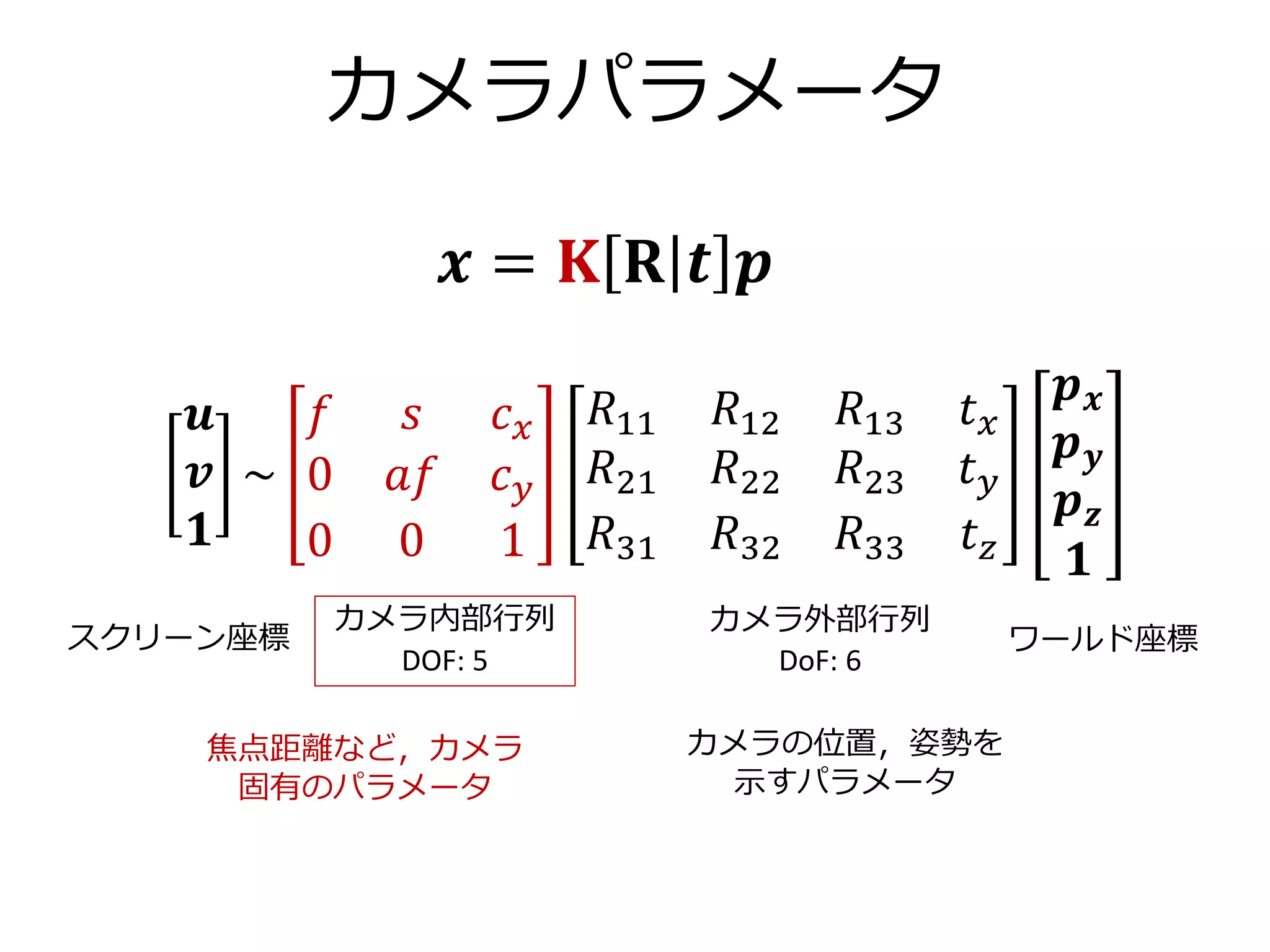
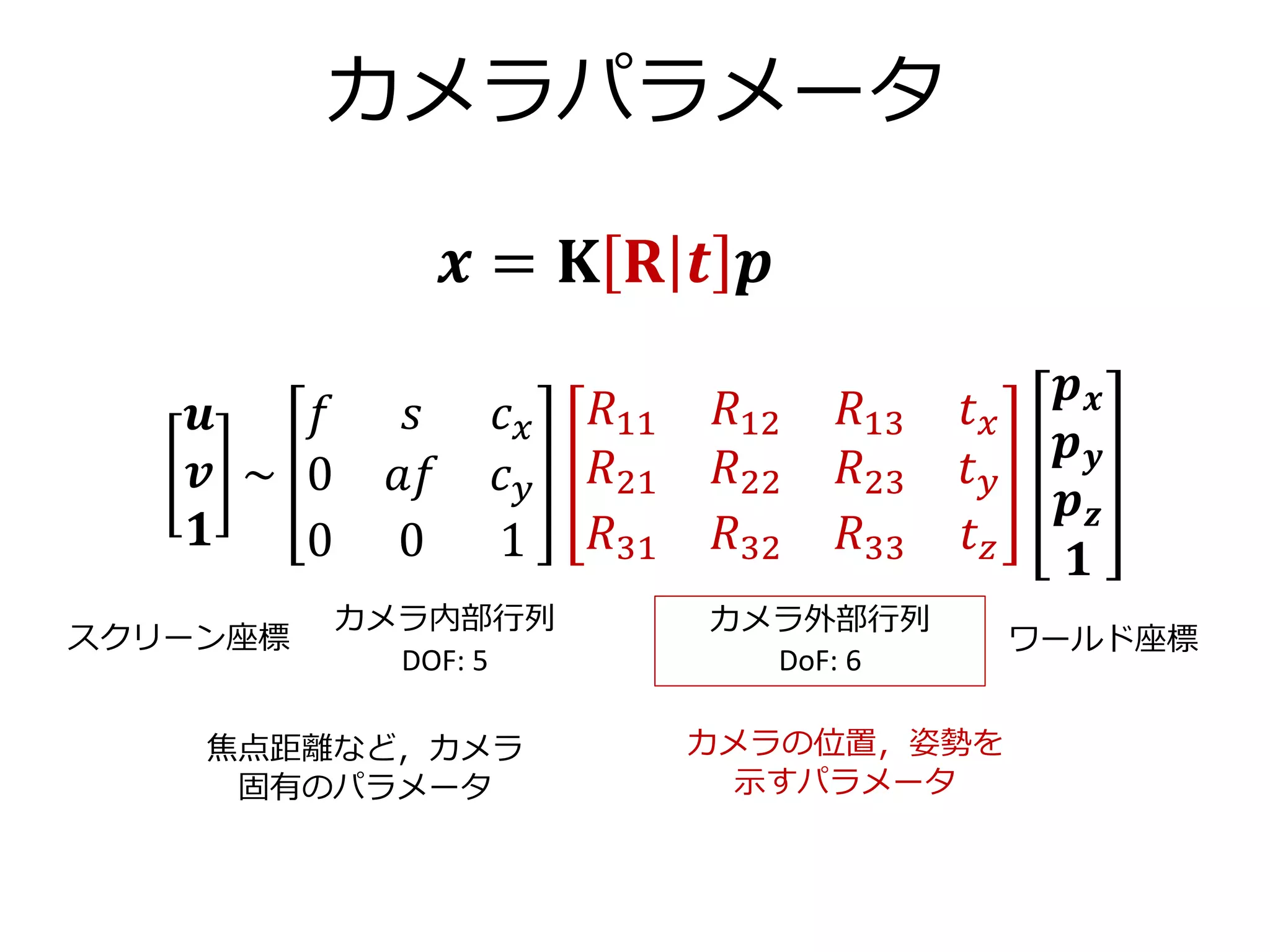
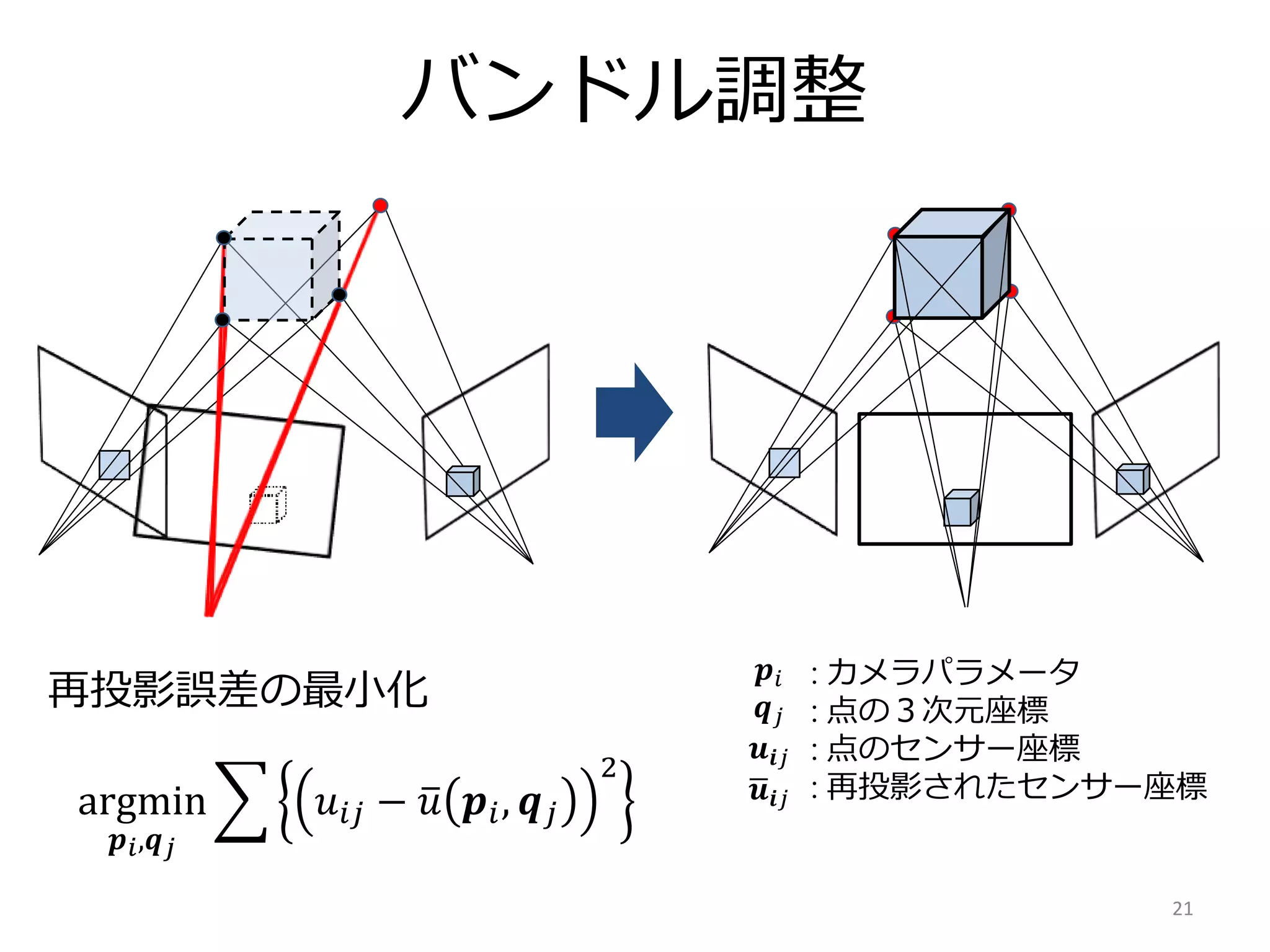
カメラパラメータ
スクリーン座標 ワールド座標
𝒙 =𝐊 𝐑 𝒕 𝒑
𝒖
𝒗
𝟏
~
𝑓 𝑠 𝑐 𝑥
0 𝑎𝑓 𝑐 𝑦
0 0 1
𝑅11 𝑅12 𝑅13 𝑡 𝑥
𝑅21 𝑅22 𝑅23 𝑡 𝑦
𝑅31 𝑅32 𝑅33 𝑡 𝑧
