Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Hironobu Fujiyoshi
PDF, PPTX
42,245 views
Tutorial for robot programming with LEGO mindstorms EV3
LEGO Mindstorms EV3を用いたロボットプログラミングのチュートリアル
Education
◦
Read more
13
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 116
2
/ 116
3
/ 116
4
/ 116
5
/ 116
6
/ 116
7
/ 116
8
/ 116
9
/ 116
10
/ 116
11
/ 116
12
/ 116
13
/ 116
14
/ 116
15
/ 116
16
/ 116
17
/ 116
18
/ 116
19
/ 116
20
/ 116
21
/ 116
22
/ 116
23
/ 116
24
/ 116
25
/ 116
26
/ 116
27
/ 116
28
/ 116
29
/ 116
30
/ 116
31
/ 116
32
/ 116
33
/ 116
34
/ 116
35
/ 116
36
/ 116
37
/ 116
38
/ 116
39
/ 116
40
/ 116
41
/ 116
42
/ 116
43
/ 116
44
/ 116
45
/ 116
46
/ 116
47
/ 116
48
/ 116
49
/ 116
50
/ 116
51
/ 116
52
/ 116
53
/ 116
54
/ 116
55
/ 116
56
/ 116
57
/ 116
58
/ 116
59
/ 116
60
/ 116
61
/ 116
62
/ 116
63
/ 116
64
/ 116
65
/ 116
66
/ 116
67
/ 116
68
/ 116
69
/ 116
70
/ 116
71
/ 116
72
/ 116
73
/ 116
74
/ 116
75
/ 116
76
/ 116
77
/ 116
78
/ 116
79
/ 116
80
/ 116
81
/ 116
82
/ 116
83
/ 116
84
/ 116
85
/ 116
86
/ 116
87
/ 116
88
/ 116
89
/ 116
90
/ 116
91
/ 116
92
/ 116
93
/ 116
94
/ 116
95
/ 116
96
/ 116
97
/ 116
98
/ 116
99
/ 116
100
/ 116
101
/ 116
102
/ 116
103
/ 116
104
/ 116
105
/ 116
106
/ 116
107
/ 116
108
/ 116
109
/ 116
110
/ 116
111
/ 116
112
/ 116
113
/ 116
114
/ 116
115
/ 116
116
/ 116
More Related Content
PDF
確率的自己位置推定
by
Horiguchi Shuhei
PPTX
ホモトピー型理論入門
by
k h
PDF
シンギュラリティサロン20211030ep
by
Masatoshi Yoshida
PDF
ICRA 2019 速報
by
cvpaper. challenge
PDF
オープンソース SLAM の分類
by
Yoshitaka HARA
PPTX
Rise of Representation Engineering
by
The Whole Brain Architecture Initiative
PDF
よくわかるフリストンの自由エネルギー原理
by
Masatoshi Yoshida
PPT
時系列データ分析
by
graySpace999
確率的自己位置推定
by
Horiguchi Shuhei
ホモトピー型理論入門
by
k h
シンギュラリティサロン20211030ep
by
Masatoshi Yoshida
ICRA 2019 速報
by
cvpaper. challenge
オープンソース SLAM の分類
by
Yoshitaka HARA
Rise of Representation Engineering
by
The Whole Brain Architecture Initiative
よくわかるフリストンの自由エネルギー原理
by
Masatoshi Yoshida
時系列データ分析
by
graySpace999
What's hot
PDF
NEDO講座 MoveIt! チュートリアル 第1部
by
openrtm
PDF
Tensorflow Liteの量子化アーキテクチャ
by
HitoshiSHINABE1
PDF
工学系大学4年生のための論文の読み方
by
ychtanaka
PDF
幾何と機械学習: A Short Intro
by
Ichigaku Takigawa
PDF
ARM CPUにおけるSIMDを用いた高速計算入門
by
Fixstars Corporation
PDF
研究発表を準備する(2022年版)
by
Takayuki Itoh
PDF
時系列解析の使い方 - TokyoWebMining #17
by
horihorio
PPTX
社会心理学者のための時系列分析入門_小森
by
Masashi Komori
PDF
自由エネルギー原理と視覚的意識 2019-06-08
by
Masatoshi Yoshida
PDF
第6回WBAシンポジウム:脳参照アーキテクチャ 駆動開発からの AGI構築ロードマップ
by
The Whole Brain Architecture Initiative
PDF
Data-Centric AI開発における データ生成の取り組み
by
Takeshi Suzuki
PDF
CF-FinML 金融時系列予測のための機械学習
by
Katsuya Ito
PPTX
研究発表用スライドテンプレート
by
Hisashi Ishihara
PDF
自由エネルギー原理から エナクティヴィズムへ
by
Masatoshi Yoshida
PDF
Sparse Codingをなるべく数式を使わず理解する(PCAやICAとの関係)
by
Teppei Kurita
PDF
『自由エネルギー原理入門』勉強会1章&2章前半
by
大地 紺野
PDF
06 第5.1節-第5.7節 ROS2に対応したツール/パッケージ
by
Mori Ken
PDF
t-SNE
by
貴之 八木
PDF
[DL輪読会]Deep Neural Networks as Gaussian Processes
by
Deep Learning JP
PDF
パターン認識第9章 学習ベクトル量子化
by
Miyoshi Yuya
NEDO講座 MoveIt! チュートリアル 第1部
by
openrtm
Tensorflow Liteの量子化アーキテクチャ
by
HitoshiSHINABE1
工学系大学4年生のための論文の読み方
by
ychtanaka
幾何と機械学習: A Short Intro
by
Ichigaku Takigawa
ARM CPUにおけるSIMDを用いた高速計算入門
by
Fixstars Corporation
研究発表を準備する(2022年版)
by
Takayuki Itoh
時系列解析の使い方 - TokyoWebMining #17
by
horihorio
社会心理学者のための時系列分析入門_小森
by
Masashi Komori
自由エネルギー原理と視覚的意識 2019-06-08
by
Masatoshi Yoshida
第6回WBAシンポジウム:脳参照アーキテクチャ 駆動開発からの AGI構築ロードマップ
by
The Whole Brain Architecture Initiative
Data-Centric AI開発における データ生成の取り組み
by
Takeshi Suzuki
CF-FinML 金融時系列予測のための機械学習
by
Katsuya Ito
研究発表用スライドテンプレート
by
Hisashi Ishihara
自由エネルギー原理から エナクティヴィズムへ
by
Masatoshi Yoshida
Sparse Codingをなるべく数式を使わず理解する(PCAやICAとの関係)
by
Teppei Kurita
『自由エネルギー原理入門』勉強会1章&2章前半
by
大地 紺野
06 第5.1節-第5.7節 ROS2に対応したツール/パッケージ
by
Mori Ken
t-SNE
by
貴之 八木
[DL輪読会]Deep Neural Networks as Gaussian Processes
by
Deep Learning JP
パターン認識第9章 学習ベクトル量子化
by
Miyoshi Yuya
Similar to Tutorial for robot programming with LEGO mindstorms EV3
PDF
ヒューマノイドのアプリ開発とモーション生成AIの導入 ROS JP UG #51
by
holypong
PDF
自律走行ロボットをプログラミングするということ ~ETロボコンの場合~
by
Shin-ya Koga
PDF
機械図面の基礎
by
Yuki Suga
PDF
2020年10月29日 プロフェッショナルAI×Roboticsエンジニアへのロードマップ
by
NVIDIA Japan
PDF
RTコンポーネント作成入門
by
openrtm
PDF
PythonからV-Sido CONNECTで ロボットを操る ~ ハードウェアの絡んだ仕組みの制御を考える ~
by
Daisuke Imai
PPTX
[DL輪読会]TossingBot: Learning to Throw Arbitrary Objects with Residual Physics
by
Deep Learning JP
PDF
画像認識 走行プレゼン
by
HanpenRobot
PPTX
EV3 + MonoBrick + C#
by
Masuda Tomoaki
PPT
Brain-Inspired Robotics and Neural Dynamics: Lecture 01 (2015)
by
Hiroaki Wagatsuma
PDF
201110 01 Polytech Center 1
by
openrtm
PPTX
20141101 大田区民大学での講演「実際にロボットを動かす方法」
by
Ryuichi Ueda
PPTX
arduinoで制御するロボットのワークショップ
by
株式会社芳和システムデザイン(Houwa System Design K.K.)
PDF
Yamauchi b
by
harmonylab
PDF
実社会・実環境におけるロボットの機械学習
by
Kuniyuki Takahashi
PDF
人工知能学会RTM講習会 第3部:プログラミング実習
by
openrtm
PPTX
ETロボについて
by
Futa HIRAKOBA
PPTX
【Long ver】 ワークショップカリキュラム、思い通りにロボットを動かしてみよう!
by
Romotive Japan
PPTX
Node red lt2020
by
英俊 高山
PPTX
2020 08-01 ALGYAN AI&ロボティクス (1)
by
Akira Tateishi
ヒューマノイドのアプリ開発とモーション生成AIの導入 ROS JP UG #51
by
holypong
自律走行ロボットをプログラミングするということ ~ETロボコンの場合~
by
Shin-ya Koga
機械図面の基礎
by
Yuki Suga
2020年10月29日 プロフェッショナルAI×Roboticsエンジニアへのロードマップ
by
NVIDIA Japan
RTコンポーネント作成入門
by
openrtm
PythonからV-Sido CONNECTで ロボットを操る ~ ハードウェアの絡んだ仕組みの制御を考える ~
by
Daisuke Imai
[DL輪読会]TossingBot: Learning to Throw Arbitrary Objects with Residual Physics
by
Deep Learning JP
画像認識 走行プレゼン
by
HanpenRobot
EV3 + MonoBrick + C#
by
Masuda Tomoaki
Brain-Inspired Robotics and Neural Dynamics: Lecture 01 (2015)
by
Hiroaki Wagatsuma
201110 01 Polytech Center 1
by
openrtm
20141101 大田区民大学での講演「実際にロボットを動かす方法」
by
Ryuichi Ueda
arduinoで制御するロボットのワークショップ
by
株式会社芳和システムデザイン(Houwa System Design K.K.)
Yamauchi b
by
harmonylab
実社会・実環境におけるロボットの機械学習
by
Kuniyuki Takahashi
人工知能学会RTM講習会 第3部:プログラミング実習
by
openrtm
ETロボについて
by
Futa HIRAKOBA
【Long ver】 ワークショップカリキュラム、思い通りにロボットを動かしてみよう!
by
Romotive Japan
Node red lt2020
by
英俊 高山
2020 08-01 ALGYAN AI&ロボティクス (1)
by
Akira Tateishi
More from Hironobu Fujiyoshi
PDF
MIRU2013チュートリアル:SIFTとそれ以降のアプローチ
by
Hironobu Fujiyoshi
PDF
統計的学習手法よる人検出
by
Hironobu Fujiyoshi
PDF
MIRU2020長尾賞受賞論文解説:Attention Branch Networkの展開
by
Hironobu Fujiyoshi
PDF
Random Forests
by
Hironobu Fujiyoshi
PDF
画像認識における特徴表現 -SSII技術マップの再考-
by
Hironobu Fujiyoshi
PDF
-SSIIの技術マップ- 過去•現在, そして未来 [領域]認識
by
Hironobu Fujiyoshi
PDF
ICCV2011 report
by
Hironobu Fujiyoshi
PDF
統計的学習手法による物体検出の高精度化と効率化 -人検出の実用化に向けて-
by
Hironobu Fujiyoshi
PDF
VIEW2013 Binarycode-based Object Recognition
by
Hironobu Fujiyoshi
PDF
チュートリアルのススメ -チュートリアルのためのチュートリアル-
by
Hironobu Fujiyoshi
PDF
藤吉研究室10周年記念「これまで10年,ここから10年」
by
Hironobu Fujiyoshi
PDF
Inside-Outカメラからの3次元Scan Pathとシーン構造の復元
by
Hironobu Fujiyoshi
PDF
ROSを核としたロボティクス教育(中部大学ロボット理工学科の紹介)
by
Hironobu Fujiyoshi
PDF
第6回 京都大学-稲盛財団合同京都賞シンポジウム
by
Hironobu Fujiyoshi
PDF
Problem Based Learning with LEGO Mindstorms
by
Hironobu Fujiyoshi
PDF
知識転移グラフによる複数ネットワークの 共同学習
by
Hironobu Fujiyoshi
PDF
次世代セキュリティを牽引する画像解析技術の最新動向 - 距離情報を用いた物体認識技術 -
by
Hironobu Fujiyoshi
PDF
エッジにおける深層学習の推論処理の効率化
by
Hironobu Fujiyoshi
PDF
【第40回AIセミナー】「説明できるAI 〜AIはブラックボックスなのか?〜」
by
Hironobu Fujiyoshi
MIRU2013チュートリアル:SIFTとそれ以降のアプローチ
by
Hironobu Fujiyoshi
統計的学習手法よる人検出
by
Hironobu Fujiyoshi
MIRU2020長尾賞受賞論文解説:Attention Branch Networkの展開
by
Hironobu Fujiyoshi
Random Forests
by
Hironobu Fujiyoshi
画像認識における特徴表現 -SSII技術マップの再考-
by
Hironobu Fujiyoshi
-SSIIの技術マップ- 過去•現在, そして未来 [領域]認識
by
Hironobu Fujiyoshi
ICCV2011 report
by
Hironobu Fujiyoshi
統計的学習手法による物体検出の高精度化と効率化 -人検出の実用化に向けて-
by
Hironobu Fujiyoshi
VIEW2013 Binarycode-based Object Recognition
by
Hironobu Fujiyoshi
チュートリアルのススメ -チュートリアルのためのチュートリアル-
by
Hironobu Fujiyoshi
藤吉研究室10周年記念「これまで10年,ここから10年」
by
Hironobu Fujiyoshi
Inside-Outカメラからの3次元Scan Pathとシーン構造の復元
by
Hironobu Fujiyoshi
ROSを核としたロボティクス教育(中部大学ロボット理工学科の紹介)
by
Hironobu Fujiyoshi
第6回 京都大学-稲盛財団合同京都賞シンポジウム
by
Hironobu Fujiyoshi
Problem Based Learning with LEGO Mindstorms
by
Hironobu Fujiyoshi
知識転移グラフによる複数ネットワークの 共同学習
by
Hironobu Fujiyoshi
次世代セキュリティを牽引する画像解析技術の最新動向 - 距離情報を用いた物体認識技術 -
by
Hironobu Fujiyoshi
エッジにおける深層学習の推論処理の効率化
by
Hironobu Fujiyoshi
【第40回AIセミナー】「説明できるAI 〜AIはブラックボックスなのか?〜」
by
Hironobu Fujiyoshi
Tutorial for robot programming with LEGO mindstorms EV3
1.
実践ロボットプログラミング LEGO Mindstorms EV3
で目指せロボコン! CU-Robocon講習会 WEB:http://robot-programming.jp/ 担当:藤吉弘亘(中部大学工学部ロボット理工学科) E-mail:hf@cs.chubu.ac.jp 1
2.
■ ロボットとは 2
3.
ロボットとは? • その定義を考えてみよう
3 国語大辞典によると: 「人間に類似した形態をもち、自動的に作業を行う機械装置」 おすすめ: 「感じる、判断する、動くの三つがそなわっている人工物」 (東嶋和子)
4.
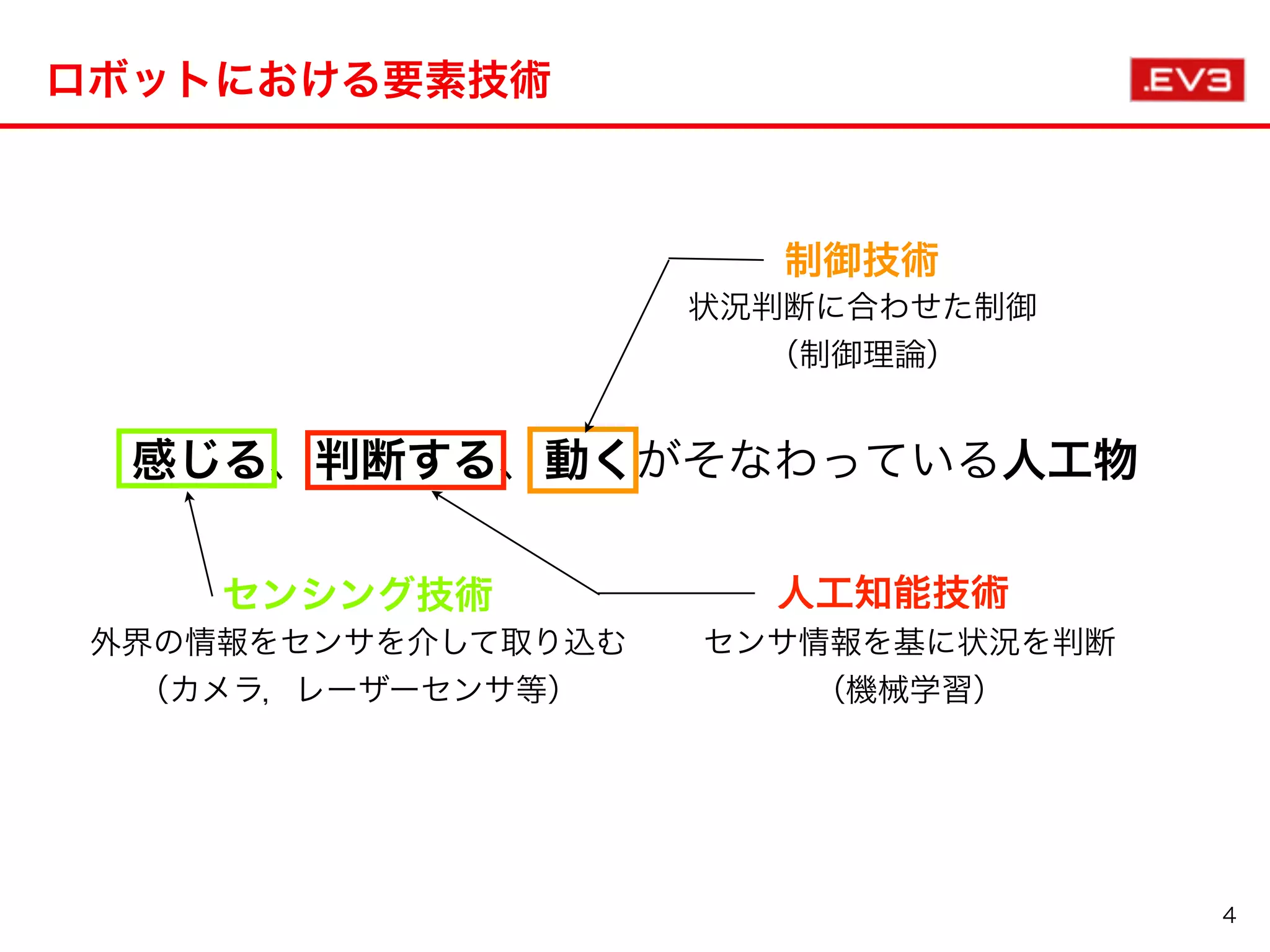
ロボットにおける要素技術 4 感じる、判断する、動くがそなわっている人工物 センシング技術 外界の情報をセンサを介して取り込む (カメラ,レーザーセンサ等) 人工知能技術 センサ情報を基に状況を判断 (機械学習) 制御技術 状況判断に合わせた制御 (制御理論)
5.
■ LEGO Mindstormsについて 5
6.
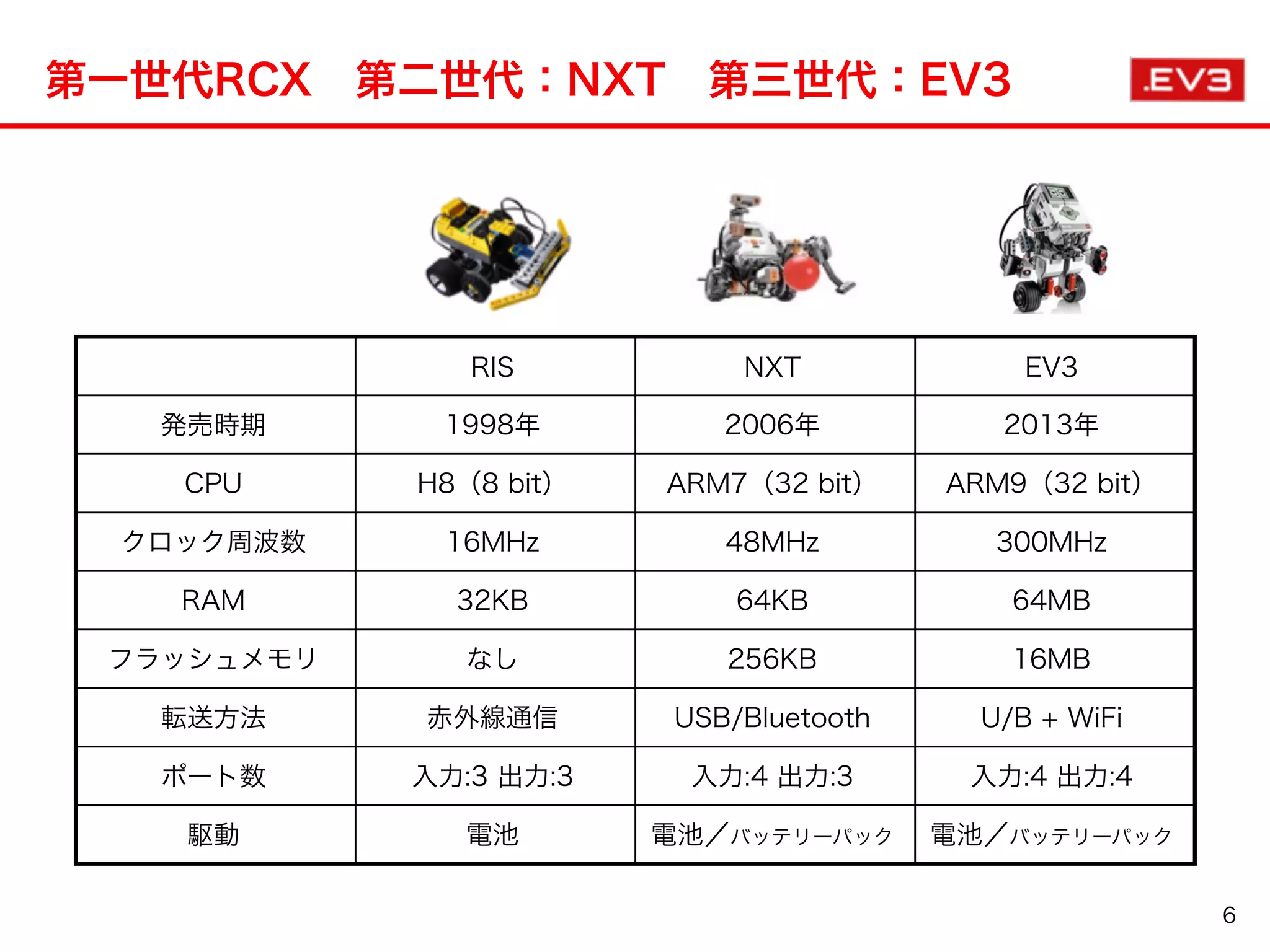
RIS NXT EV3 発売時期
1998年 2006年 2013年 CPU H8(8 bit) ARM7(32 bit) ARM9(32 bit) クロック周波数 16MHz 48MHz 300MHz RAM 32KB 64KB 64MB フラッシュメモリ なし 256KB 16MB 転送方法 赤外線通信 USB/Bluetooth U/B + WiFi ポート数 入力:3 出力:3 入力:4 出力:3 入力:4 出力:4 駆動 電池 電池/バッテリーパック 電池/バッテリーパック 第一世代RCX 第二世代:NXT 第三世代:EV3 6
7.
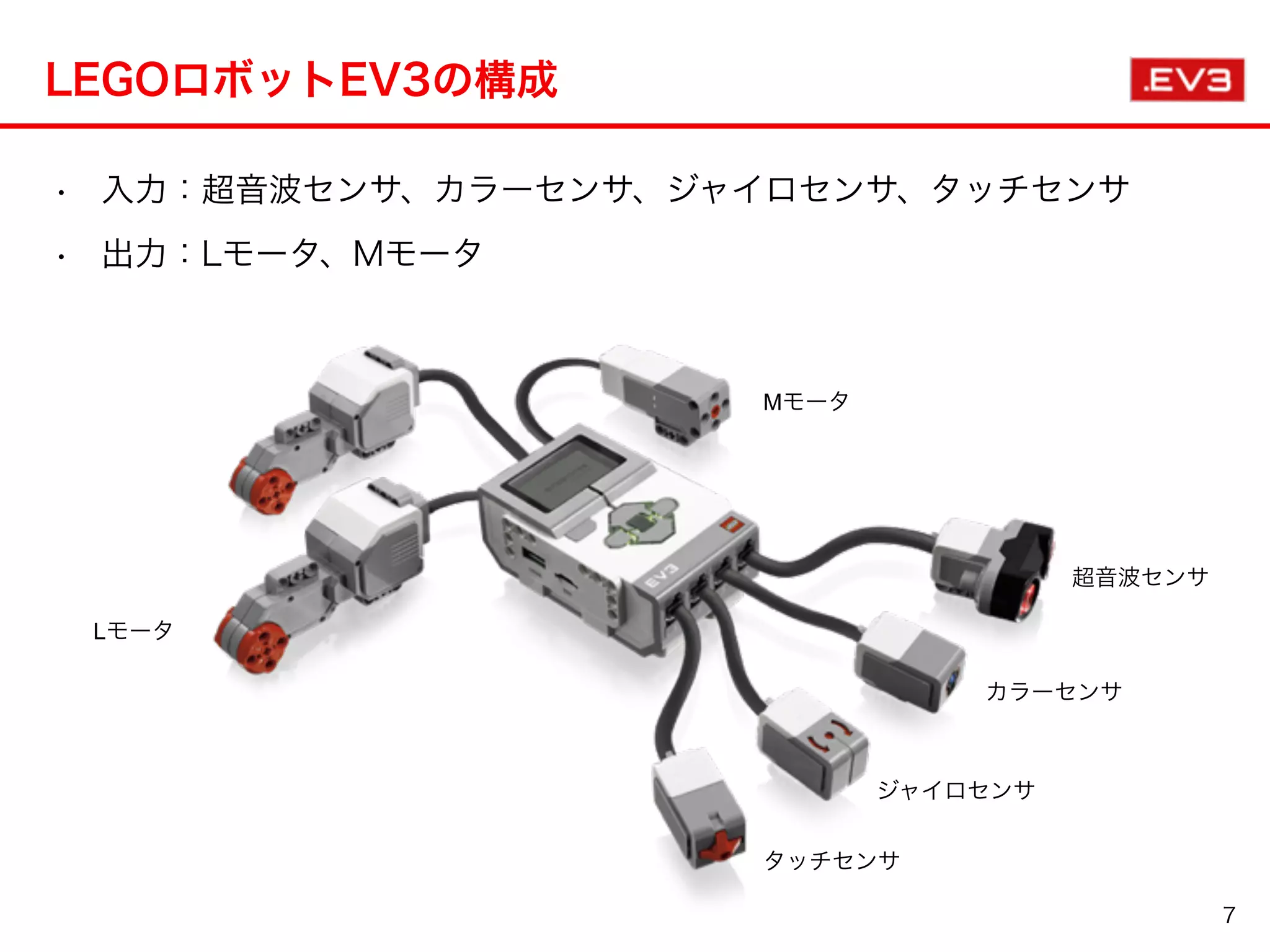
LEGOロボットEV3の構成 • 入力:超音波センサ、カラーセンサ、ジャイロセンサ、タッチセンサ •
出力:Lモータ、Mモータ 超音波センサ カラーセンサ ジャイロセンサ タッチセンサ Mモータ Lモータ 7
8.
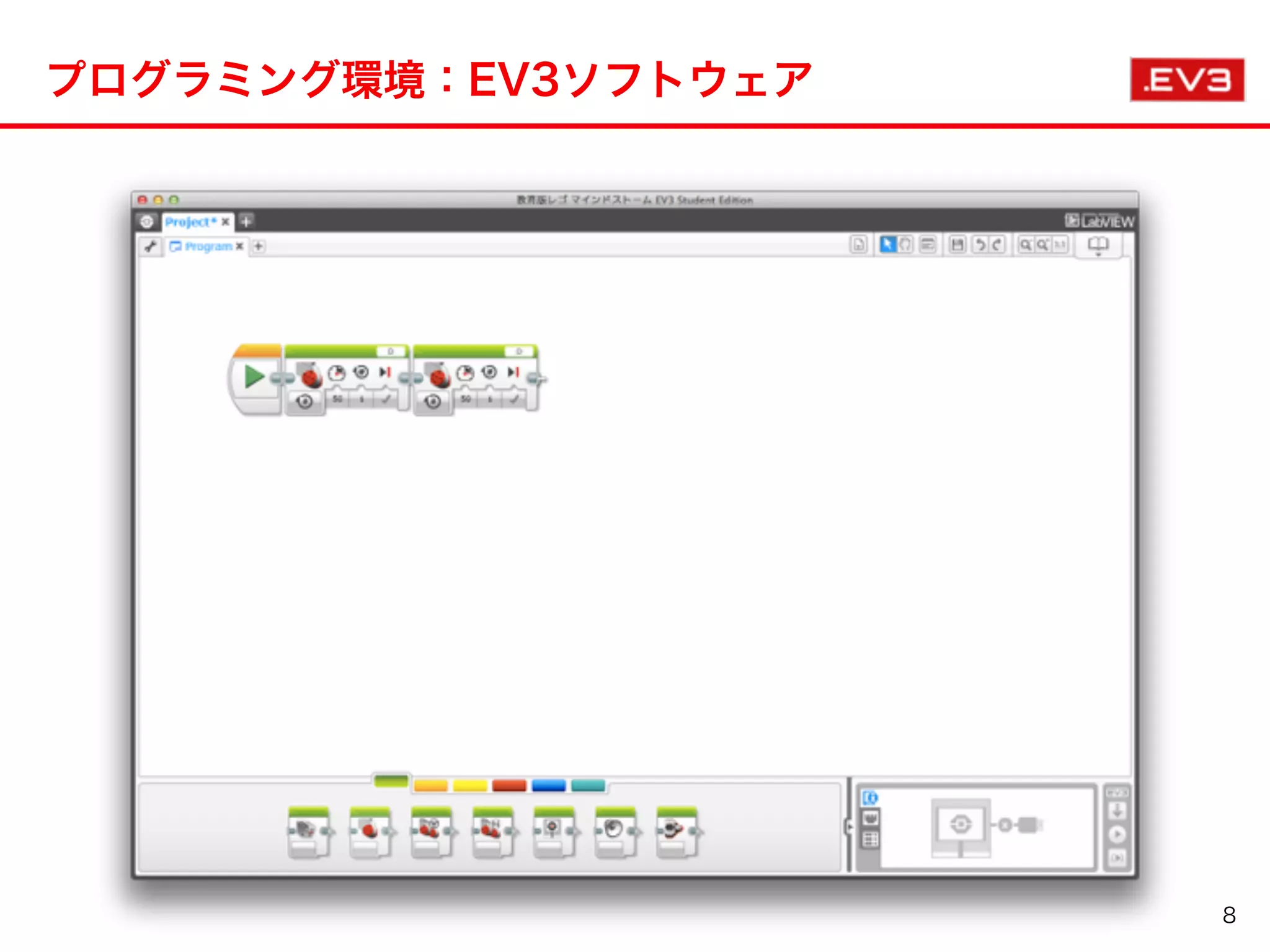
プログラミング環境:EV3ソフトウェア 8
9.
■ロボットの組み立て 9
10.
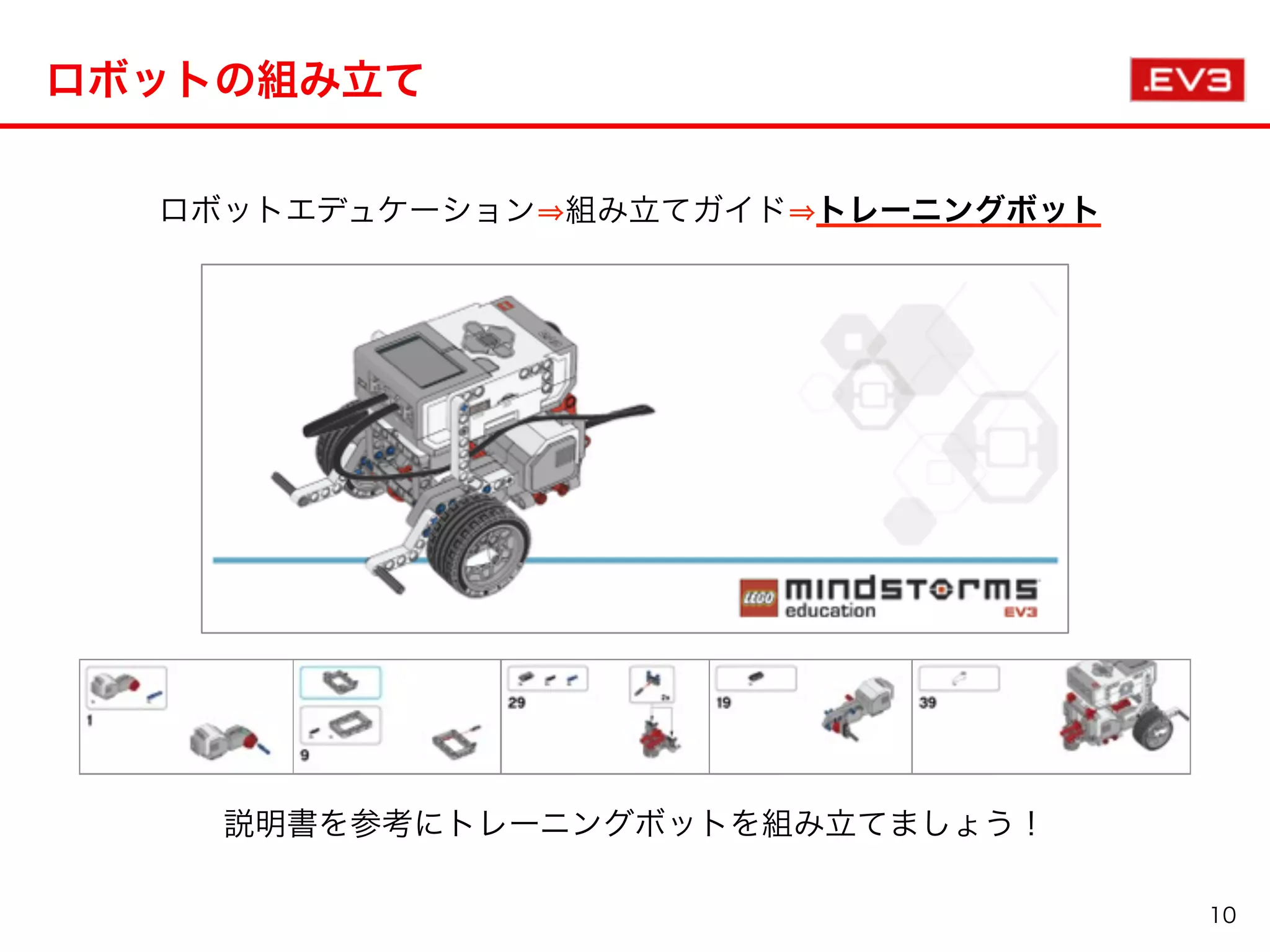
ロボットの組み立て ロボットエデュケーション 組み立てガイド トレーニングボット 説明書を参考にトレーニングボットを組み立てましょう! 10
11.
■プログラムを作成するには 11
12.
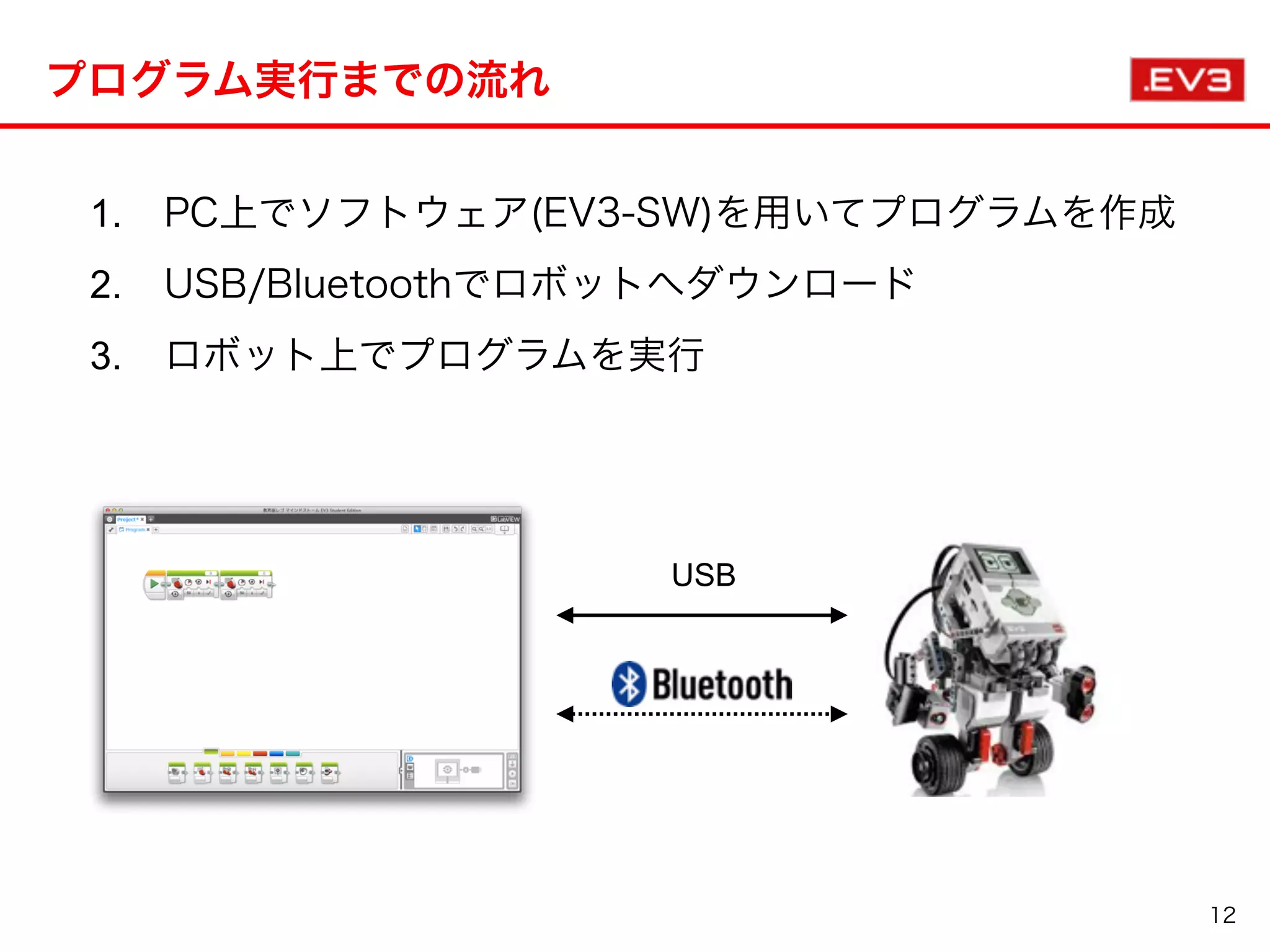
1. PC上でソフトウェア(EV3-SW)を用いてプログラムを作成 2. USB/Bluetoothでロボットへダウンロード 3.
ロボット上でプログラムを実行 プログラム実行までの流れ USB 12
13.
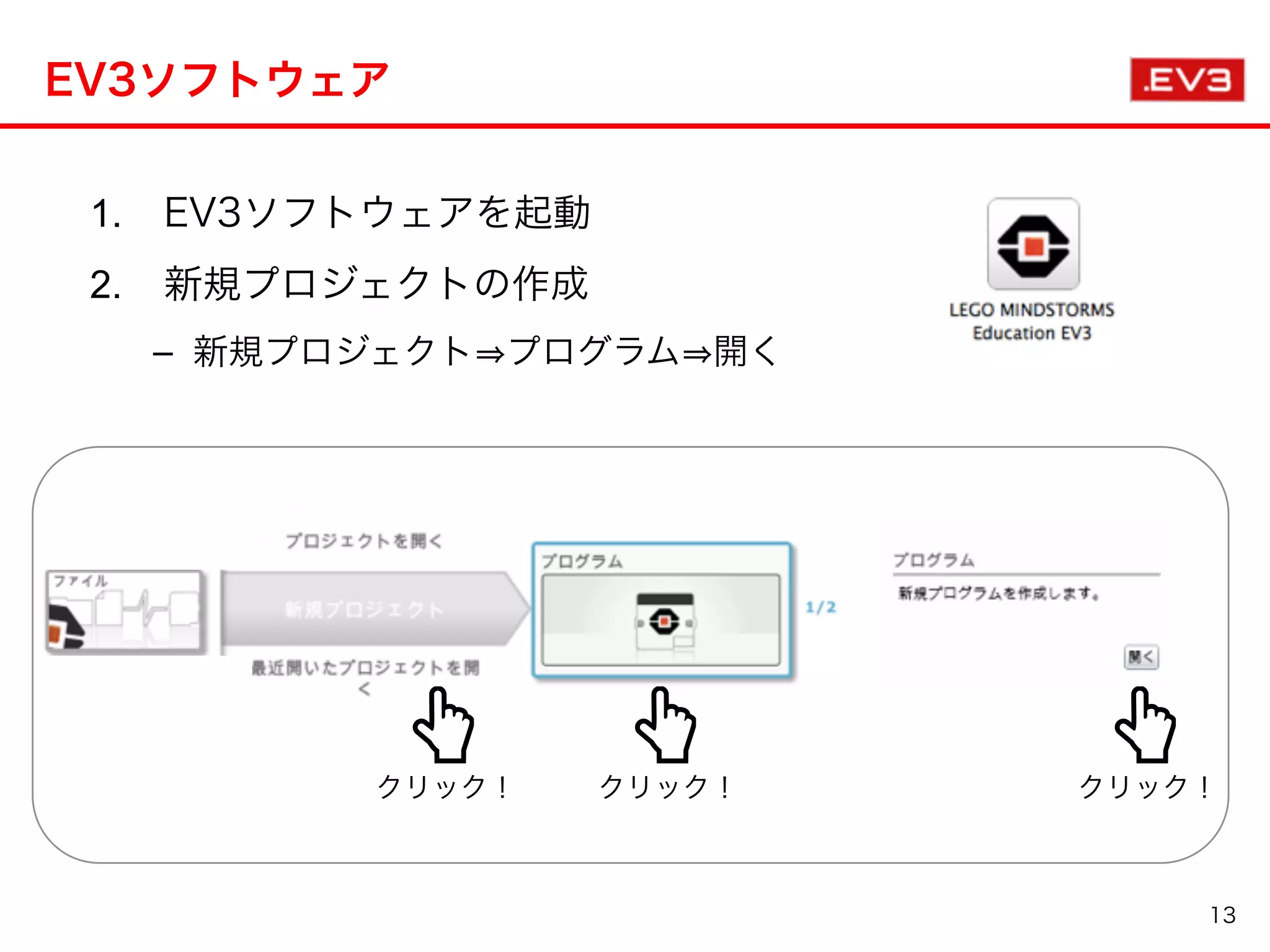
EV3ソフトウェア 1. EV3ソフトウェアを起動 2. 新規プロジェクトの作成 –
新規プロジェクト プログラム 開く クリック! クリック! クリック! 13
14.
