More Related Content

PDF

PDF
![[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0114-220114032933-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra... 
PPTX
大域的探索から局所的探索へデータ拡張 (Data Augmentation)を用いた学習の探索テクニック 
PDF
![SSII2020 [O3-01] Extreme 3D センシング](https://cdn.slidesharecdn.com/ss_thumbnails/200612-ssii-extreme3dsensing-print3-200608114658-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
SSII2020 [O3-01] Extreme 3D センシング 
PDF
フーリエ変換を用いたテクスチャ解像度推定とその応用 
PDF
【DL輪読会】Monocular real time volumetric performance capture What's hot

PDF
Transformer 動向調査 in 画像認識(修正版) ![[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF...](https://cdn.slidesharecdn.com/ss_thumbnails/20210806journalclub-210806023711-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF... ![[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerf20200327slideshare-200326131430-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis 
PDF
【DL輪読会】How Much Can CLIP Benefit Vision-and-Language Tasks? 
PDF
![[DL輪読会]GLIDE: Guided Language to Image Diffusion for Generation and Editing](https://cdn.slidesharecdn.com/ss_thumbnails/glide2-220107030326-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[DL輪読会]GLIDE: Guided Language to Image Diffusion for Generation and Editing ![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute... 
PDF
3次元レジストレーション(PCLデモとコード付き) 
PPTX
How Much Position Information Do Convolutional Neural Networks Encode? ![[DL輪読会]LightTrack: A Generic Framework for Online Top-Down Human Pose Tracking](https://cdn.slidesharecdn.com/ss_thumbnails/200124dlseminar-200124001212-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[DL輪読会]LightTrack: A Generic Framework for Online Top-Down Human Pose Tracking 
PDF
20190706cvpr2019_3d_shape_representation ![SSII2021 [OS2-03] 自己教師あり学習における対照学習の基礎と応用](https://cdn.slidesharecdn.com/ss_thumbnails/os2-04-210605061641-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
SSII2021 [OS2-03] 自己教師あり学習における対照学習の基礎と応用 
PDF

PDF

PDF
SSII2018TS: 3D物体検出とロボットビジョンへの応用 
PDF

PPTX
Swin Transformer (ICCV'21 Best Paper) を完璧に理解する資料 ![[DL輪読会]An Image is Worth 16x16 Words: Transformers for Image Recognition at S...](https://cdn.slidesharecdn.com/ss_thumbnails/dl10161-201016015214-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[DL輪読会]An Image is Worth 16x16 Words: Transformers for Image Recognition at S... ![[DL輪読会]Wav2CLIP: Learning Robust Audio Representations From CLIP](https://cdn.slidesharecdn.com/ss_thumbnails/dlwav2clip1-211105022837-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[DL輪読会]Wav2CLIP: Learning Robust Audio Representations From CLIP 
PDF
動画認識における代表的なモデル・データセット(メタサーベイ) Similar to RAPiD
PPTX
SegFormer: Simple and Efficient Design for Semantic Segmentation with Transfo... 
PPTX

PDF

PDF
【DLゼミ】XFeat: Accelerated Features for Lightweight Image Matching 
PDF
(文献紹介)エッジ保存フィルタ:Side Window Filter, Curvature Filter 
PDF
CVPR 2019 report (30 papers) 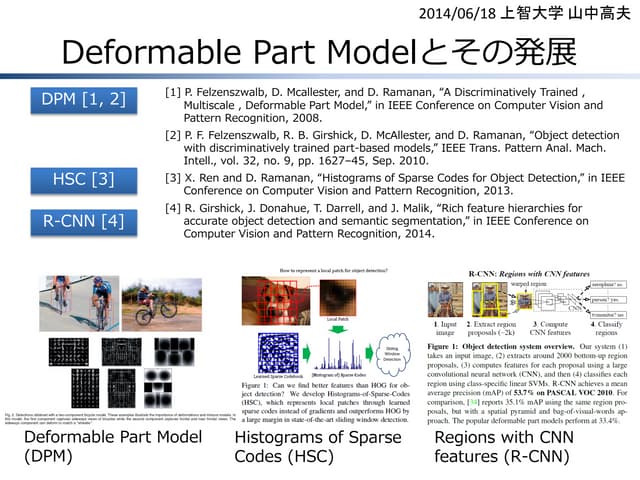
PDF
Deformable Part Modelとその発展 
PDF

PPTX
Angle-Based Outlier Detection周辺の論文紹介 
PDF
(文献紹介) 画像復元:Plug-and-Play ADMM 
PDF
2011/07/16 NagoyaCV_takmin 
PDF
Taking a Deeper Look at the Inverse Compositional Algorithm 
PDF