𝒑 𝒙
𝒑 𝒚
𝒑 𝒛
𝟏
カメラ内部行列
DOF: 5
カメラ外部行列
DoF: 6
- 7.
- 8.
- 9.
- 10.
- 11.
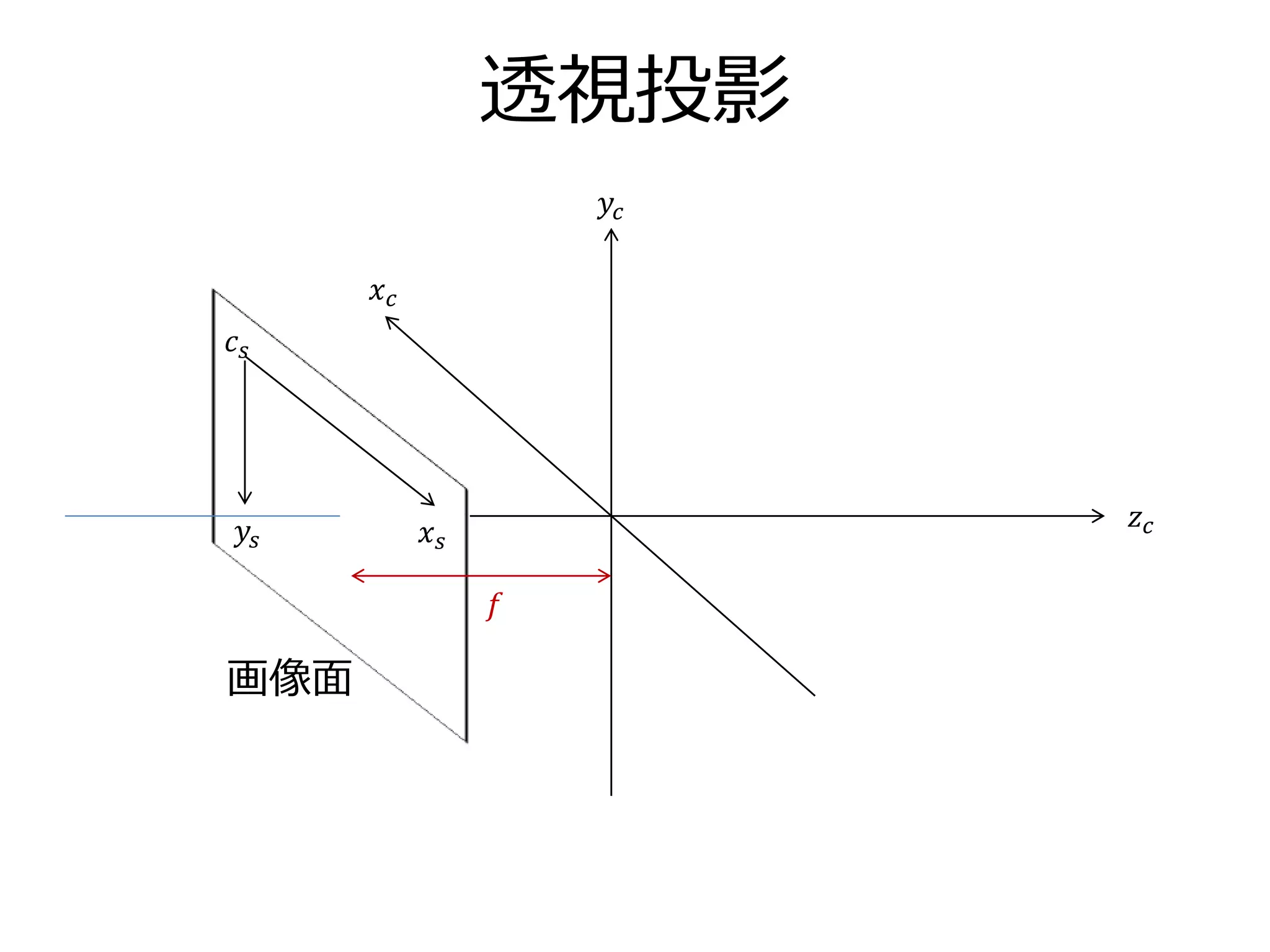
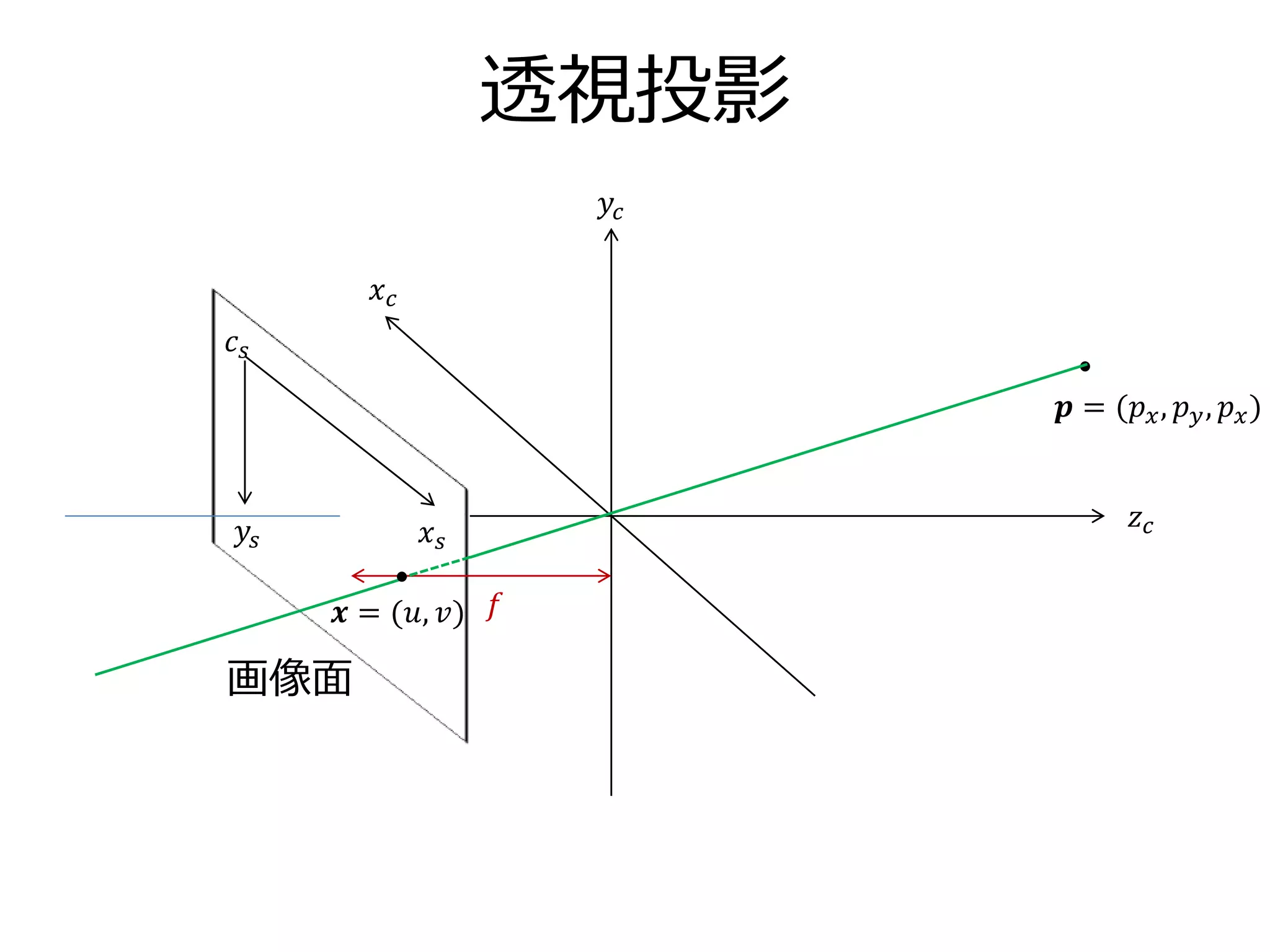
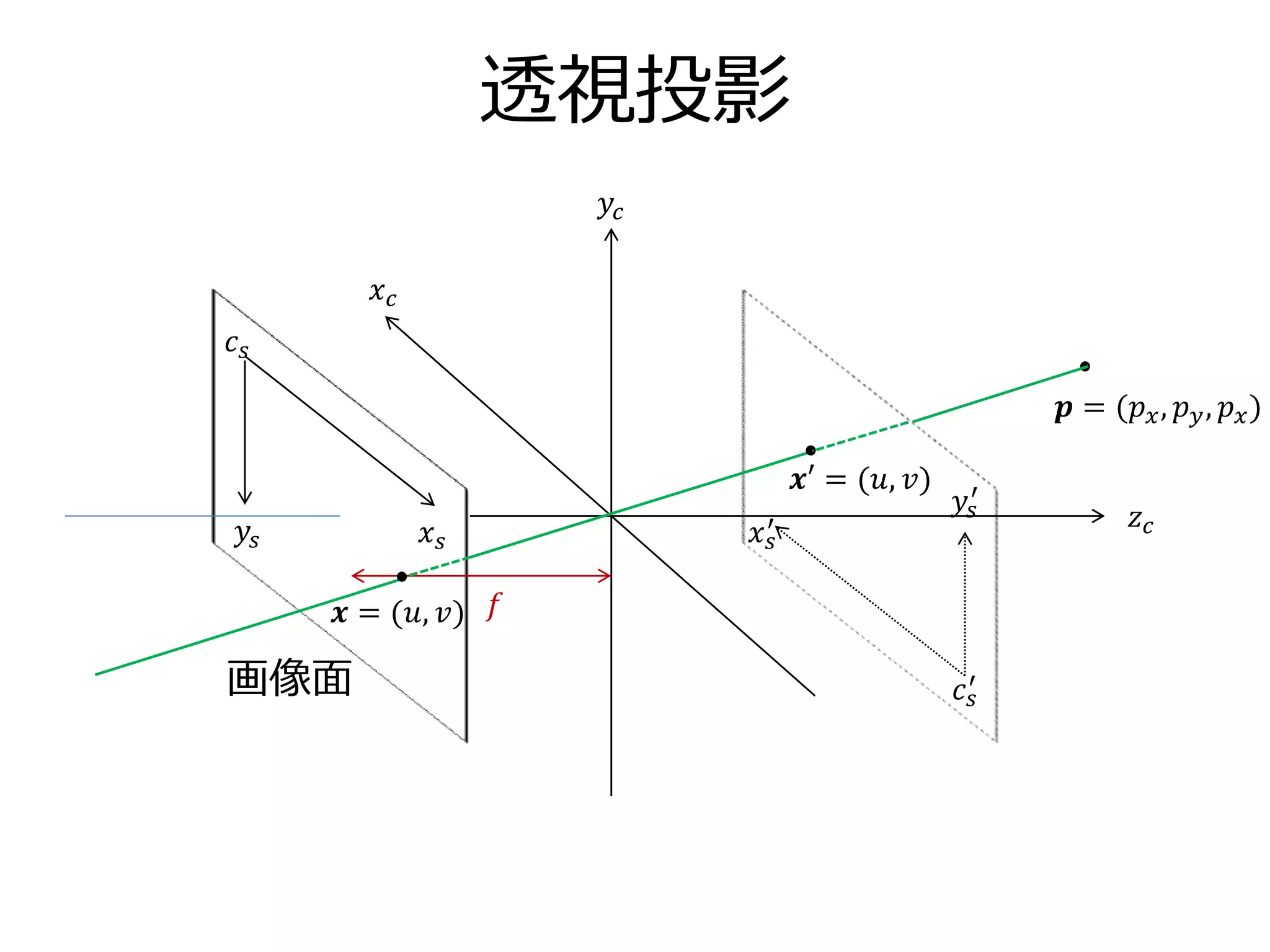
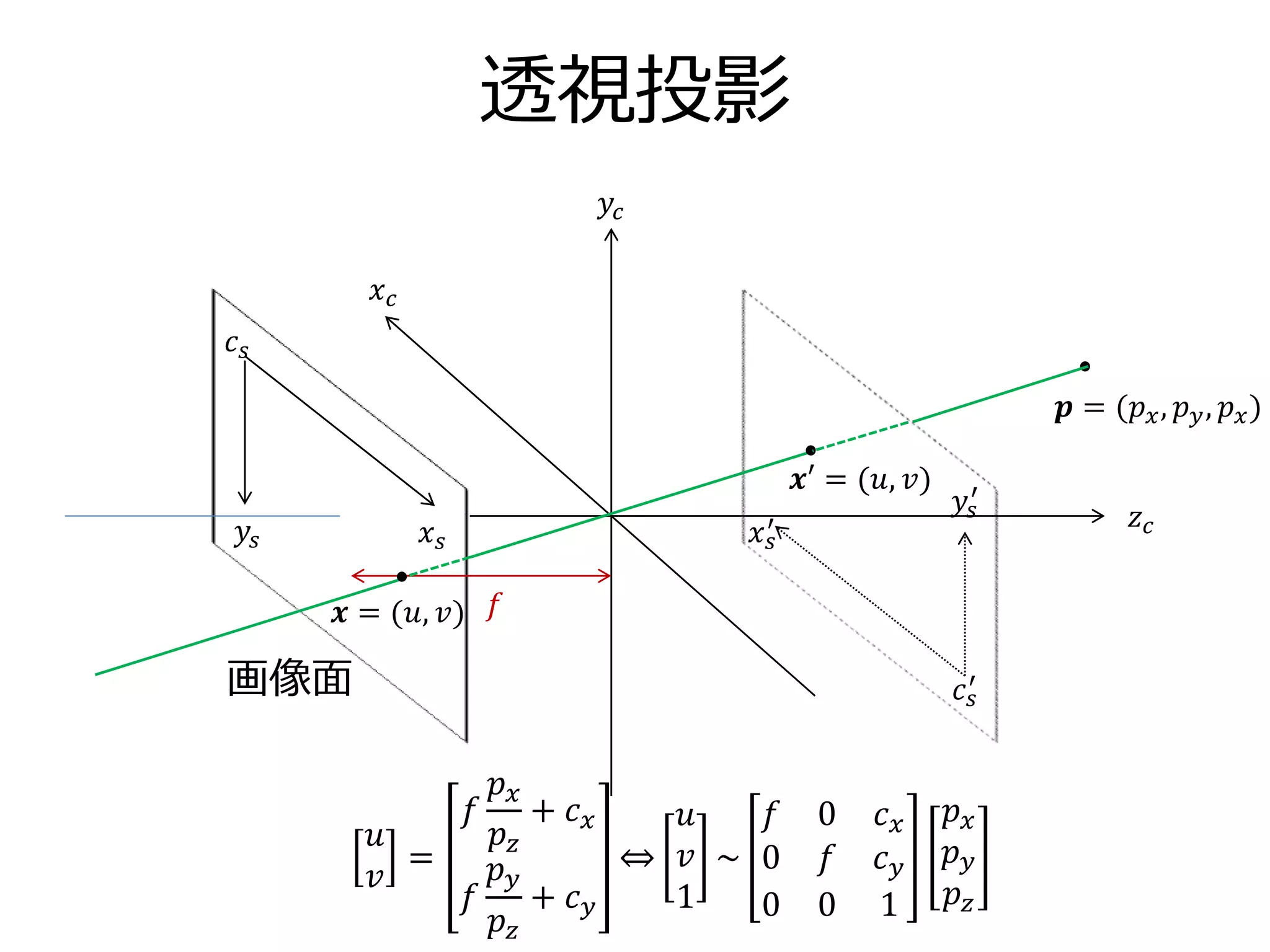