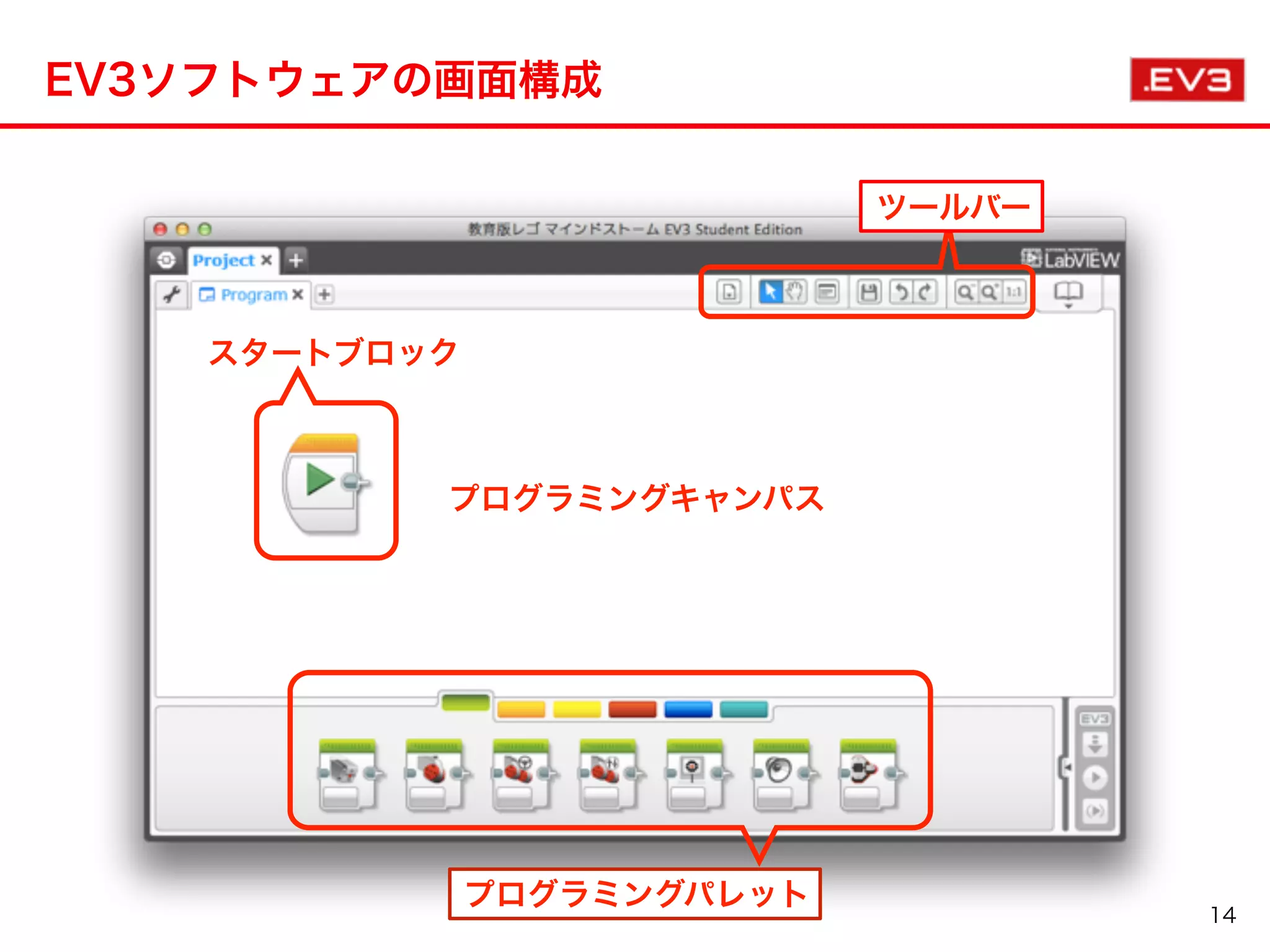
プログラミングパレット プログラミングキャンパス スタートブロック ツールバー EV3ソフトウェアの画面構成 14
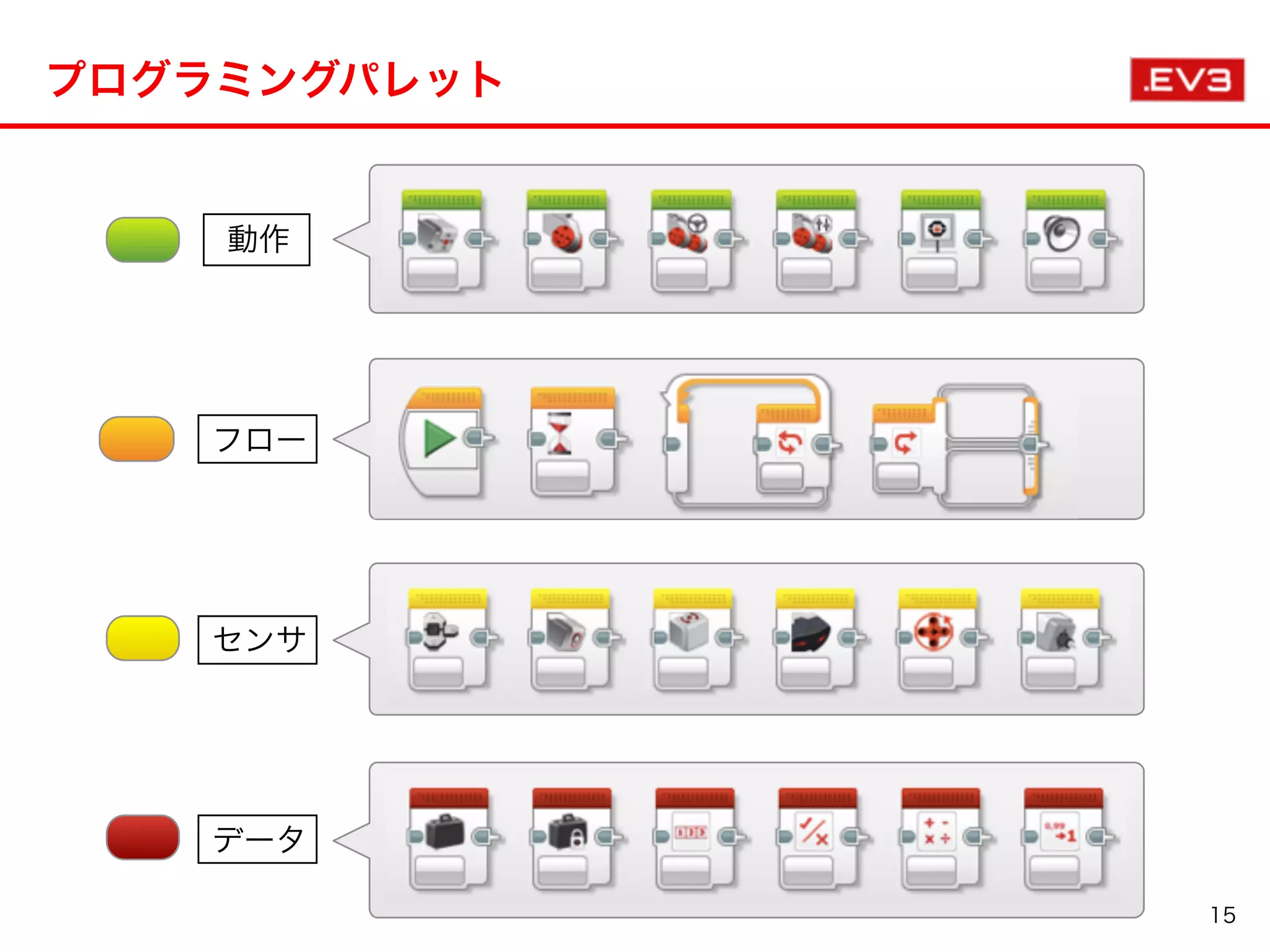
15.
プログラミングパレット 動作 フロー センサ データ 15
16.
■音をならしてみよう 16
17.
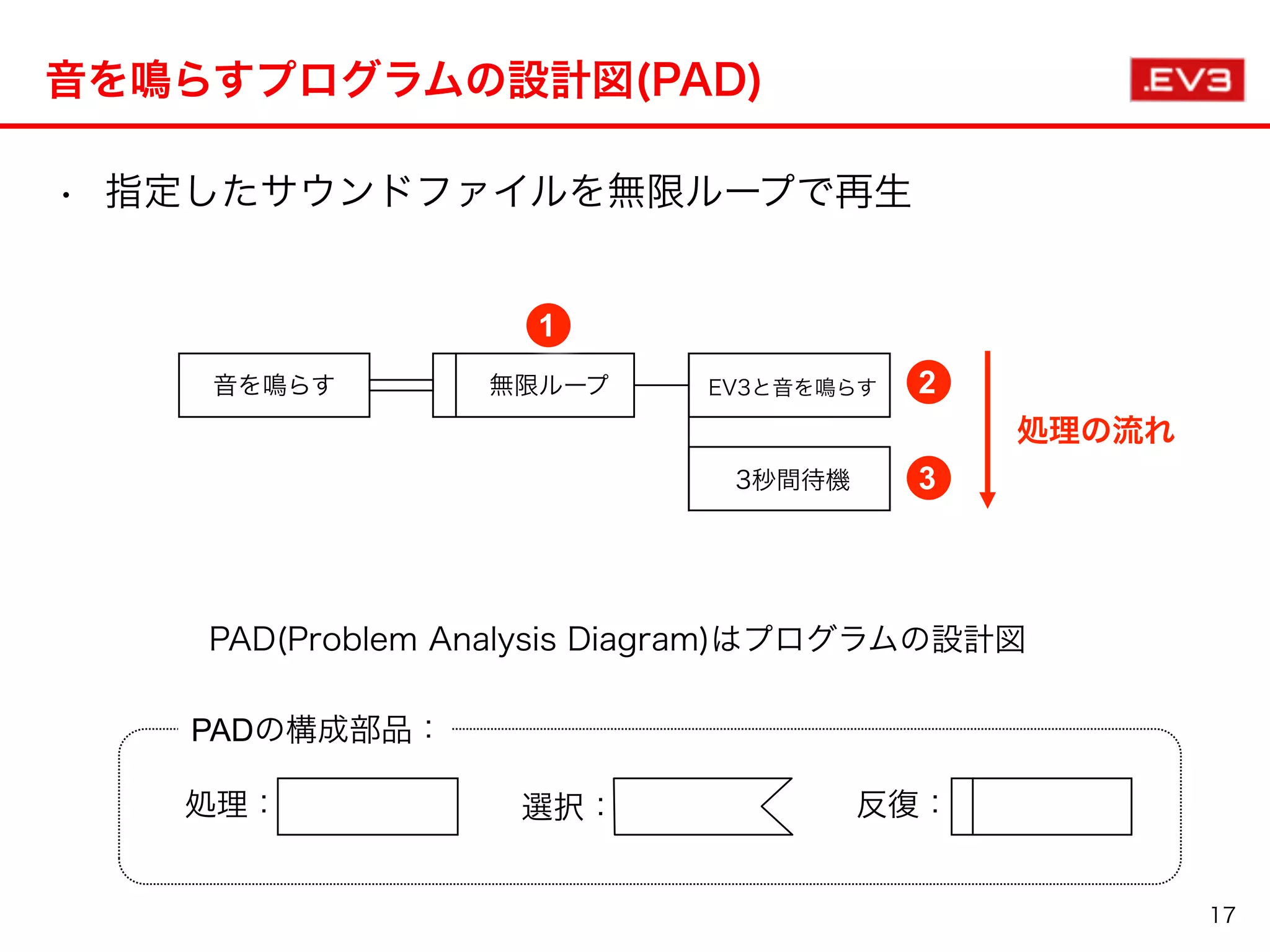
音を鳴らすプログラムの設計図(PAD) 17 処理の流れ 音を鳴らす EV3と音を鳴らす 3秒間待機 無限ループ 1 2 3 反復:処理: 選択: PADの構成部品: •
指定したサウンドファイルを無限ループで再生 PAD(Problem Analysis Diagram)はプログラムの設計図
18.
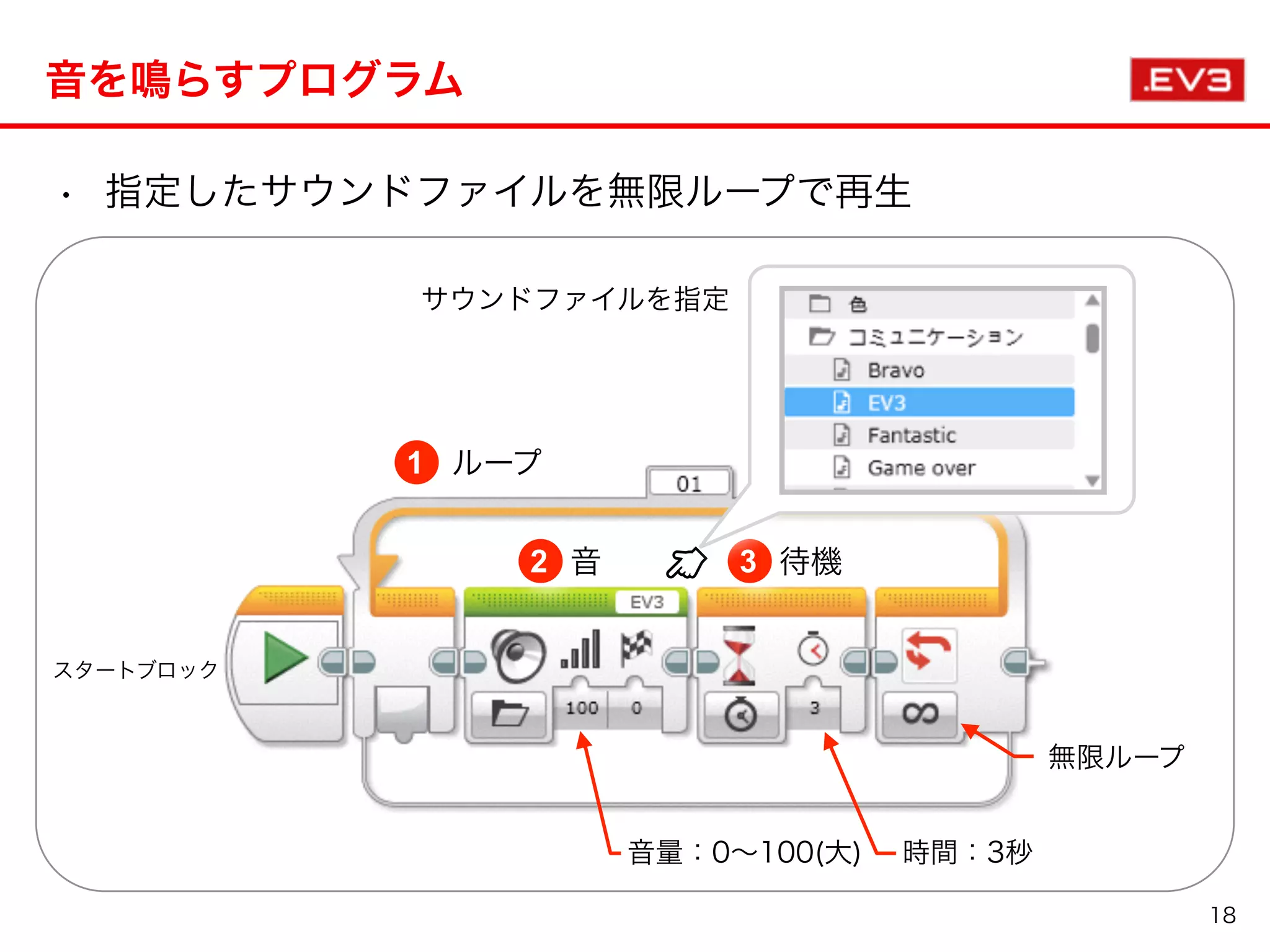
1 2 ループ 音 音量:0∼100(大) 無限ループ 3 待機 時間:3秒 • 指定したサウンドファイルを無限ループで再生 音を鳴らすプログラム サウンドファイルを指定 18 スタートブロック
19.
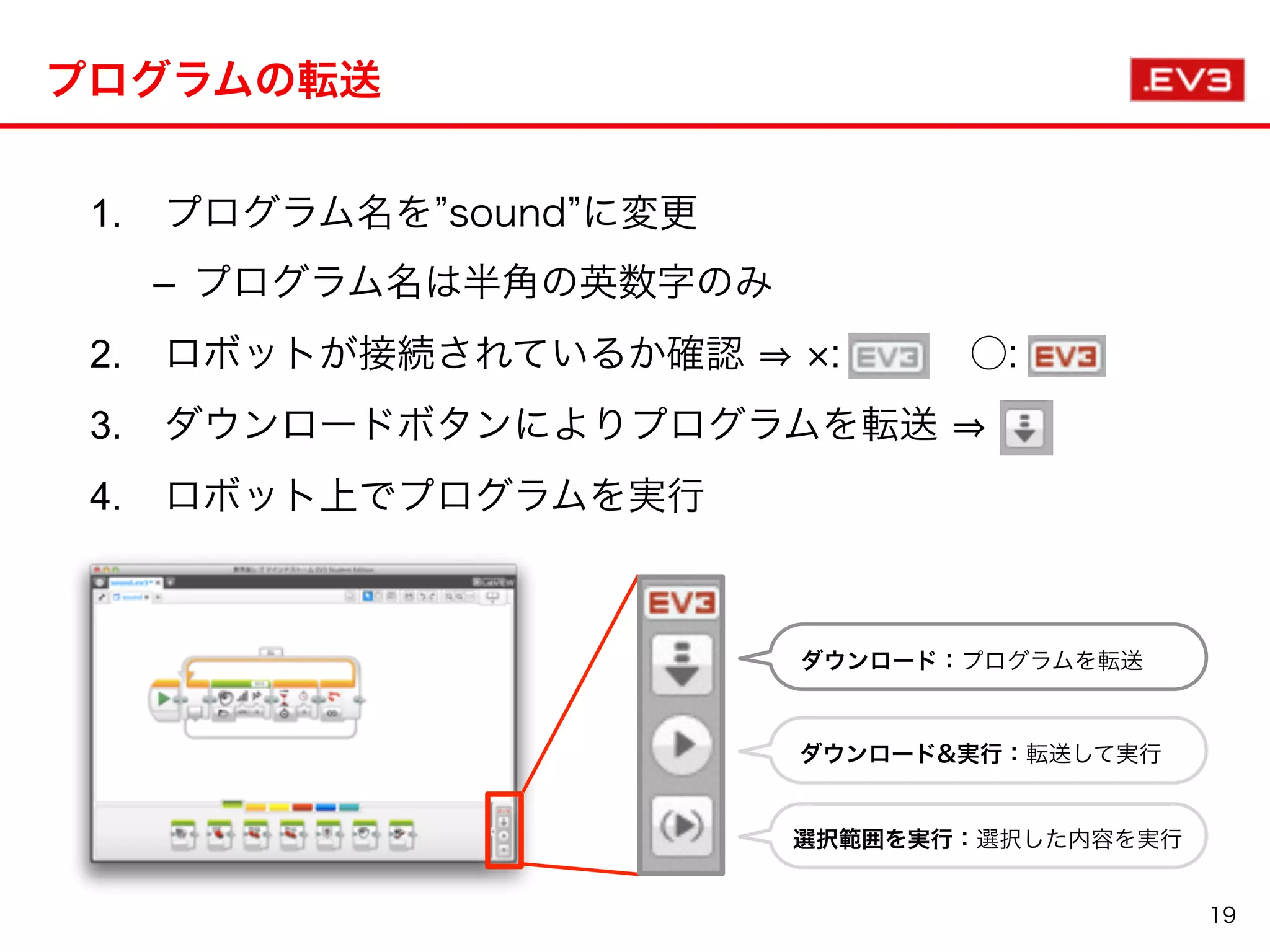
1. プログラム名を sound
に変更 – プログラム名は半角の英数字のみ 2. ロボットが接続されているか確認 : ○: 3. ダウンロードボタンによりプログラムを転送 4. ロボット上でプログラムを実行 19 プログラムの転送 ダウンロード:プログラムを転送 ダウンロード&実行:転送して実行 選択範囲を実行:選択した内容を実行
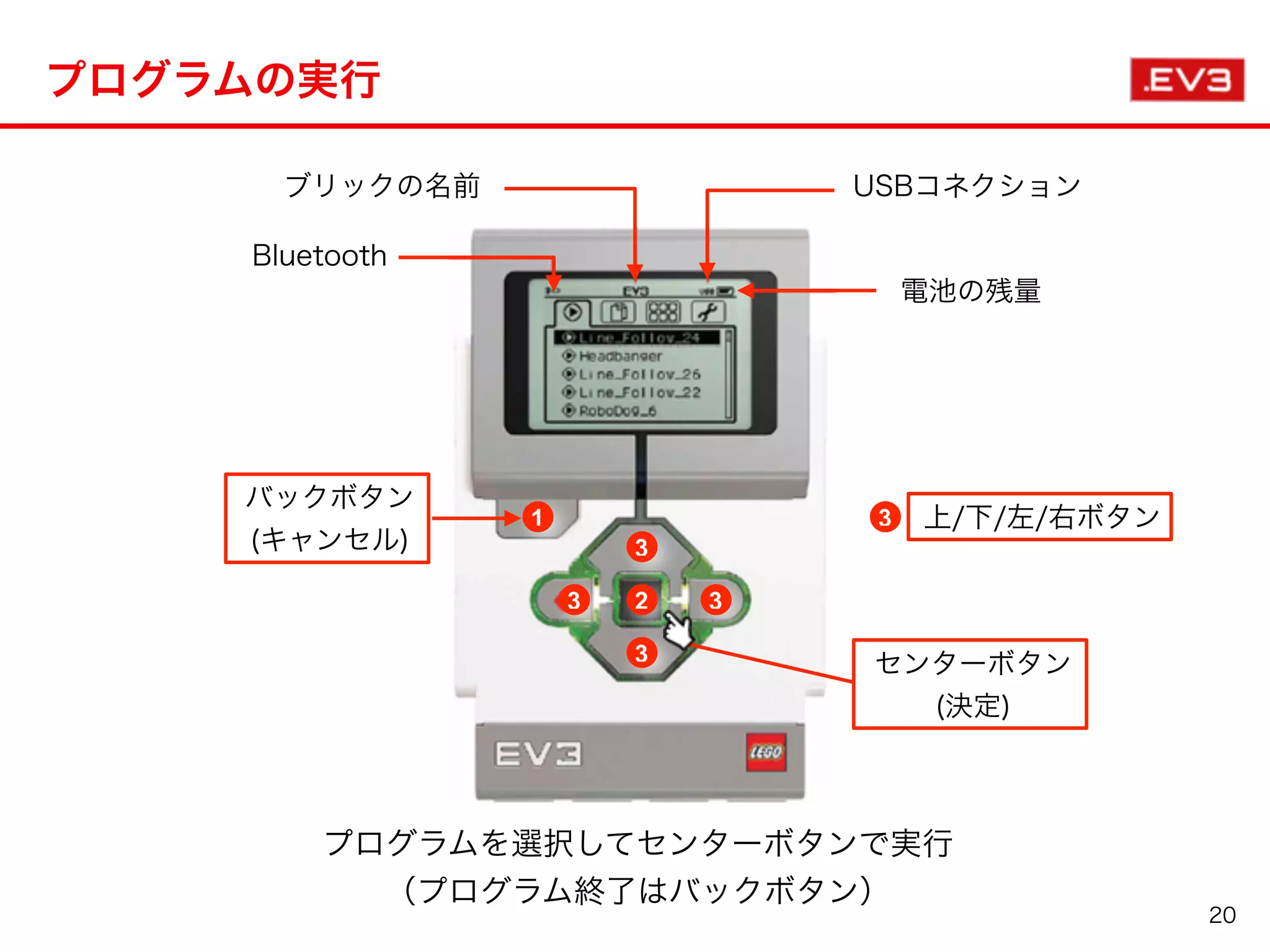
20.
プログラムの実行 20 電池の残量 USBコネクション Bluetooth ブリックの名前 1 3 323 3 バックボタン (キャンセル) センターボタン (決定) 3 上/下/左/右ボタン プログラムを選択してセンターボタンで実行 (プログラム終了はバックボタン)
21.
プログラムの実行 • 実行前にすべきこと ‒ ケーブルを外して、安全確認 ‒
プログラムのアルゴリズムを頭の中で実行 • 実行時の注意 ‒ ロボットの動作をよく観察し、設計図(PAD)通りにアルゴリズム が実現できているかを確認 ‒ ロボットが思い通りに動かないときは、ロボットがどこまで設計 図通りに動いたかを調べ、プログラムを修正(デバッグ)する 21
22.
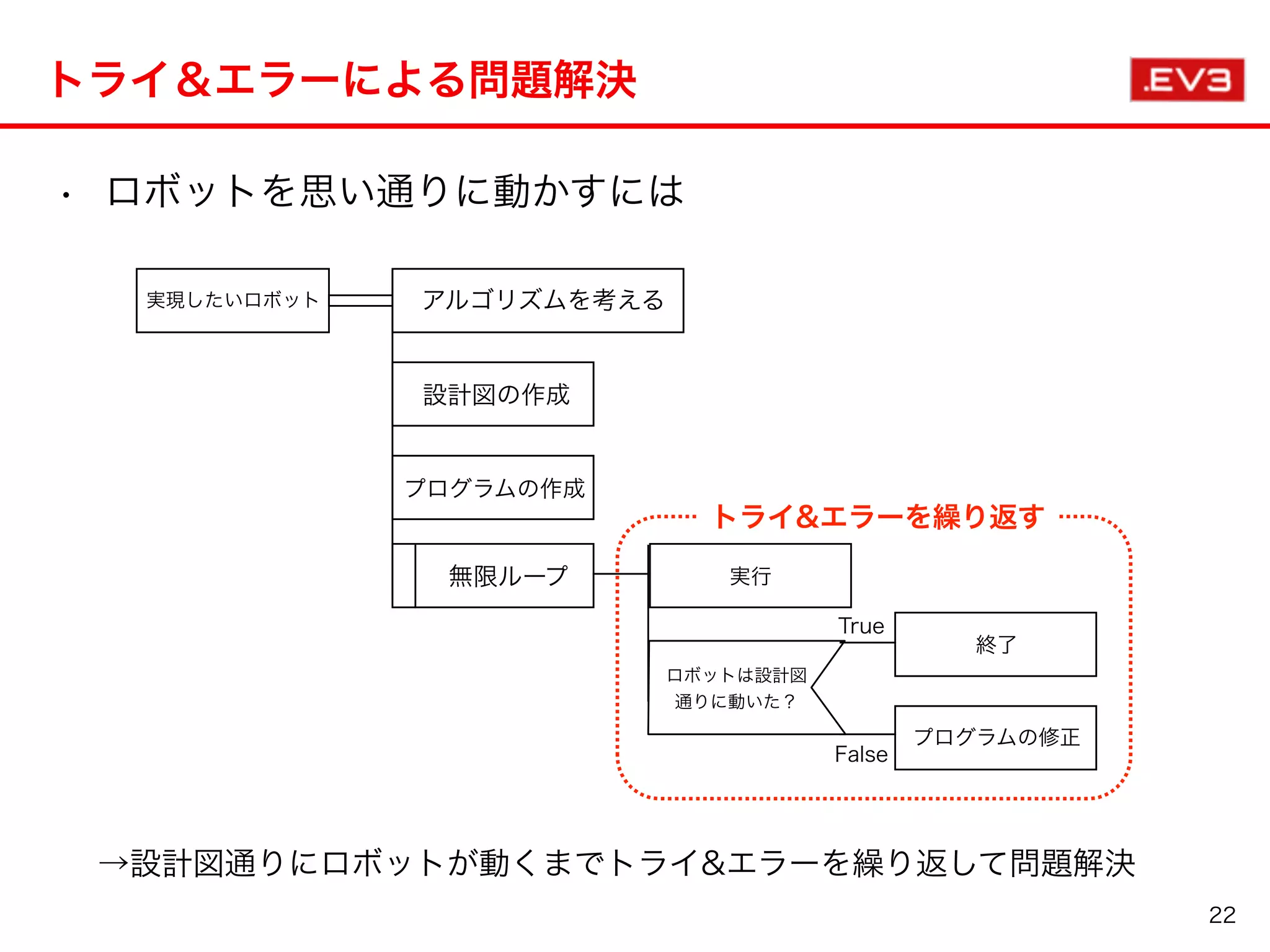
トライ&エラーによる問題解決 22 実現したいロボット アルゴリズムを考える 設計図の作成 無限ループ 実行 ロボットは設計図 通りに動いた? プログラムの作成 終了 プログラムの修正 True False トライ&エラーを繰り返す •
ロボットを思い通りに動かすには →設計図通りにロボットが動くまでトライ&エラーを繰り返して問題解決
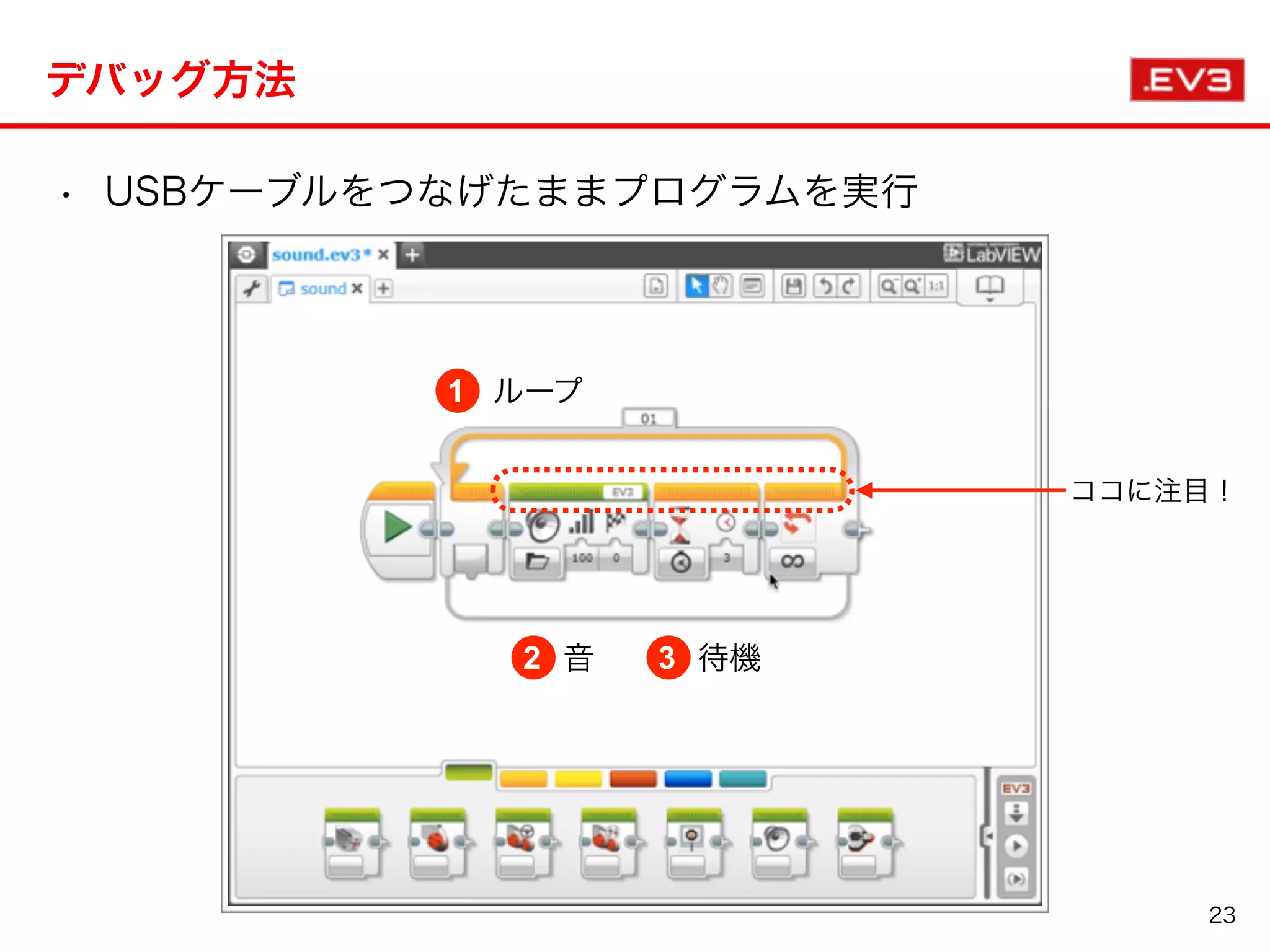
23.
23 • USBケーブルをつなげたままプログラムを実行 デバッグ方法 ココに注目! 1 ループ 2
音 3 待機
24.
ロボットにおける要素技術 24 感じる、判断する、動くがそなわっている人工物 ■ロボットを前進させるには(モータ制御1) ■ロボットを回転させるには(モータ制御2) ■演算と変数
25.
■ロボットを前進させるには(モータ制御1) 25
26.
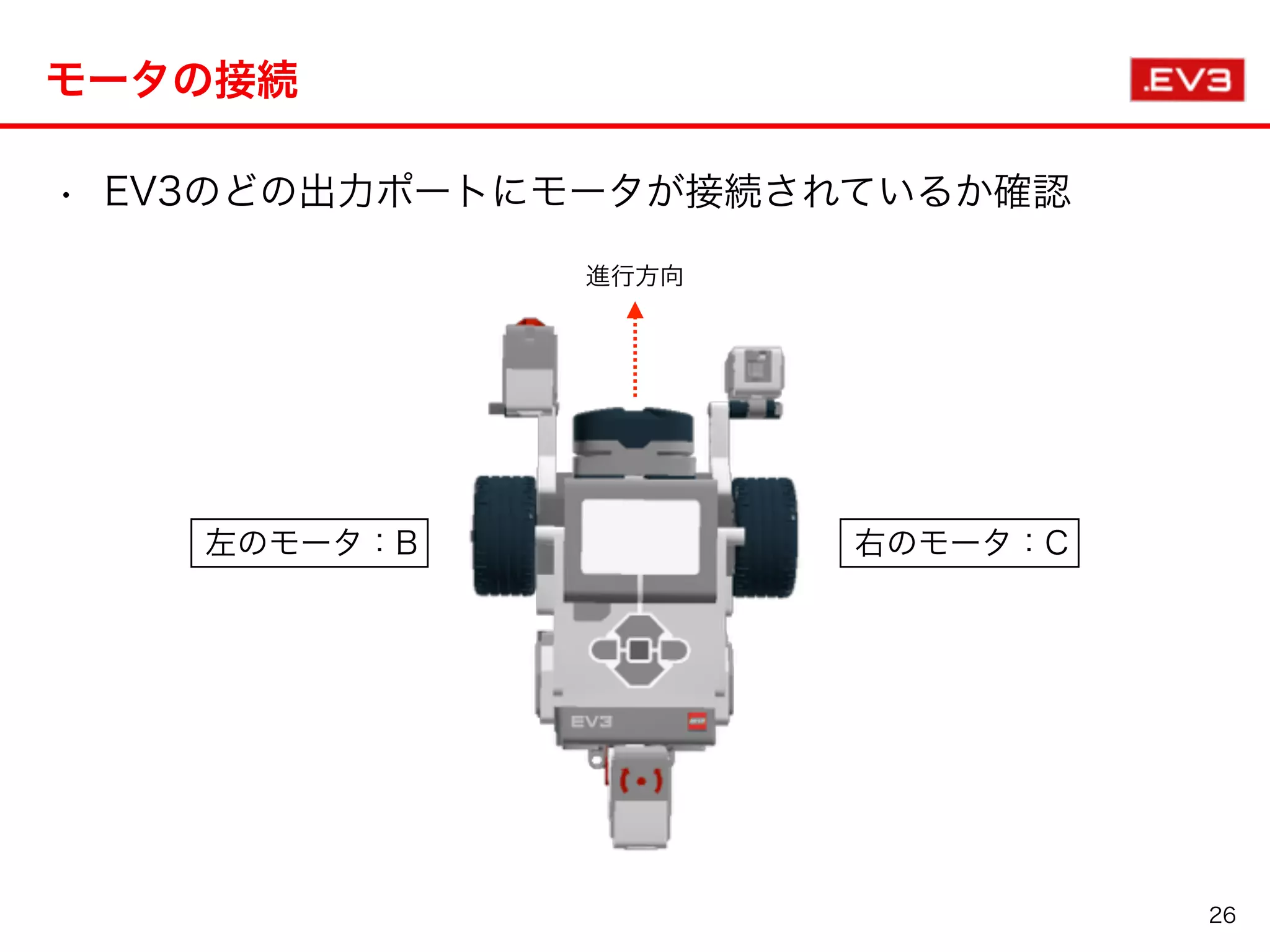
モータの接続 • EV3のどの出力ポートにモータが接続されているか確認 26 左のモータ:B 右のモータ:C 進行方向
27.
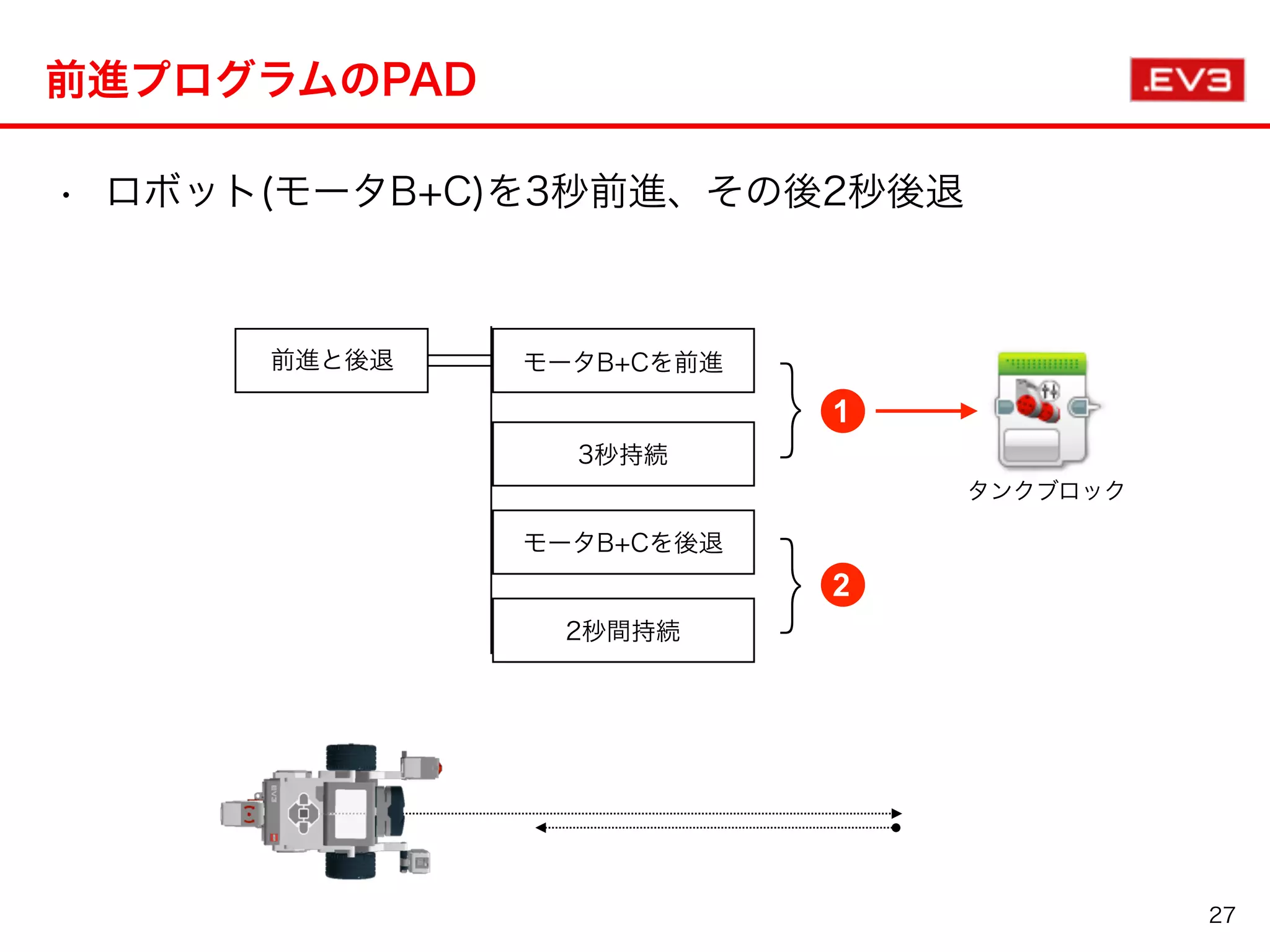
前進プログラムのPAD 27 • ロボット(モータB+C)を3秒前進、その後2秒後退 前進と後退 モータB+Cを前進 3秒持続 1 2 モータB+Cを後退 2秒間持続 } } タンクブロック
28.
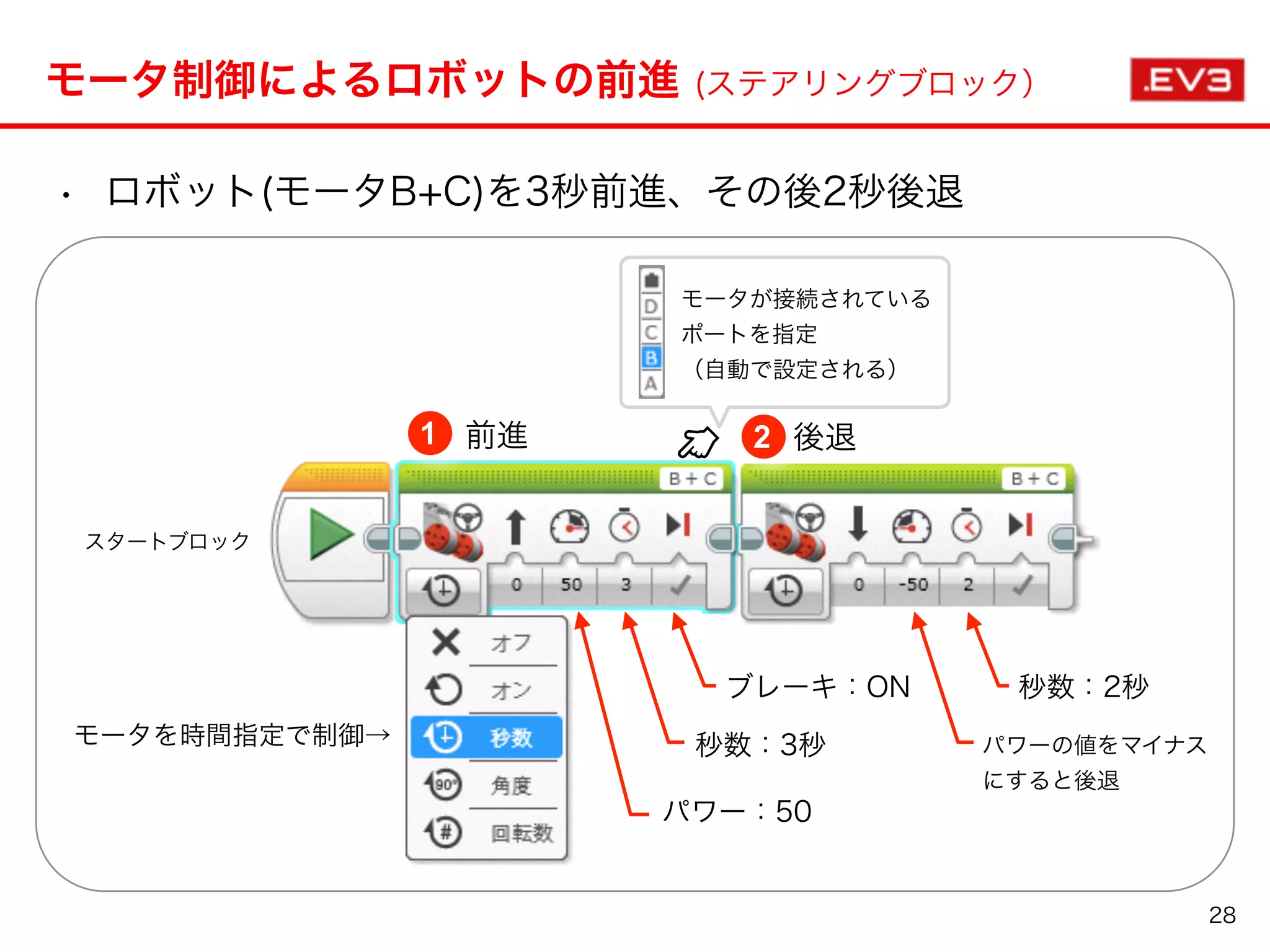
モータ制御によるロボットの前進 (ステアリングブロック) 28 • ロボット(モータB+C)を3秒前進、その後2秒後退 スタートブロック 1
2前進 後退 モータを時間指定で制御→ パワー:50 秒数:3秒 ブレーキ:ON モータが接続されている ポートを指定 (自動で設定される) パワーの値をマイナス にすると後退 秒数:2秒
29.