PDF

PDF

PPTX
DLゼミ: ViTPose: Simple Vision Transformer Baselines for Human Pose Estimation 
PDF
CVPR2019読み会 "A Theory of Fermat Paths for Non-Line-of-Sight Shape Reconstruc... 
PDF
Learning to Solve Hard Minimal Problems 
PDF

PPTX
ArcFace: Additive Angular Margin Loss for Deep Face Recognition More from harmonylab

PDF
Collaborative Document Simplification Using Multi-Agent Systems 
PDF
Can Large Language Models perform Relation-based Argument Mining? 
PDF
UniPAD: A Universal Pre-training Paradigm for Autonomous Driving 
PDF
Efficient anomaly detection in tabular cybersecurity data using large languag... 
PDF
APT-LLM Embedding-Based Anomaly Detection of Cyber Advanced Persistent Threat... 
PDF
CTINexus: Automatic Cyber Threat Intelligence Knowledge Graph Construction Us... 
PDF
Mixture-of-Personas Language Models for Population Simulation 
PDF
QuASAR: A Question-Driven Structure-Aware Approach for Table-to-Text Generation 
PDF
Large Language Model based Multi-Agents: A Survey of Progress and Challenges 
PDF
Mixture-of-Personas Language Models for Population Simulation 
PDF
TransitReID: Transit OD Data Collection with Occlusion-Resistant Dynamic Pass... 
PDF
Data Scaling Laws for End-to-End Autonomous Driving 
PDF
DeepSeek-R1: Incentivizing Reasoning Capability in LLMs via Reinforcement Lea... 
PDF
Is Ego Status All You Need for Open-Loop End-to-End Autonomous Driving? 
PDF
Encoding and Controlling Global Semantics for Long-form Video Question Answering 
PDF
AECR: Automatic attack technique intelligence extraction based on fine-tuned ... 
PDF
Enhancing Zero-Shot Chain-of-Thought Reasoning in Large Language Models throu... 
PDF
Towards Scalable Human-aligned Benchmark for Text-guided Image Editing 
PDF
Multiple Object Tracking as ID Prediction 
PDF
【卒業論文】LLMを用いたMulti-Agent-Debateにおける反論の効果に関する研究 RAPiD
- 1.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
RAPiD: Rotation-Aware People
Detection in Overhead Fisheye
Images
北海道大学 大学院情報科学研究院
情報理工学部門 複合情報工学分野 調和系工学研究室
西浦 翼
- 2.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 Laboratory of Harmonious Systems Engineering Research Group of Synergetic Information Engineering
Division of Computer Science and Information Technology Faculty of Information Science and Technology Hokkaido University – All rights reserved.
論文情報 2
著者
・Zhihao Duan (Boston University)
・M. Ozan Tezcan (Boston University)
・Hayato Nakamura (Boston University)
発表
・CVPR 2020
概要
・天井視点の魚眼画像における人物検出でSoTA