透視投影
𝑐 𝑠
𝑦𝑠
𝑓
𝑥 𝑠
𝑦𝑐
𝑥𝑐
𝑧 𝑐
画像面
𝒑 = (𝑝 𝑥, 𝑝 𝑦, 𝑝 𝑥)
𝒙 = (𝑢, 𝑣)
𝑐 𝑠
′
𝑦𝑠
′
𝑥 𝑠
′
𝒙′ = (𝑢, 𝑣)
𝑢
𝑣
=
𝑓
𝑝 𝑥
𝑝𝑧
+ 𝑐 𝑥
𝑓
𝑝 𝑦
𝑝 𝑧
+ 𝑐 𝑦
⇔
𝑢
𝑣
1
~
𝑓 0 𝑐 𝑥
0 𝑓 𝑐 𝑦
0 0 1
𝑝 𝑥
𝑝 𝑦
𝑝 𝑧
- 12.
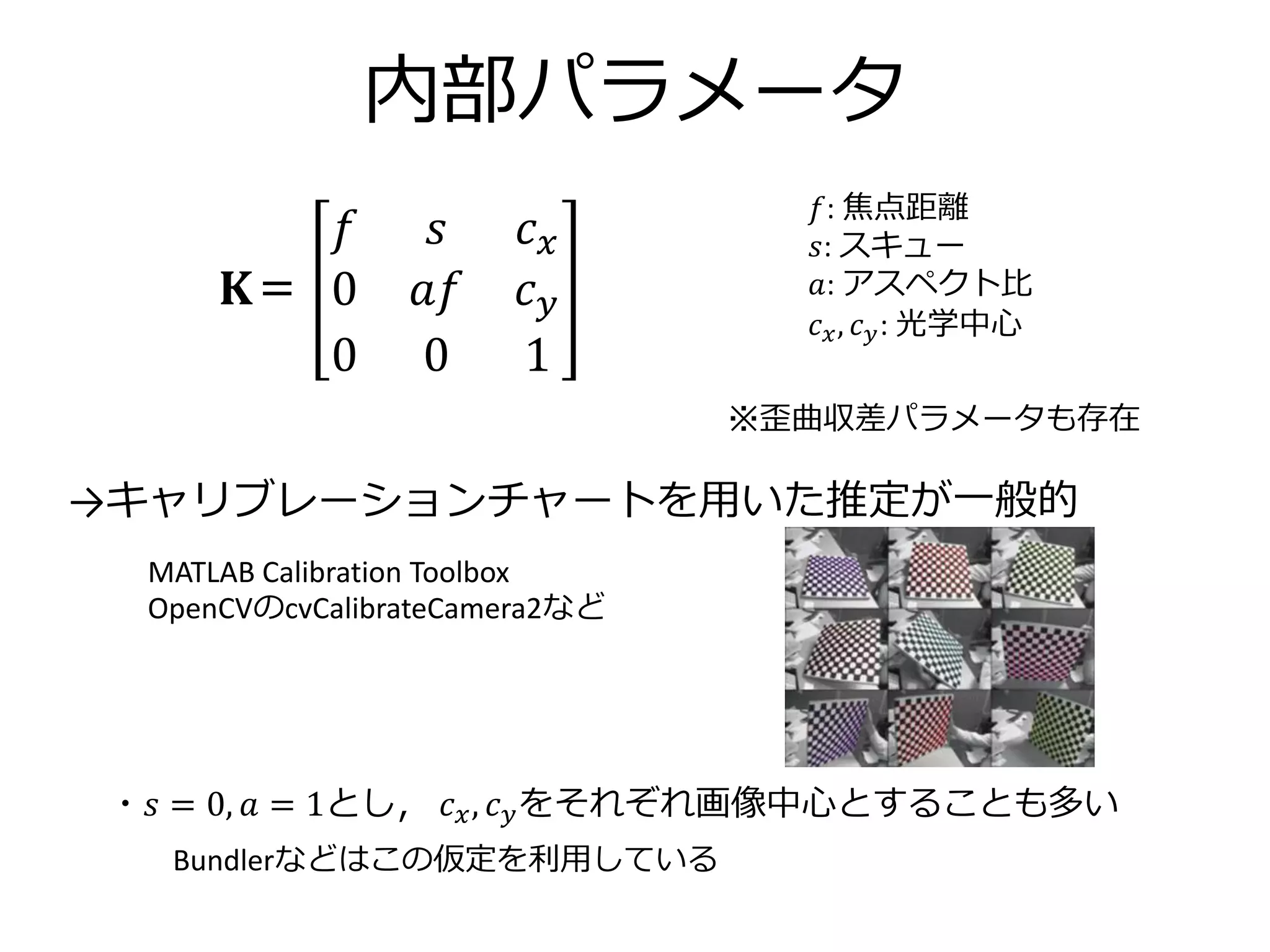
内部パラメータ
𝑓: 焦点距離
𝑠: スキュー
𝑎:アスペクト比
𝑐 𝑥, 𝑐 𝑦: 光学中心
𝐊=
𝑓 𝑠 𝑐 𝑥
0 𝑎𝑓 𝑐 𝑦
0 0 1
※歪曲収差パラメータも存在
→キャリブレーションチャートを用いた推定が一般的
MATLAB Calibration Toolbox
OpenCVのcvCalibrateCamera2など
・𝑠 = 0, 𝑎 = 1とし, 𝑐 𝑥, 𝑐 𝑦をそれぞれ画像中心とすることも多い
Bundlerなどはこの仮定を利用している
- 13.
- 14.
- 15.
