Download as PPS, PPTX

![[6]-20
=
′
′
−
=
′
′
=
′
′
1100
00
00
1
1100
0cossin
0sincos
1
1100
10
01
1
y
x
s
s
y
x
y
x
y
x
y
x
t
t
y
x
y
x
y
x
θθ
θθ
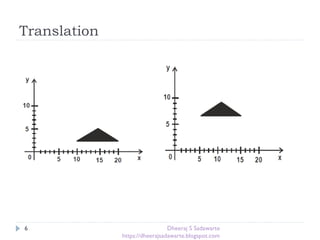
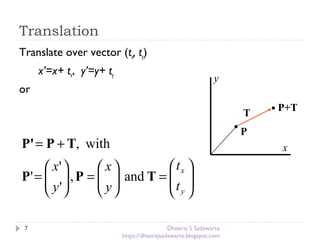
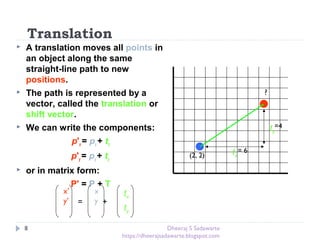
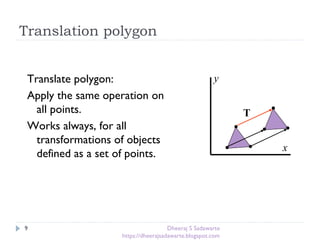
Translation
P’=TP
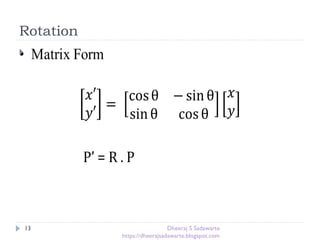
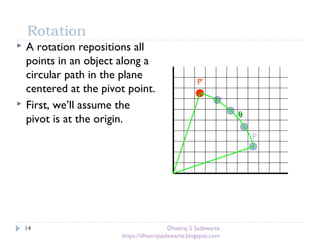
Rotation [O]
P’=RP
Scaling
P’=SP
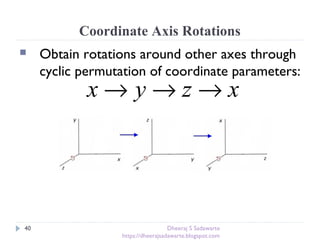
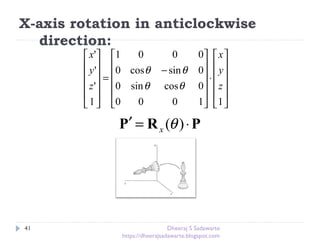
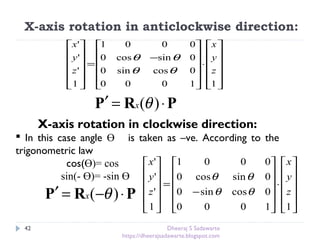
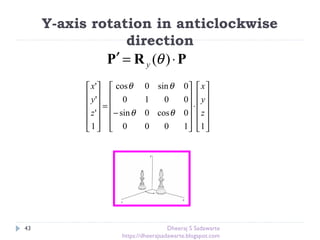
Basic Transformations
Homogeneous Coordinates
Dheeraj S Sadawarte
https://dheerajsadawarte.blogspot.com](https://image.slidesharecdn.com/3overviewoftransformation-190810130855/85/Overview-of-2D-and-3D-Transformation-20-320.jpg)
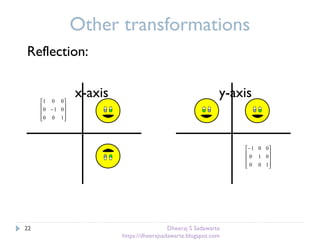
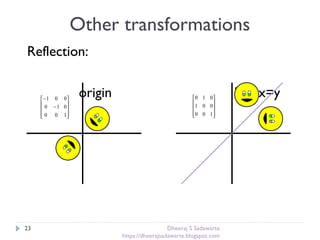
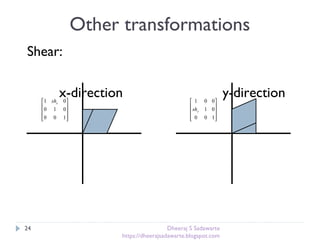