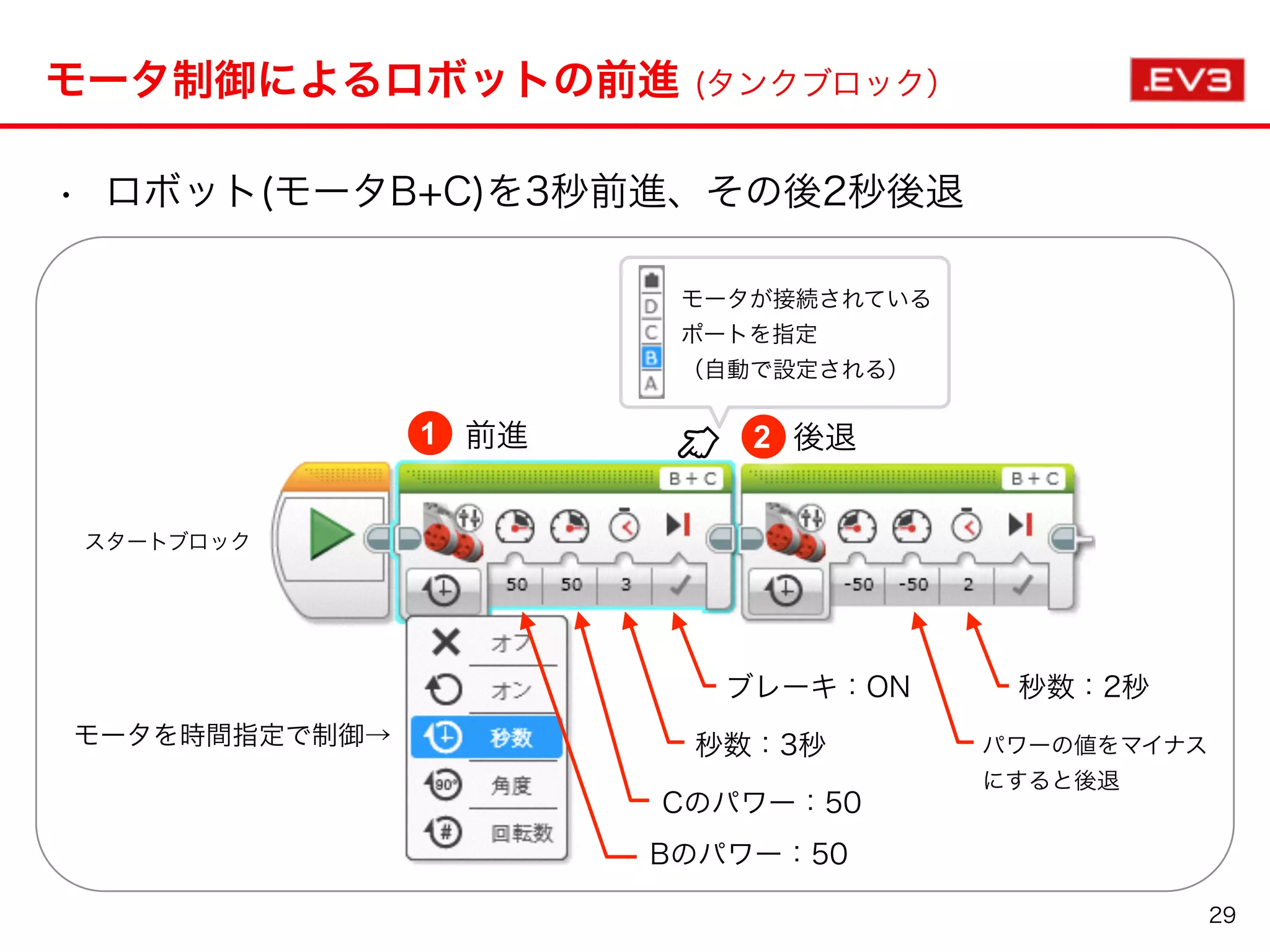
モータ制御によるロボットの前進 (タンクブロック) 29 • ロボット(モータB+C)を3秒前進、その後2秒後退 スタートブロック 1
2前進 後退 モータを時間指定で制御→ Cのパワー:50 秒数:3秒 ブレーキ:ON モータが接続されている ポートを指定 (自動で設定される) パワーの値をマイナス にすると後退 秒数:2秒 Bのパワー:50
30.
Lモータの原理 30 段数:7段 トルク比率:45:1 エンコーダの回転角:2度
31.
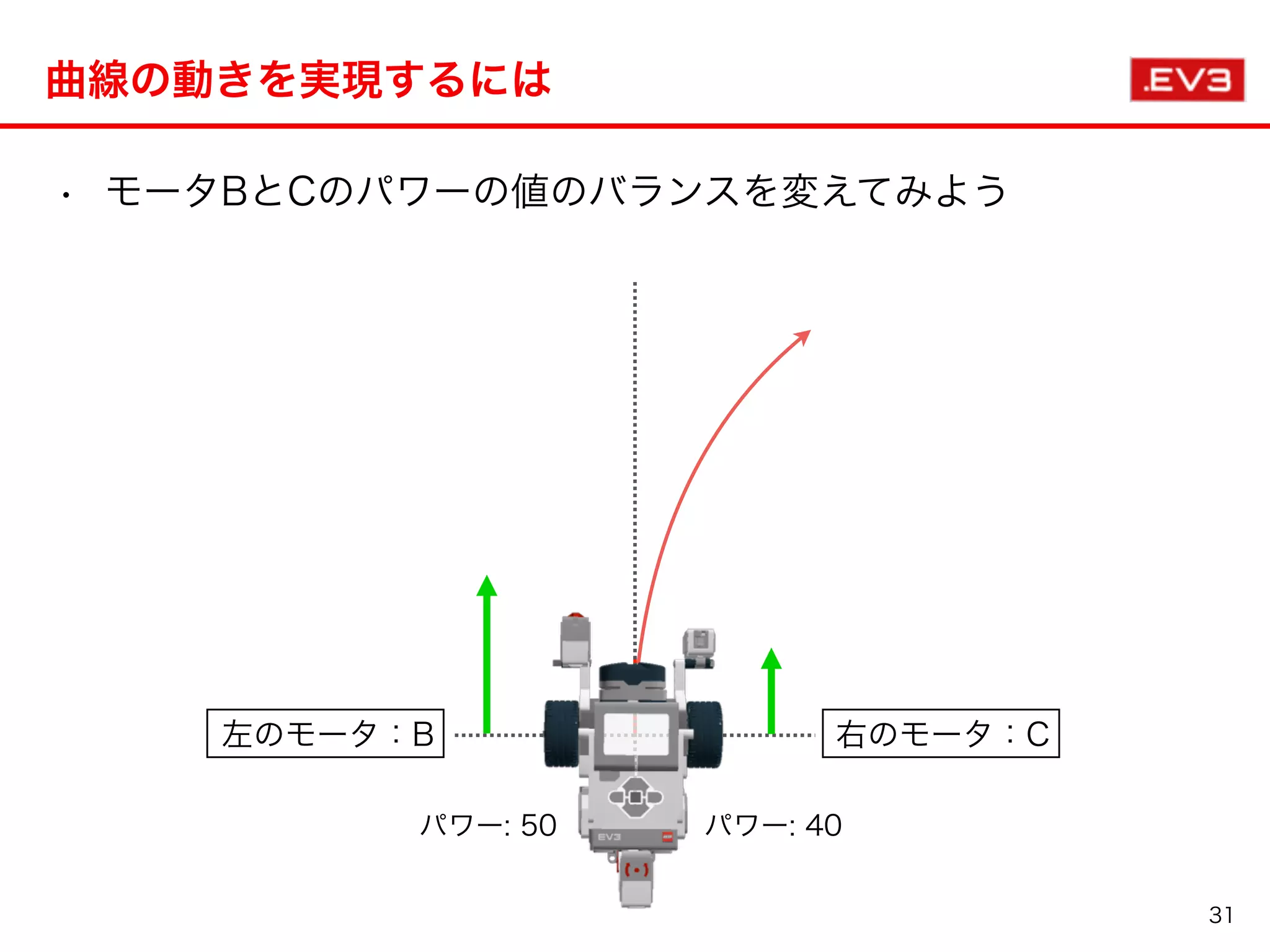
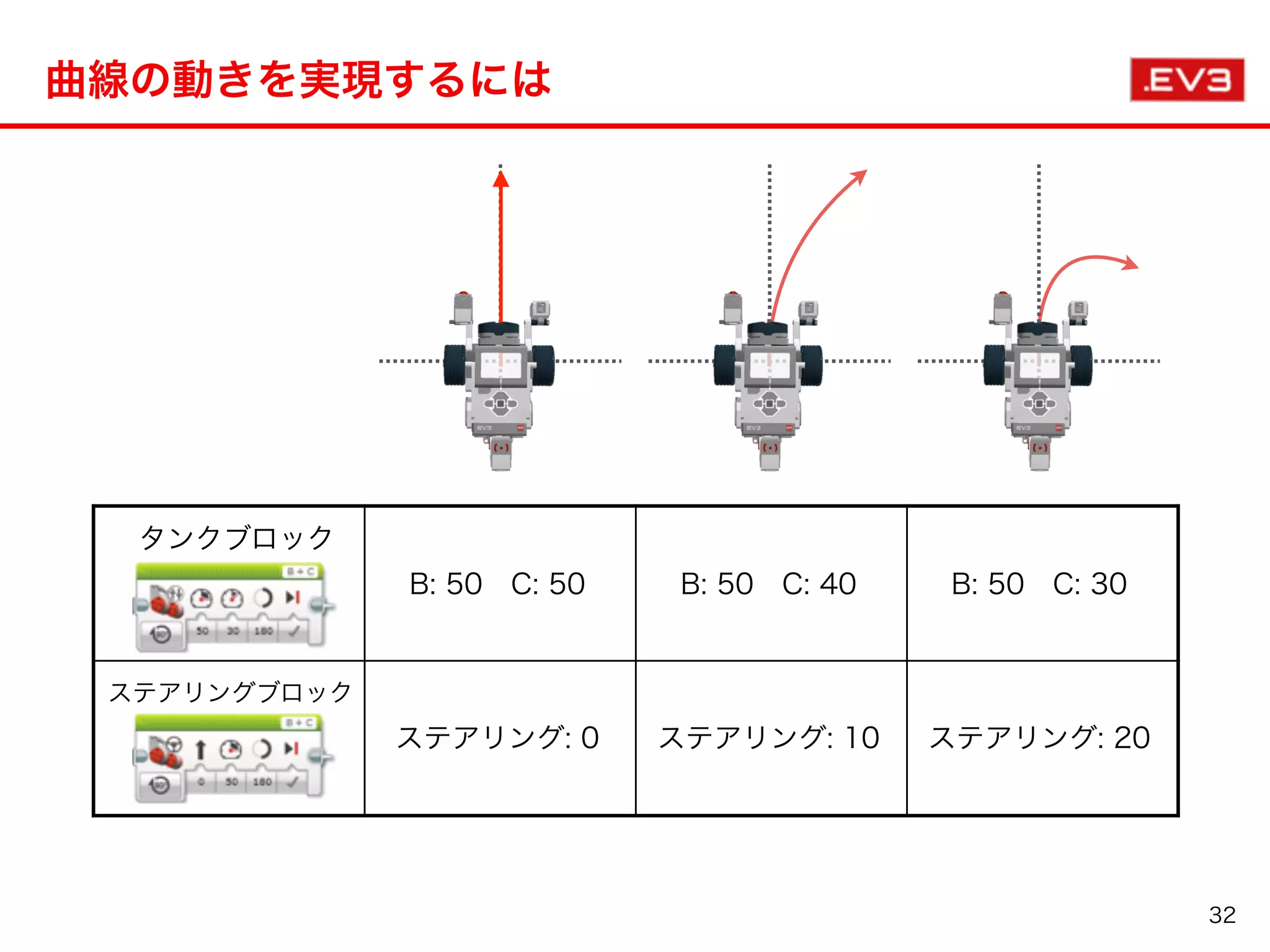
曲線の動きを実現するには 31 左のモータ:B 右のモータ:C • モータBとCのパワーの値のバランスを変えてみよう パワー:
50 パワー: 40
32.
B: 50 C: 50
B: 50 C: 40 B: 50 C: 30 ステアリング: 0 ステアリング: 10 ステアリング: 20 曲線の動きを実現するには 32 タンクブロック ステアリングブロック
33.
33 ■ロボットを回転させるには(モータ制御2)
34.
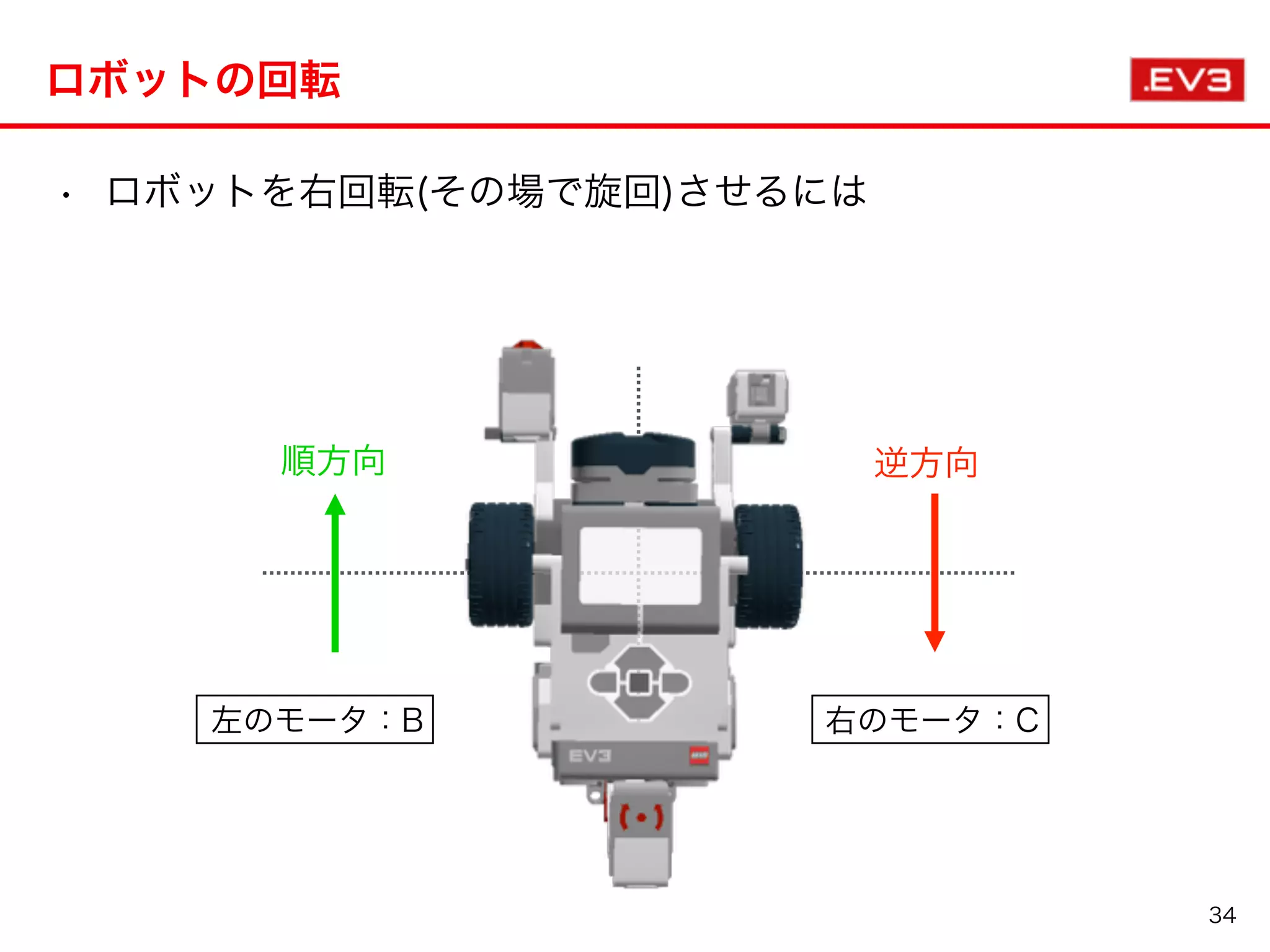
ロボットの回転 • ロボットを右回転(その場で旋回)させるには 逆方向順方向 34 左のモータ:B 右のモータ:C
35.
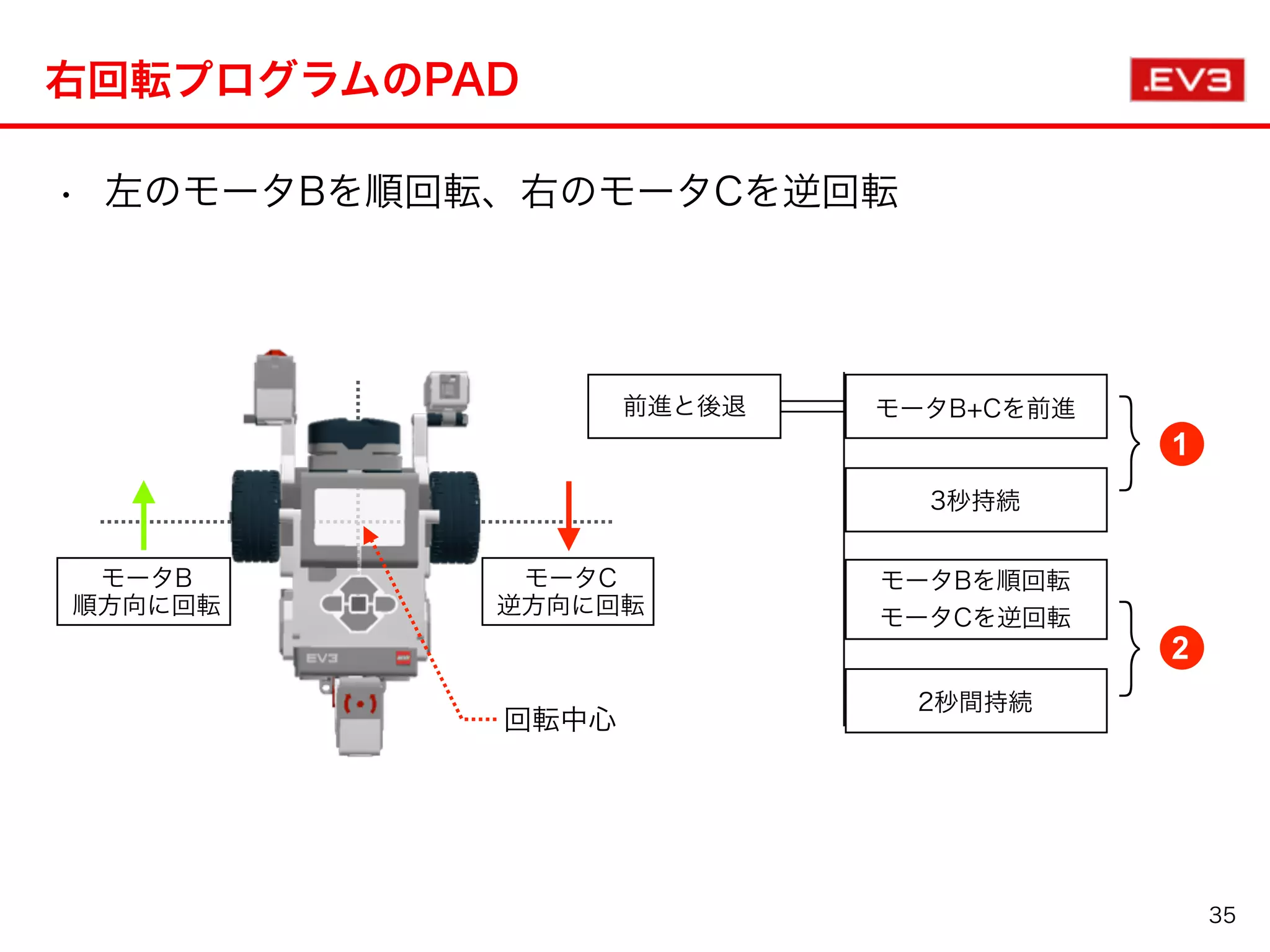
右回転プログラムのPAD • 左のモータBを順回転、右のモータCを逆回転 35 前進と後退 3秒持続 モータB+Cを前進 モータBを順回転 モータCを逆回転 2秒間持続 回転中心 モータB 順方向に回転 モータC 逆方向に回転 1 2 } }
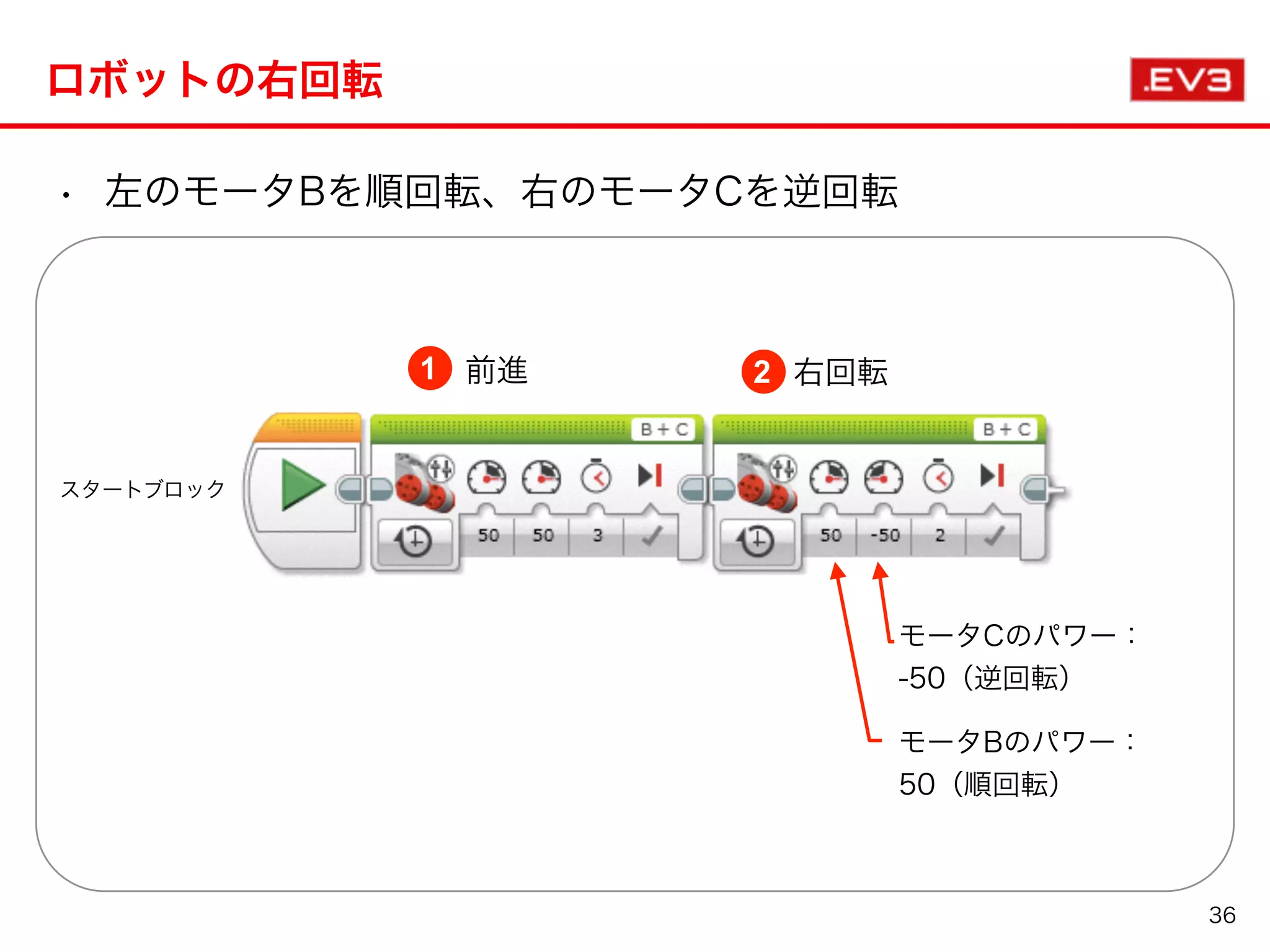
36.
ロボットの右回転 • 左のモータBを順回転、右のモータCを逆回転 36 スタートブロック 1 2前進
右回転 モータBのパワー: 50(順回転) モータCのパワー: -50(逆回転)
37.
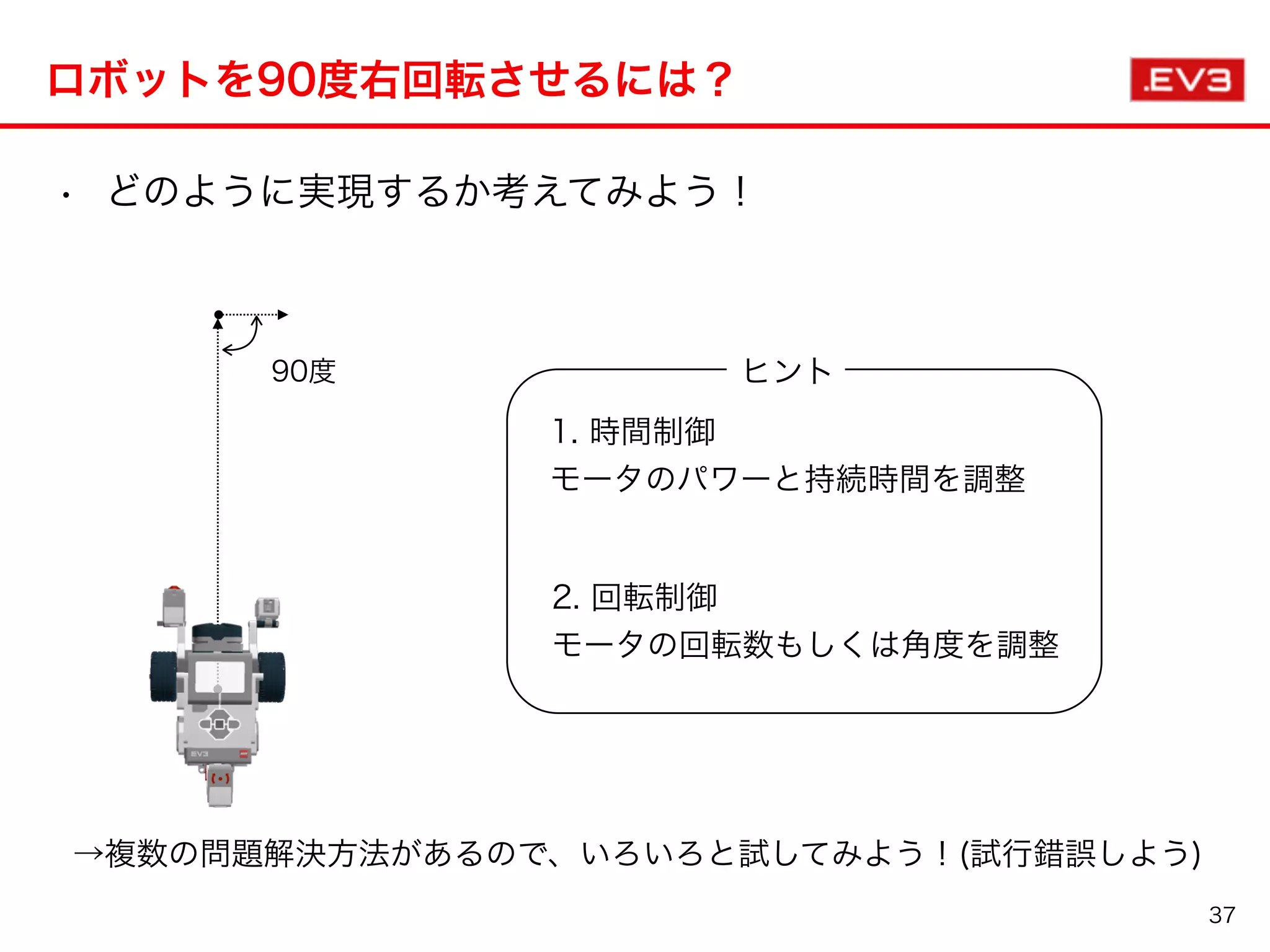
ロボットを90度右回転させるには? 37 90度 1. 時間制御 モータのパワーと持続時間を調整 • どのように実現するか考えてみよう! 2.
回転制御 モータの回転数もしくは角度を調整 →複数の問題解決方法があるので、いろいろと試してみよう!(試行錯誤しよう) ヒント
38.
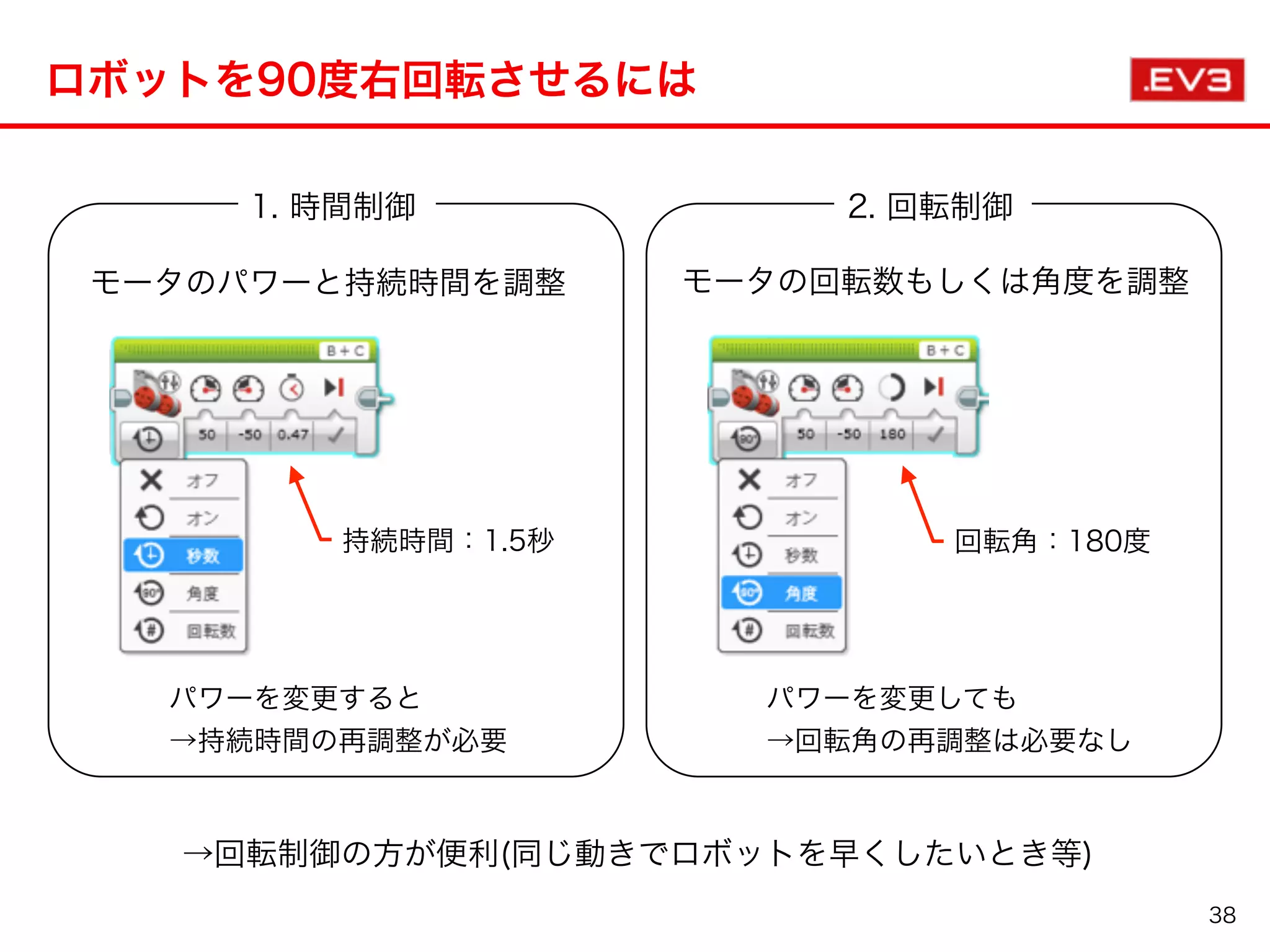
ロボットを90度右回転させるには 38 →回転制御の方が便利(同じ動きでロボットを早くしたいとき等) モータのパワーと持続時間を調整 1. 時間制御 持続時間:1.5秒 パワーを変更すると →持続時間の再調整が必要 モータの回転数もしくは角度を調整 2. 回転制御 回転角:180度 パワーを変更しても →回転角の再調整は必要なし
39.
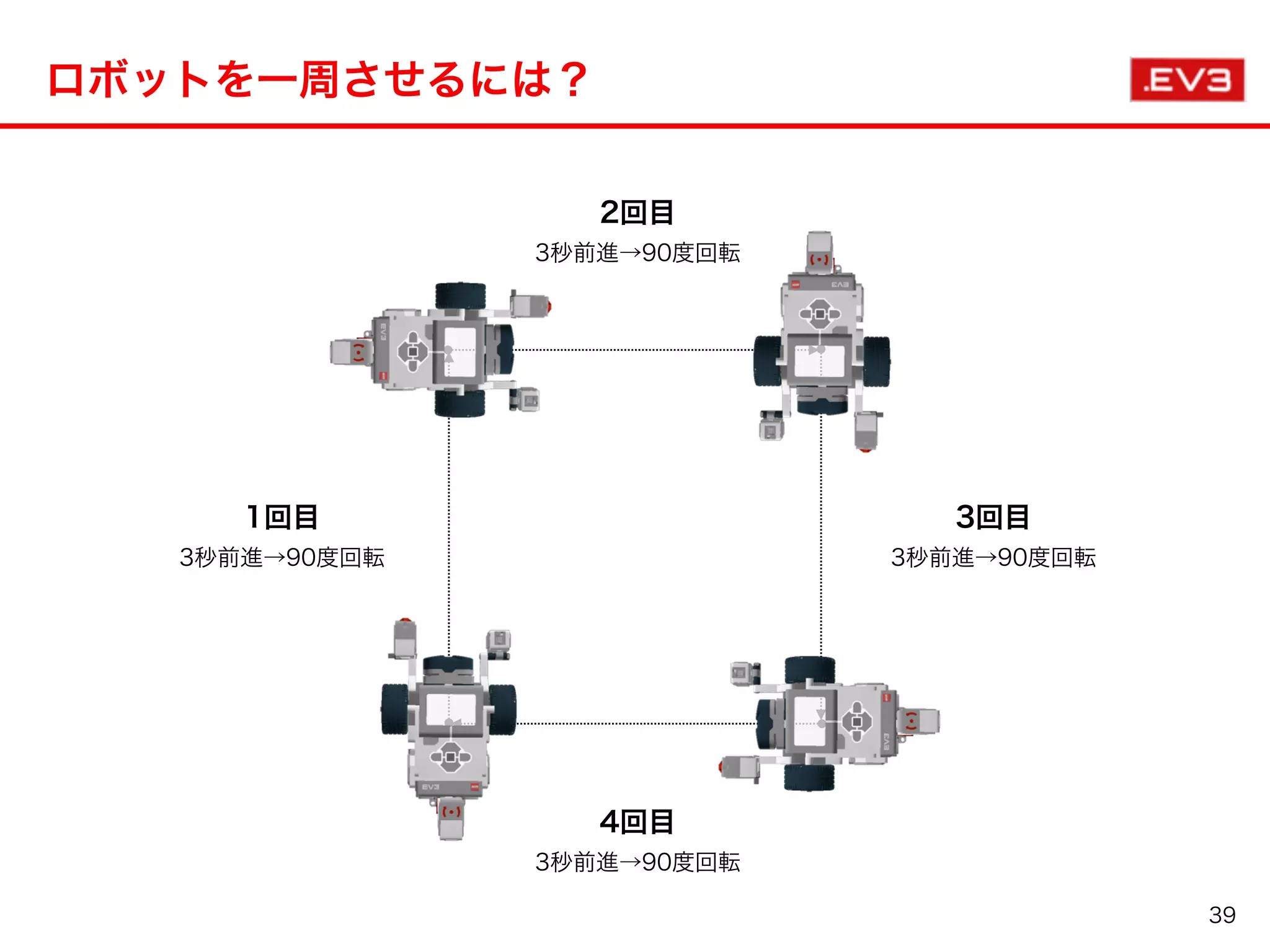
ロボットを一周させるには? 39 1回目 3秒前進→90度回転 3回目 3秒前進→90度回転 2回目 3秒前進→90度回転 4回目 3秒前進→90度回転
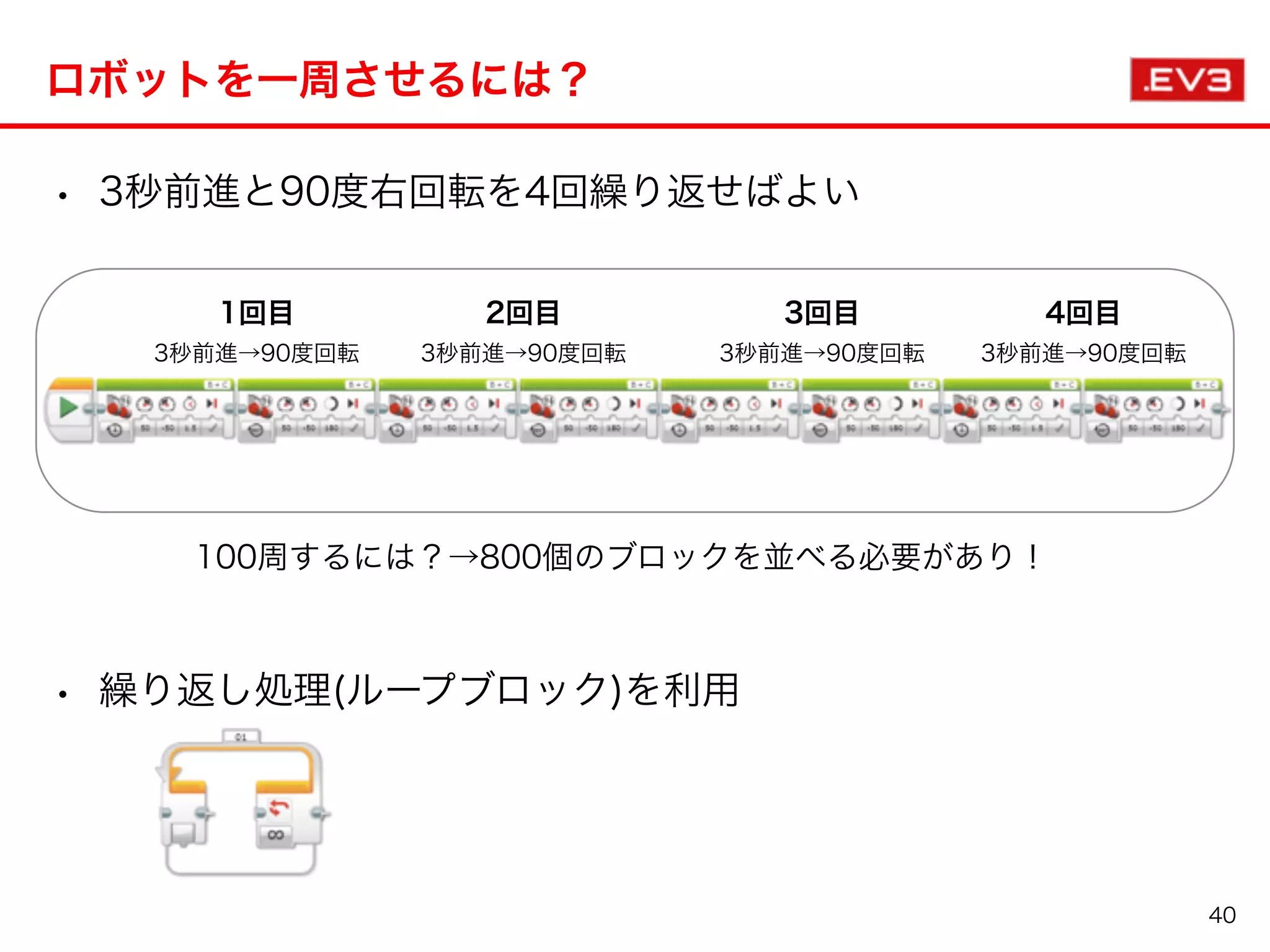
40.
• 3秒前進と90度右回転を4回繰り返せばよい • 繰り返し処理(ループブロック)を利用 ロボットを一周させるには? 40 1回目 3秒前進→90度回転 3回目 3秒前進→90度回転 2回目 3秒前進→90度回転 4回目 3秒前進→90度回転 100周するには?→800個のブロックを並べる必要があり!