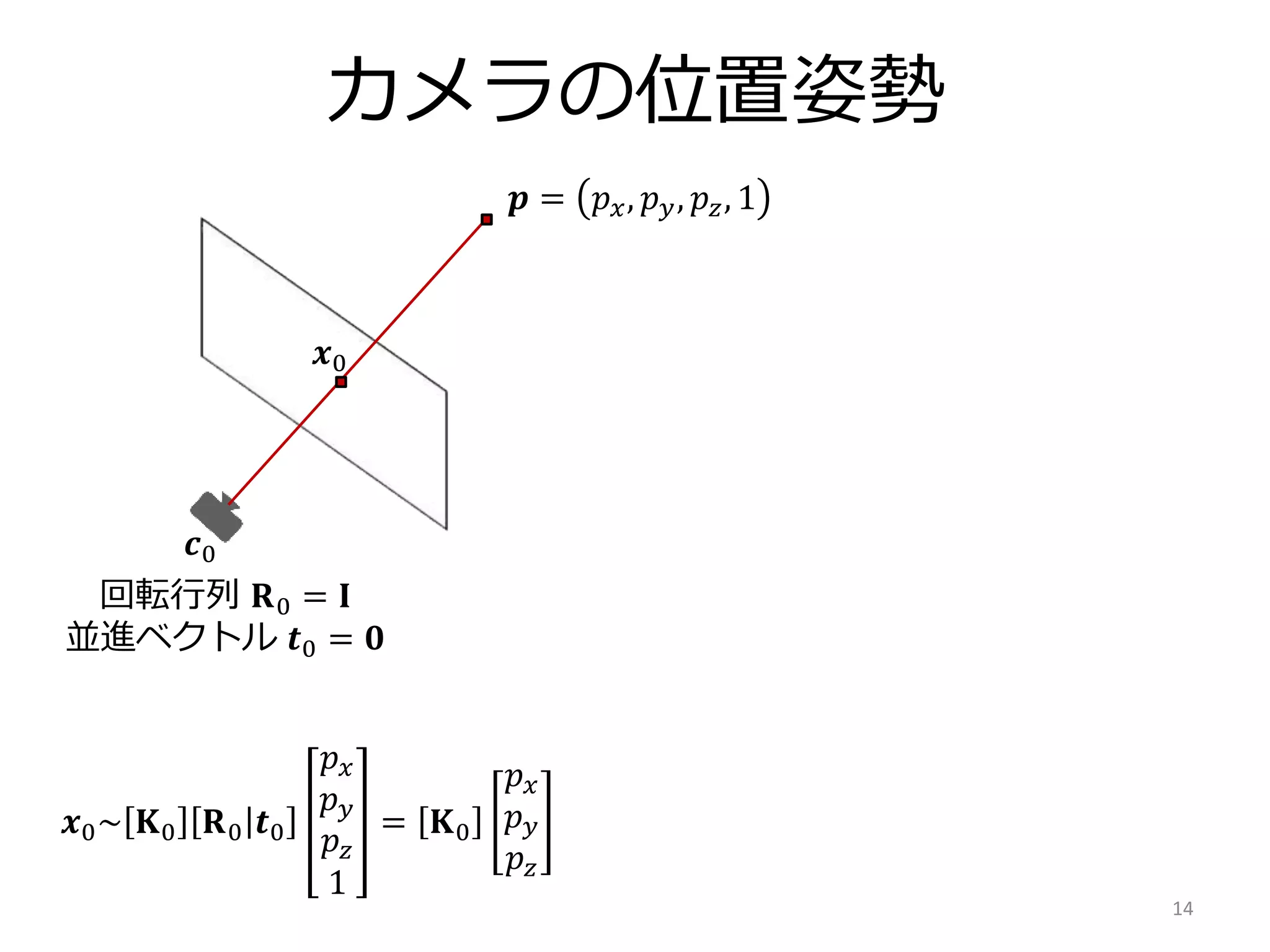
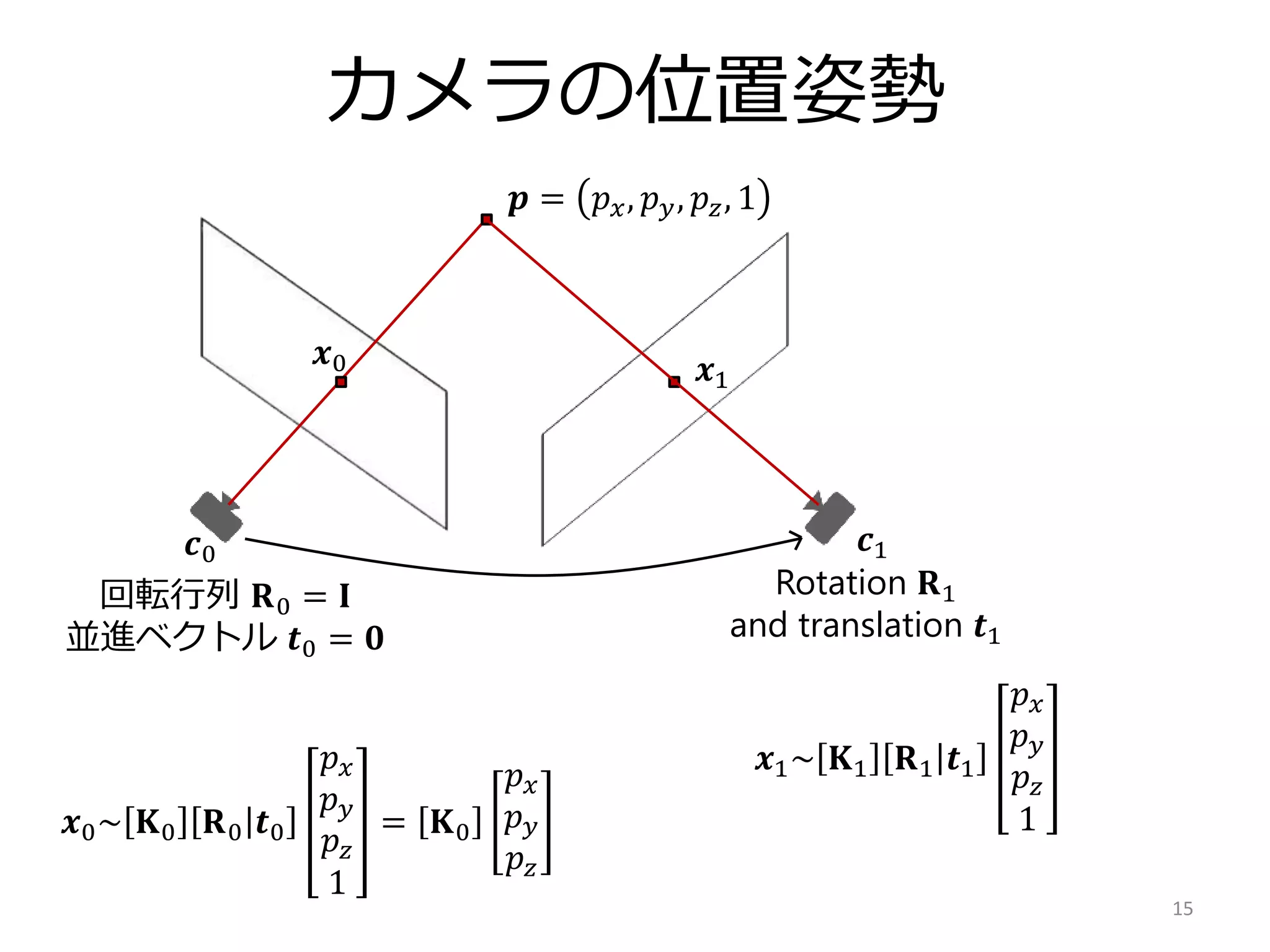
カメラの位置姿勢
15
𝒑 = 𝑝𝑥, 𝑝 𝑦, 𝑝𝑧, 1
𝒙0 𝒙1
Rotation 𝐑1
and translation 𝒕1
𝒄0 𝒄1
回転行列 𝐑0 = 𝐈
並進ベクトル 𝒕0 = 𝟎
𝒙0~ 𝐊0 𝐑0 𝒕0
𝑝 𝑥
𝑝 𝑦
𝑝 𝑧
1
= 𝐊0
𝑝 𝑥
𝑝 𝑦
𝑝 𝑧
𝒙1~ 𝐊1 𝐑1 𝒕1
𝑝 𝑥
𝑝 𝑦
𝑝 𝑧
1
- 16.