・様々な人物の姿勢に対応できるように矩形の角度を学習するための
損失関数を提案
・天井視点の魚眼画像のデータセットを新たに作成
リンク
・論文 https://arxiv.org/abs/2005.11623
・Git https://github.com/duanzhiihao/RAPiD
- 3.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
研究背景
スマートビルディングの開発
→Occupancy sensing (占有率検知?) が重要
・省エネ
・空間のマネジメント
・セキュリティ (火事、アクティブシューター)
3
- 4.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
研究背景
人数カウント × CV
・広角カメラ
→複数台必要、かさばる
・魚眼カメラ
→物体検出アルゴリズムが横視点・広角用
4
天井視点・魚眼用のアルゴリズムの開発
- 5.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
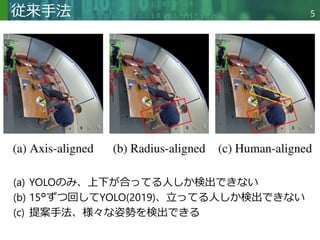
従来手法 5
(a) YOLOのみ、上下が合ってる人しか検出できない
(b) 15°ずつ回してYOLO(2019)、立ってる人しか検出できない
(c) 提案手法、様々な姿勢を検出できる
- 6.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
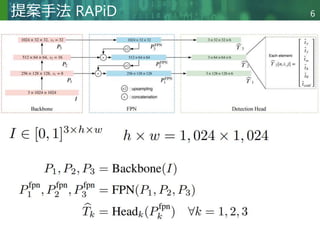
提案手法 RAPiD 6
- 7.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
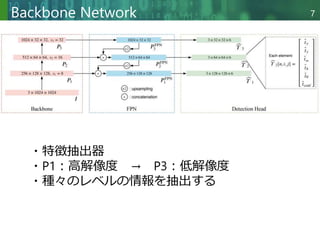
Backbone Network 7
・特徴抽出器
・P1:高解像度 → P3:低解像度
・種々のレベルの情報を抽出する
- 8.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
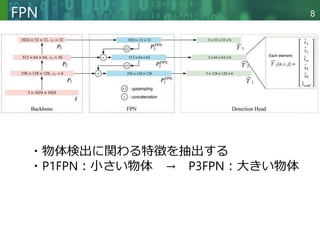
FPN 8
・物体検出に関わる特徴を抽出する
・P1FPN:小さい物体 → P3FPN:大きい物体
- 9.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
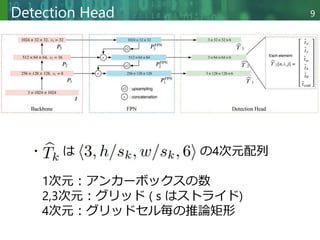
Detection Head 9
・ は の4次元配列
1次元:アンカーボックスの数
2,3次元:グリッド ( s はストライド)
4次元:グリッドセル毎の推論矩形
- 10.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
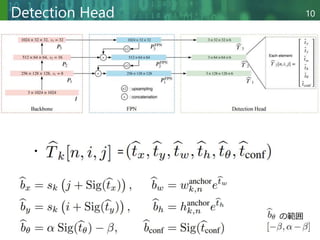
Detection Head 10
・ =
の範囲
- 11.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
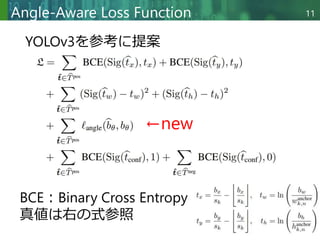
Angle-Aware Loss Function 11
YOLOv3を参考に提案
BCE:Binary Cross Entropy
真値は右の式参照
←new
- 12.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
角度θを損失関数に導入
従来手法 L1, L2距離
角度の周期性を無視
12
・周期性のある損失関数を提案
・パラメータを変更
- 13.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
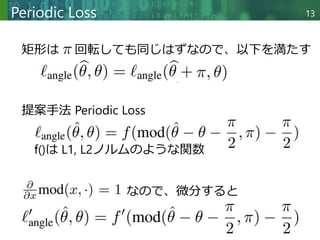
Periodic Loss 13
矩形は 回転しても同じはずなので、以下を満たす
提案手法 Periodic Loss
f()は L1, L2ノルムのような関数
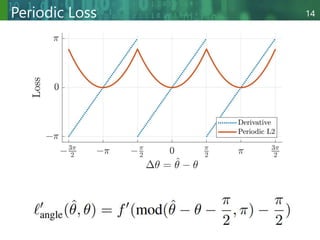
なので、微分すると
- 14.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Periodic Loss 14
- 15.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
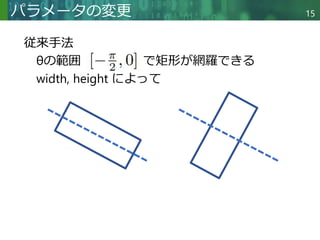
パラメータの変更
従来手法
θの範囲 で矩形が網羅できる
width, height によって
15
- 16.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
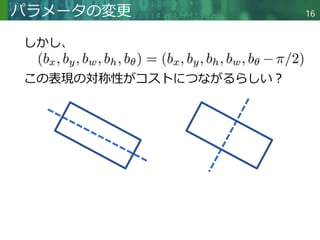
パラメータの変更
しかし、
この表現の対称性がコストにつながるらしい?
16
- 17.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
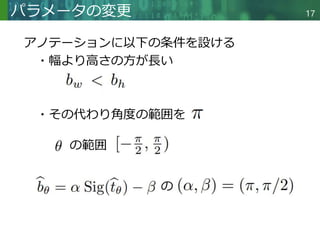
アノテーションに以下の条件を設ける
・幅より高さの方が長い
・その代わり角度の範囲を
の
パラメータの変更 17
の範囲
- 18.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