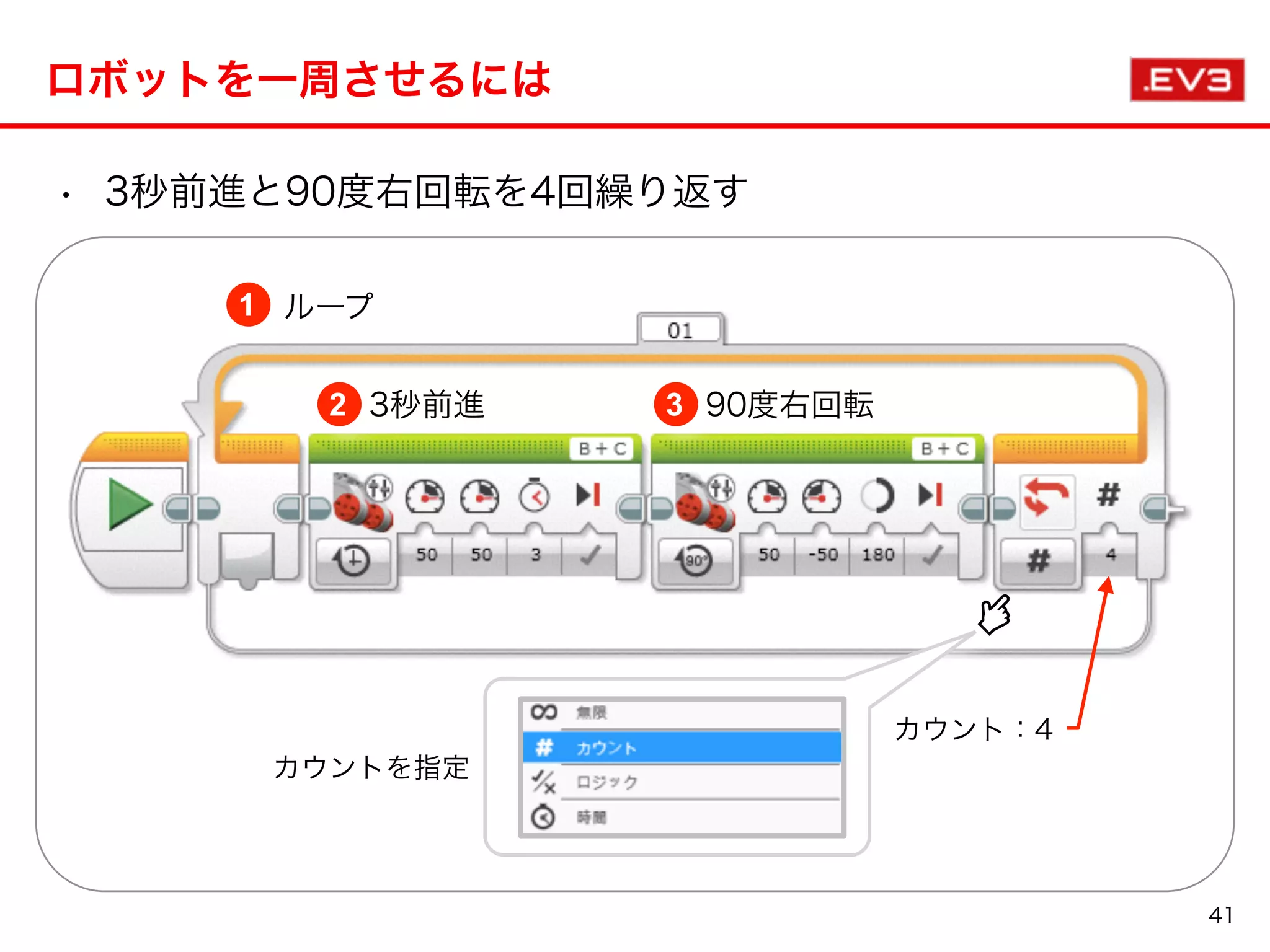
41.
ロボットを一周させるには • 3秒前進と90度右回転を4回繰り返す 41 1 2 ループ 3秒前進 カウント:4 3 90度右回転 カウントを指定
42.
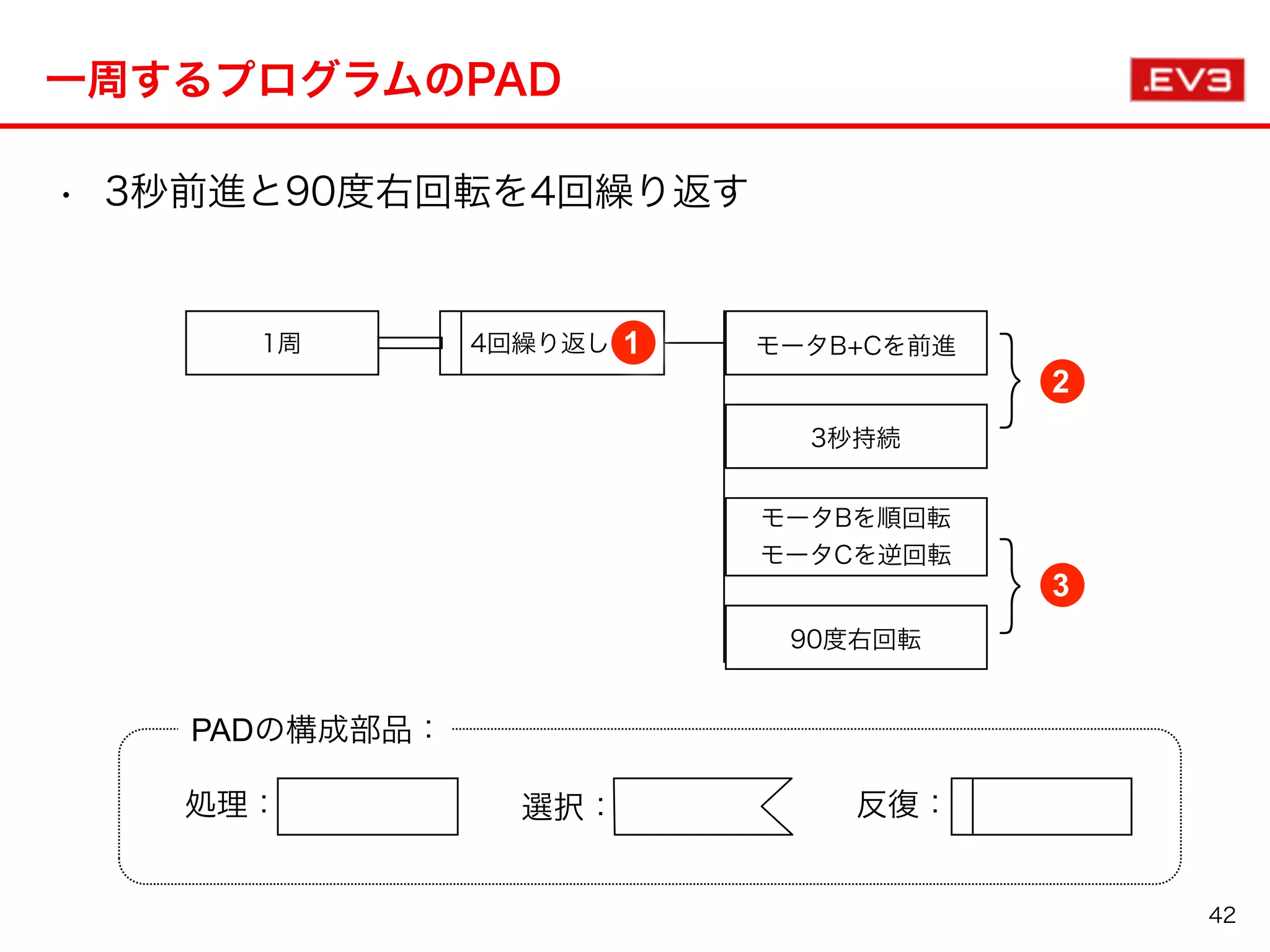
一周するプログラムのPAD 42 4回繰り返し 3秒持続 モータB+Cを前進 モータBを順回転 モータCを逆回転 90度右回転 2 3 } } 1周 1 • 3秒前進と90度右回転を4回繰り返す 反復:処理:
選択: PADの構成部品:
43.
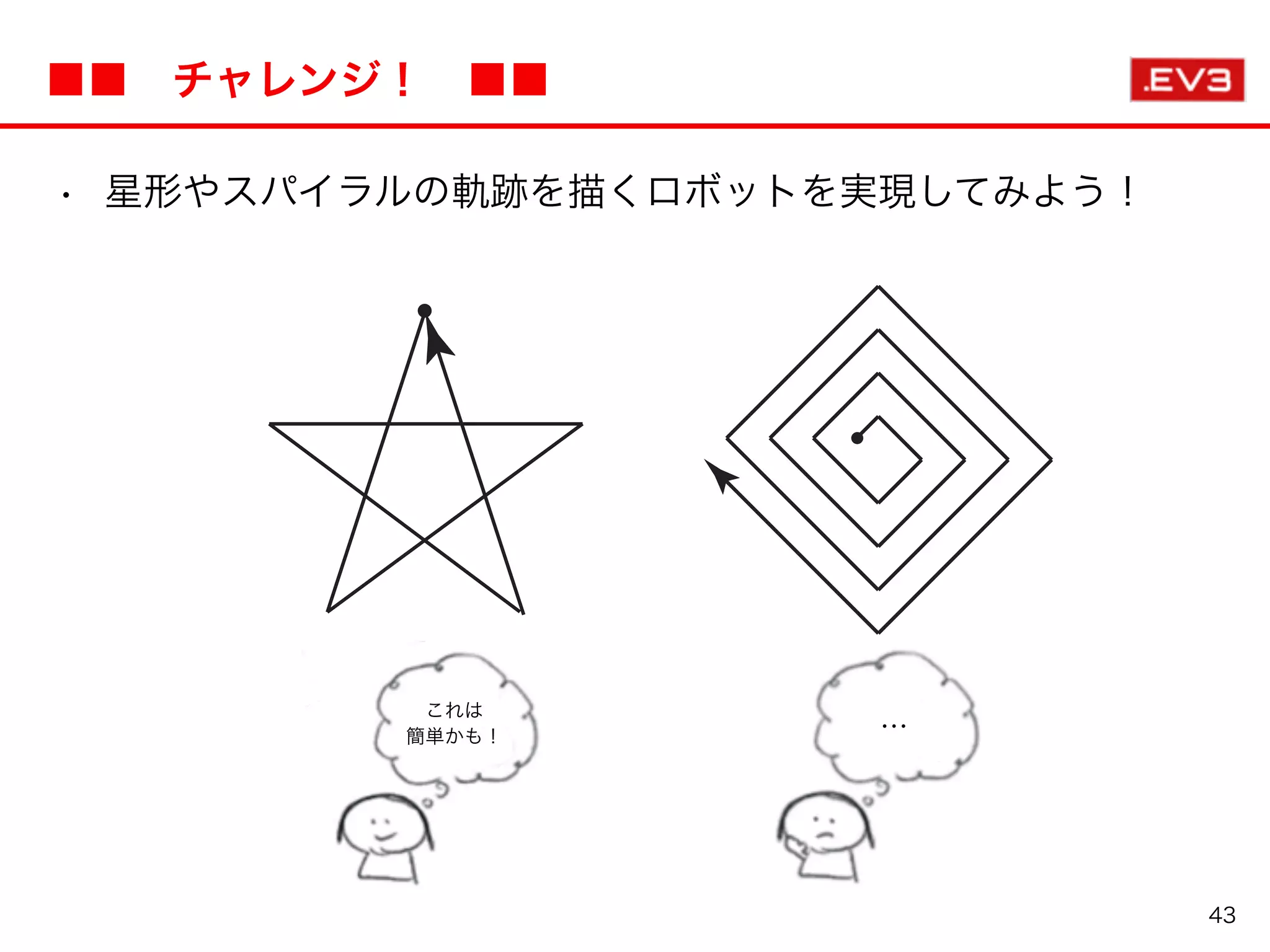
• 星形やスパイラルの軌跡を描くロボットを実現してみよう! ■■ チャレンジ! ■■ 43 これは 簡単かも! …
44.
44 ■演算と変数
45.
• モータの回転角を変化させたときの直進距離を測定し法則をみ つける 角度: 180∼1440度 50cm前進するには? 45 角度[ ]
距離[cm] 1cmあたりの 回転角度 180 9.0 20.0 360 17.5 20.6 720 34.5 20.8 1080 52.5 20.5 1440 69.5 20.4 ※1cmあたりの回転角度 =回転角度[ ] / 距離[cm] 中央値 回転角度 = 直進したい距離 1cmあたりの回転角度 20.5度
46.
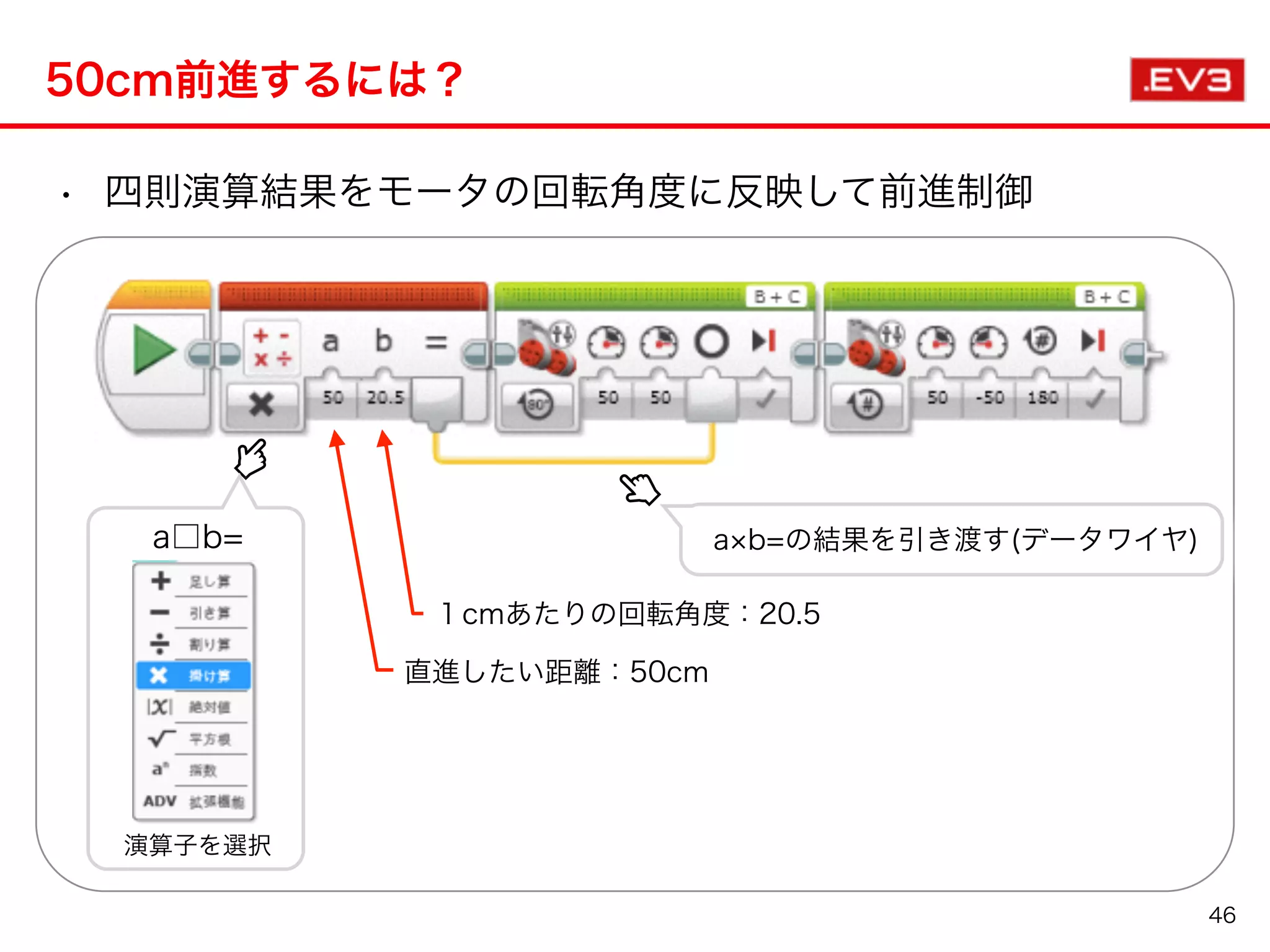
• 四則演算結果をモータの回転角度に反映して前進制御 50cm前進するには? 46 直進したい距離:50cm 1cmあたりの回転角度:20.5 演算子を選択 a□b= a
b=の結果を引き渡す(データワイヤ)
47.
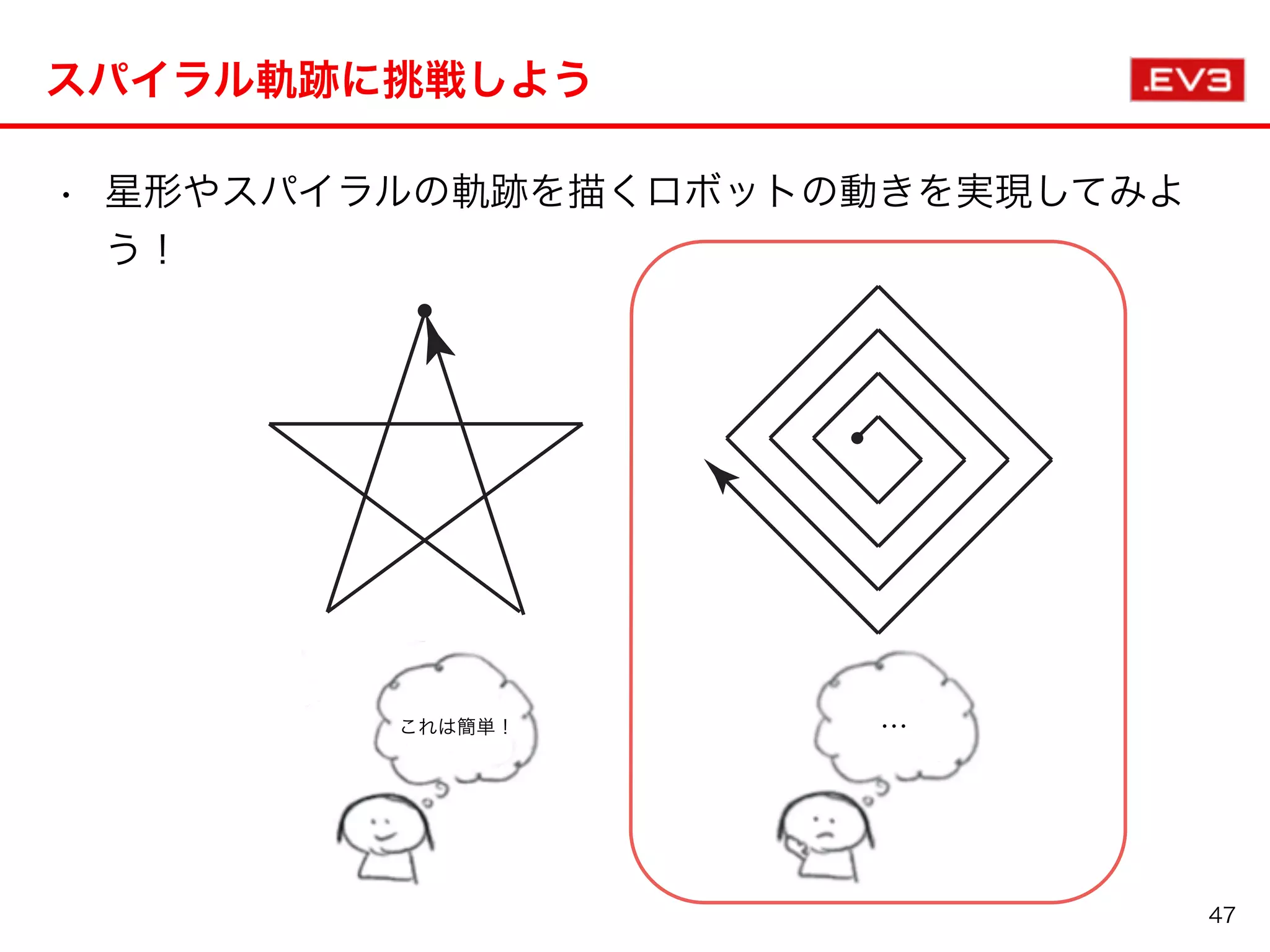
• 星形やスパイラルの軌跡を描くロボットの動きを実現してみよ う! スパイラル軌跡に挑戦しよう 47 これは簡単! …
48.
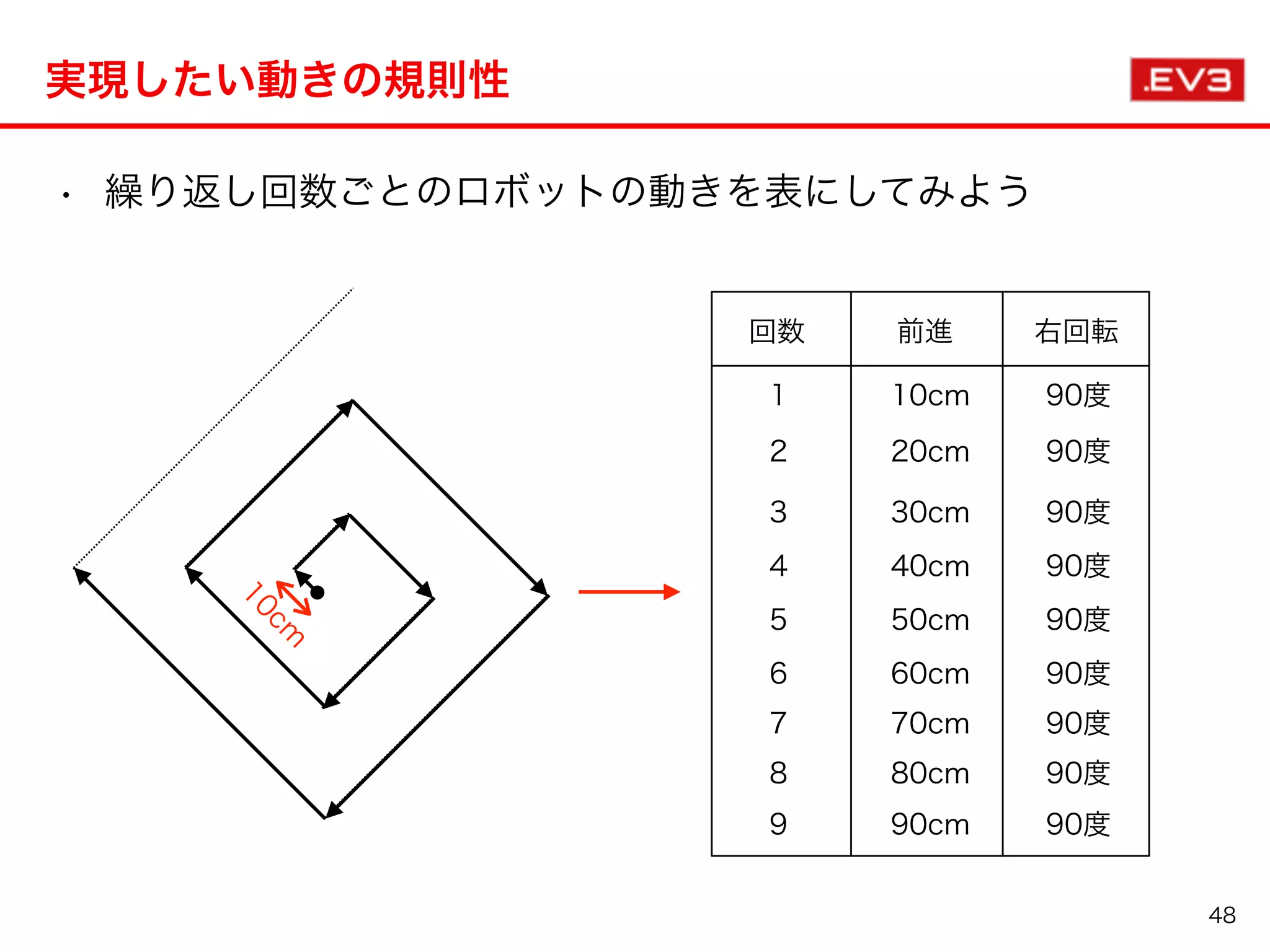
• 繰り返し回数ごとのロボットの動きを表にしてみよう 実現したい動きの規則性 48 前進 右回転回数 1
10cm 90度 2 20cm 90度 3 30cm 90度 4 40cm 90度 5 50cm 90度 6 60cm 90度 7 70cm 90度 8 80cm 90度 9 90cm 90度 10cm
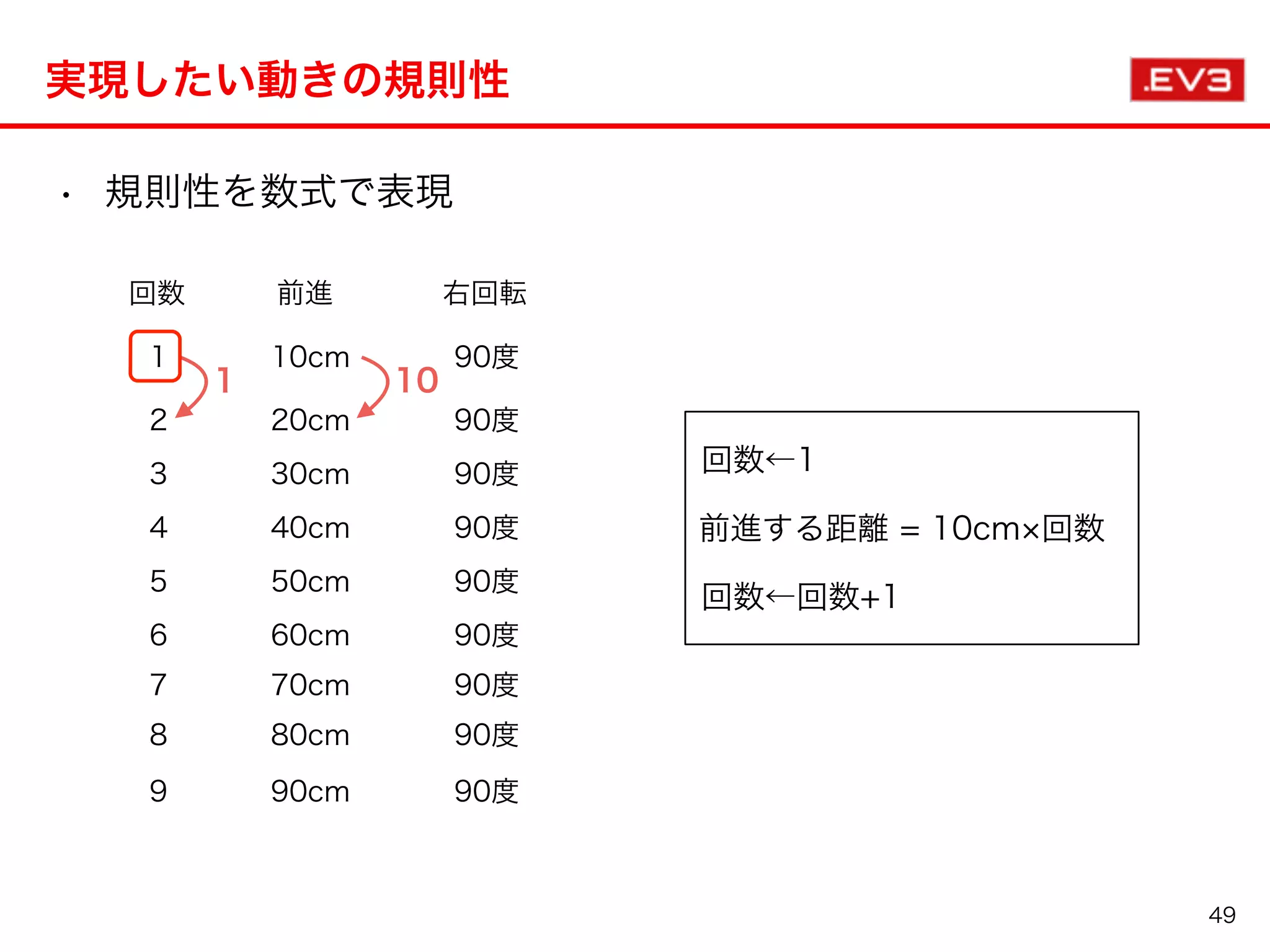
49.
• 規則性を数式で表現 実現したい動きの規則性 49 前進 右回転回数 1
10cm 90度 2 20cm 90度 3 30cm 90度 4 40cm 90度 5 50cm 90度 6 60cm 90度 7 70cm 90度 8 80cm 90度 9 90cm 90度 1 10 前進する距離 = 10cm 回数 回数←回数+1 回数←1
50.
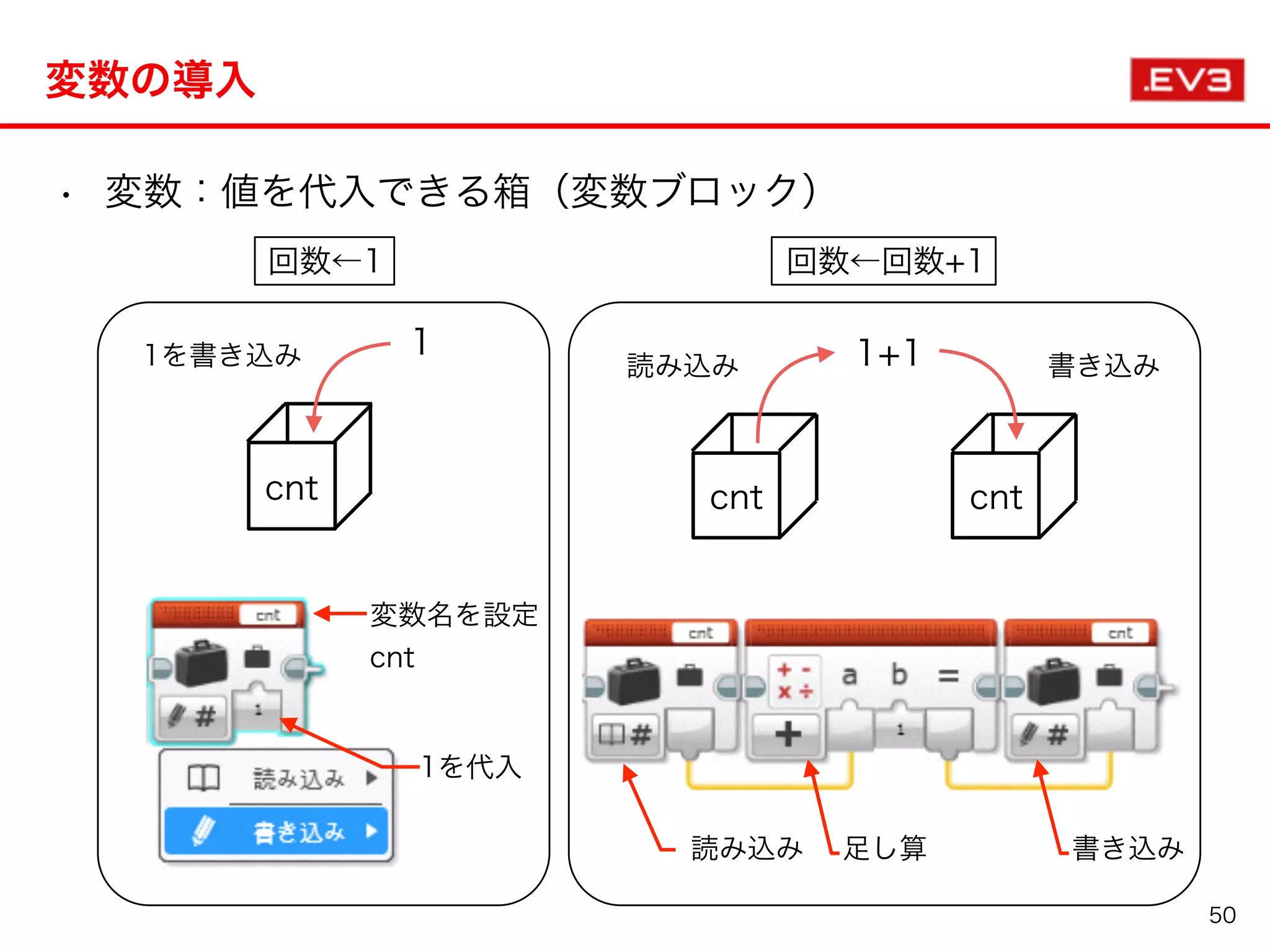
• 変数:値を代入できる箱(変数ブロック) 変数の導入 50 回数←回数+1回数←1 cnt 1 cnt 1+1 cnt 1を代入 読み込み 書き込み 1を書き込み
読み込み 書き込み 変数名を設定 cnt 足し算
51.
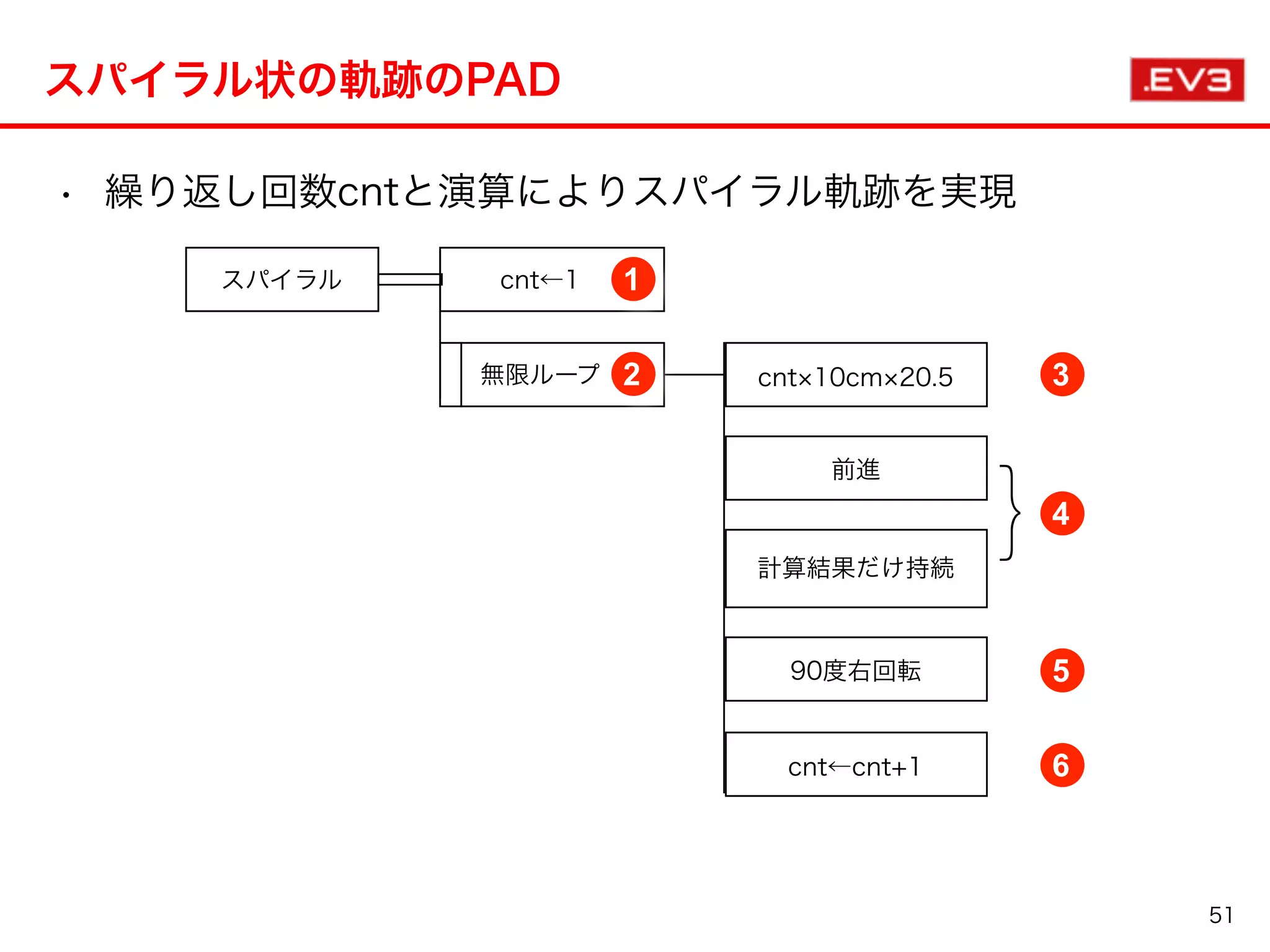
スパイラル状の軌跡のPAD 51 無限ループ 前進 cnt 10cm 20.5 計算結果だけ持続 90度右回転 4 } 2 •
繰り返し回数cntと演算によりスパイラル軌跡を実現 cnt←1スパイラル 1 cnt←cnt+1 6 5 3
52.
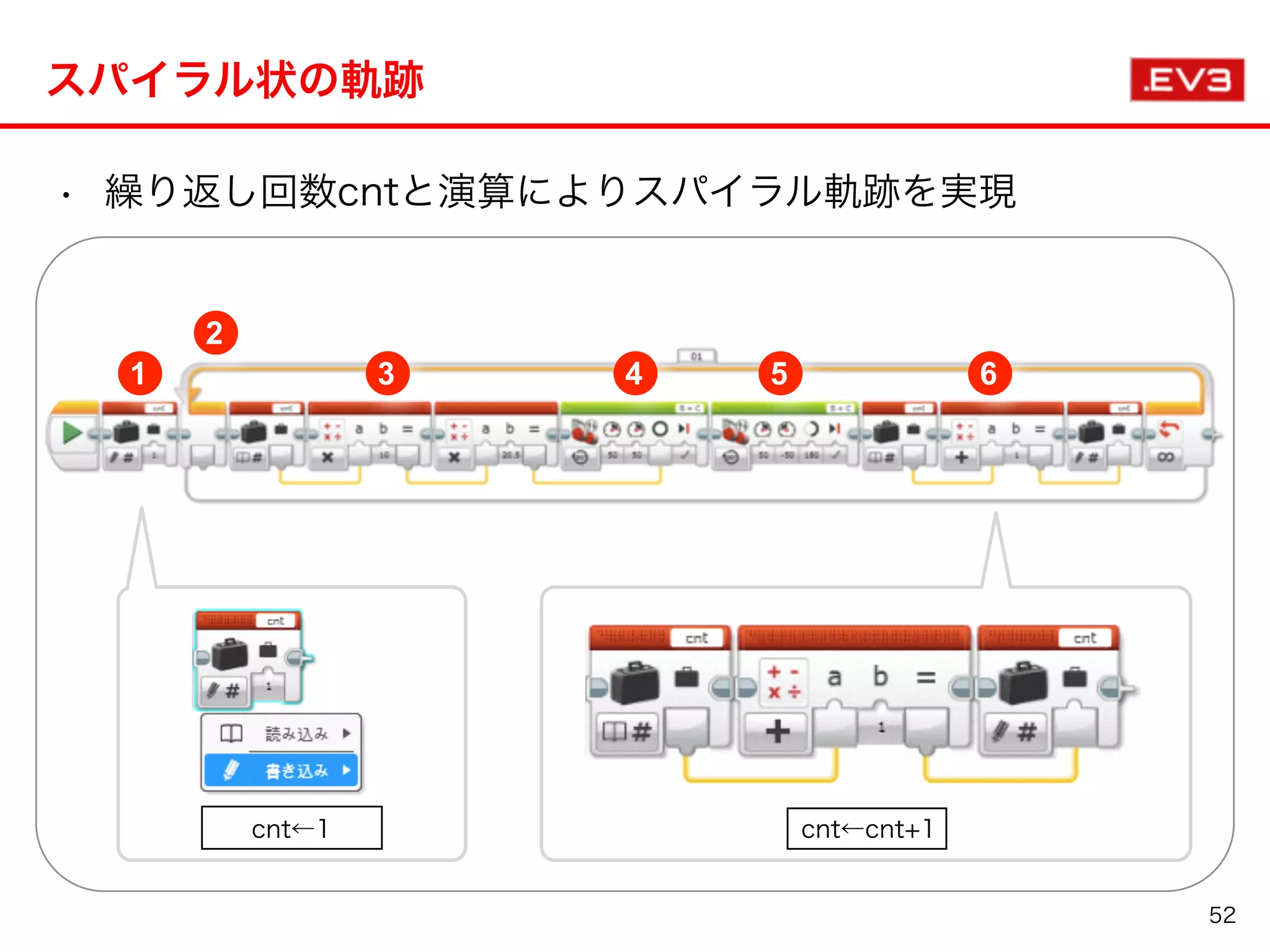
スパイラル状の軌跡 52 • 繰り返し回数cntと演算によりスパイラル軌跡を実現 1 2 3 4
5 6 cnt←cnt+1cnt←1
53.
ロボットにおける要素技術 53 感じる、判断する、動くがそなわっている人工物 ■障害物回避(タッチセンサ) ■障害物回避(超音波センサ) ■カラーセンサによるライントレース ■ジャイロセンサを用いたモータ制御
54.
■障害物回避(タッチセンサ) 54
55.
タッチセンサの原理 タッチセンサの測定原理 スイッチボタンの状態を、押されていないときは 0 、押されたら
1 , 離したときに 2 を出力する スイッチボタン 55
56.
• EV3の入力ポート1にタッセンサを接続 タッチセンサの接続 入力ポート1 ※EV3では入力ポートにどのセンサを接続しているか判定しているため、必ず入力ポート1である必要はない 56
57.
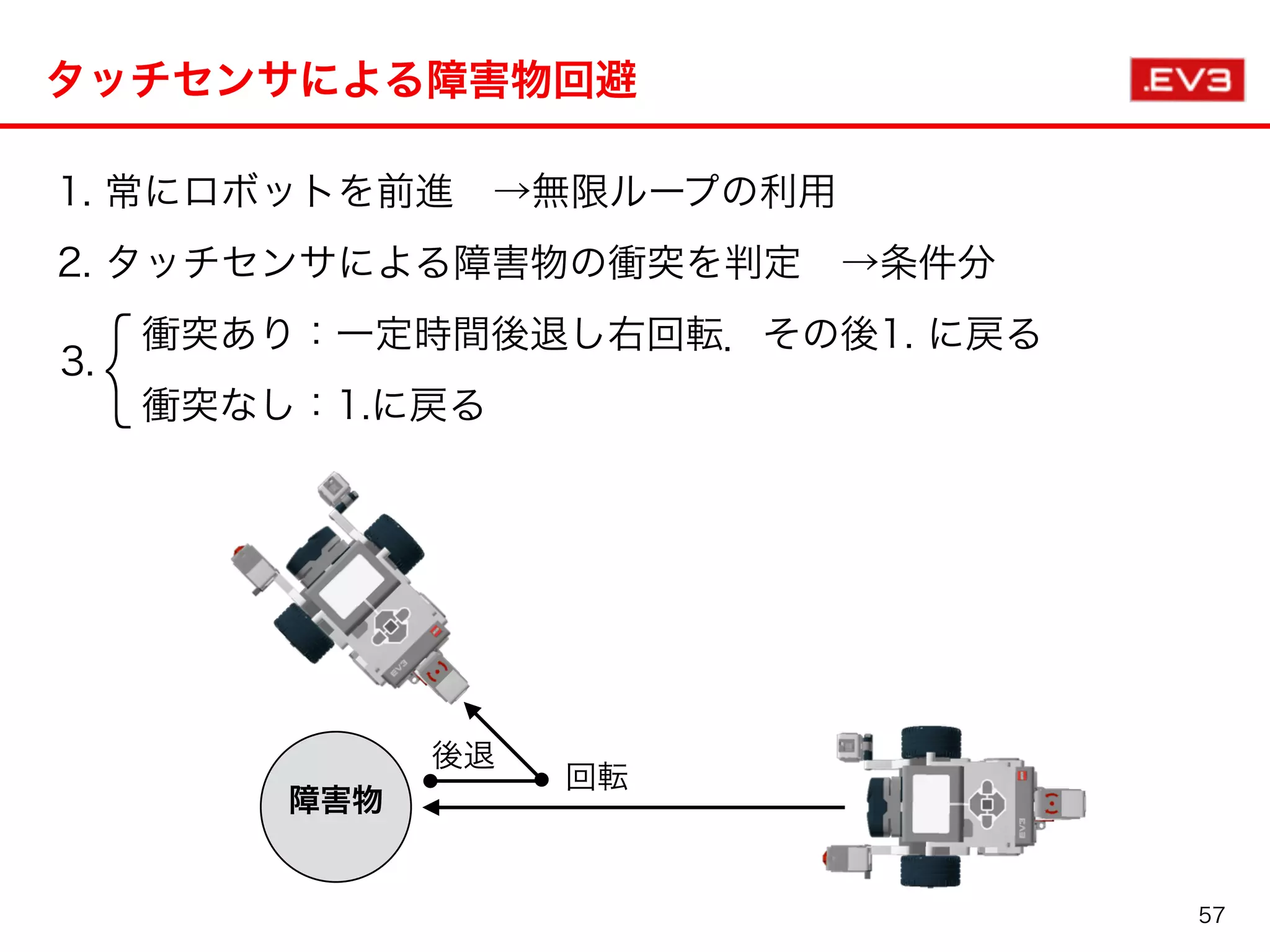
1. 常にロボットを前進 →無限ループの利用 2. タッチセンサによる障害物の衝突を判定 →条件分
衝突あり:一定時間後退し右回転.その後1. に戻る 衝突なし:1.に戻る タッチセンサによる障害物回避 障害物 後退 回転 }3. 57
58.