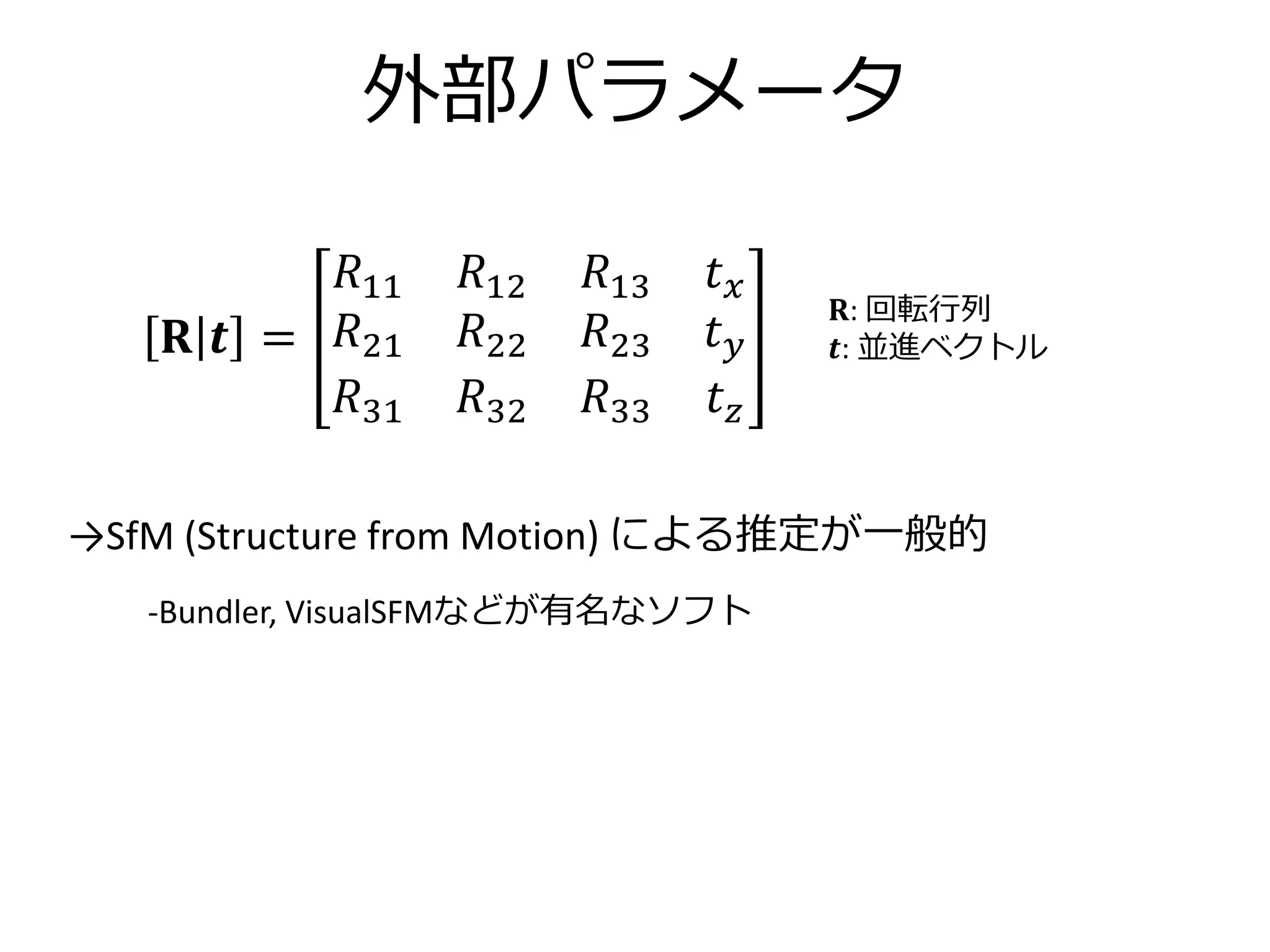
外部パラメータ
𝐑: 回転行列
𝒕: 並進ベクトル𝐑𝒕 =
𝑅11 𝑅12 𝑅13 𝑡 𝑥
𝑅21 𝑅22 𝑅23 𝑡 𝑦
𝑅31 𝑅32 𝑅33 𝑡 𝑧
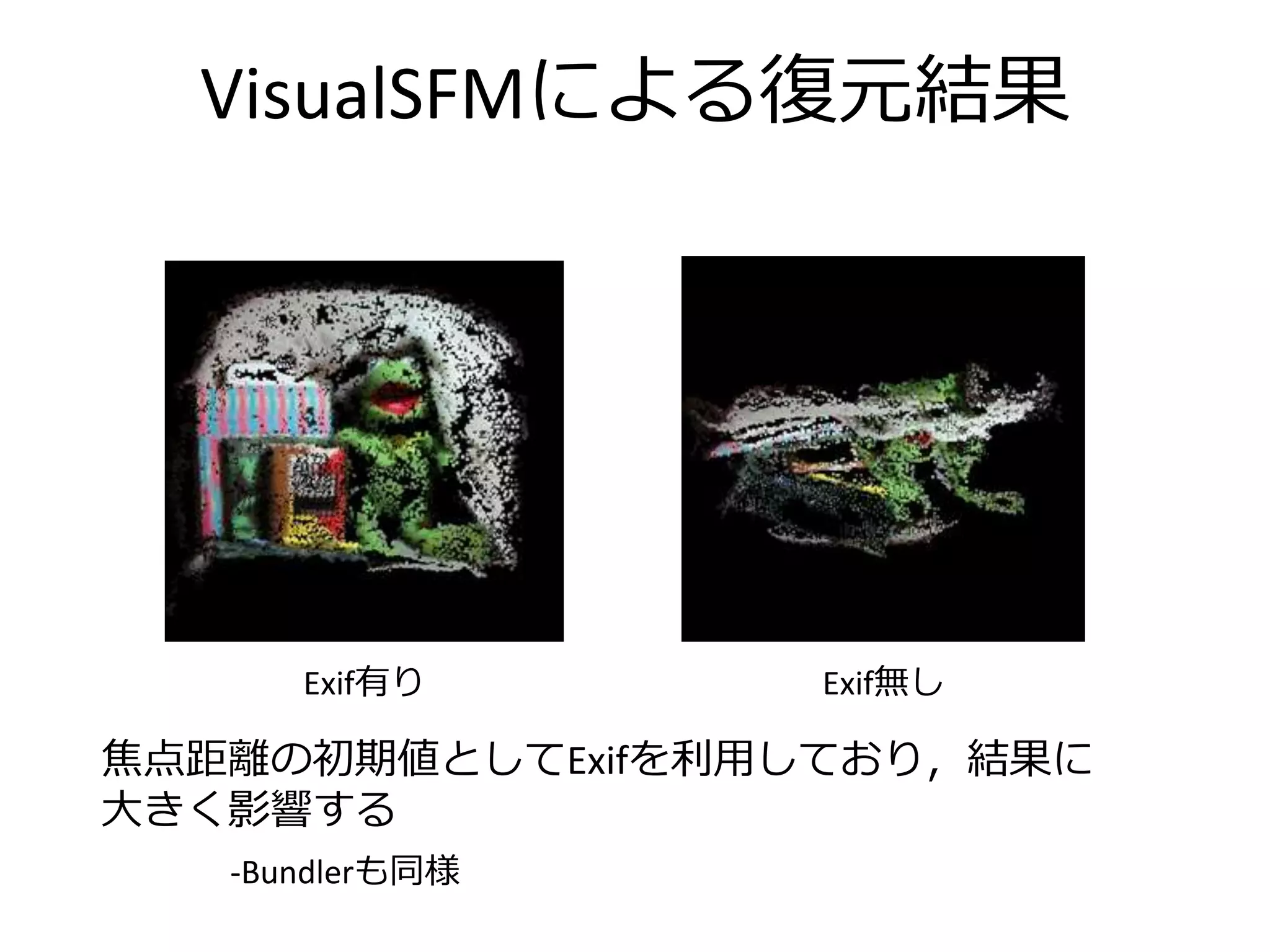
→SfM (Structure from Motion) による推定が一般的
-Bundler, VisualSFMなどが有名なソフト
- 17.
- 18.