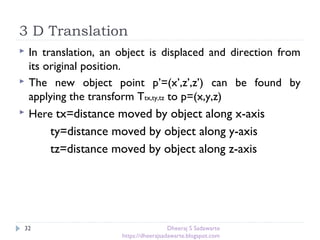
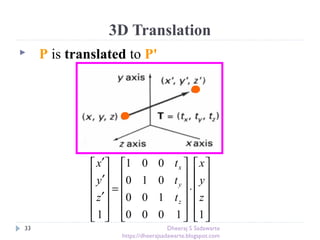
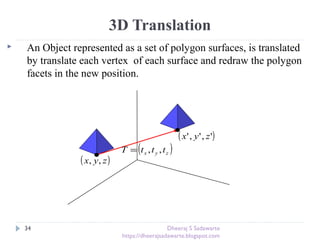
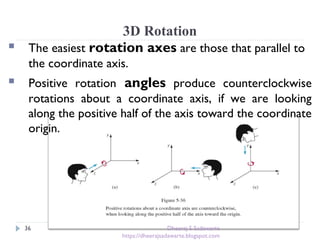
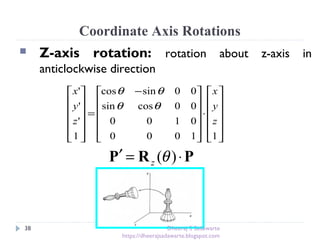
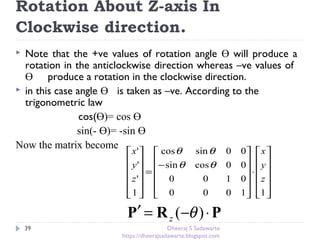
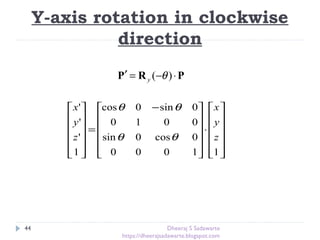
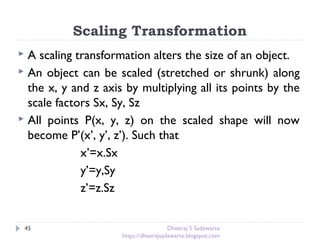
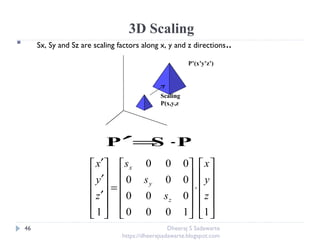
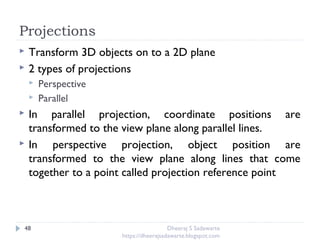

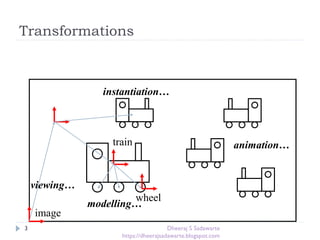
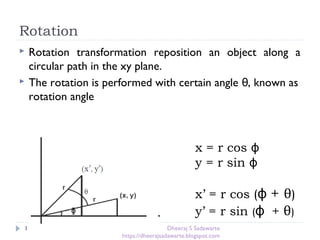
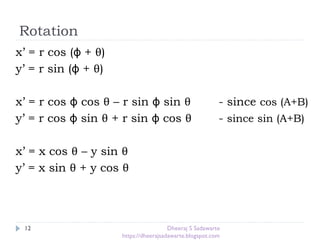
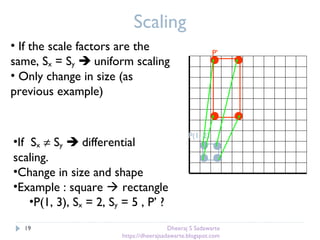
The document provides an overview of transformations in computer graphics, including translation, rotation, and scaling. It explains how these transformations modify the appearance and position of objects in 2D and 3D spaces, along with mathematical representations such as matrices. Additional transformations like reflection and shear are also briefly discussed.