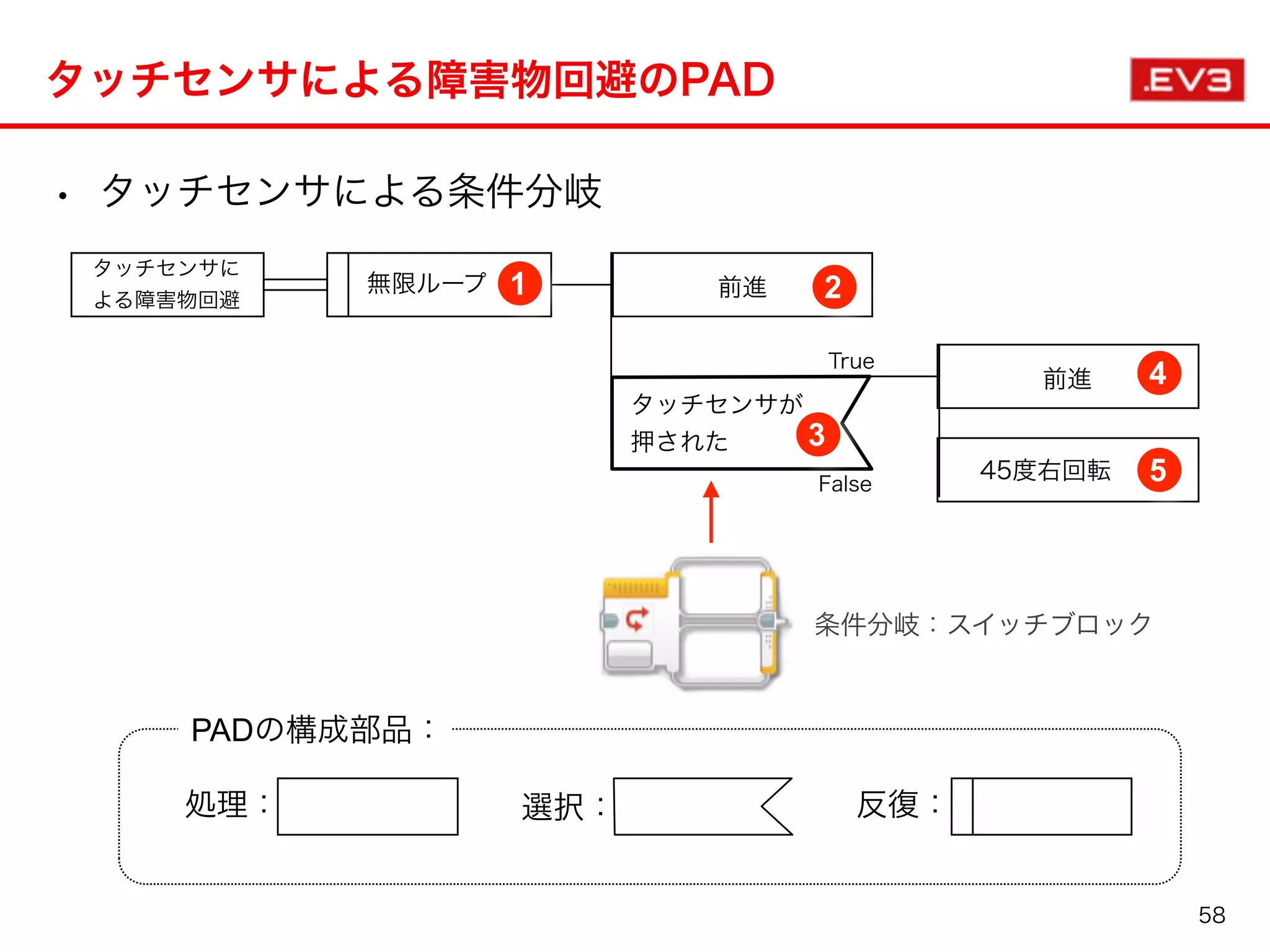
• タッチセンサによる条件分岐 タッチセンサによる障害物回避のPAD 条件分岐:スイッチブロック タッチセンサが 押された 前進 2 タッチセンサに よる障害物回避 1 4 無限ループ 45度右回転 前進 3 5 True False 反復:処理:
選択: PADの構成部品: 58
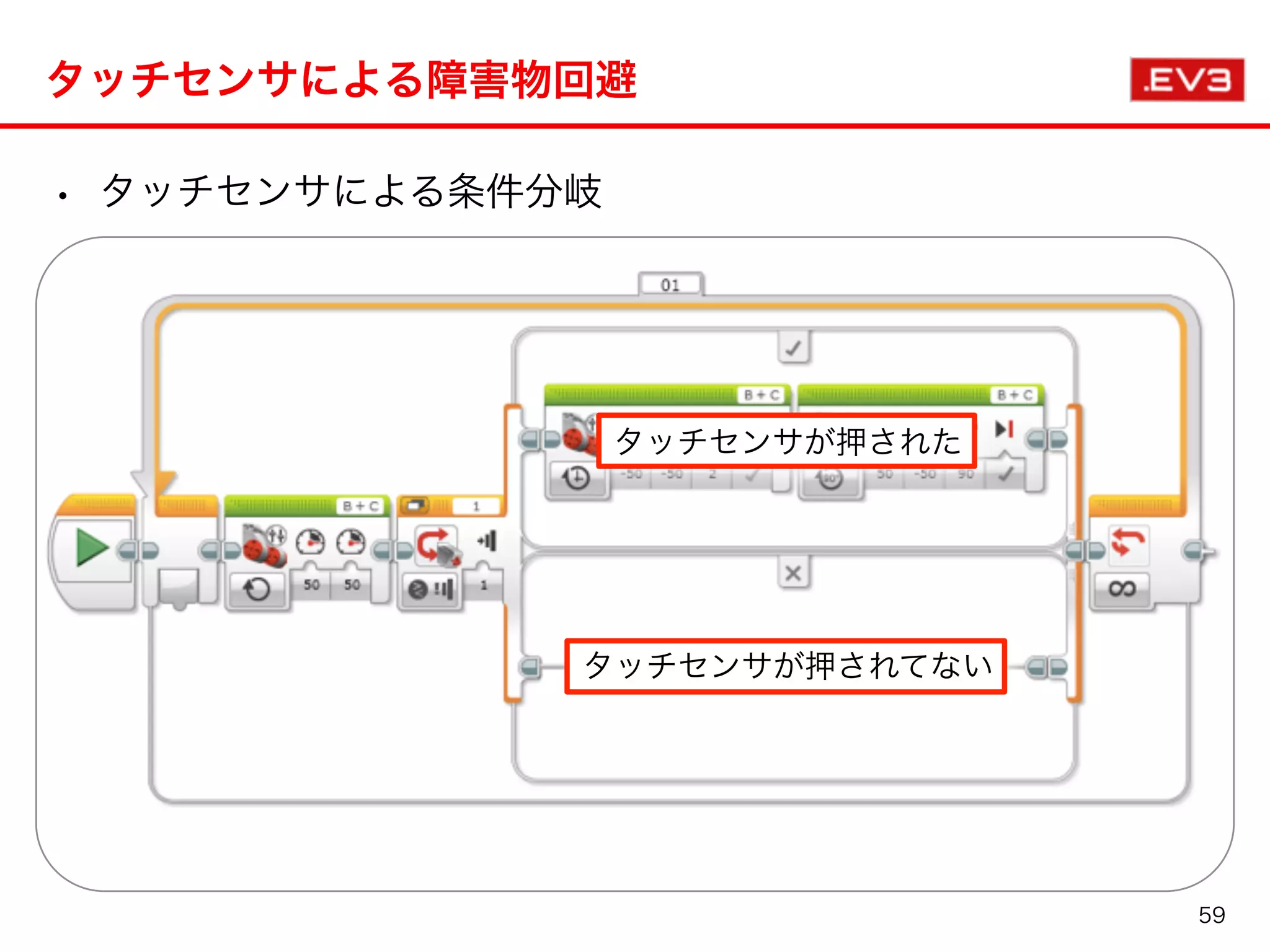
59.
• タッチセンサによる条件分岐 タッチセンサによる障害物回避 タッチセンサが押された タッチセンサが押されてない 59
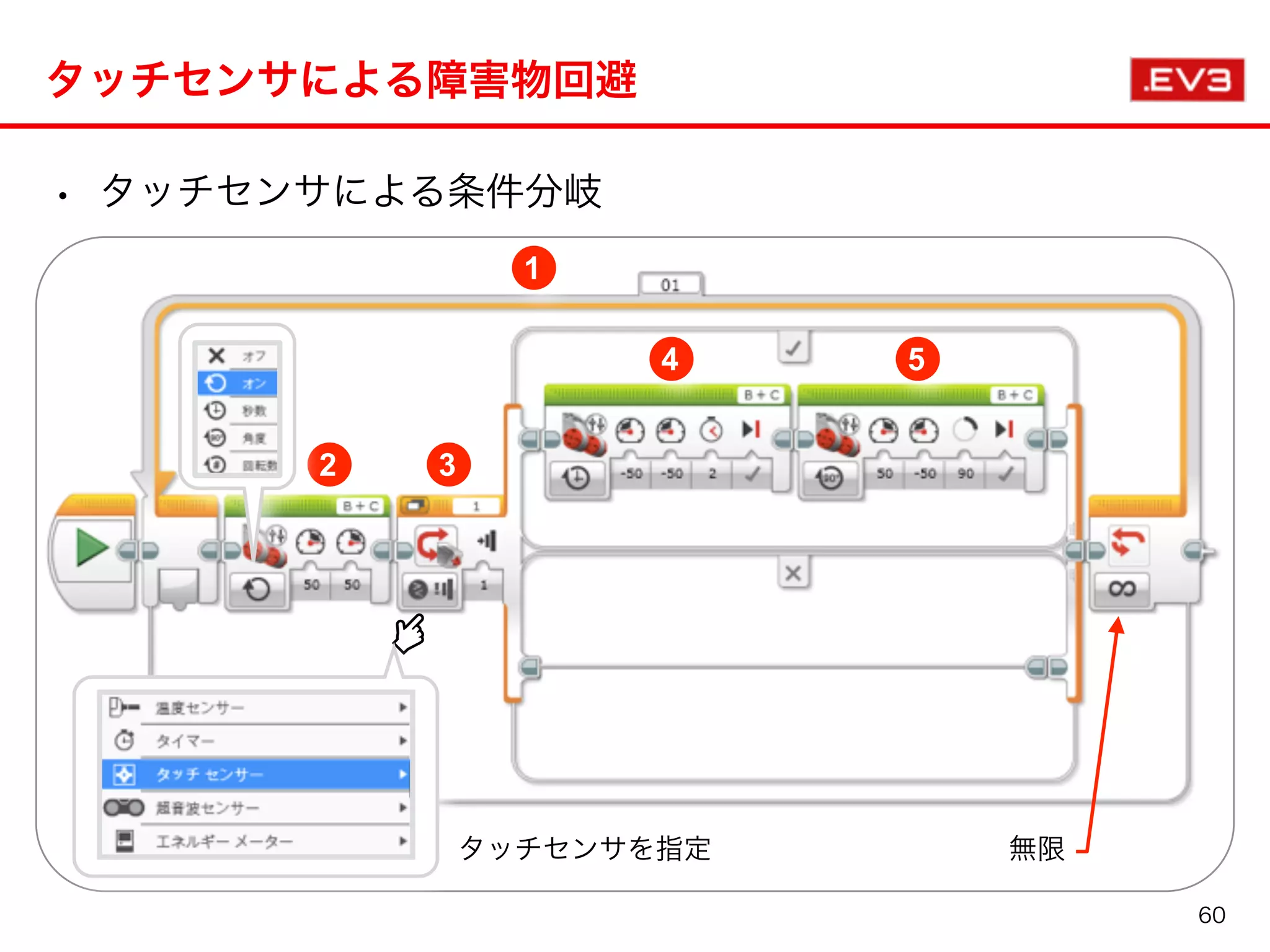
60.
• タッチセンサによる条件分岐 タッチセンサによる障害物回避 タッチセンサを指定 1 2 3 4
5 無限 60
61.
■障害物回避(超音波センサ) 61
62.
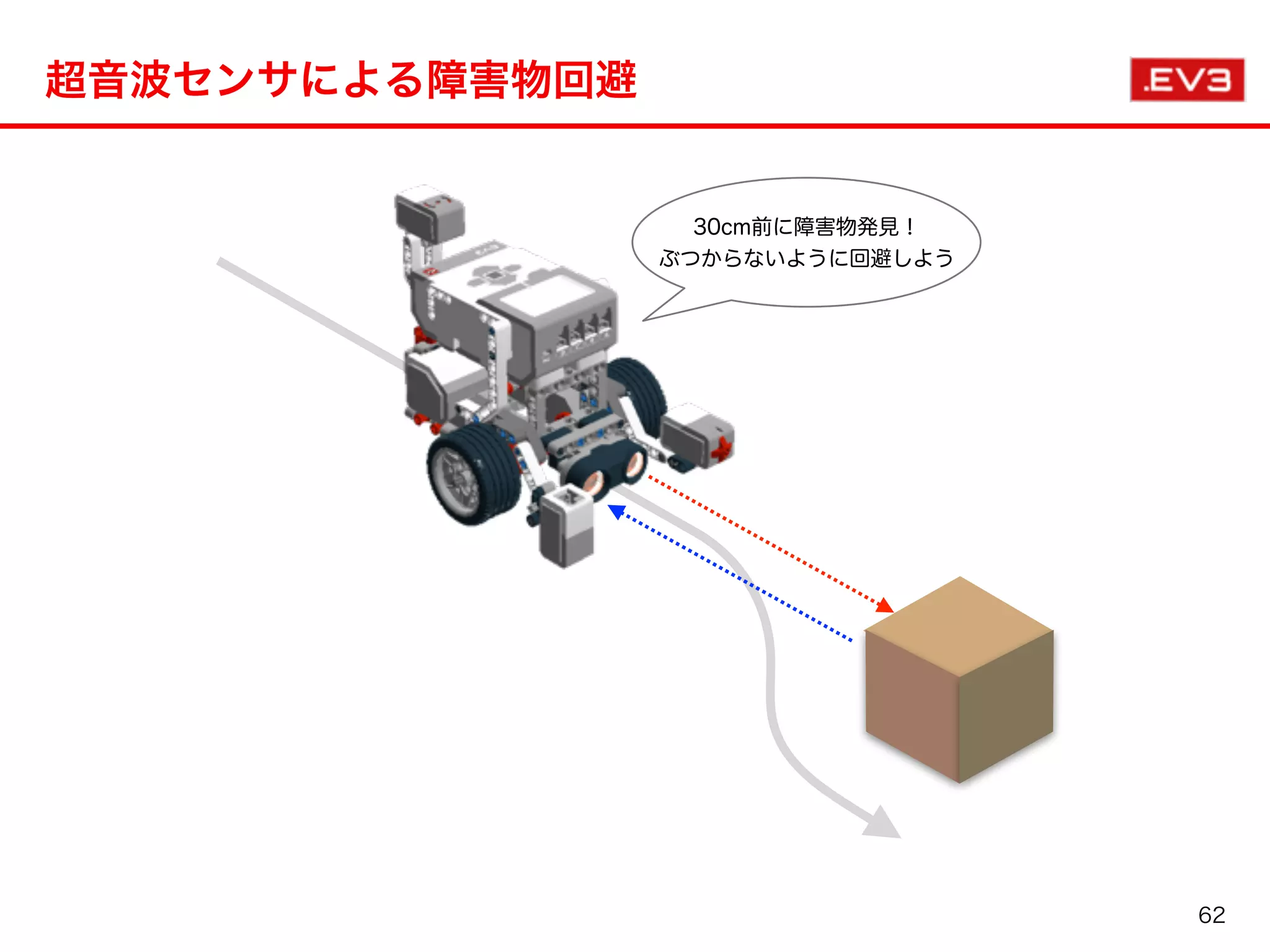
超音波センサによる障害物回避 30cm前に障害物発見! ぶつからないように回避しよう 62
63.
超音波センサ 超音波センサの測定原理 超音波を発信し、対象物で反射した超音波を受信し、この音波の発信 から受信までの時間を計測することで対象物までの距離を計測 発信素子受信素子 63
64.
• EV3の入力ポート4に超音波センサを接続 超音波センサの接続 入力ポート4 ※EV3では入力ポートにどのセンサを接続しているか判定しているため、必ず入力ポート4である必要はない 64
65.
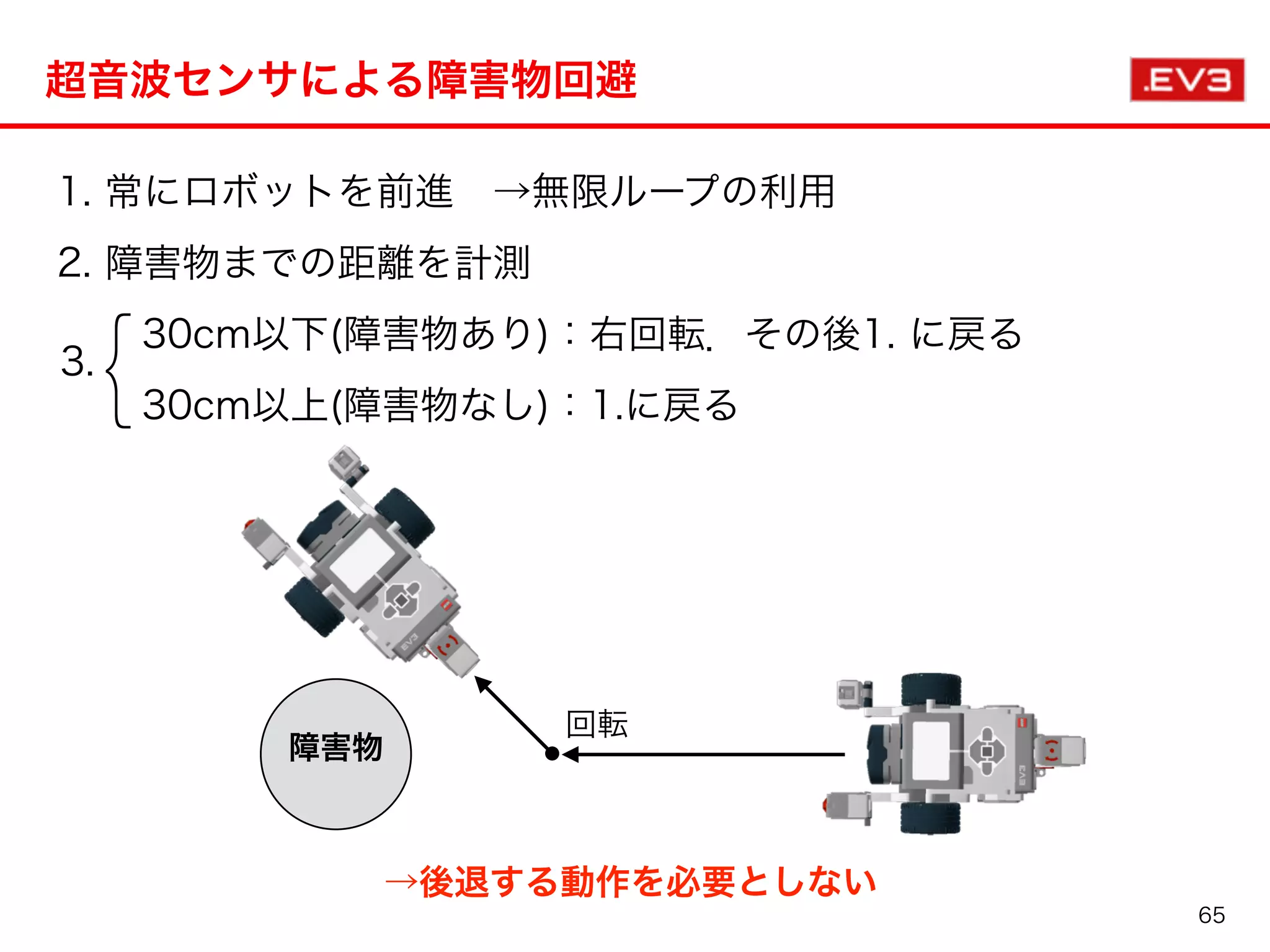
1. 常にロボットを前進 →無限ループの利用 2. 障害物までの距離を計測
30cm以下(障害物あり):右回転.その後1. に戻る 30cm以上(障害物なし):1.に戻る 超音波センサによる障害物回避 →後退する動作を必要としない }3. 障害物 回転 65
66.
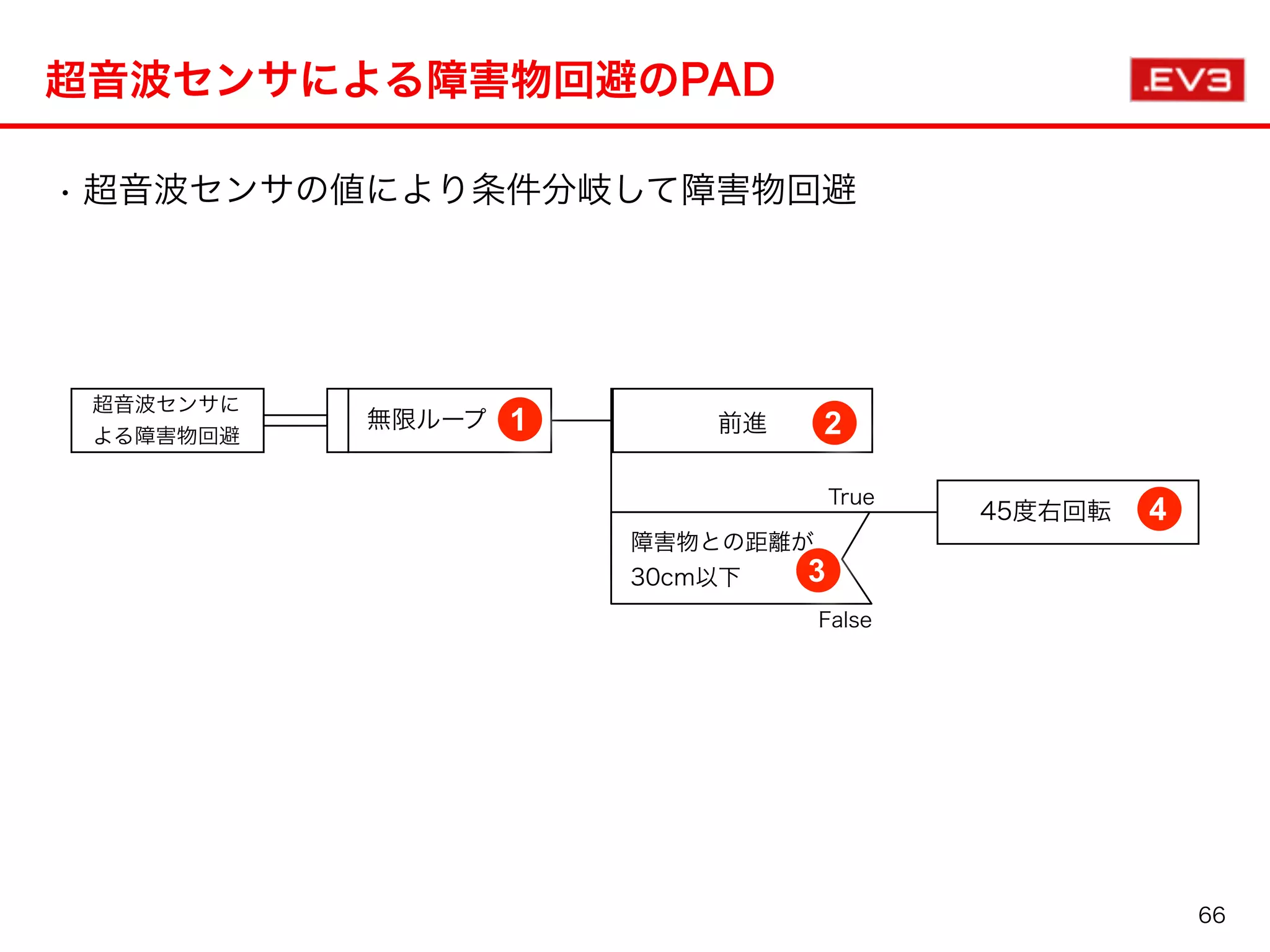
• 超音波センサの値により条件分岐して障害物回避 超音波センサによる障害物回避のPAD 障害物との距離が 30cm以下 前進 2 超音波センサに よる障害物回避 1 4 無限ループ 45度右回転 3 True False 66
67.
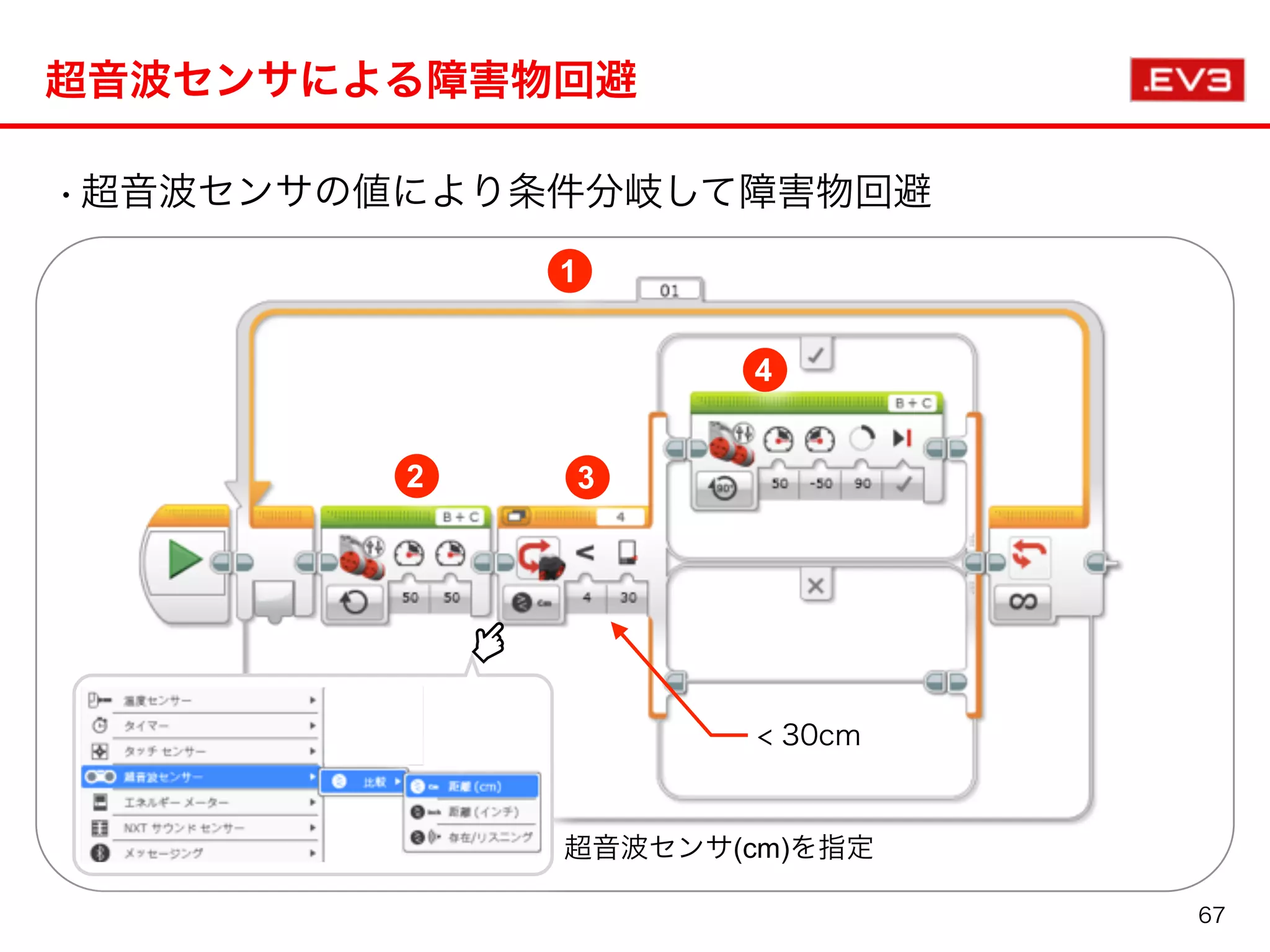
•超音波センサの値により条件分岐して障害物回避 超音波センサによる障害物回避 1 2 3 4 < 30cm 超音波センサ(cm)を指定 67
68.
■カラーセンサによるライントレース 68
69.
カラーセンサ カラーセンサの測定原理 LEDにより赤、緑、青の光を照射して、それぞれの反射量(R, G, B成 分)をフォトダイオードで計測して,カラーに変換 フォトダイオード LED 69
70.
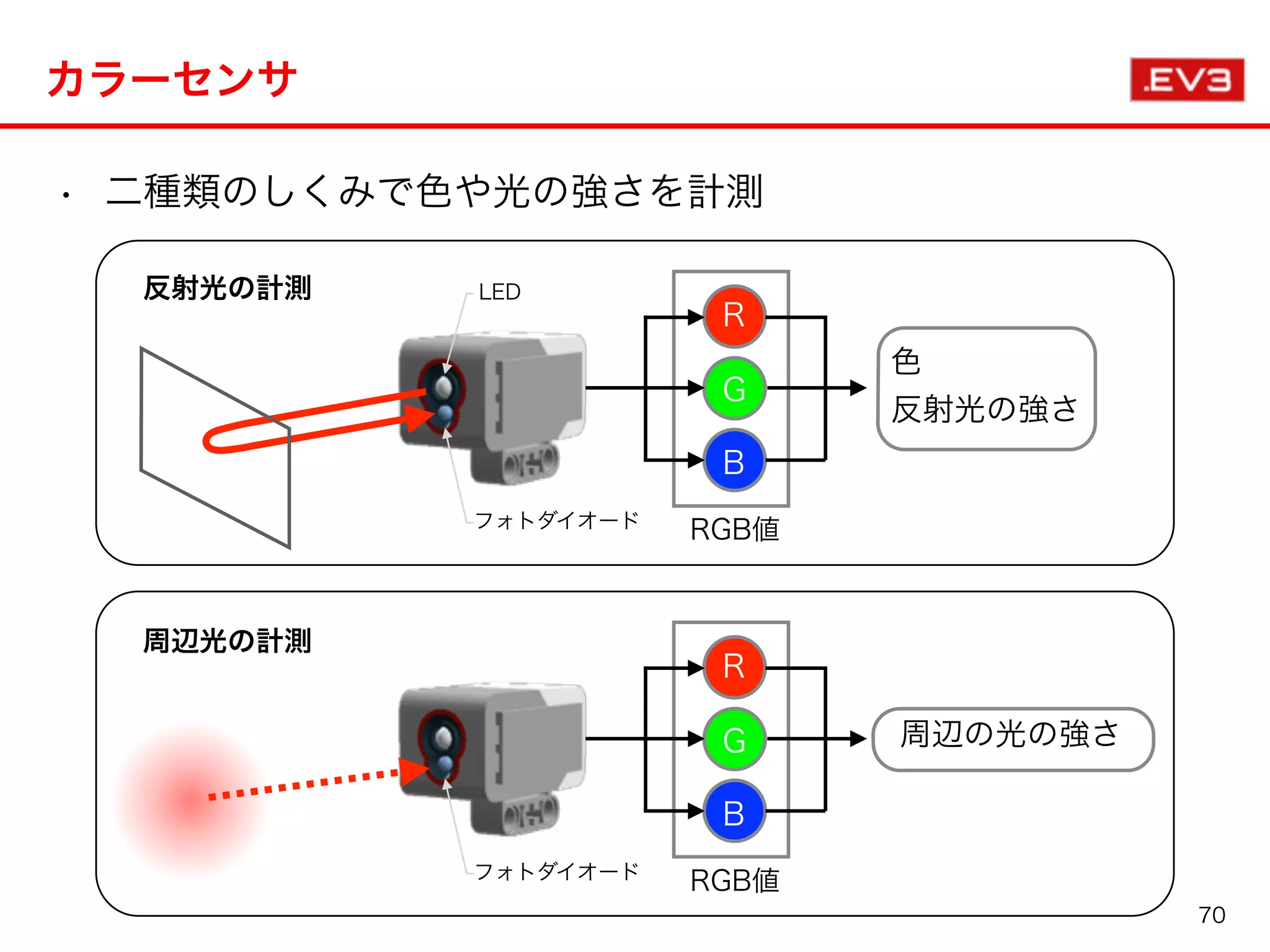
カラーセンサ • 二種類のしくみで色や光の強さを計測 RGB値 色 反射光の強さ RGB値 周辺の光の強さ フォトダイオード R G B R G B LED反射光の計測 周辺光の計測 フォトダイオード 70
71.
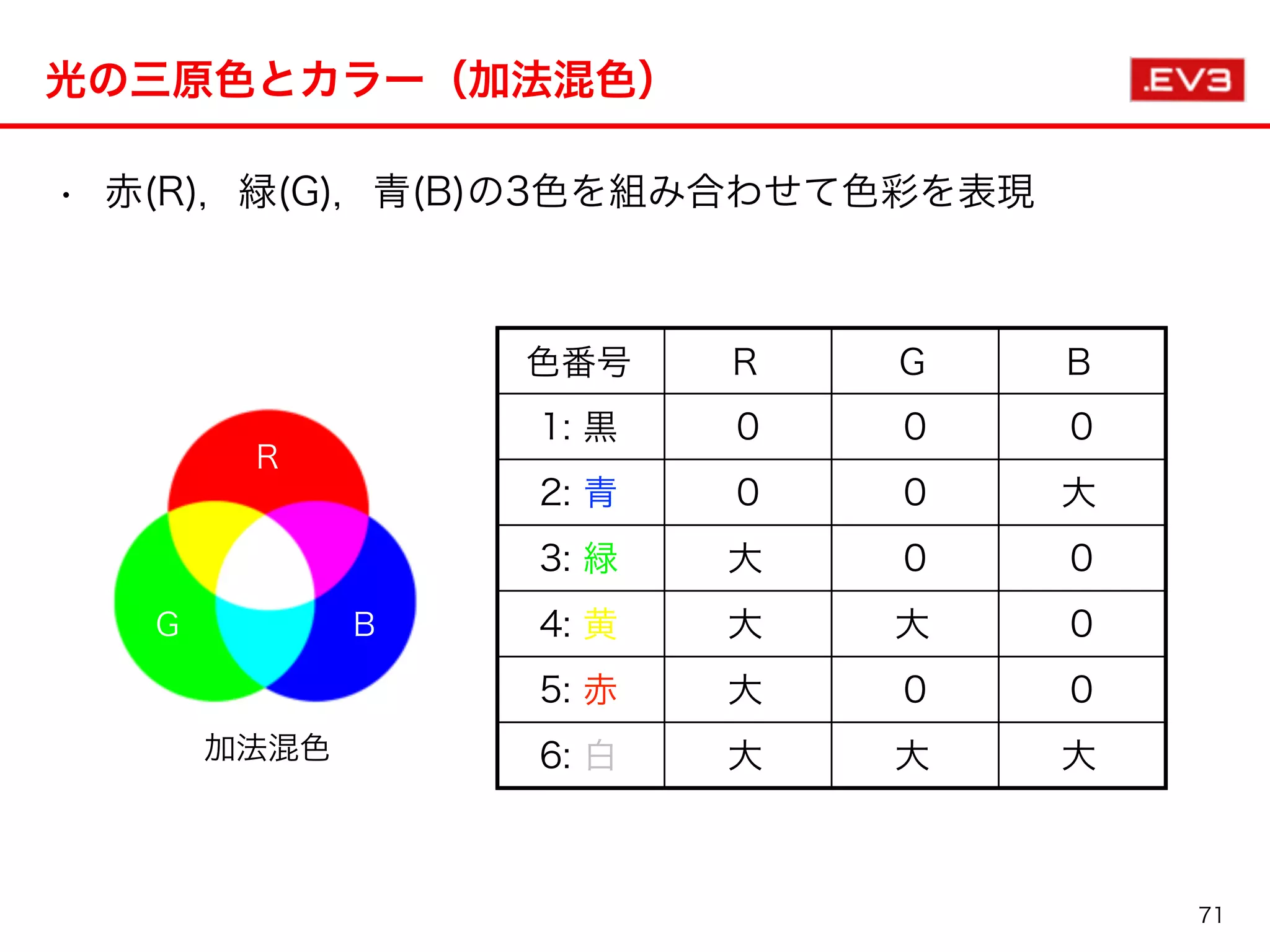
光の三原色とカラー(加法混色) • 赤(R),緑(G),青(B)の3色を組み合わせて色彩を表現 色番号 R
G B 1: 黒 0 0 0 2: 青 0 0 大 3: 緑 大 0 0 4: 黄 大 大 0 5: 赤 大 0 0 6: 白 大 大 大 R G B 加法混色 71
72.
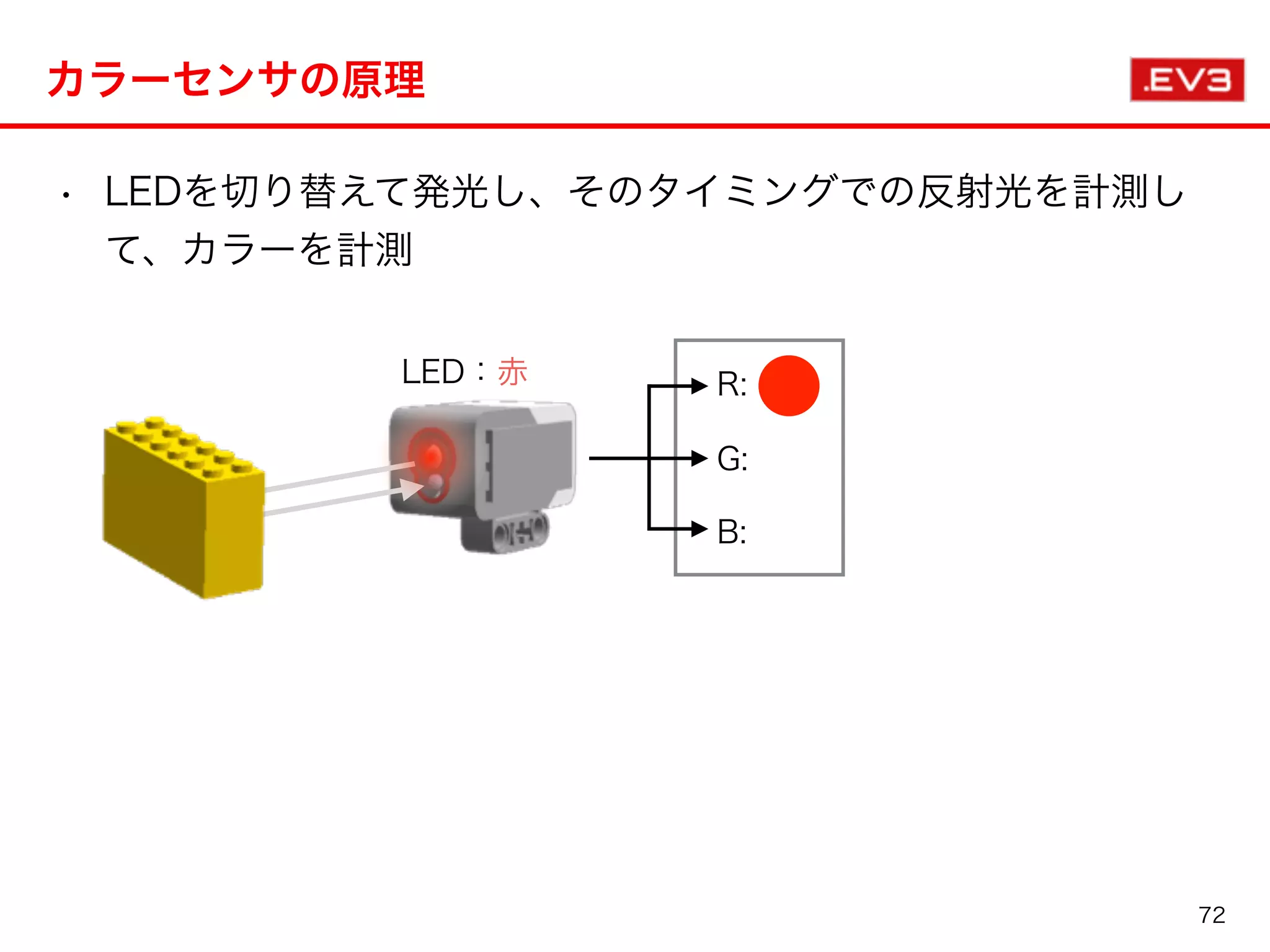
• LEDを切り替えて発光し、そのタイミングでの反射光を計測し て、カラーを計測 カラーセンサの原理 LED:赤 R: G: B: 72
73.
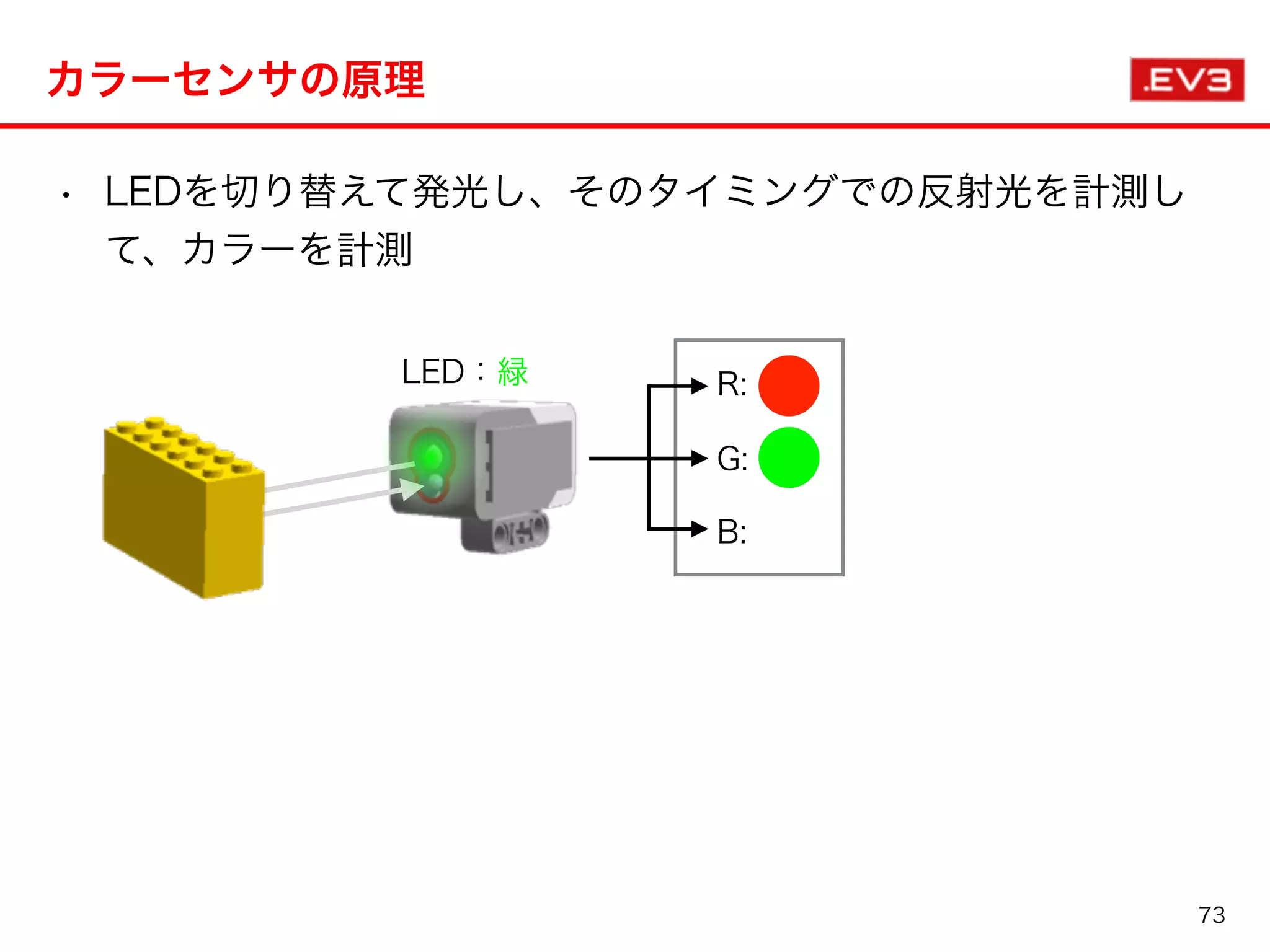
• LEDを切り替えて発光し、そのタイミングでの反射光を計測し て、カラーを計測 カラーセンサの原理 LED:緑 R: G: B: 73
74.