Structure from Motion
18
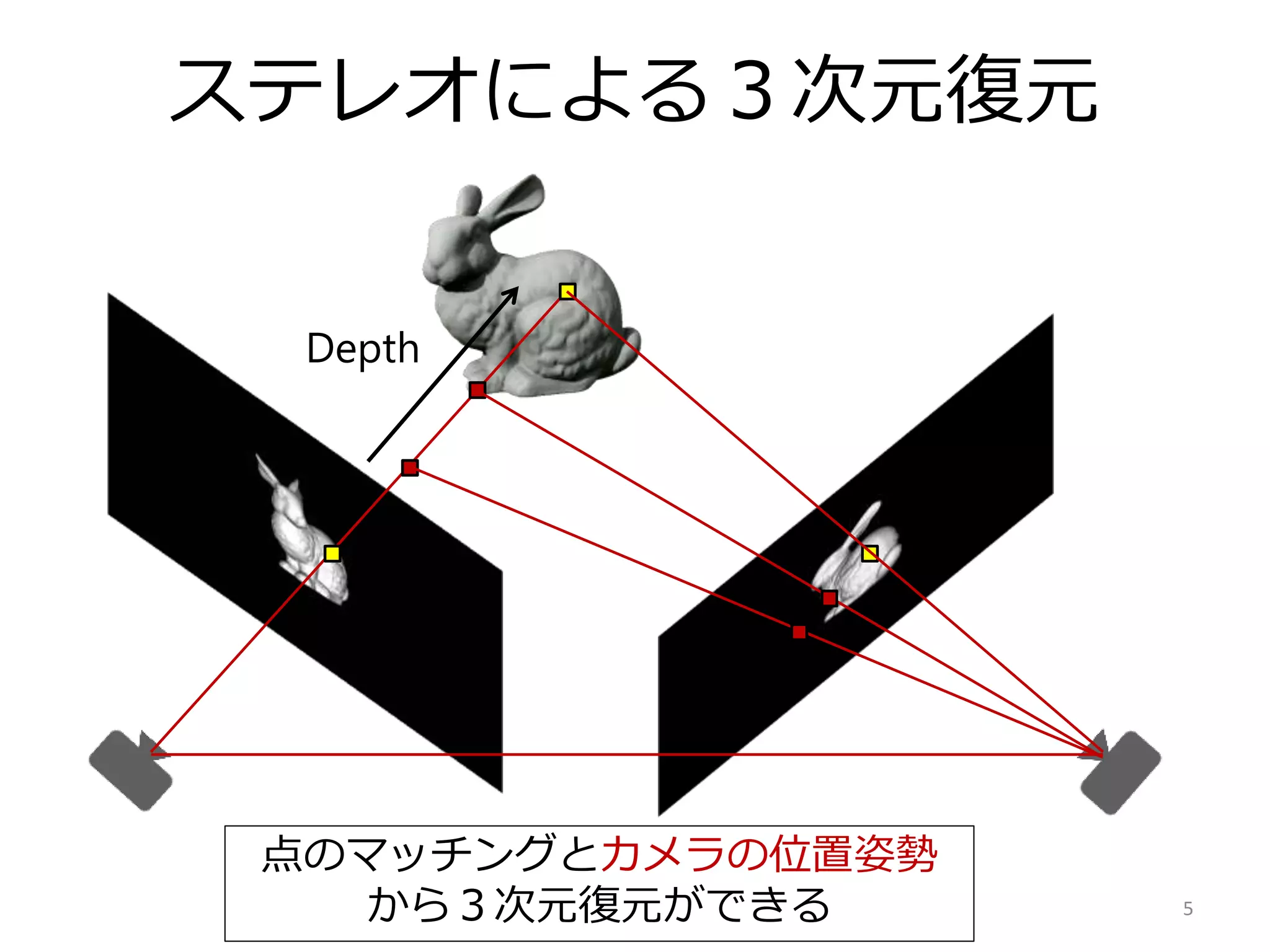
2.基本行列𝐄を対応点の組{(𝒙𝒊𝟏, 𝒙𝒊𝟎)}から求める
(e.g. five-point algorithm, eight-point algorithm)
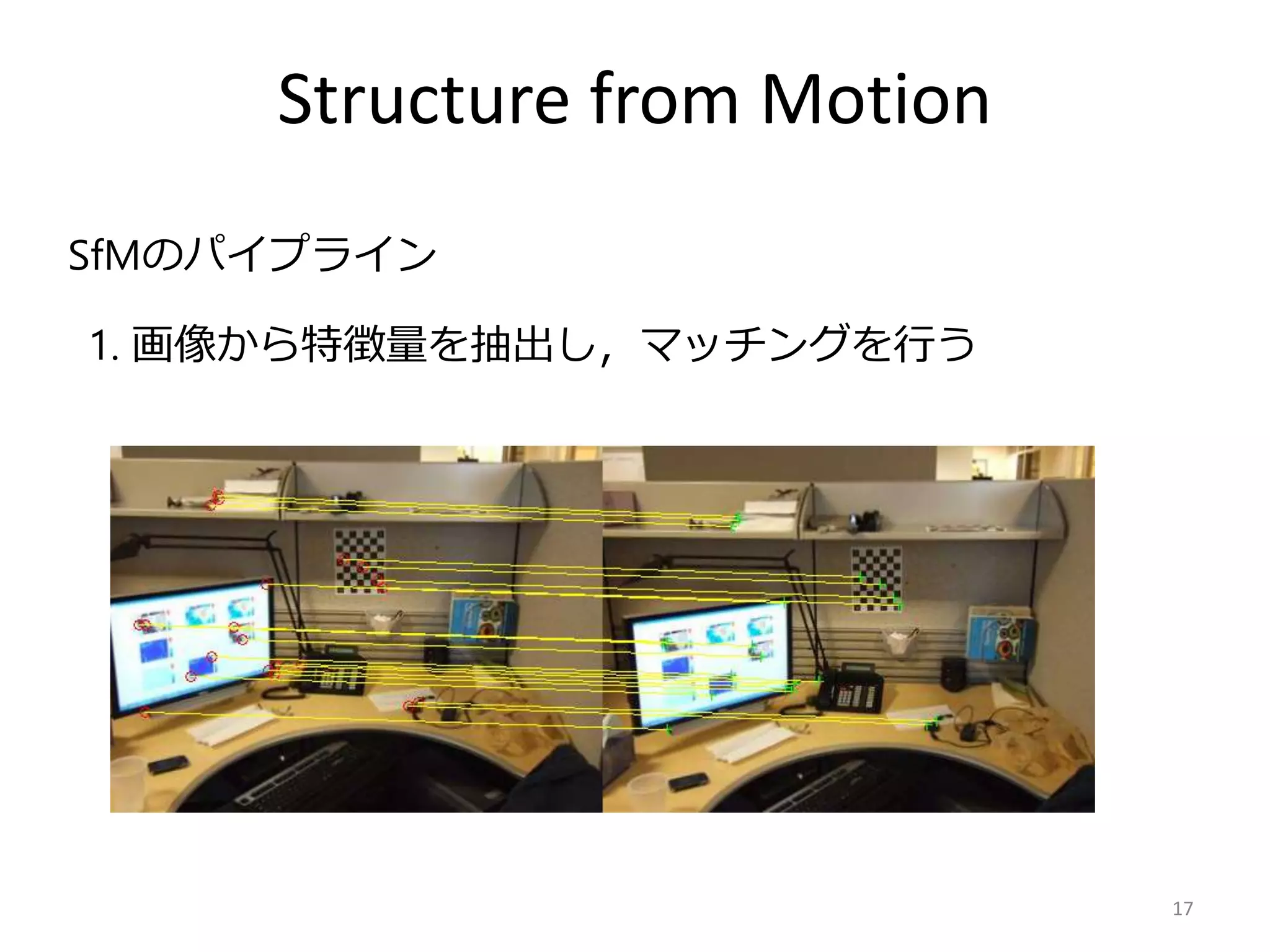
SfMのパイプライン
1. 画像から特徴量を抽出し,マッチングを行う
- 19.