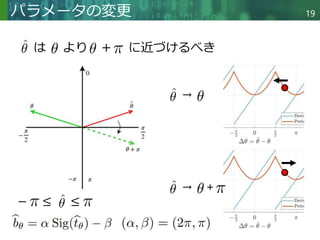
パラメータの変更
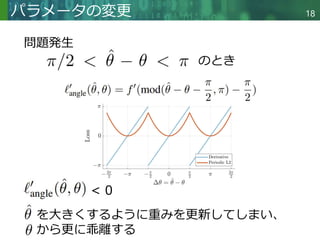
問題発生
のとき
18
< 0
を大きくするように重みを更新してしまい、
から更に乖離する
- 19.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
→
は より + に近づけるべき
パラメータの変更 19
→ +
≤ ≤
−
- 20.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
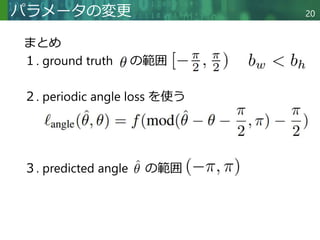
パラメータの変更
まとめ
1. ground truth の範囲
2. periodic angle loss を使う
3. predicted angle の範囲
20
- 21.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
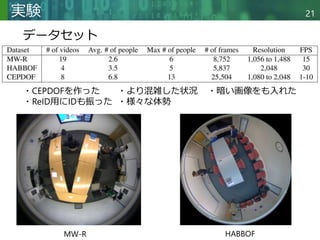
実験
データセット
21
MW-R HABBOF
・CEPDOFを作った
・ReID用にIDも振った
・より混雑した状況
・様々な体勢
・暗い画像をも入れた
- 22.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
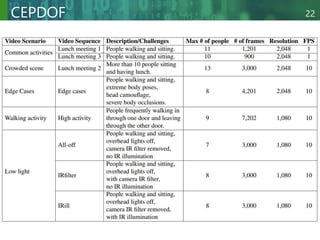
22
CEPDOF
- 23.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
23
実験
• MSCOCO2017で100,000イテレーション学習
• SGDでstep size0.001、momentum0.9、
weight decay0.0005
• 3つのデータセットの一部で6,000イテレー
ションファインチューニング
• 回転、左右反転、リサイズ、color
augmentationも使用
• 3つのデータセットでクロスバリデーション
- 24.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
24
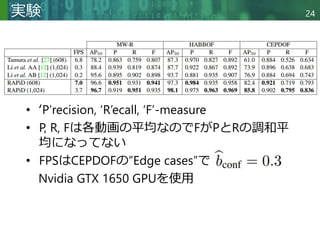
実験
• ‘P’recision, ‘R’ecall, ‘F’-measure
• P, R, Fは各動画の平均なのでFがPとRの調和平
均になってない
• FPSはCEPDOFの”Edge cases”で
Nvidia GTX 1650 GPUを使用
- 25.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
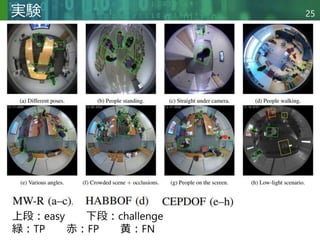
実験 25
上段:easy 下段:challenge
緑:TP 赤:FP 黄:FN
- 26.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
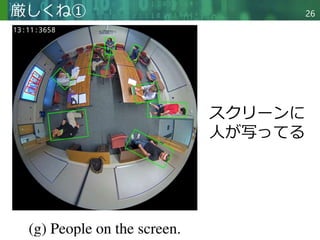
厳しくね① 26
スクリーンに
人が写ってる
- 27.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
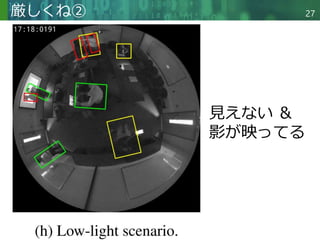
厳しくね② 27
見えない &
影が映ってる
- 28.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
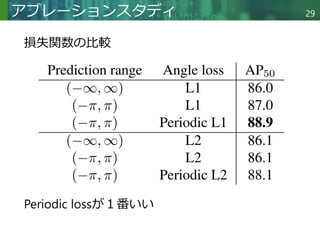
アブレーションスタディ 28
• BaselineはTamura et al[27](広角画像のみ)
• Multi-classからSingle-classにするとAPは下がるが
FPSは上がった
• 魚眼画像でFine-tuningしてAPが大幅向上
• 損失関数と角度のルールを導入してAPが大幅向上
- 29.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
アブレーションスタディ
損失関数の比較
Periodic lossが1番いい
29
- 30.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
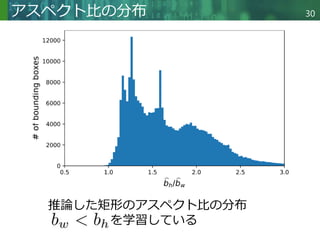
アスペクト比の分布 30
推論した矩形のアスペクト比の分布
を学習している
- 31.
Copyright © 2020調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
まとめ
• 新しい Loss を提案
• 魚眼用人物検出モデルRAPiDを提案
• 新しいデータセットを作成
• 3つのデータセットでSoTA
• 暗い画像では精度が下がるという課題あり
角度の推論が必要な魚眼画像において、周期性
を取り込んだ損失関数の定式化が上手だった
31

• Multi-classからSingle-classにするとAPは下がるが
FPSは上がった
• 魚眼画像でFine-tuningしてAPが大幅向上
• 損失関数と角度のルールを導入してAPが大幅向上](https://image.slidesharecdn.com/rapid-211201052424/85/RAPiD-28-320.jpg)