• LEDを切り替えて発光し、そのタイミングでの反射光を計測し て、カラーを計測 カラーセンサの原理 LED:青 R: G: B: 黄色 オシロスコープで計測してみたところ: 1秒間に1,000回、R,G,Bと切り替えて発光し、 同期してフォトダイオードで反射光量を計測 1[ms] 74
75.
• EV3の入力ポート3にカラーセンサを接続 カラーセンサの接続 入力ポート3 ※EV3では入力ポートにどのセンサを接続しているか判定しているため、必ず入力ポート3である必要はない 75
76.
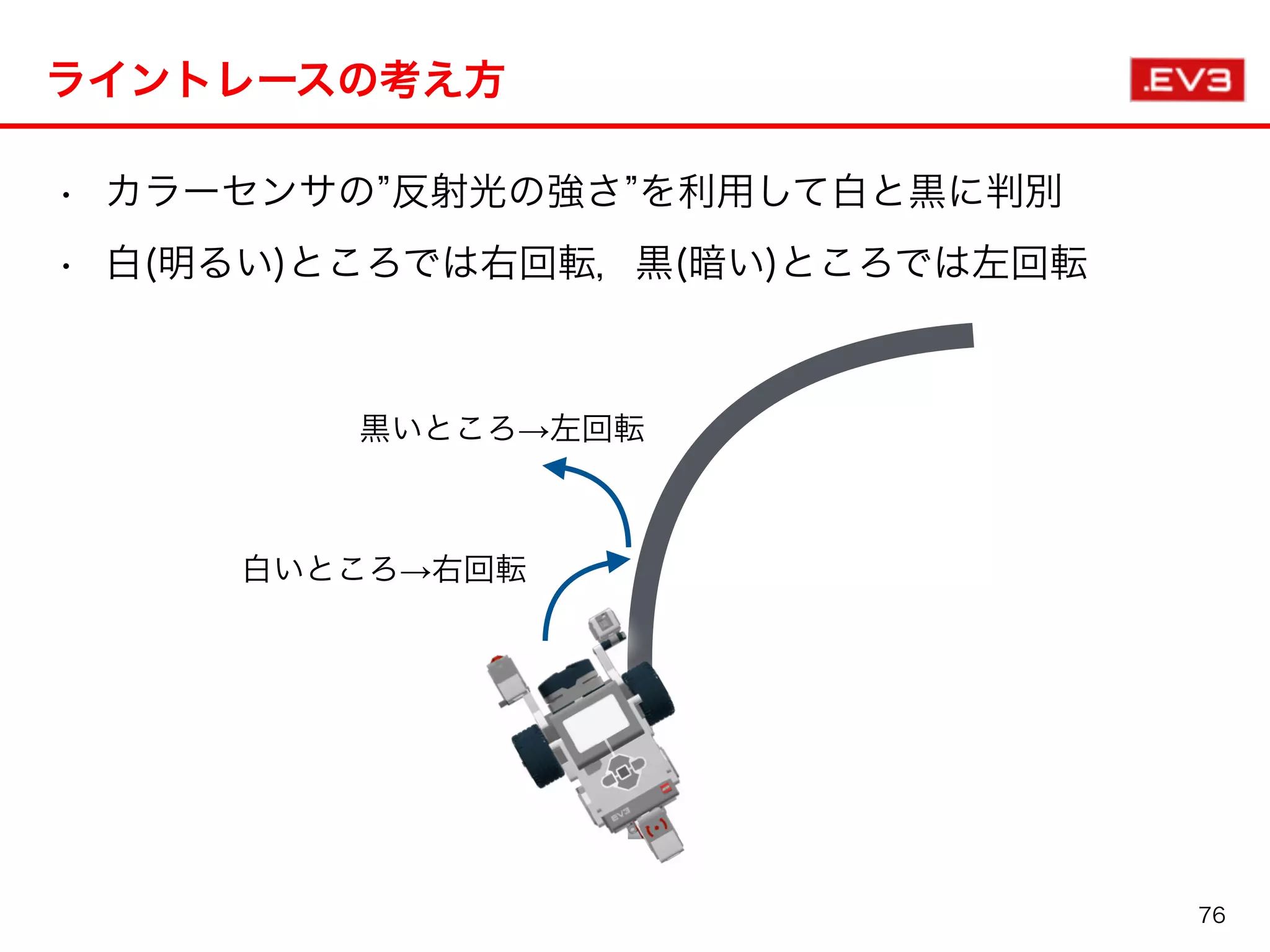
ライントレースの考え方 • カラーセンサの 反射光の強さ
を利用して白と黒に判別 • 白(明るい)ところでは右回転,黒(暗い)ところでは左回転 白いところ→右回転 黒いところ→左回転 76
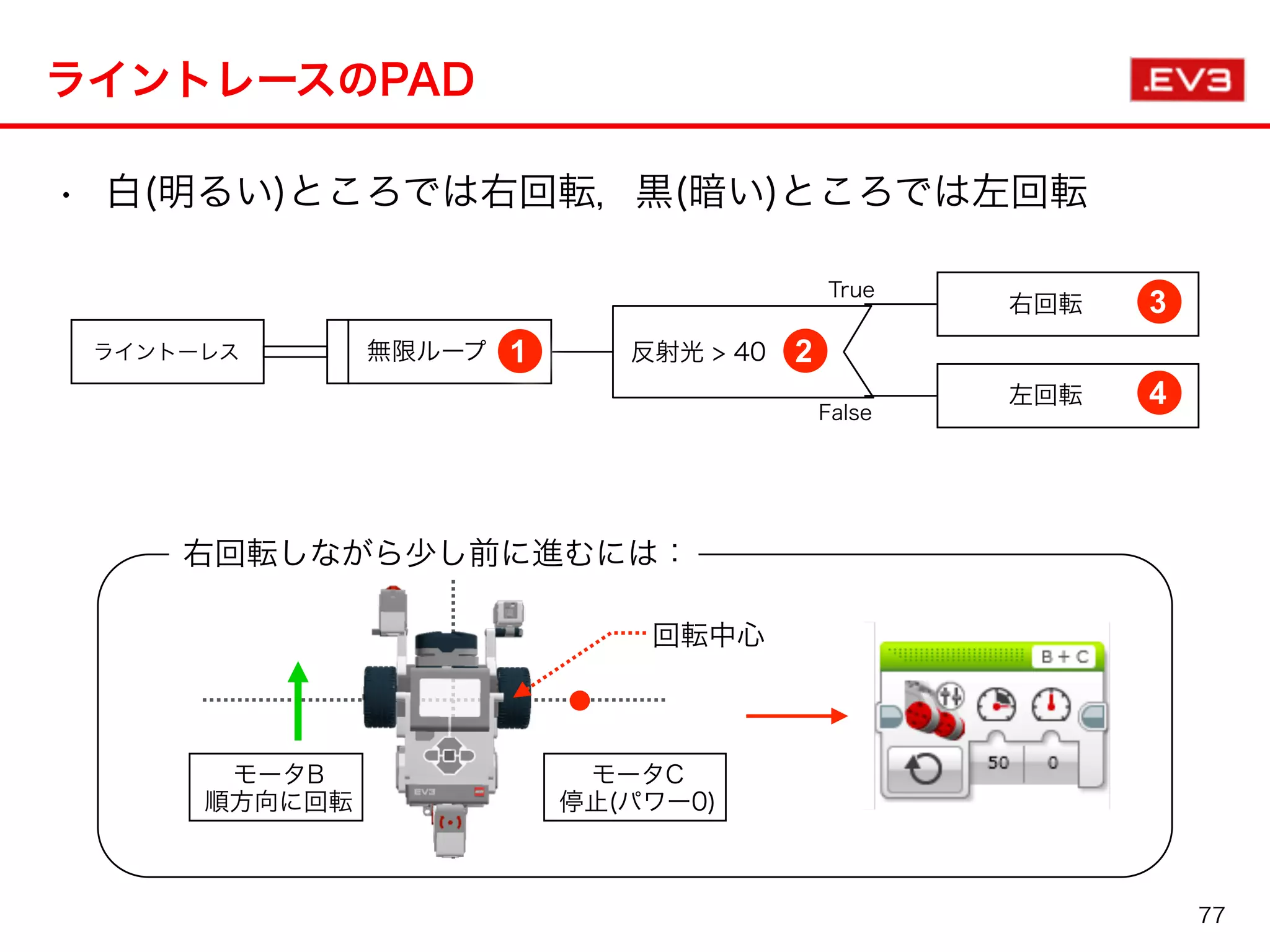
77.
ライントレースのPAD • 白(明るい)ところでは右回転,黒(暗い)ところでは左回転 反射光 >
40ライントーレス 1 3 無限ループ 右回転 2 True False 4左回転 回転中心 モータB 順方向に回転 モータC 停止(パワー0) 右回転しながら少し前に進むには: 77
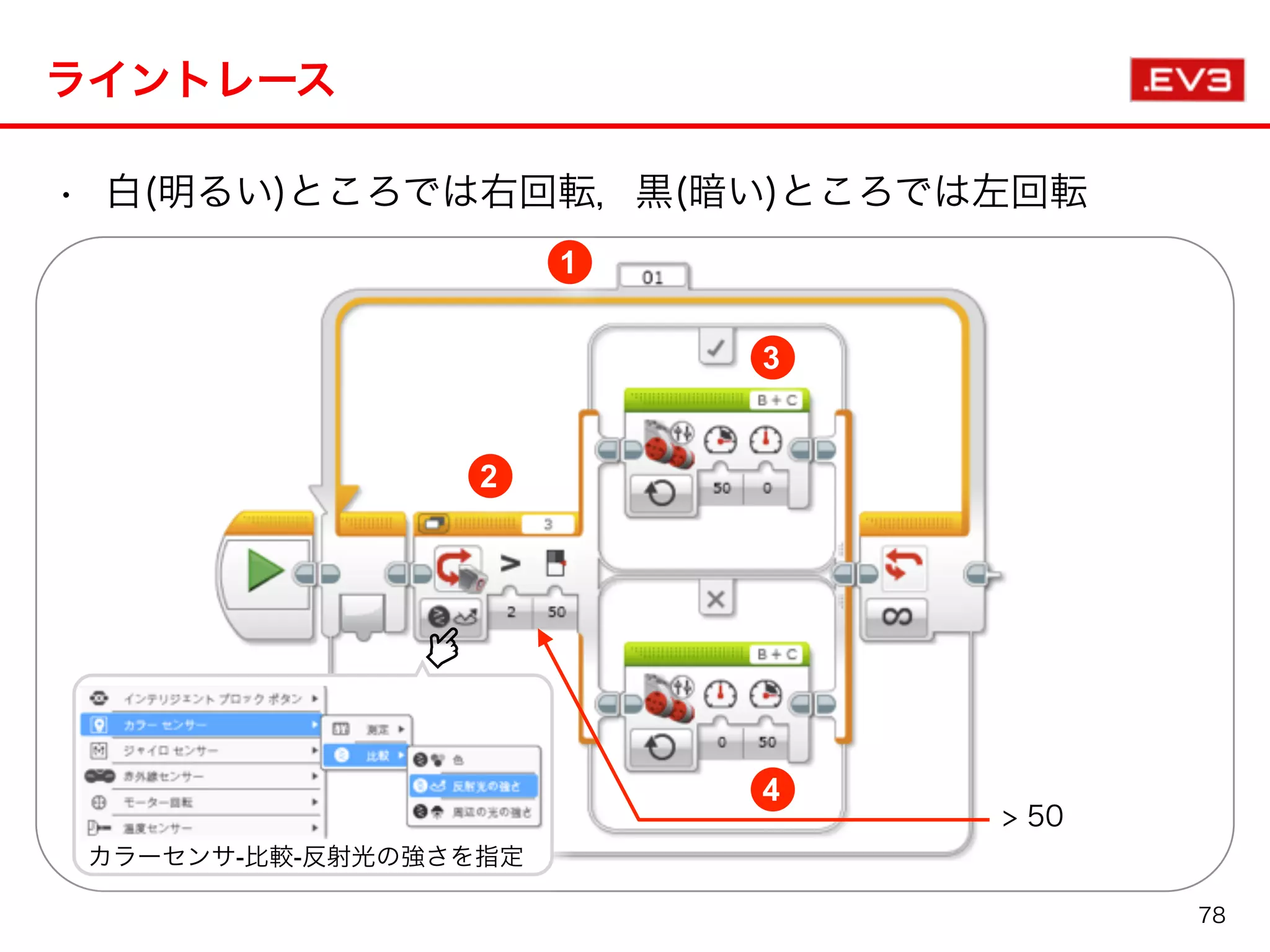
78.
• 白(明るい)ところでは右回転,黒(暗い)ところでは左回転 ライントレース 1 2 3 4 カラーセンサ-比較-反射光の強さを指定 > 50 78
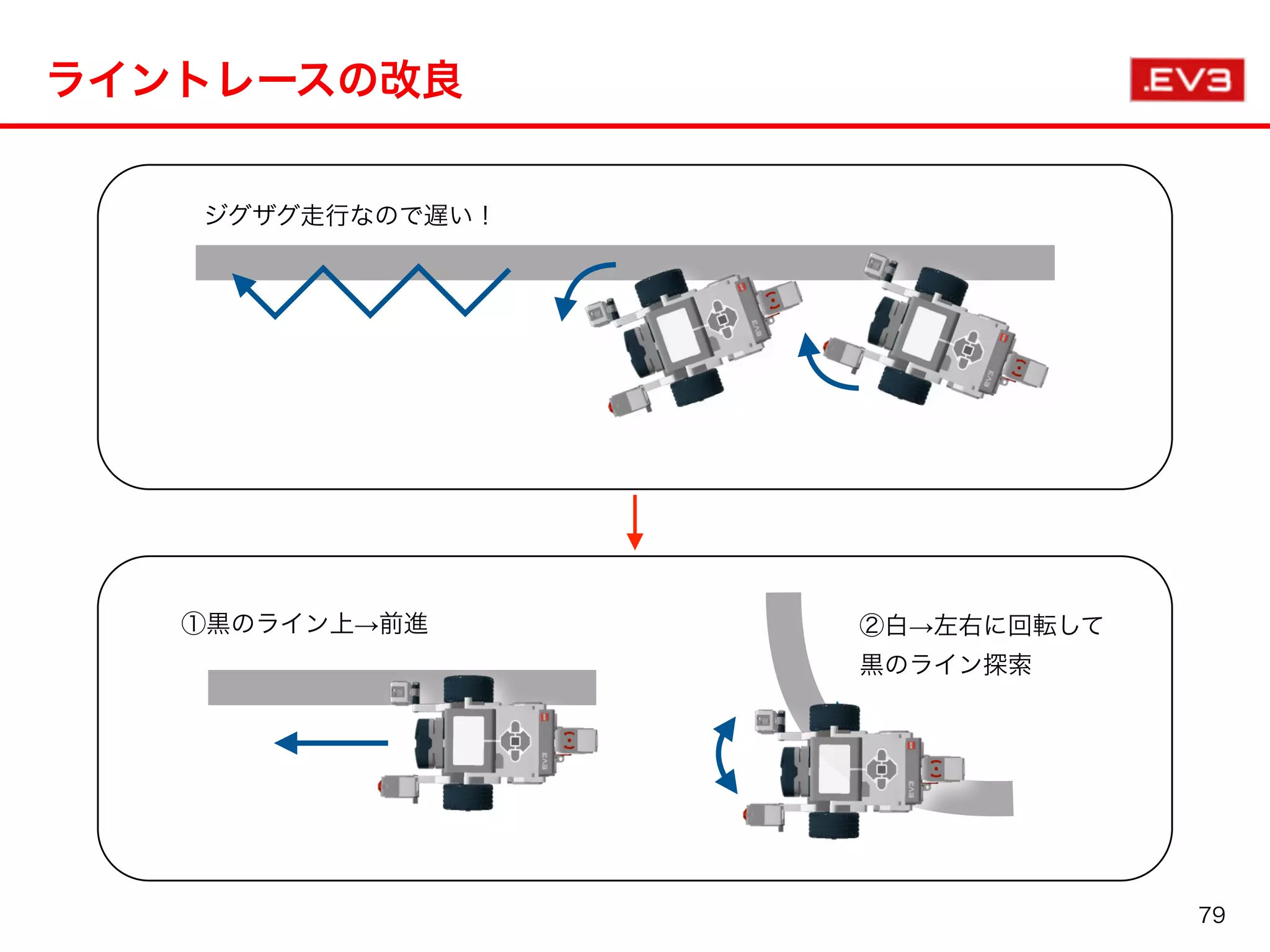
79.
ライントレースの改良 ジグザグ走行なので遅い! ①黒のライン上→前進 ②白→左右に回転して 黒のライン探索 79
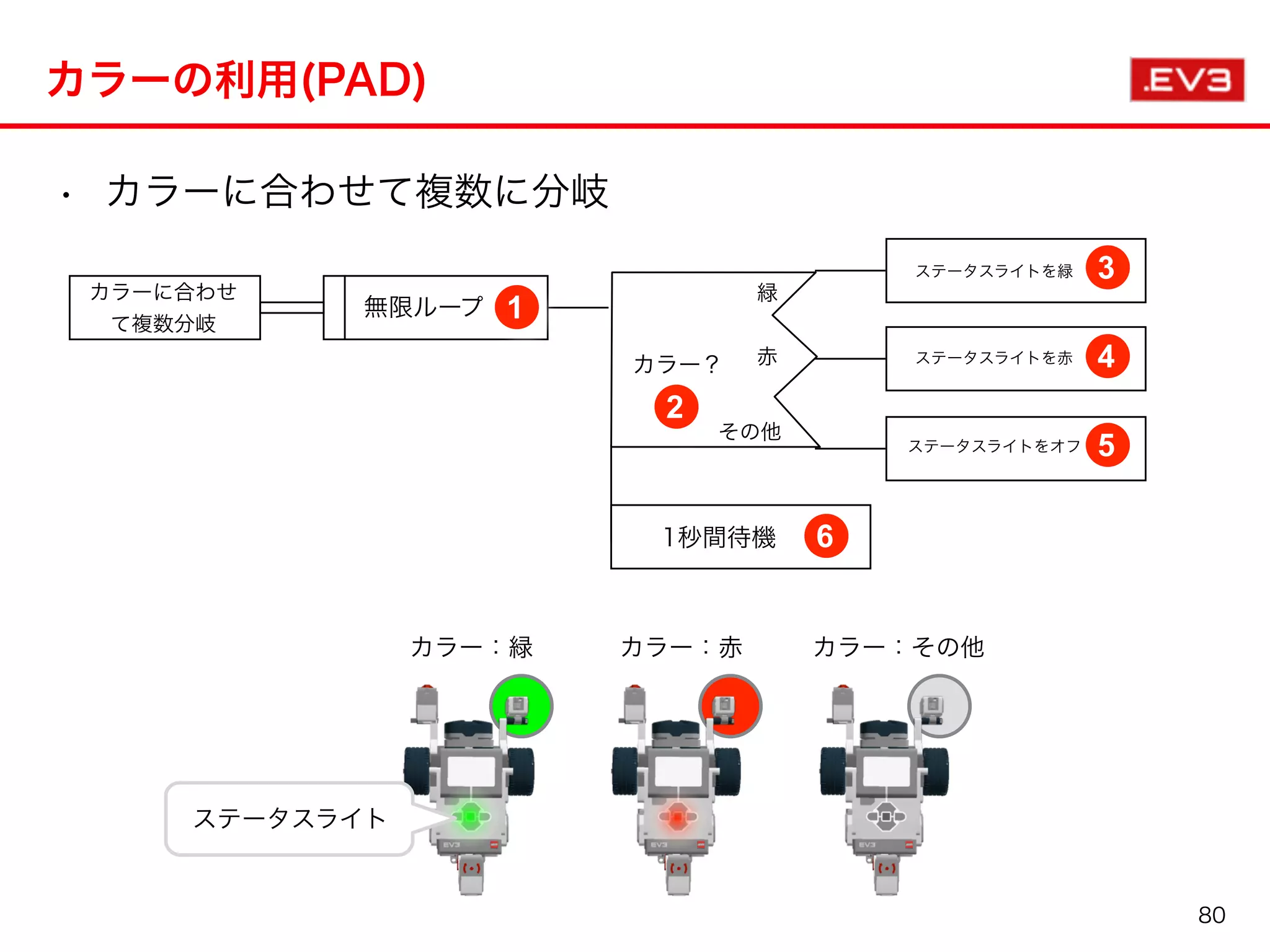
80.
カラーの利用(PAD) • カラーに合わせて複数に分岐 カラー? カラーに合わせ て複数分岐 1 3 無限ループ ステータスライトを赤 6 その他 緑 赤 4 5ステータスライトをオフ ステータスライトを緑 1秒間待機 2 カラー:緑 ステータスライト カラー:赤
カラー:その他 80
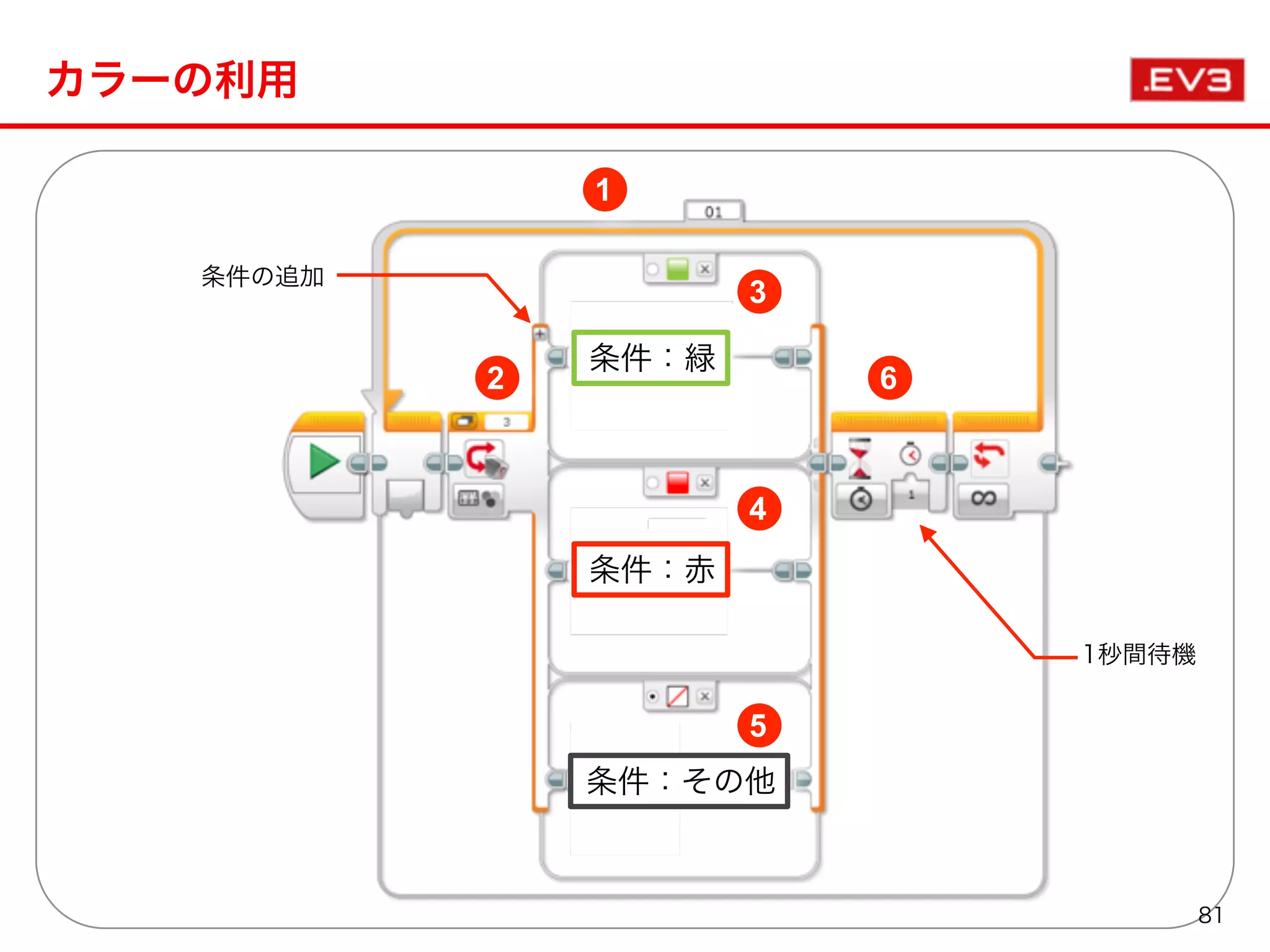
81.
カラーの利用 1 2 3 4 5 6 条件:緑 条件:赤 条件:その他 条件の追加 1秒間待機 81
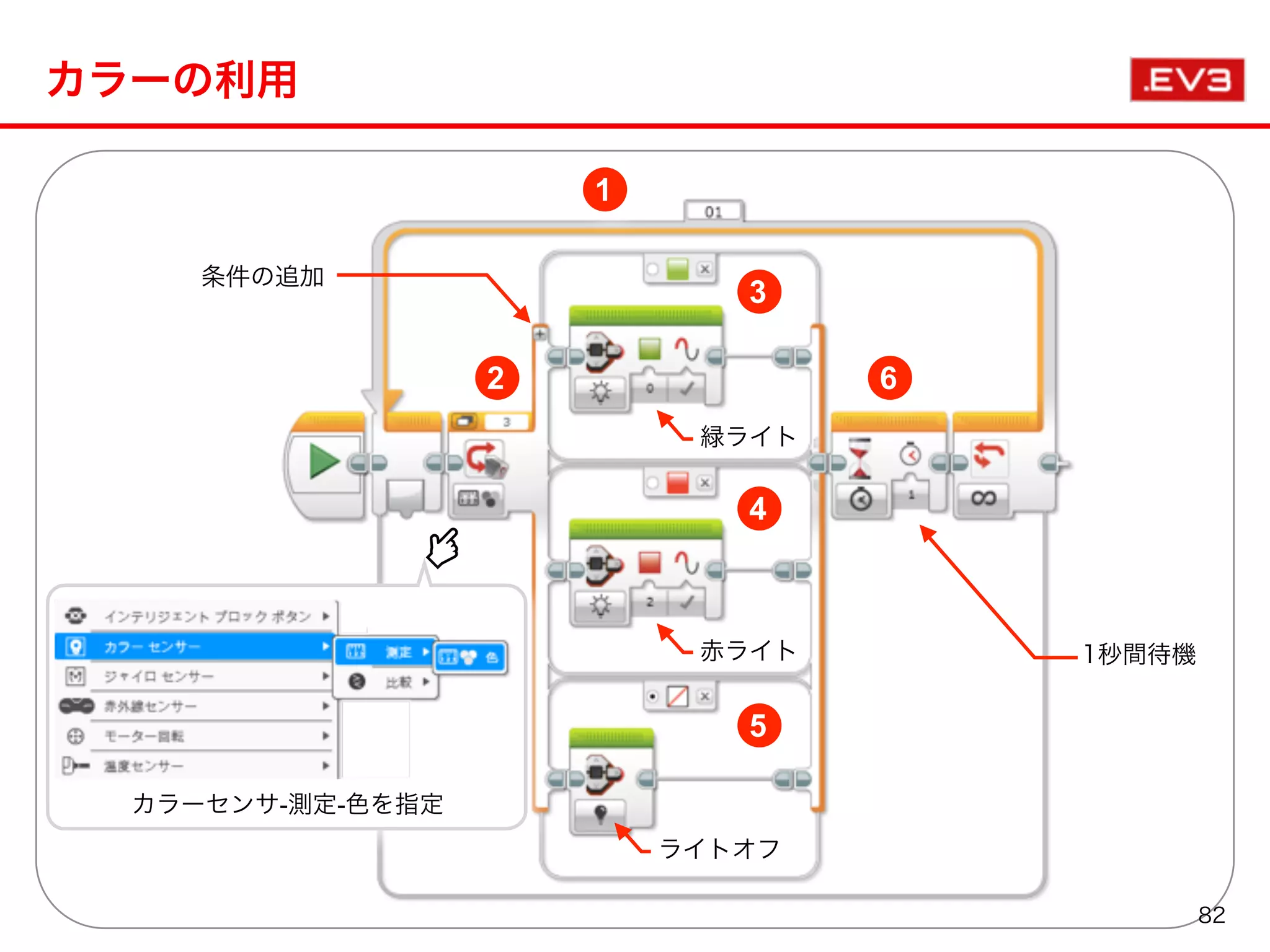
82.
カラーの利用 カラーセンサ-測定-色を指定 1 2 3 4 5 6 条件の追加 緑ライト 赤ライト ライトオフ 1秒間待機 82
83.
■ジャイロセンサを用いたモータ制御 83
84.
ジャイロセンサの原理 ジャイロセンサの測定原理 ジャイロセンサは角速度センサとも呼ばれ、単位時間あたりの回転角 である角速度[degree/s]を計測 ジャイロチップ (InvenSense社)
85.
ジャイロセンサ 85 • EV3のジャイロセンサは一軸の回転角/角速度を計測 回転角 [degree] 角速度
[degree/sec]
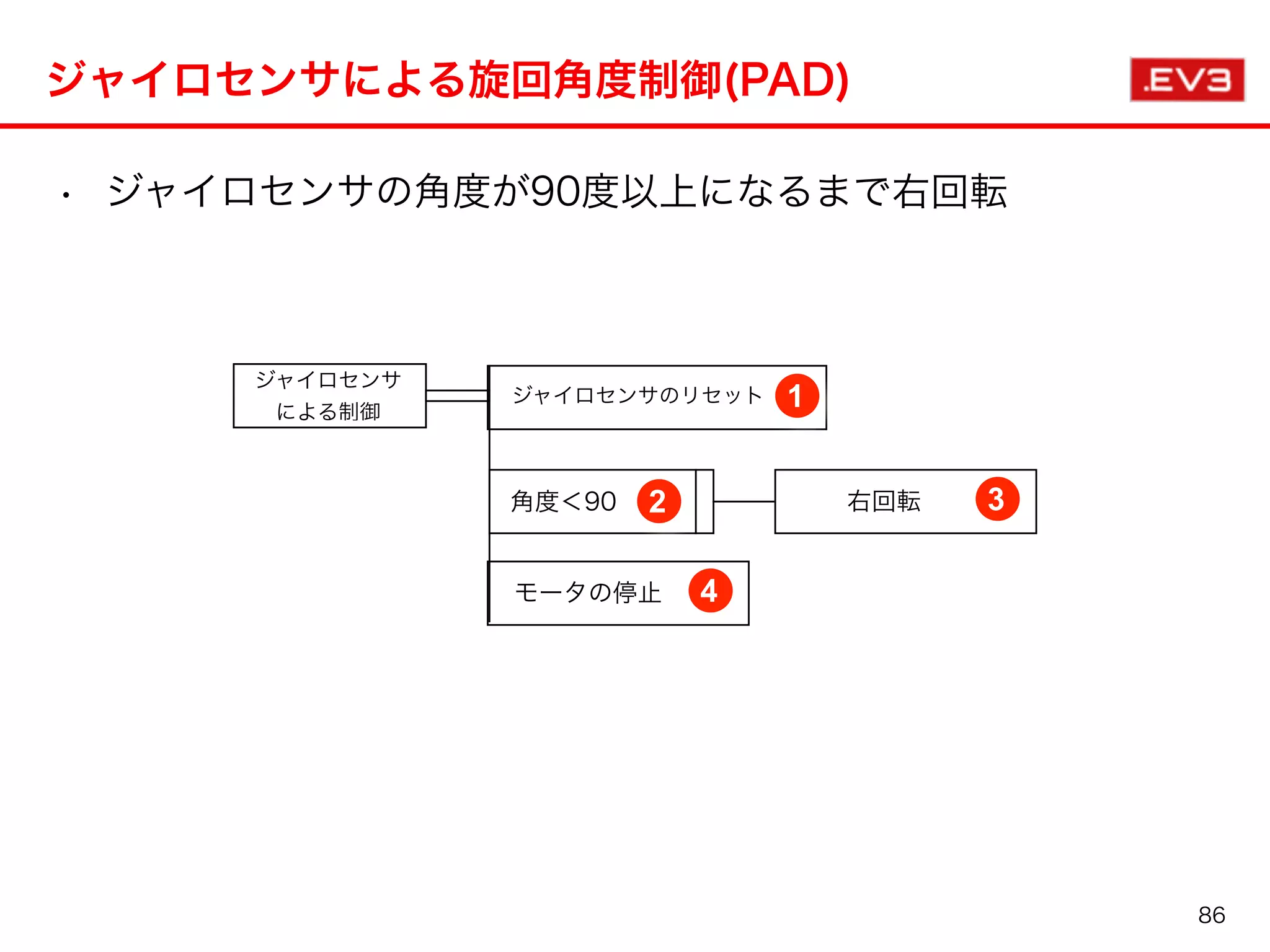
86.
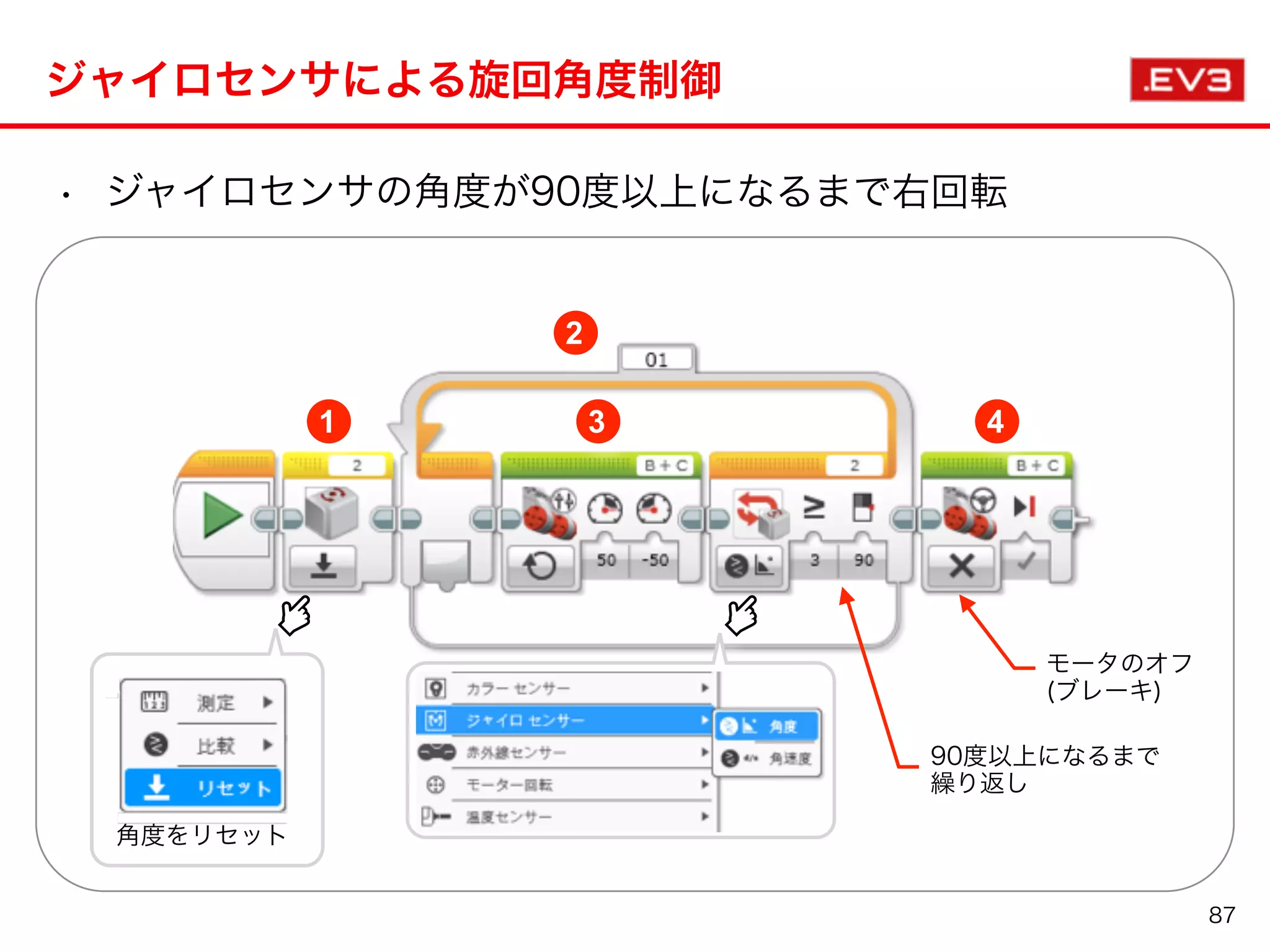
ジャイロセンサによる旋回角度制御(PAD) • ジャイロセンサの角度が90度以上になるまで右回転 86 ジャイロセンサのリセット ジャイロセンサ による制御 2 3角度<90
右回転 4モータの停止 1
87.
ジャイロセンサによる旋回角度制御 87 • ジャイロセンサの角度が90度以上になるまで右回転 角度をリセット 90度以上になるまで 繰り返し モータのオフ (ブレーキ) 1 2 3 4
88.
■マイブロック 88
89.
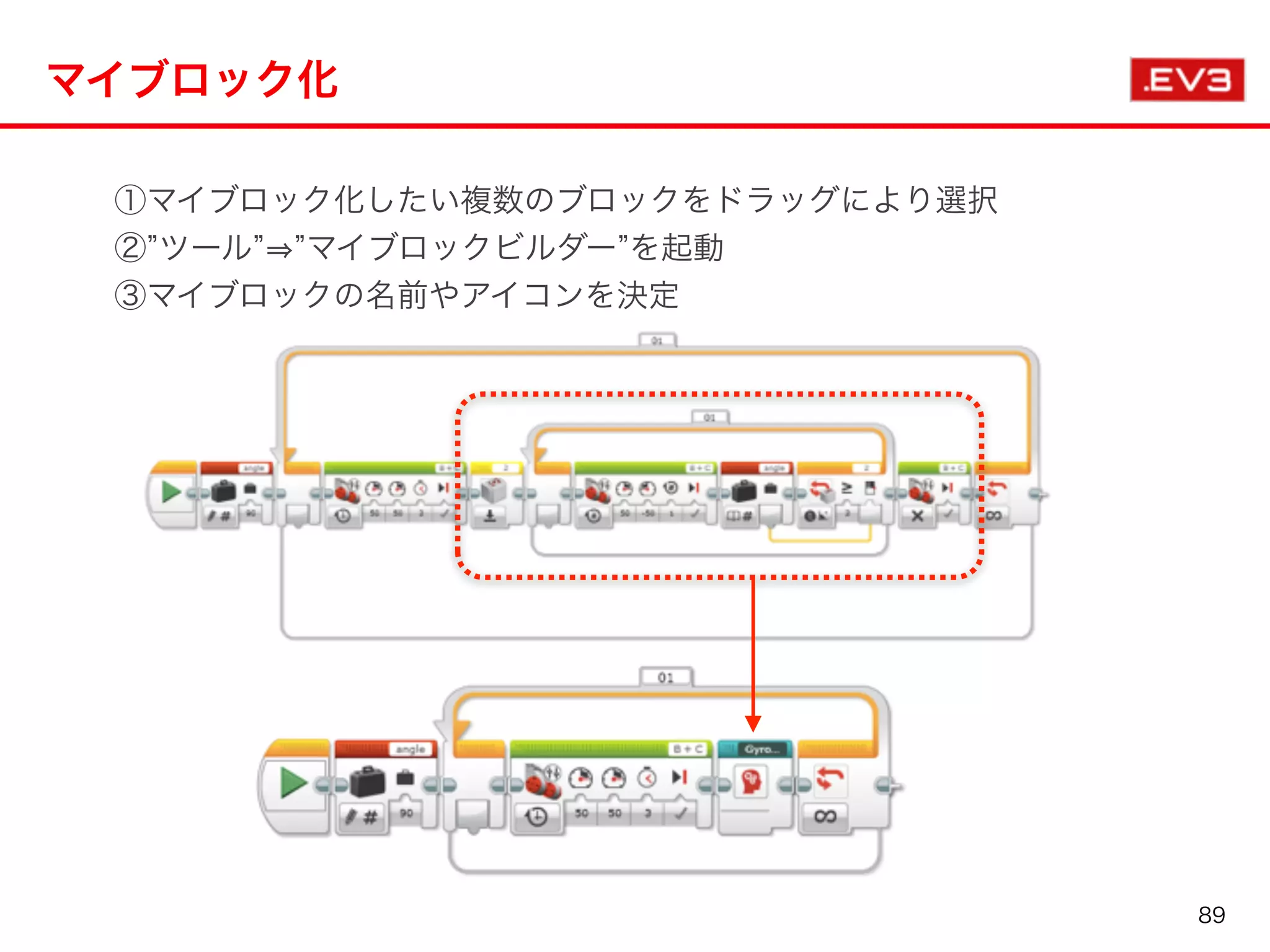
マイブロック化 ①マイブロック化したい複数のブロックをドラッグにより選択 ② ツール マイブロックビルダー
を起動 ③マイブロックの名前やアイコンを決定 89
90.