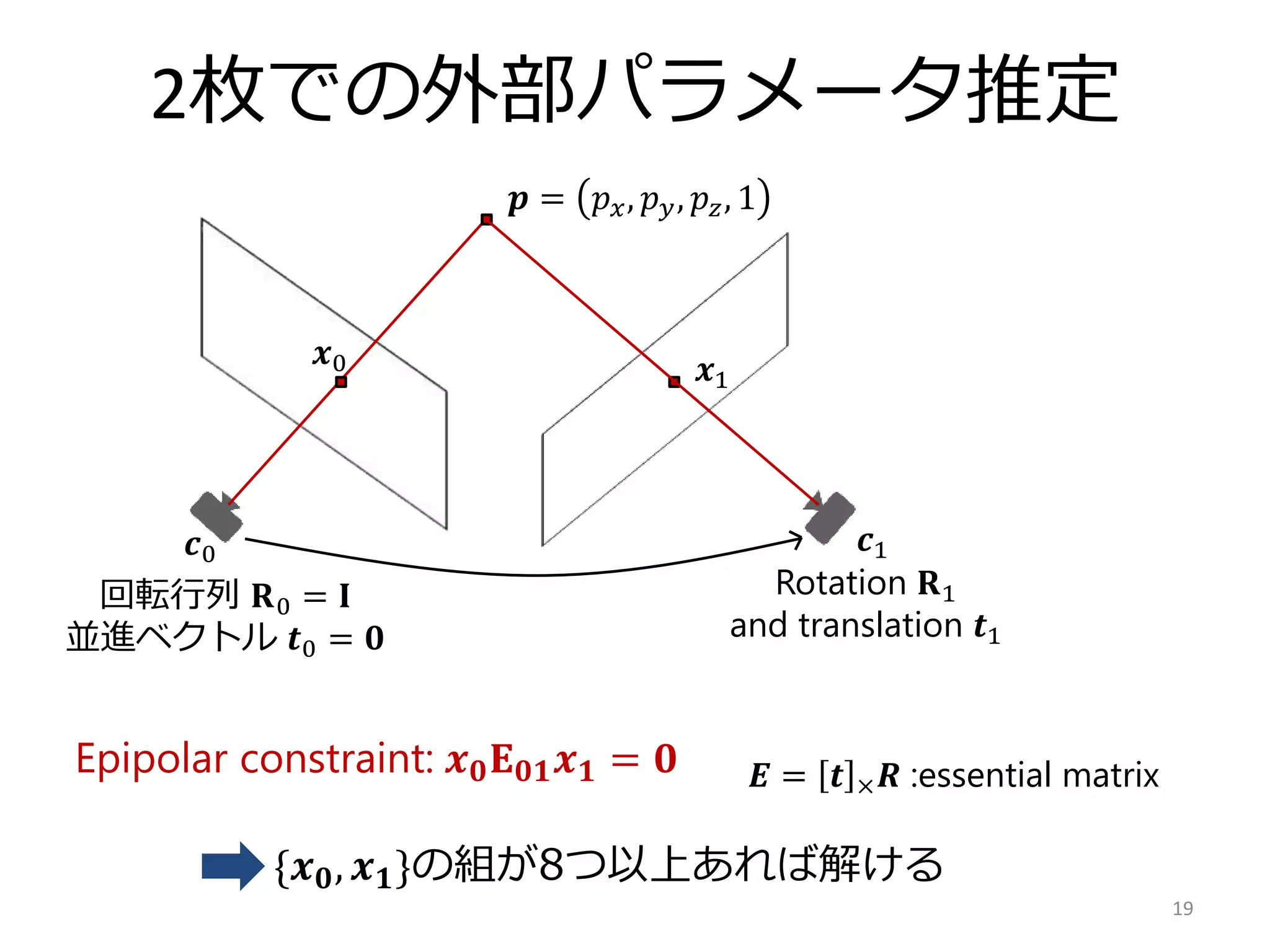
2枚での外部パラメータ推定
19
𝒑 = 𝑝𝑥, 𝑝 𝑦, 𝑝𝑧, 1
𝒙0 𝒙1
Rotation 𝐑1
and translation 𝒕1
𝒄0 𝒄1
回転行列 𝐑0 = 𝐈
並進ベクトル 𝒕0 = 𝟎
Epipolar constraint: 𝒙 𝟎 𝐄 𝟎𝟏 𝒙 𝟏 = 𝟎 𝑬 = 𝒕 × 𝑹 :essential matrix
{𝒙 𝟎, 𝒙 𝟏}の組が8つ以上あれば解ける
- 20.
Structure from Motion
20
2.基本行列𝐄を対応点の組{(𝒙𝒊𝟏, 𝒙𝒊𝟎)}から求める
(e.g. five-point algorithm, eight-point algorithm)
3. バンドル調整による再投影誤差の最小化を行う
SfMのパイプライン
1. 画像から特徴量を抽出し,マッチングを行う
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
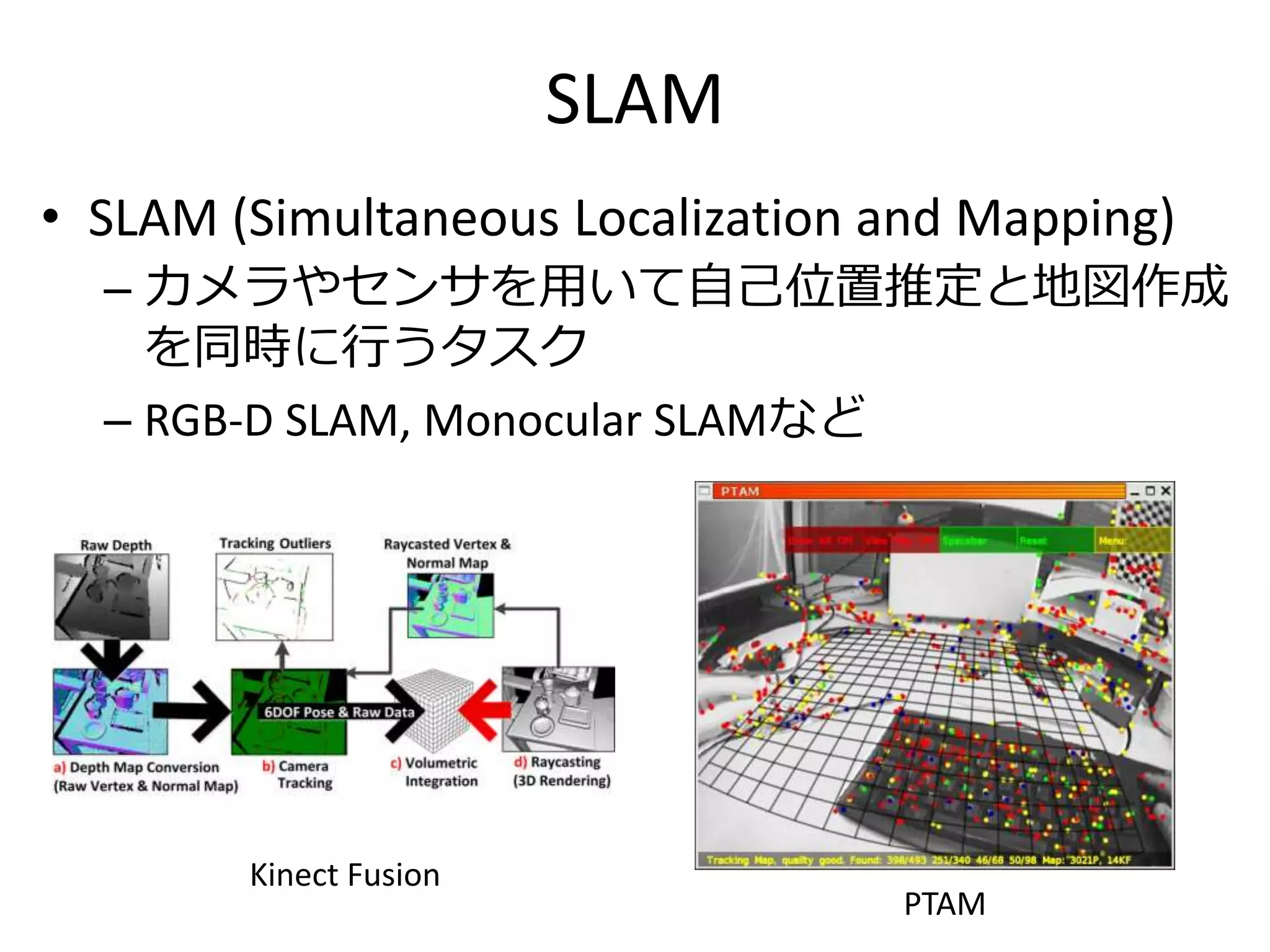
SLAM
• SLAM (SimultaneousLocalization and Mapping)
– カメラやセンサを用いて自己位置推定と地図作成
を同時に行うタスク
– RGB-D SLAM, Monocular SLAMなど
Kinect Fusion
PTAM
- 27.
- 28.
- 29.
- 30.
- 31.