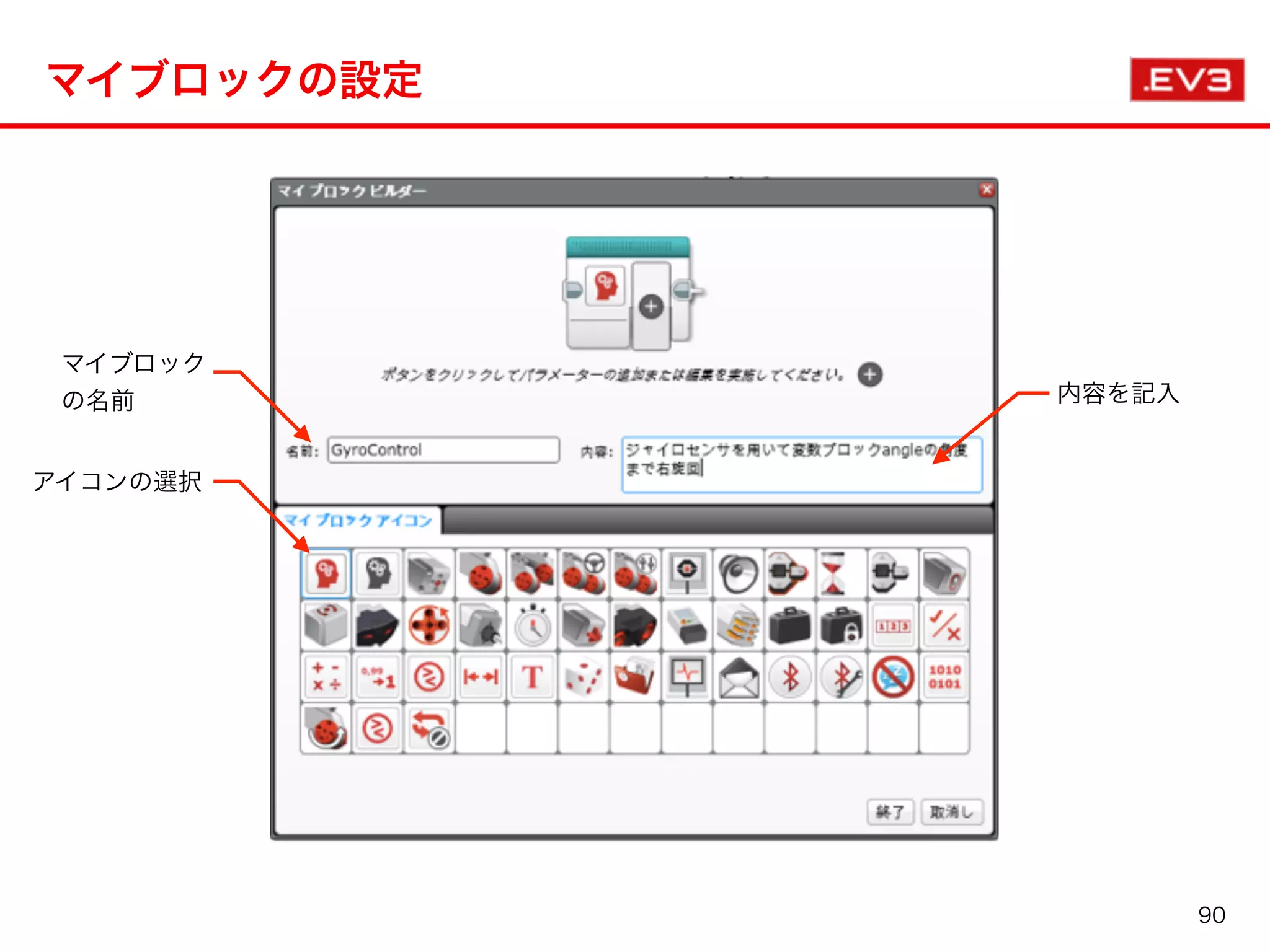
マイブロックの設定 マイブロック の名前 アイコンの選択 内容を記入 90
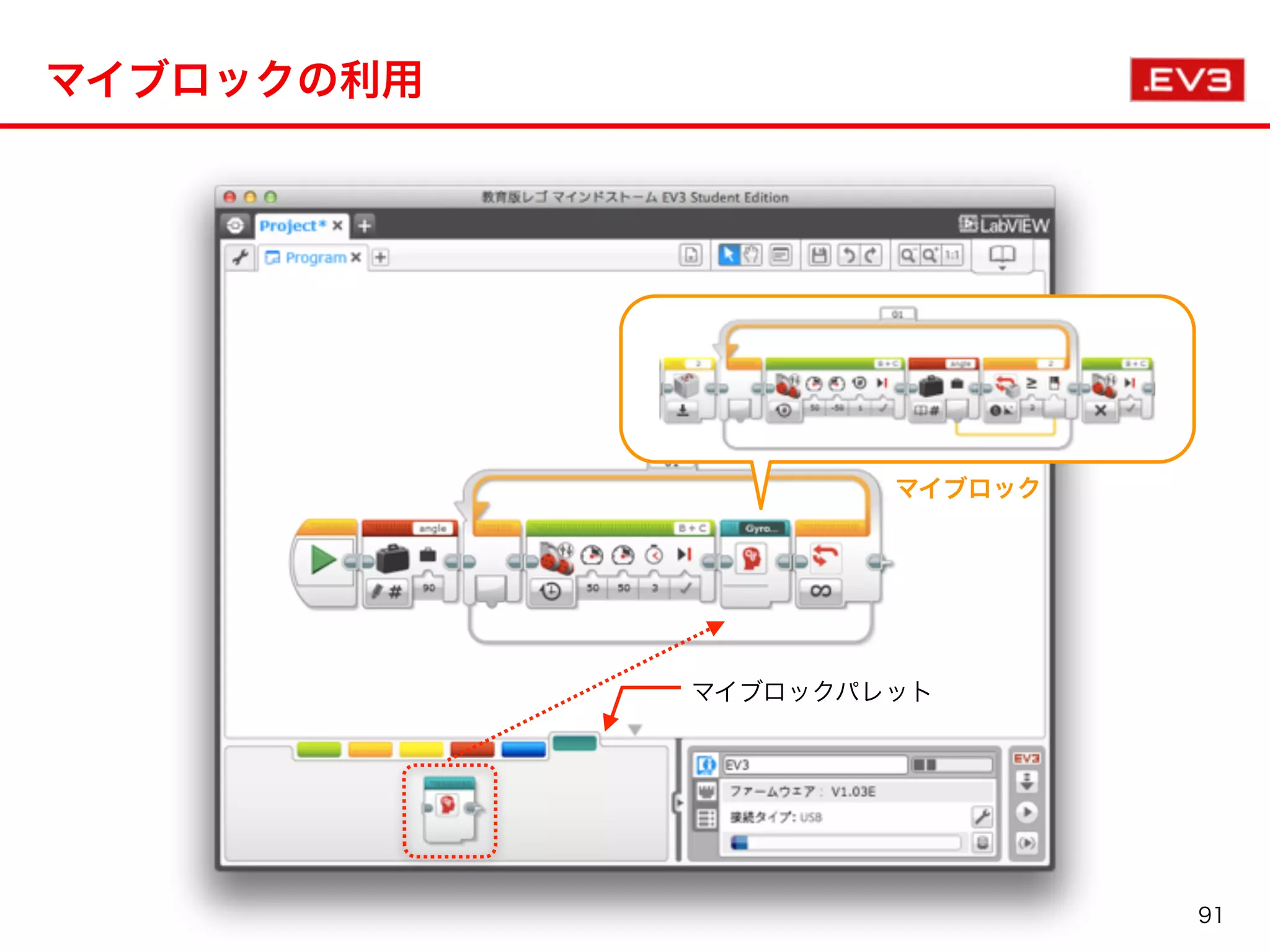
91.
マイブロックの利用 マイブロックパレット 91 マイブロック
92.
■ディスプレイへの表示 92
93.
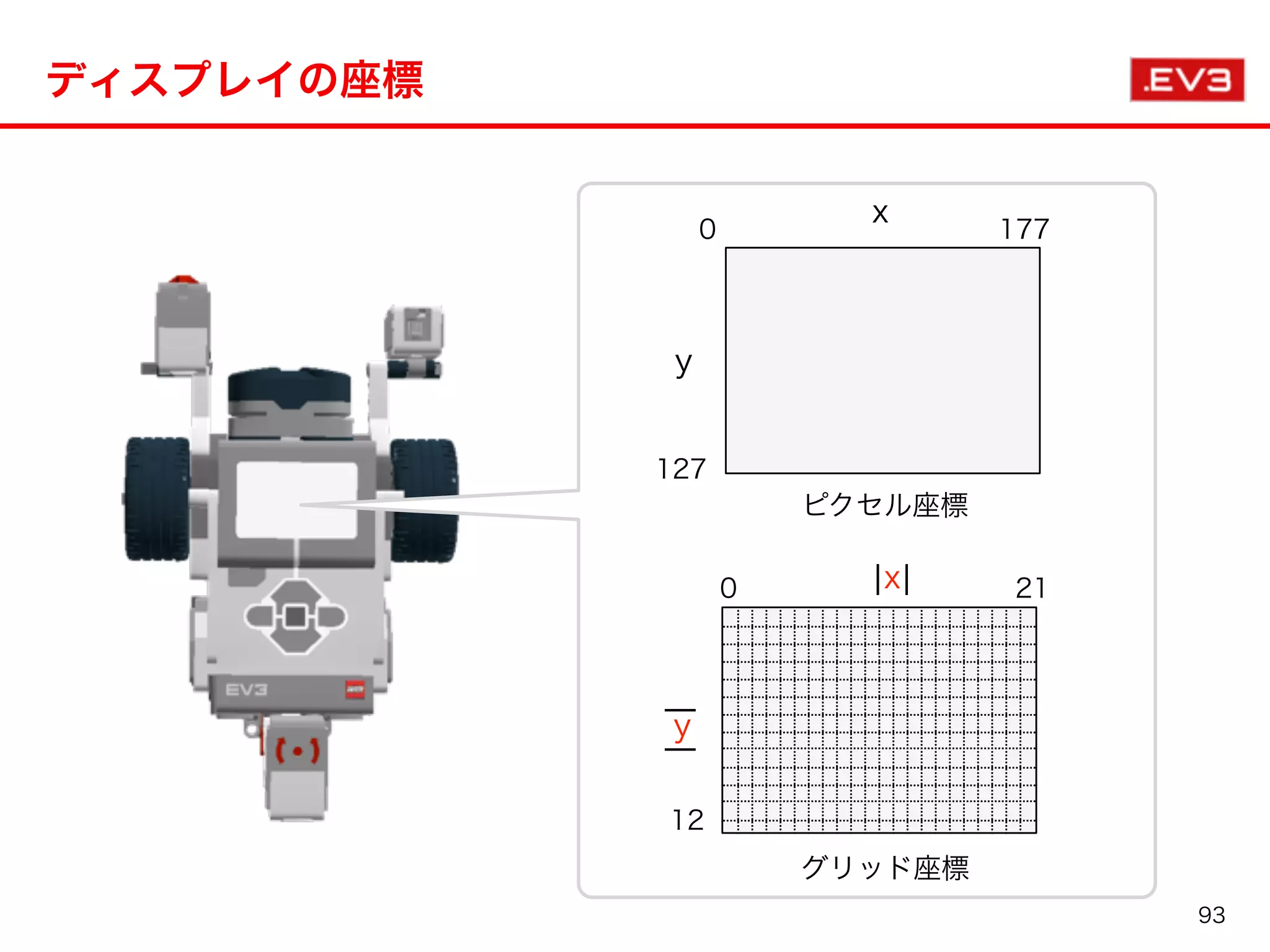
ディスプレイの座標 0 177 127 x y 0 21 12 ¦x¦ グリッド座標 ピクセル座標 y ¦¦ 93
94.
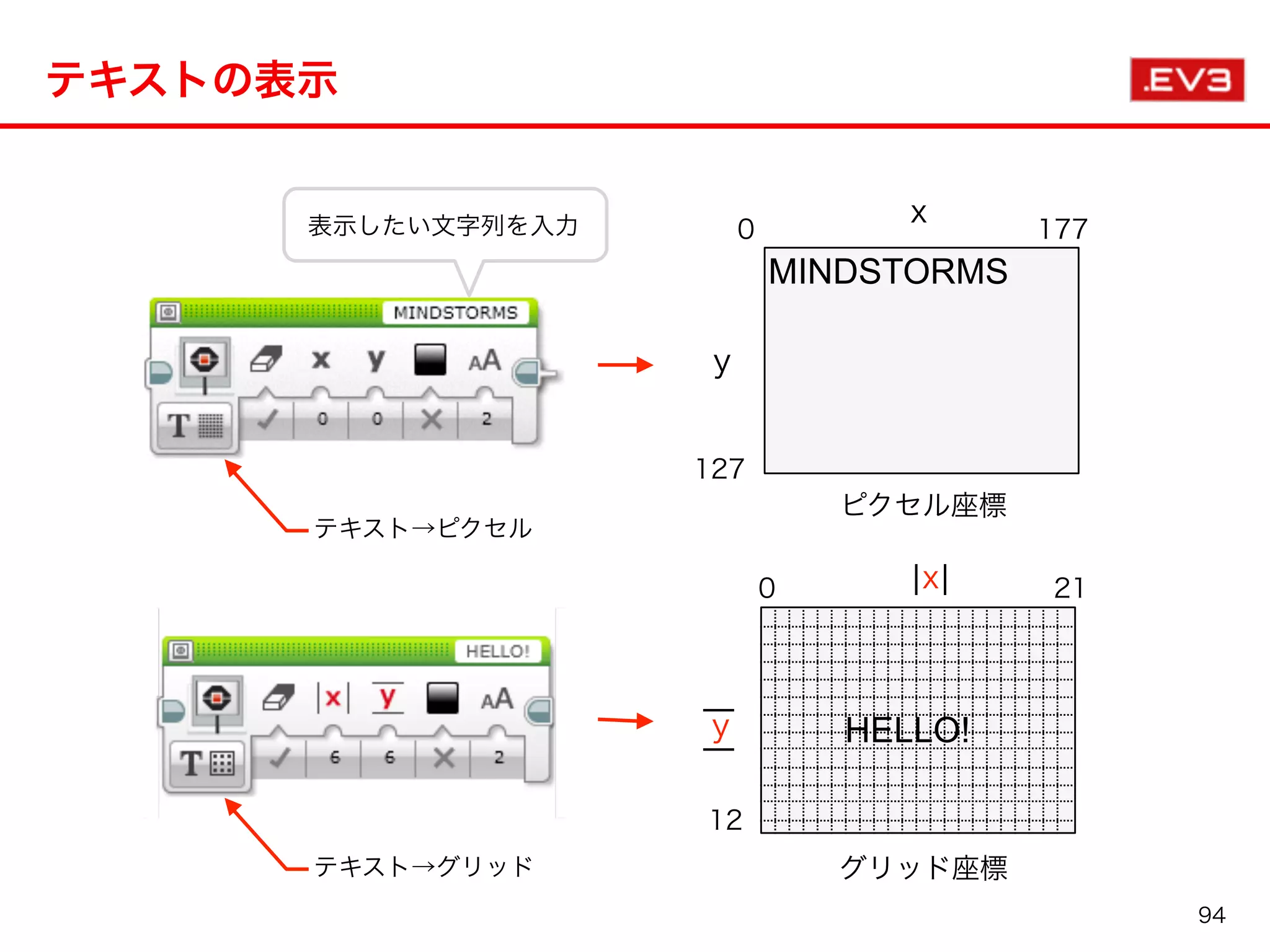
テキストの表示 0 177 127 x y 0 21 12 ¦x¦ グリッド座標 ピクセル座標 MINDSTORMS HELLO! 表示したい文字列を入力 y¦¦ テキスト→ピクセル テキスト→グリッド 94
95.
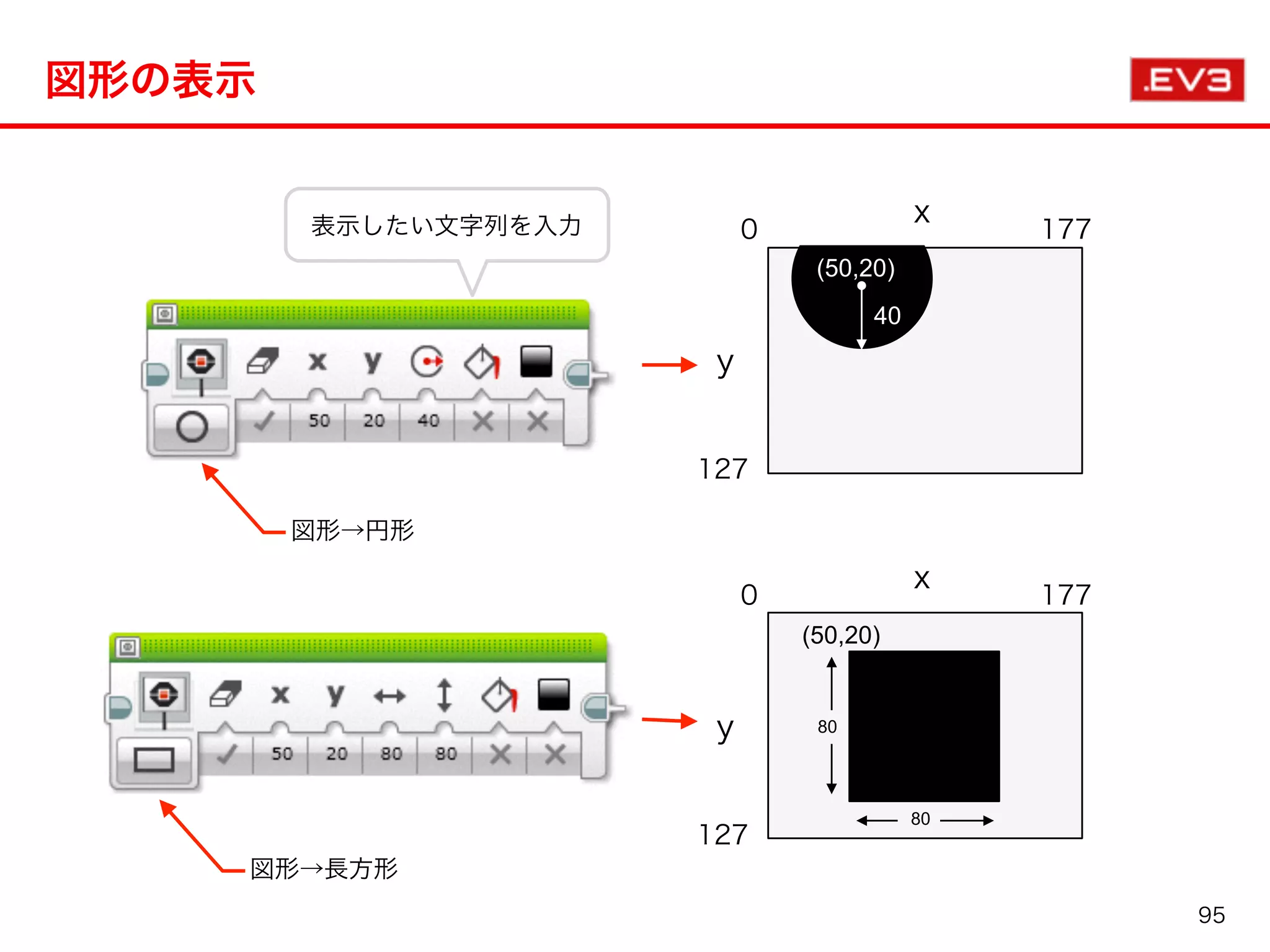
図形の表示 0 177 127 x y 表示したい文字列を入力 図形→円形 図形→長方形 0 177 127 x y (50,20) (50,20) 40 80 80 95
96.
• 超音波センサの値を液晶ディスプレイに表示 ‒ デバッグに重要 超音波センサの値を表示 96
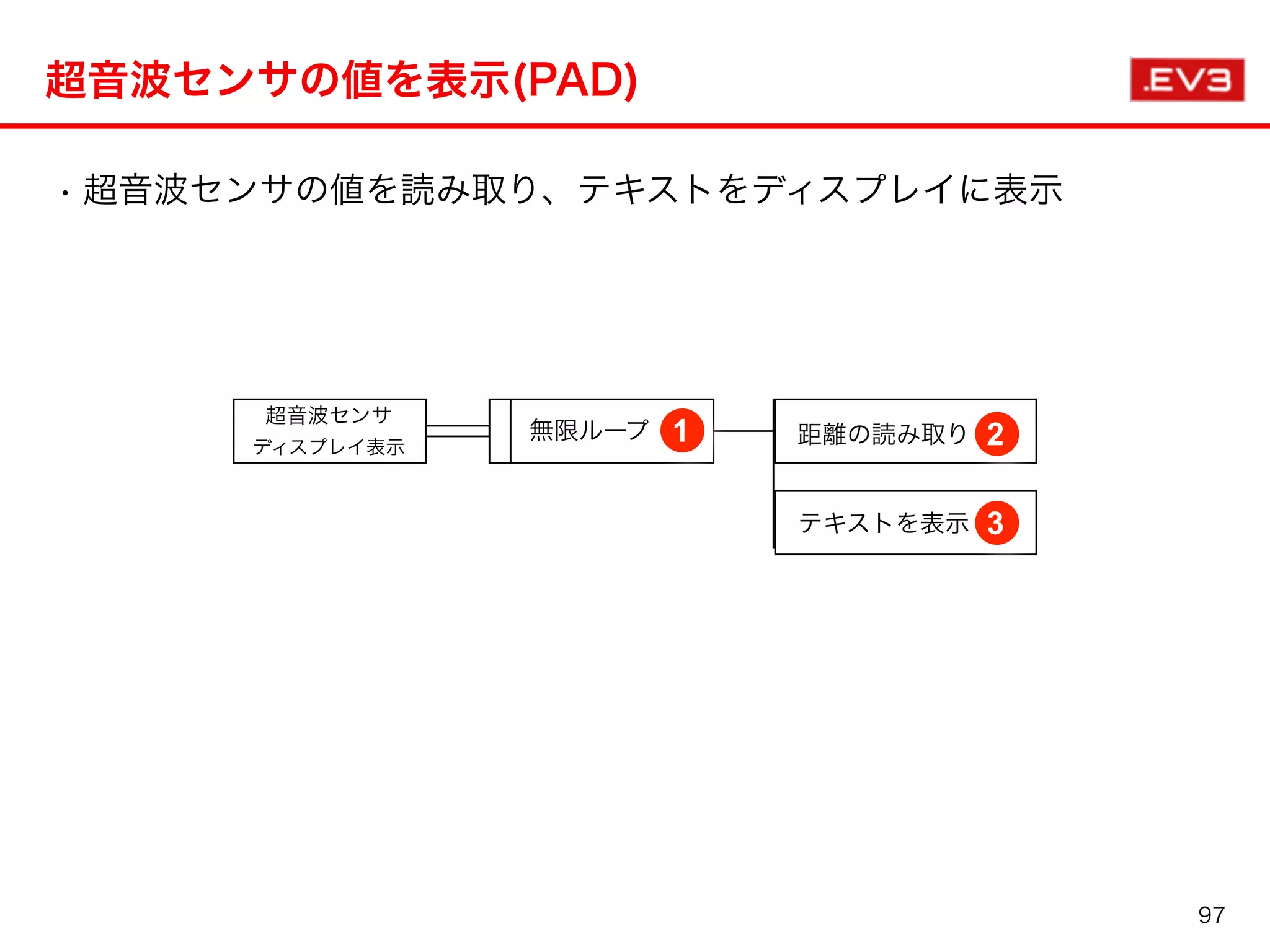
97.
• 超音波センサの値を読み取り、テキストをディスプレイに表示 超音波センサの値を表示(PAD) 距離の読み取り 2 超音波センサ ディスプレイ表示 1無限ループ テキストを表示
3 97
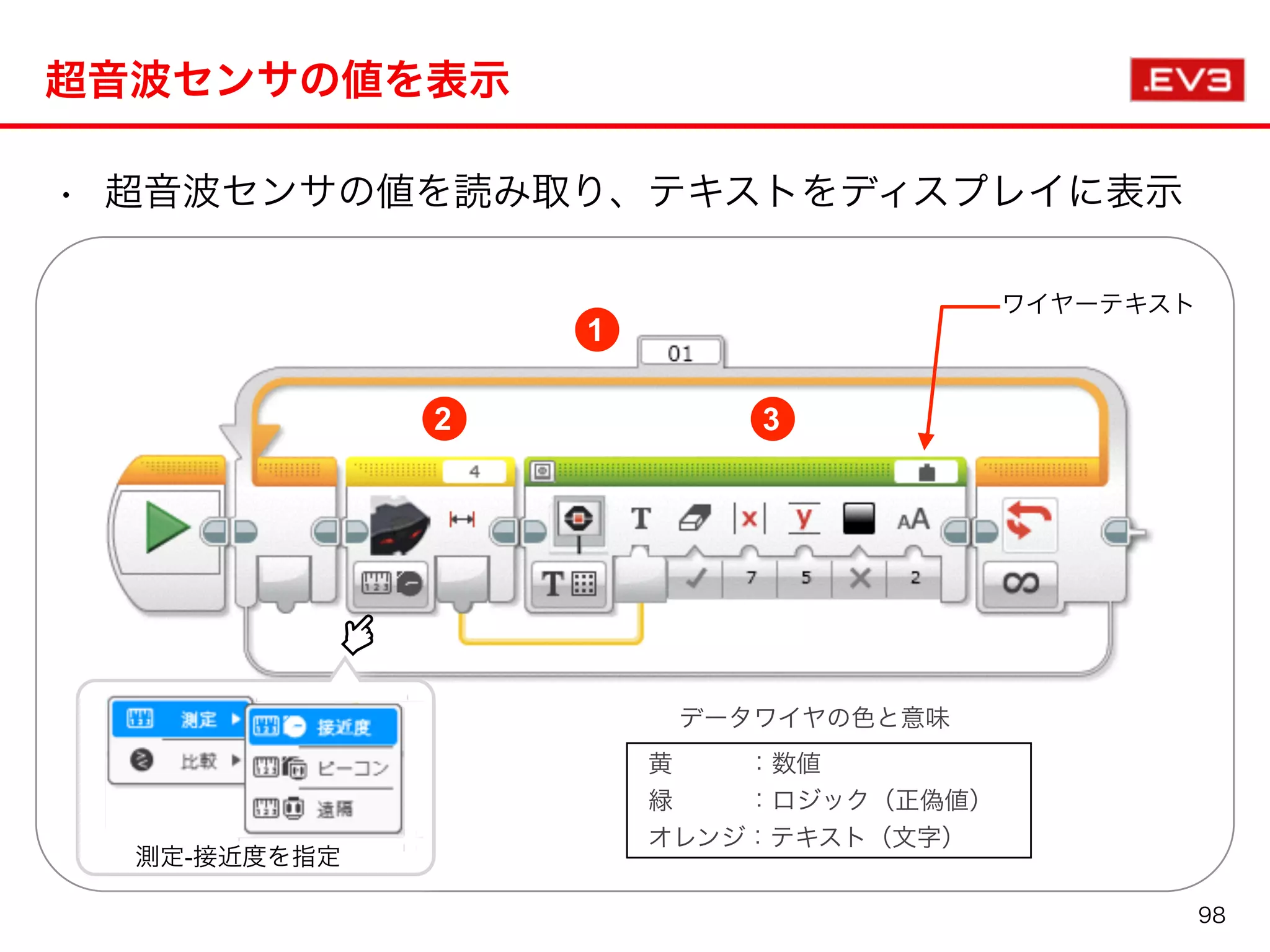
98.
• 超音波センサの値を読み取り、テキストをディスプレイに表示 超音波センサの値を表示 1 2 3 測定-接近度を指定 ワイヤーテキスト 黄 :数値 緑 :ロジック(正偽値) オレンジ:テキスト(文字) データワイヤの色と意味 98
99.
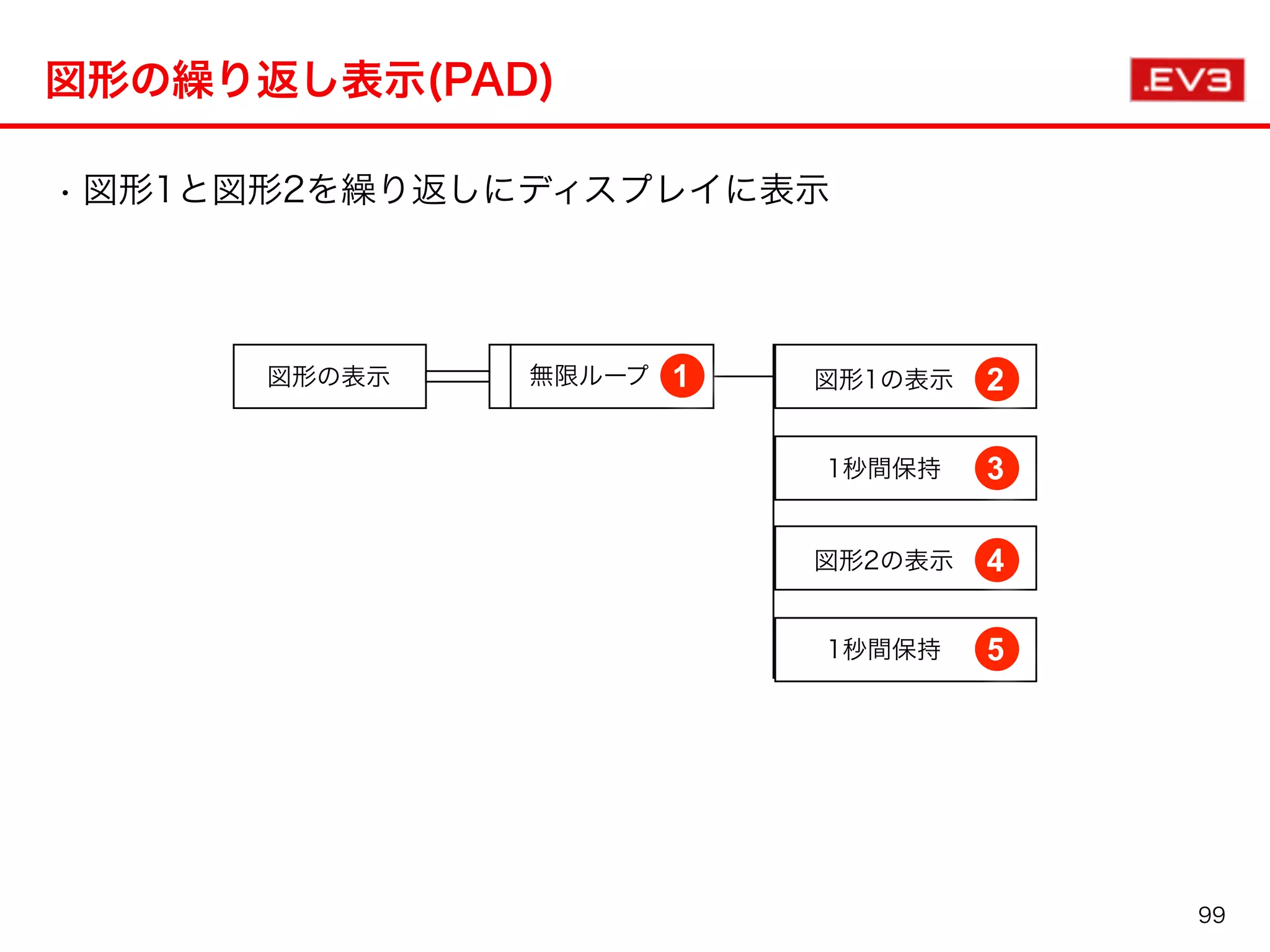
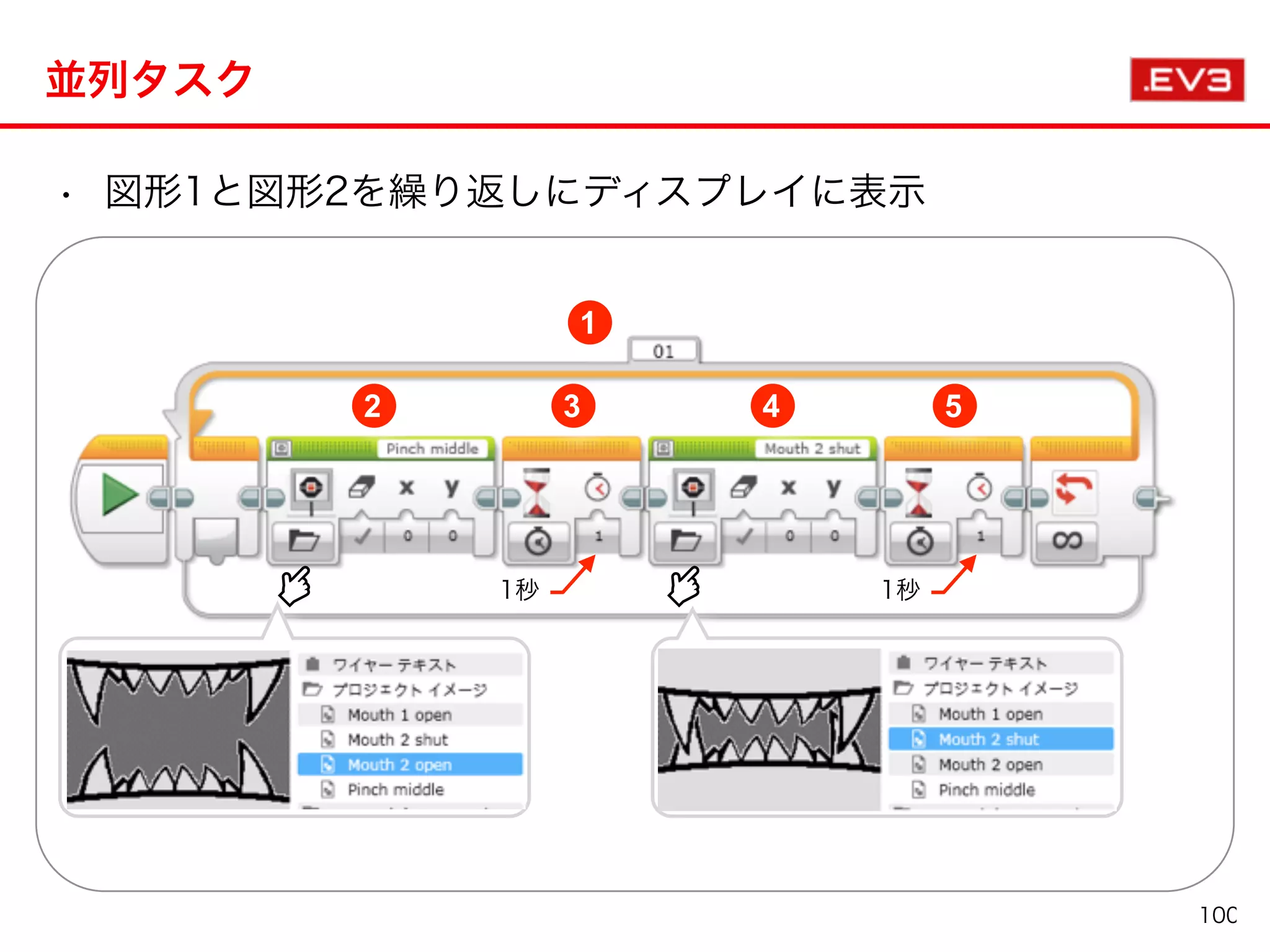
図形の繰り返し表示(PAD) • 図形1と図形2を繰り返しにディスプレイに表示 図形1の表示 2図形の表示
1無限ループ 1秒間保持 3 図形2の表示 4 1秒間保持 5 99
100.
• 図形1と図形2を繰り返しにディスプレイに表示 並列タスク 1 2 4 1秒
1秒 3 5 100
101.
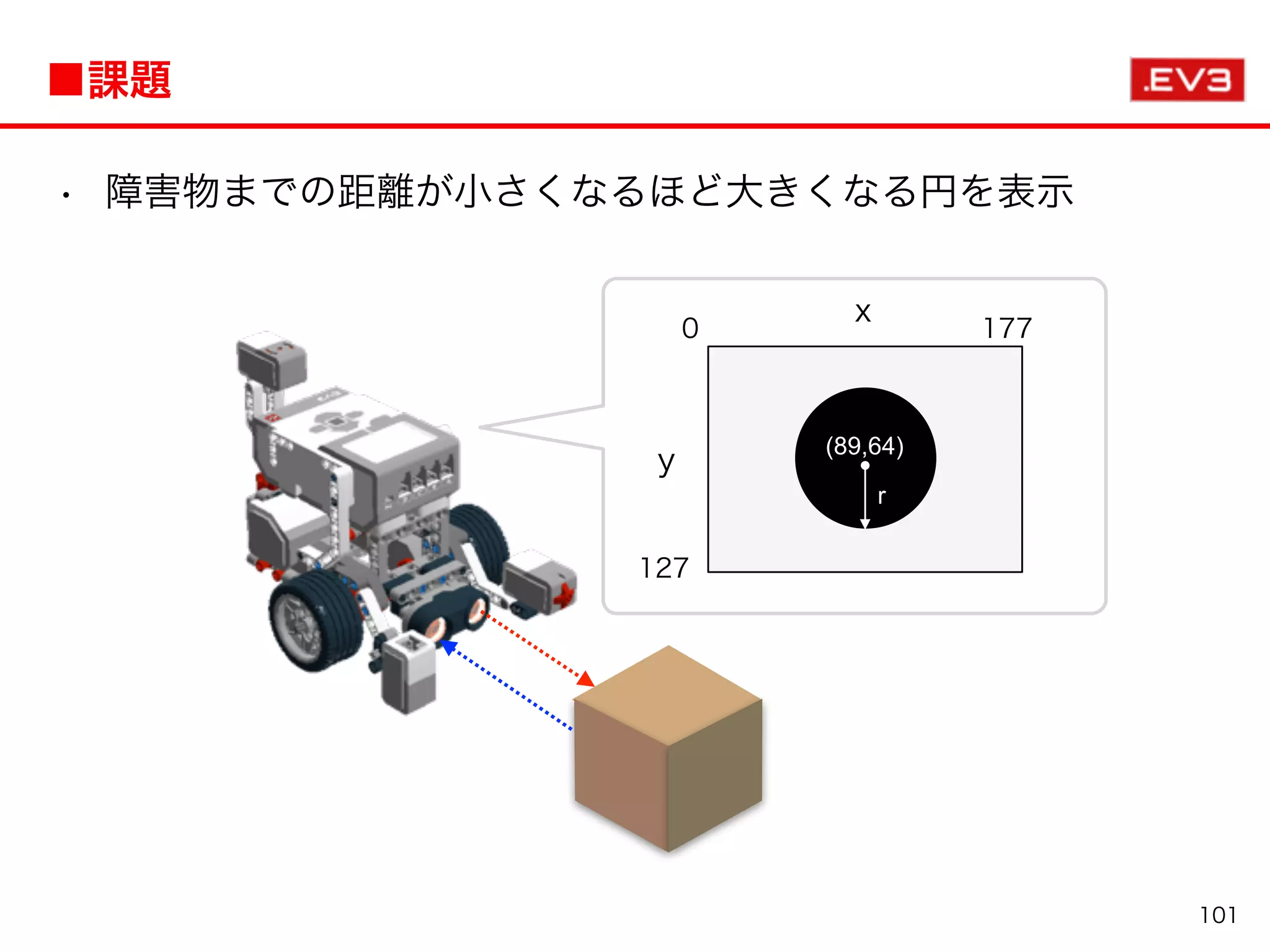
• 障害物までの距離が小さくなるほど大きくなる円を表示 ■課題 0 177 127 x y (89,64) r 101
102.
■並列タスク 102
103.
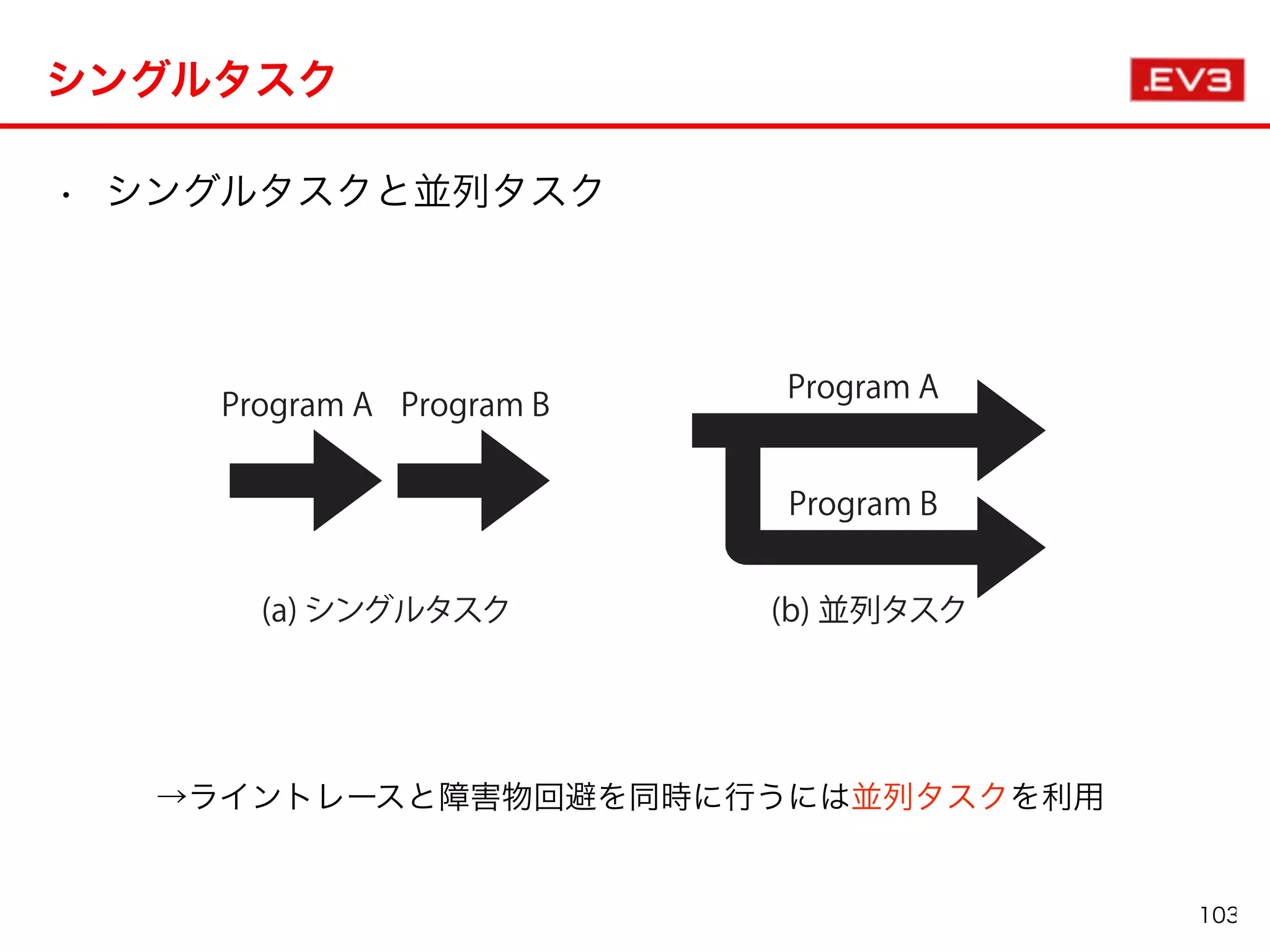
• シングルタスクと並列タスク シングルタスク →ライントレースと障害物回避を同時に行うには並列タスクを利用 103
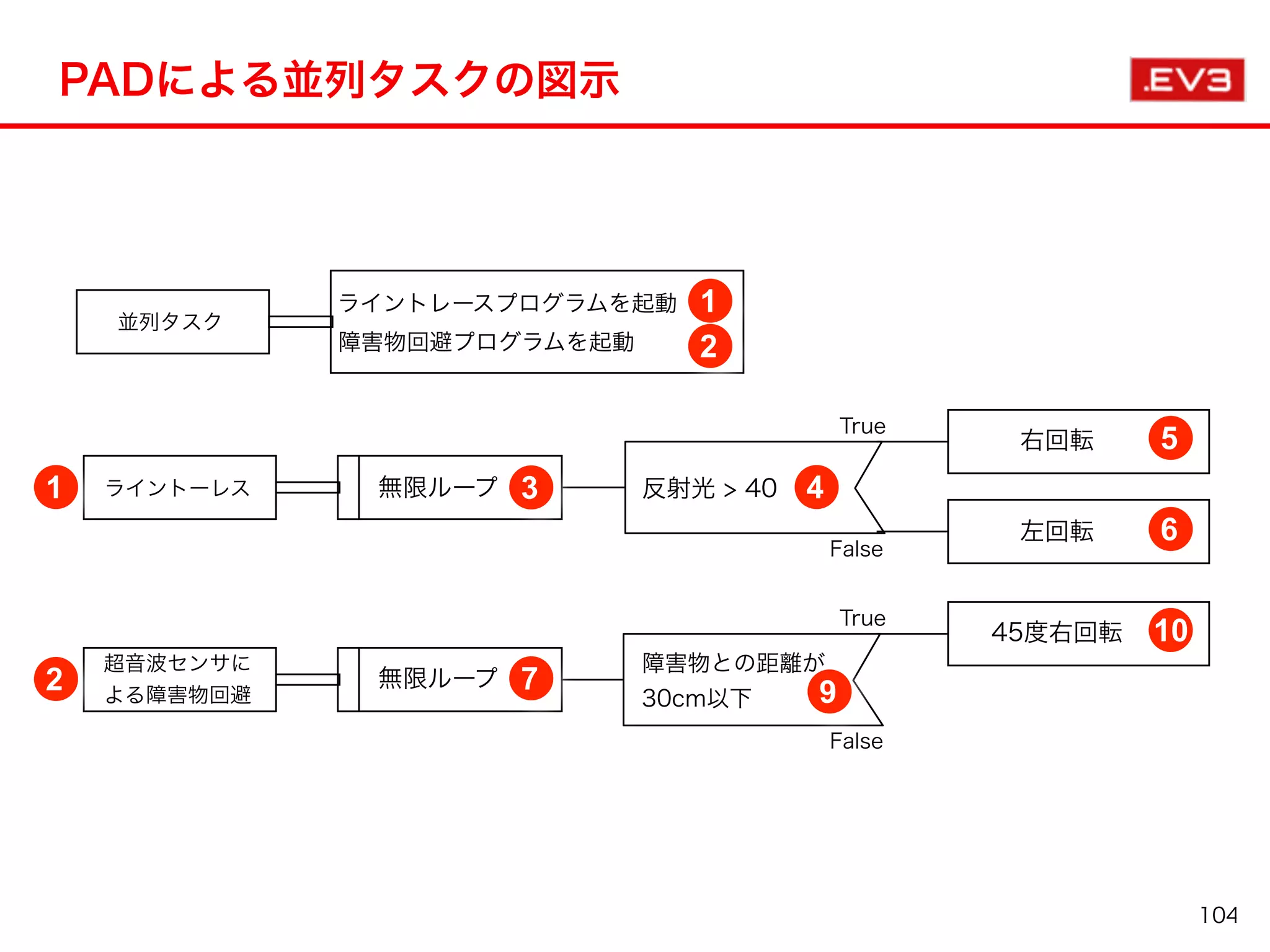
104.
PADによる並列タスクの図示 反射光 > 40ライントーレス
3 5 無限ループ 右回転 4 True False 6左回転 1 並列タスク ライントレースプログラムを起動 2障害物回避プログラムを起動 1 障害物との距離が 30cm以下 超音波センサに よる障害物回避 7 10 無限ループ 45度右回転 9 True False 2 104
105.
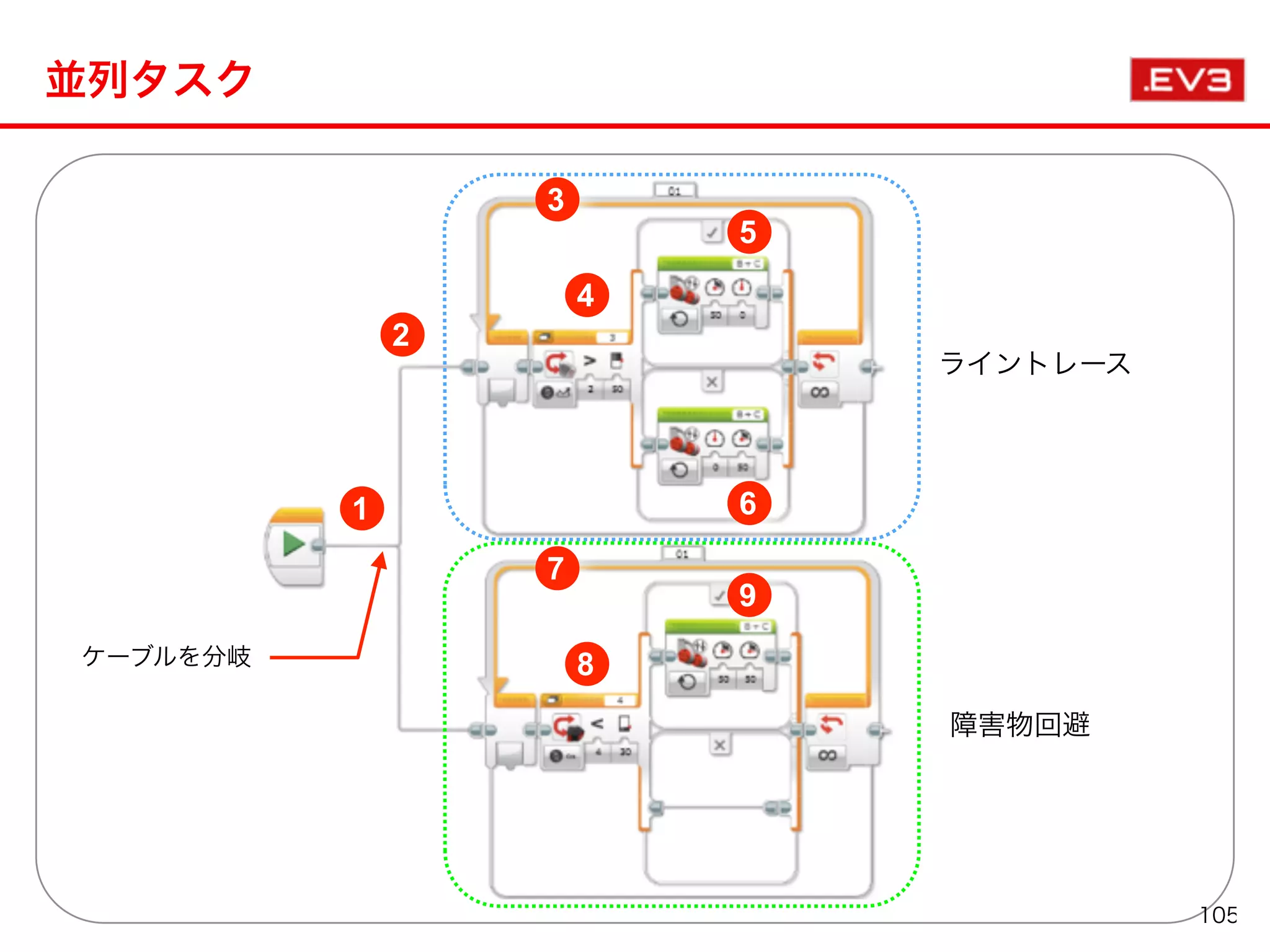
1 並列タスク 2 4 3 5 6 7 8 9 ライントレース 障害物回避 ケーブルを分岐 105
106.
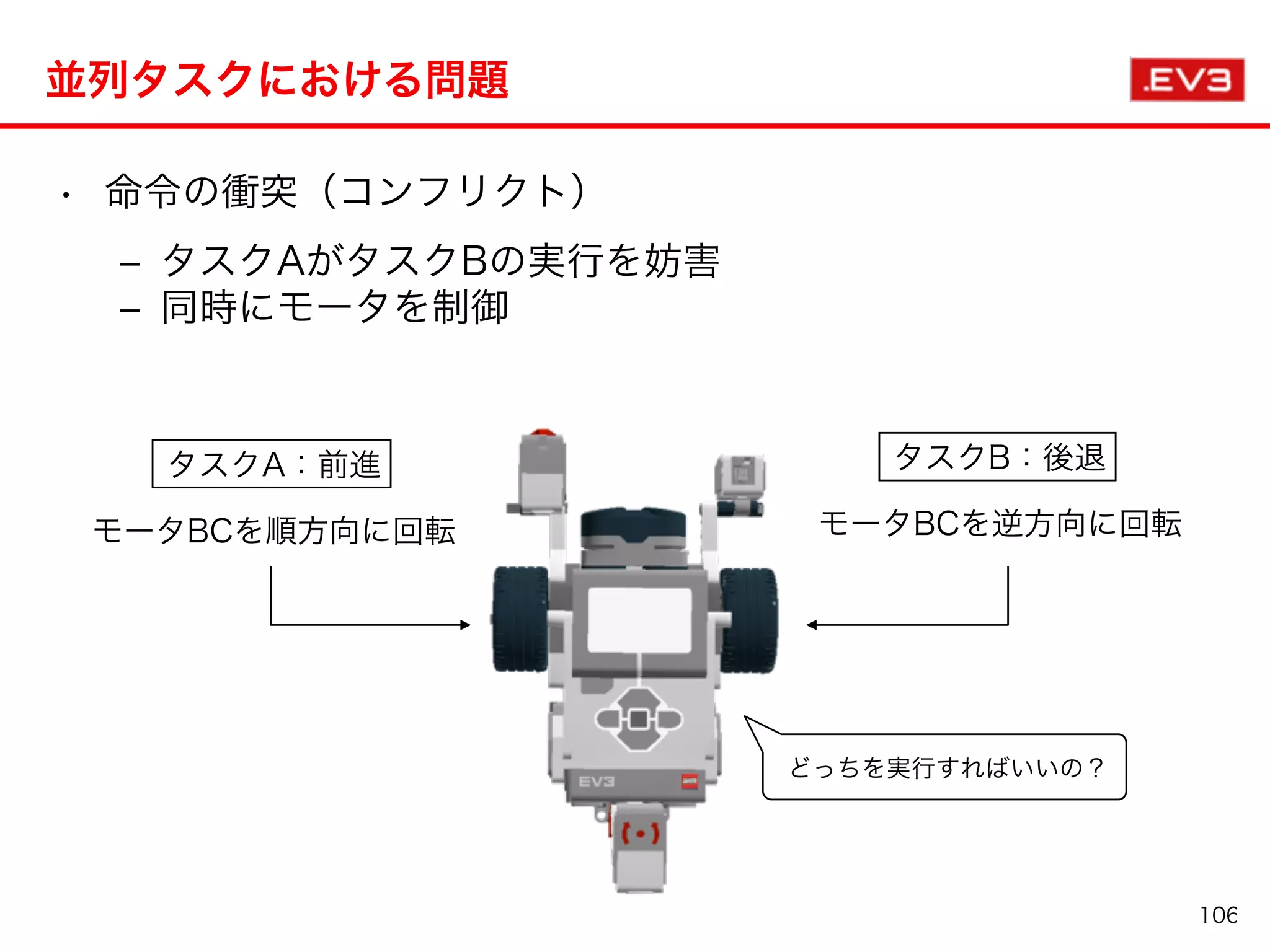
並列タスクにおける問題 • 命令の衝突(コンフリクト) ‒ タスクAがタスクBの実行を妨害 ‒
同時にモータを制御 タスクA:前進 モータBCを順方向に回転 タスクB:後退 モータBCを逆方向に回転 どっちを実行すればいいの? 106
107.
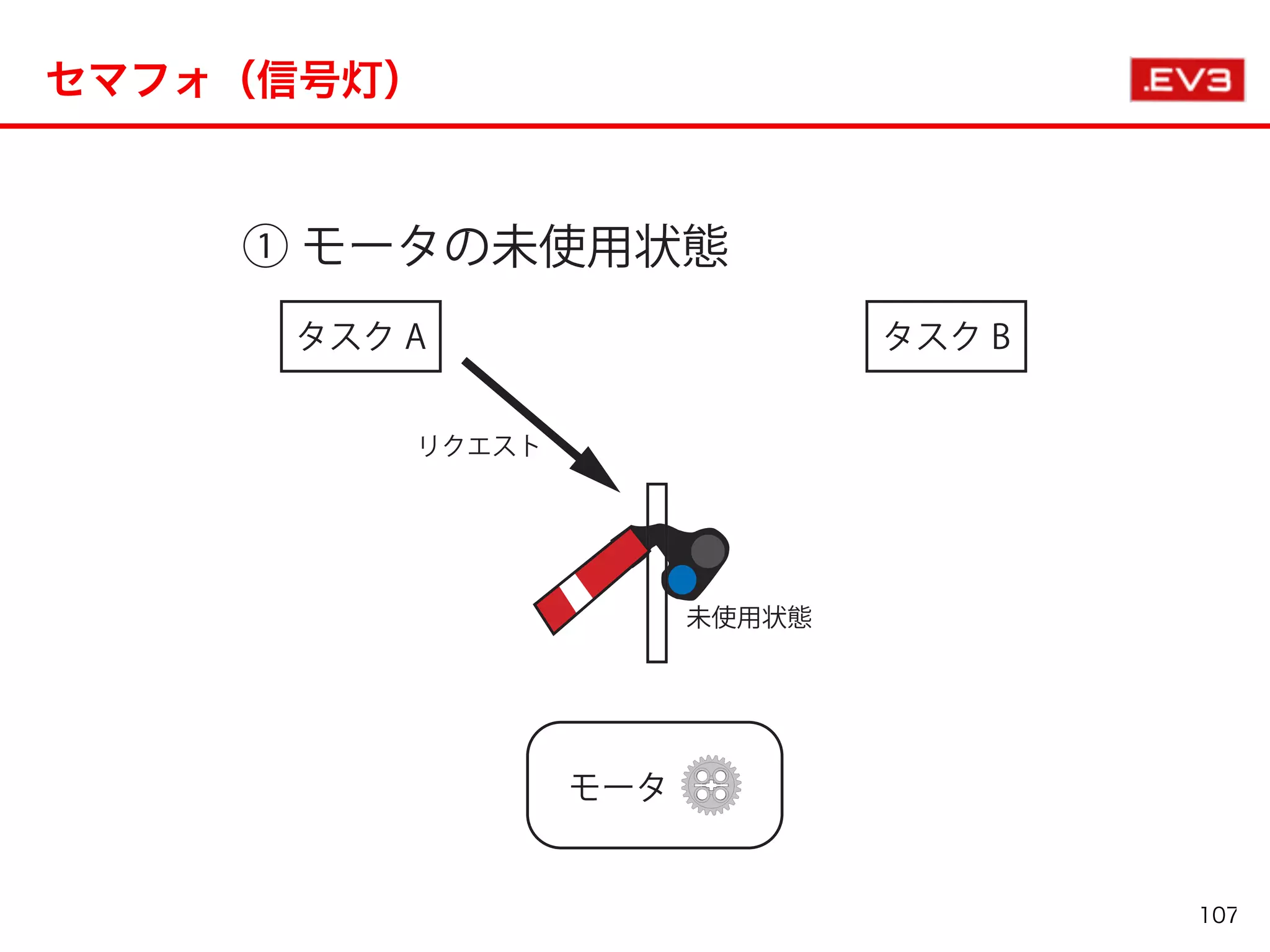
セマフォ(信号灯) 107
108.
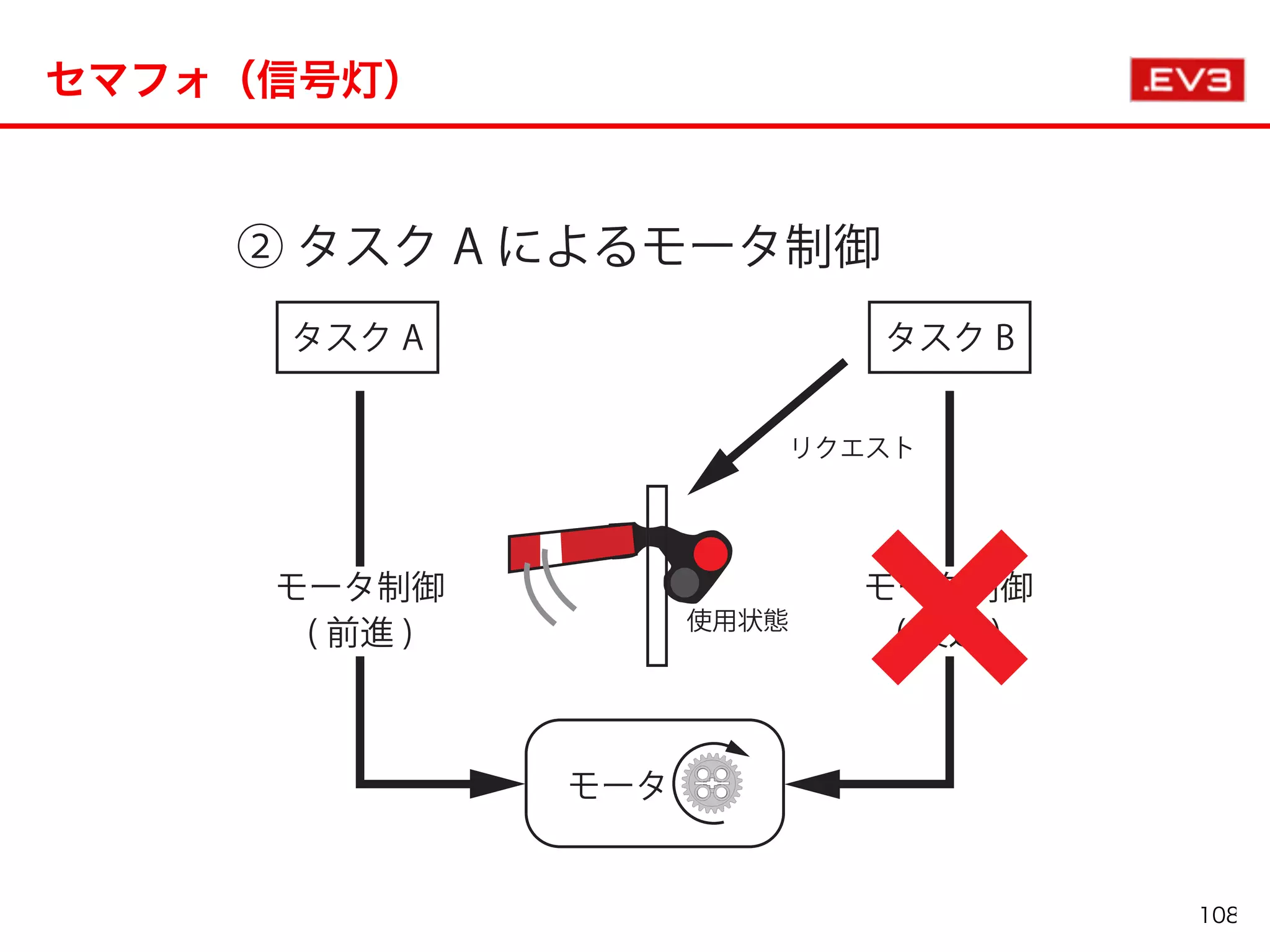
セマフォ(信号灯) 108
109.
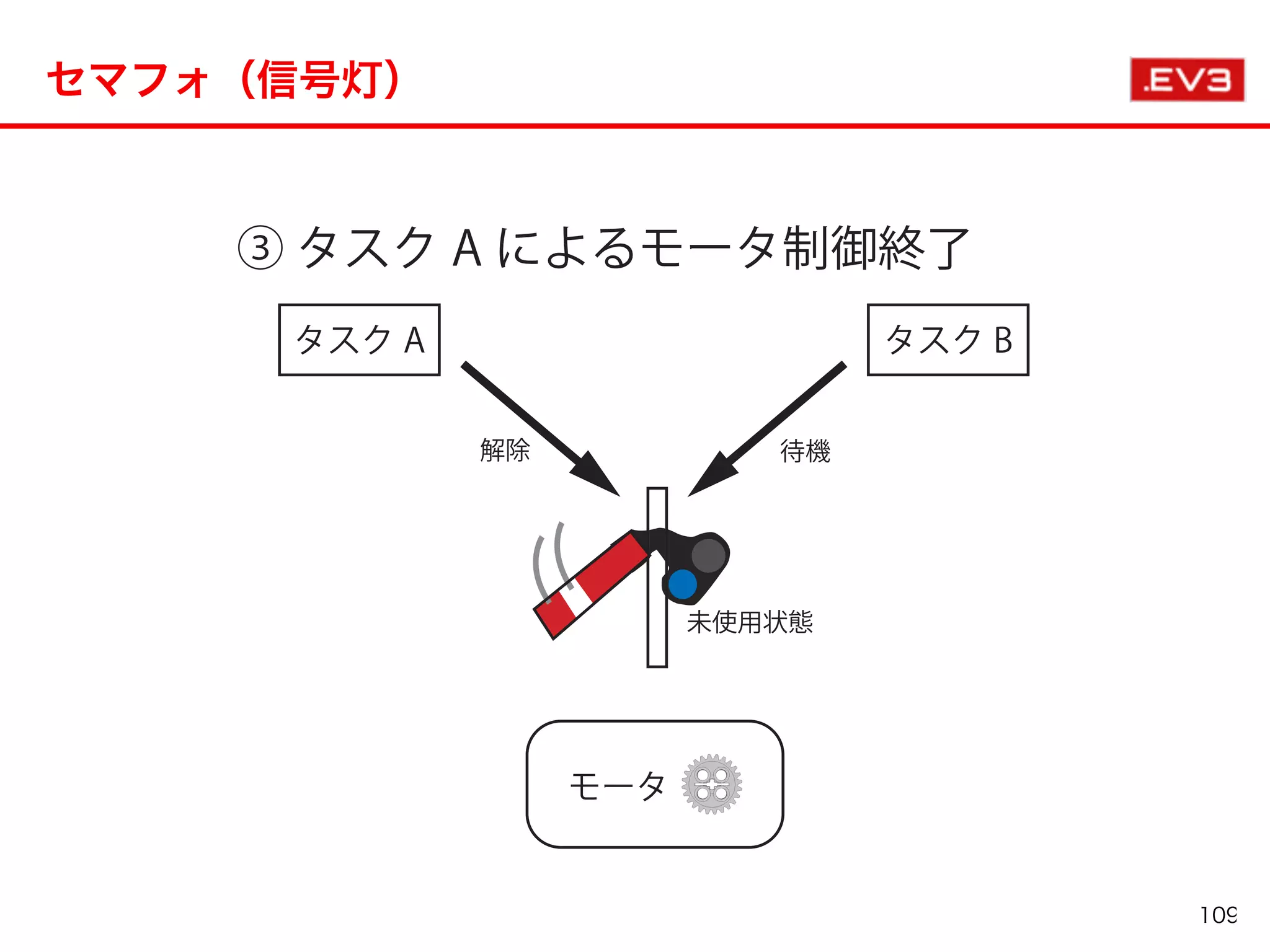
セマフォ(信号灯) 109
110.
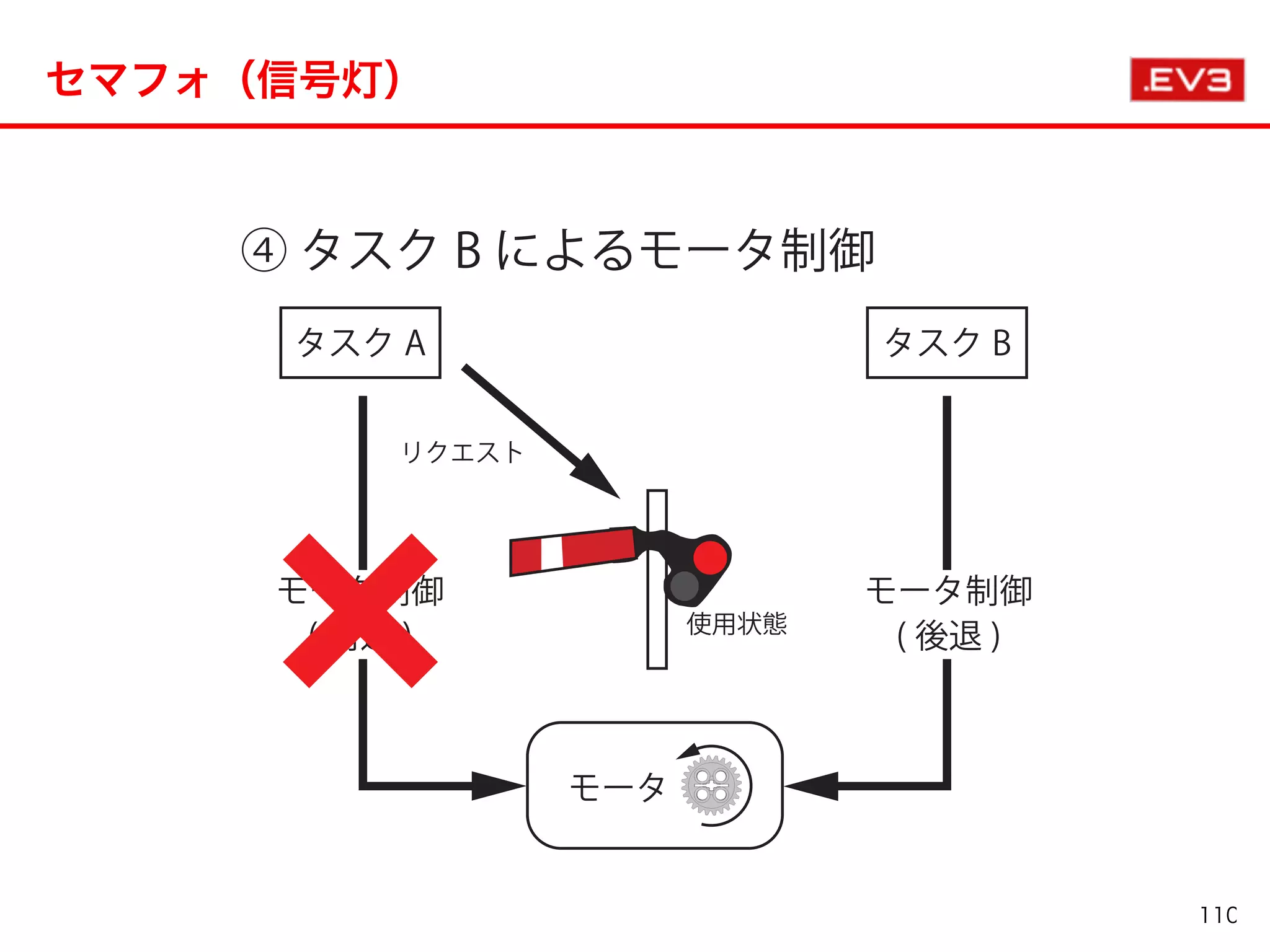
セマフォ(信号灯) 110
111.
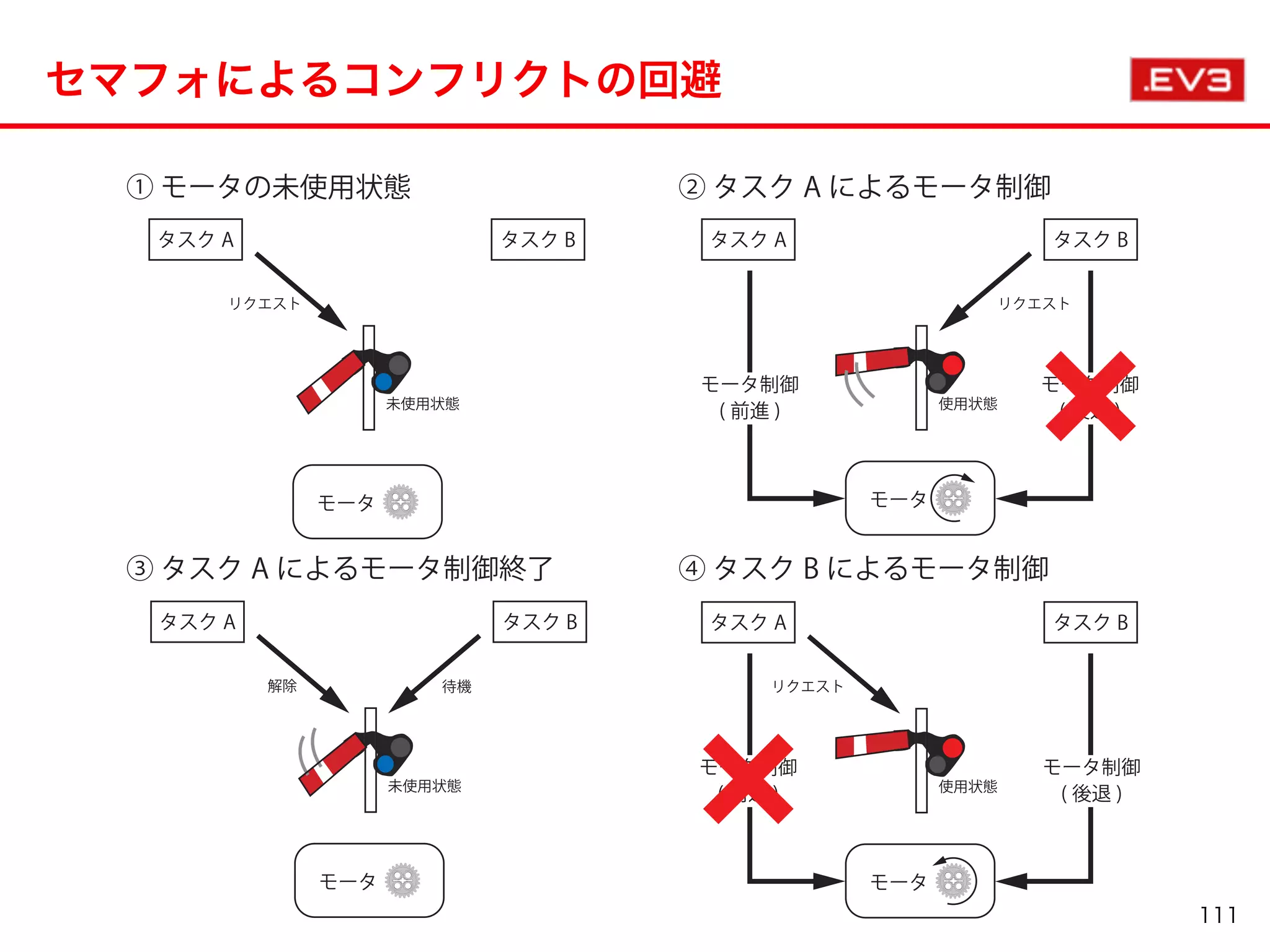
セマフォによるコンフリクトの回避 111
112.
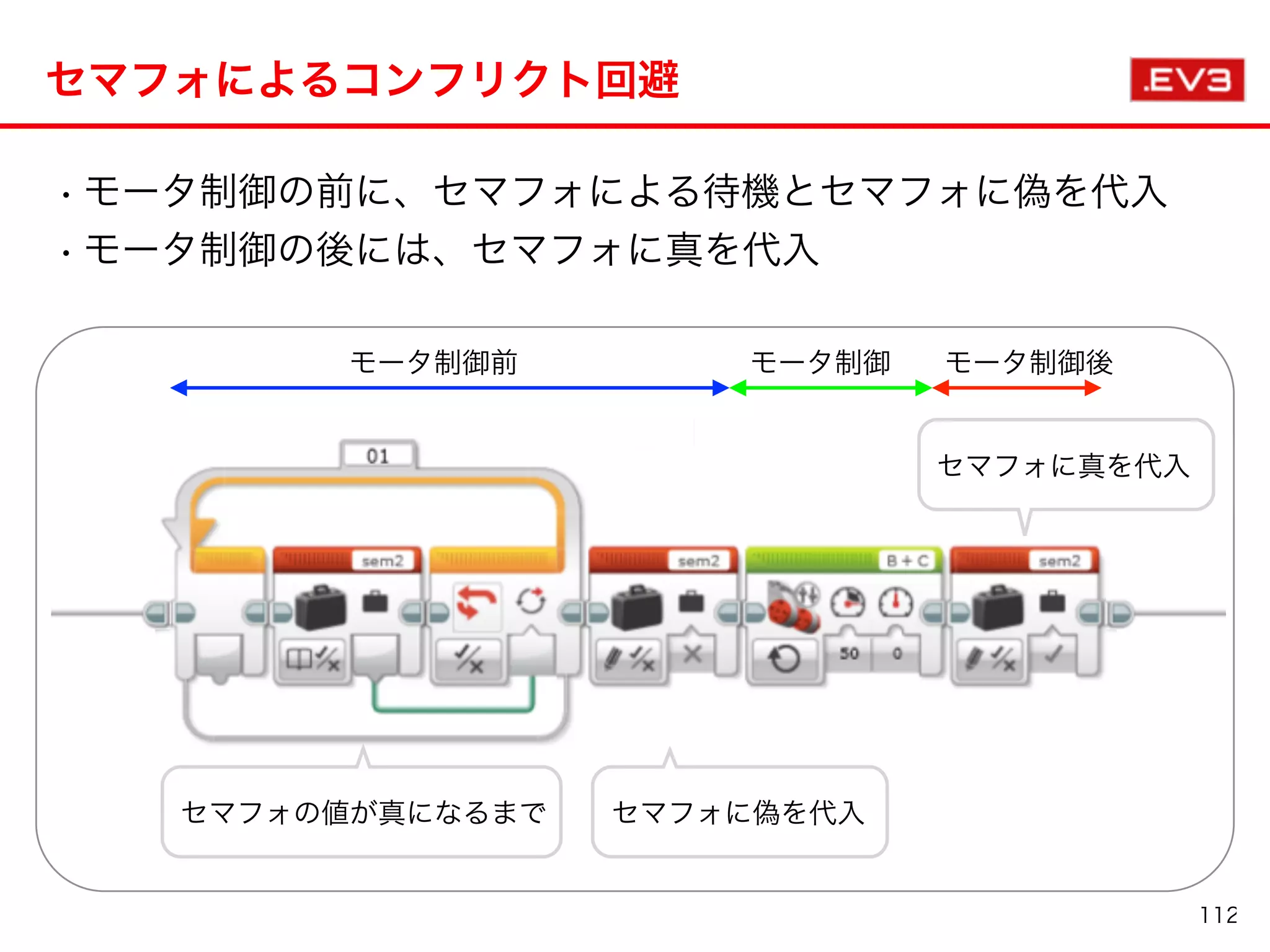
• モータ制御の前に、セマフォによる待機とセマフォに偽を代入 • モータ制御の後には、セマフォに真を代入 セマフォによるコンフリクト回避 セマフォの値が真になるまで
セマフォに偽を代入 セマフォに真を代入 モータ制御前 モータ制御 モータ制御後 112
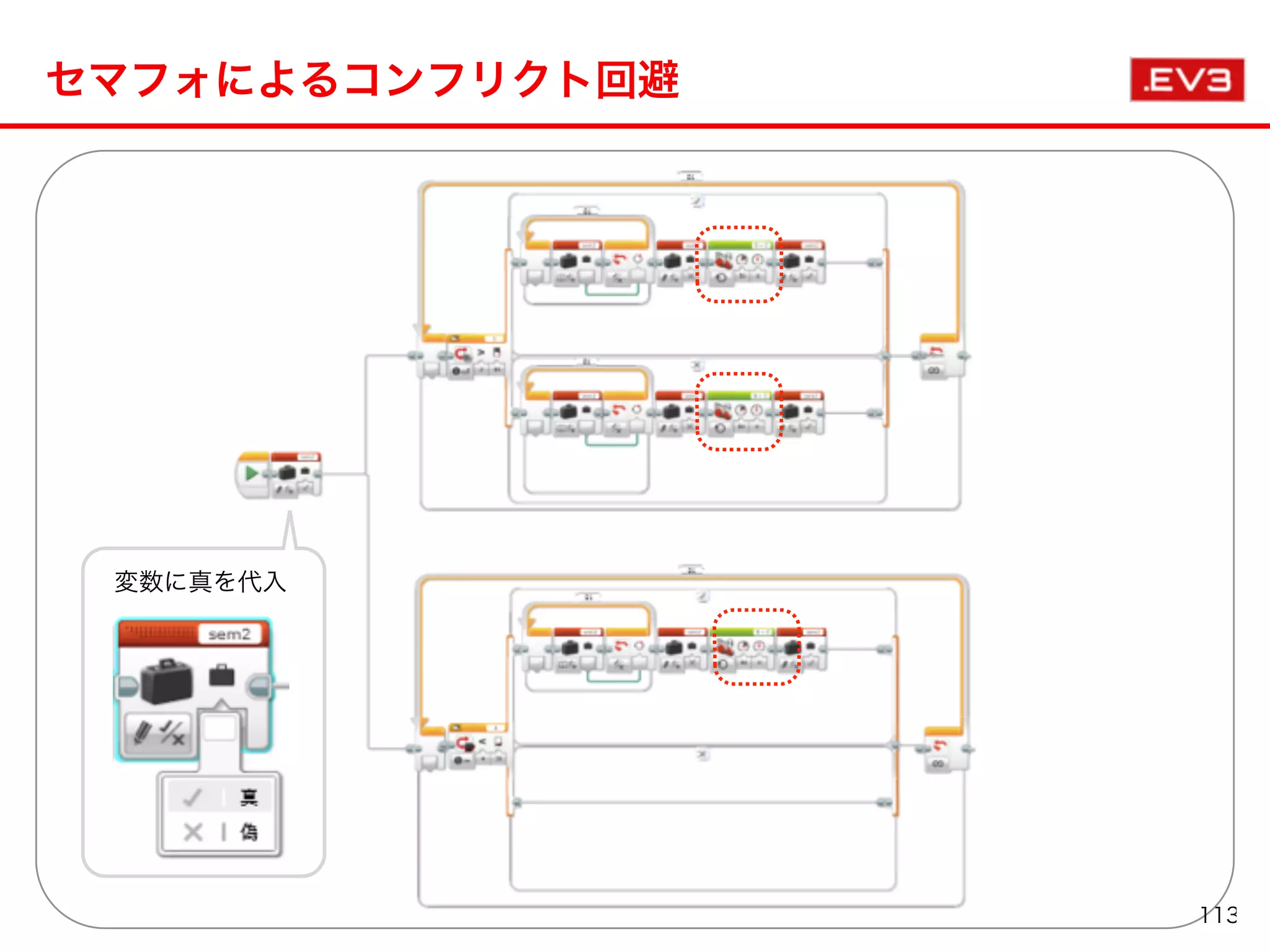
113.
セマフォによるコンフリクト回避 変数に真を代入 113
114.
藤吉 弘亘 (Hironobu
Fujiyoshi) 中部⼤大学 ⼯工学部情報⼯工学科(ロボット理理⼯工学科),⼤大学院⼯工学研究科情報⼯工学専攻 教授 1997年年 中部⼤大学⼤大学院 博⼠士後期課程修了了 1997〜~2000年年 ⽶米国カーネギーメロン⼤大学 ロボット⼯工学研究所 Postdoctoral Fellow 2000年年 中部⼤大学 講師 2004年年 中部⼤大学 准教授 2006年年 ⽶米国カーネギーメロン⼤大学 ロボット⼯工学研究所 客員研究員 2010年年〜~中部⼤大学 教授 2014年年〜~名古屋⼤大学 客員教授 博⼠士(⼯工学)計算機視覚、動画像処理理、パターン認識識・理理解の研究に従事 ロボカップ研究賞(2005年年),⼭山下記念念研究賞(2009年年),情報処理理学会論論⽂文賞(2009年年),画像センシングシンポジウム 優秀学術賞(2011年年,2013年年),電⼦子情報通信学会ISS論論⽂文賞(2013年年) E-‐‑‒mail: hf@cs.chubu.ac.jp WEB: http://www.vision.cs.chubu.ac.jp/ Facebook: facebook.com/hironobu.fujiyoshi Twitter: @hf149
115.
[WEBサイト] http://www.robot-programming.jp/ [単行本] 実践ロボットプログラミング LEGO Mindstorms NXTで目指せロボコン! 近代科学社 ISBN-13:
978-4764903784
116.
[電子書籍iBook] NXT-SWによる実践ロボットプログラミング 近代科学社 https://itunes.apple.com/jp/book/ id902846245 [電子書籍iBook] NXCによる実践ロボットプログラミング 近代科学社 https://itunes.apple.com/jp/book/ id902356211
Download



![• モータの回転角を変化させたときの直進距離を測定し法則をみ
つける
角度:
180∼1440度
50cm前進するには?
45
角度[ ] 距離[cm]
1cmあたりの
回転角度
180 9.0 20.0
360 17.5 20.6
720 34.5 20.8
1080 52.5 20.5
1440 69.5 20.4
※1cmあたりの回転角度 =回転角度[ ] / 距離[cm]
中央値
回転角度 = 直進したい距離 1cmあたりの回転角度
20.5度](https://image.slidesharecdn.com/lego-ev3sw-150428062414-conversion-gate01/75/Tutorial-for-robot-programming-with-LEGO-mindstorms-EV3-45-2048.jpg)






![• LEDを切り替えて発光し、そのタイミングでの反射光を計測し
て、カラーを計測
カラーセンサの原理
LED:青 R:
G:
B:
黄色
オシロスコープで計測してみたところ:
1秒間に1,000回、R,G,Bと切り替えて発光し、
同期してフォトダイオードで反射光量を計測
1[ms]
74](https://image.slidesharecdn.com/lego-ev3sw-150428062414-conversion-gate01/75/Tutorial-for-robot-programming-with-LEGO-mindstorms-EV3-74-2048.jpg)

![ジャイロセンサの原理
ジャイロセンサの測定原理
ジャイロセンサは角速度センサとも呼ばれ、単位時間あたりの回転角
である角速度[degree/s]を計測
ジャイロチップ
(InvenSense社)](https://image.slidesharecdn.com/lego-ev3sw-150428062414-conversion-gate01/75/Tutorial-for-robot-programming-with-LEGO-mindstorms-EV3-84-2048.jpg)
![ジャイロセンサ
85
• EV3のジャイロセンサは一軸の回転角/角速度を計測
回転角 [degree]
角速度 [degree/sec]](https://image.slidesharecdn.com/lego-ev3sw-150428062414-conversion-gate01/75/Tutorial-for-robot-programming-with-LEGO-mindstorms-EV3-85-2048.jpg)

![[WEBサイト]
http://www.robot-programming.jp/
[単行本]
実践ロボットプログラミング
LEGO Mindstorms NXTで目指せロボコン!
近代科学社
ISBN-13: 978-4764903784](https://image.slidesharecdn.com/lego-ev3sw-150428062414-conversion-gate01/75/Tutorial-for-robot-programming-with-LEGO-mindstorms-EV3-115-2048.jpg)
![[電子書籍iBook]
NXT-SWによる実践ロボットプログラミング
近代科学社
https://itunes.apple.com/jp/book/
id902846245
[電子書籍iBook]
NXCによる実践ロボットプログラミング
近代科学社
https://itunes.apple.com/jp/book/
id902356211](https://image.slidesharecdn.com/lego-ev3sw-150428062414-conversion-gate01/75/Tutorial-for-robot-programming-with-LEGO-mindstorms-EV3-116-2048.jpg)



























![[DL輪読会]Deep Neural Networks as Gaussian Processes](https://cdn.slidesharecdn.com/ss_thumbnails/dl0216okamoto2162-180323031830-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]TossingBot: Learning to Throw Arbitrary Objects with Residual Physics](https://cdn.slidesharecdn.com/ss_thumbnails/20190419dlkoheinishimura-190422082949-thumbnail.jpg?width=640&height=640&fit=bounds)


















![-SSIIの技術マップ- 過去•現在, そして未来 [領域]認識](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2014-os-recognition-140612-140611032253-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)












