Downloaded 2,639 times
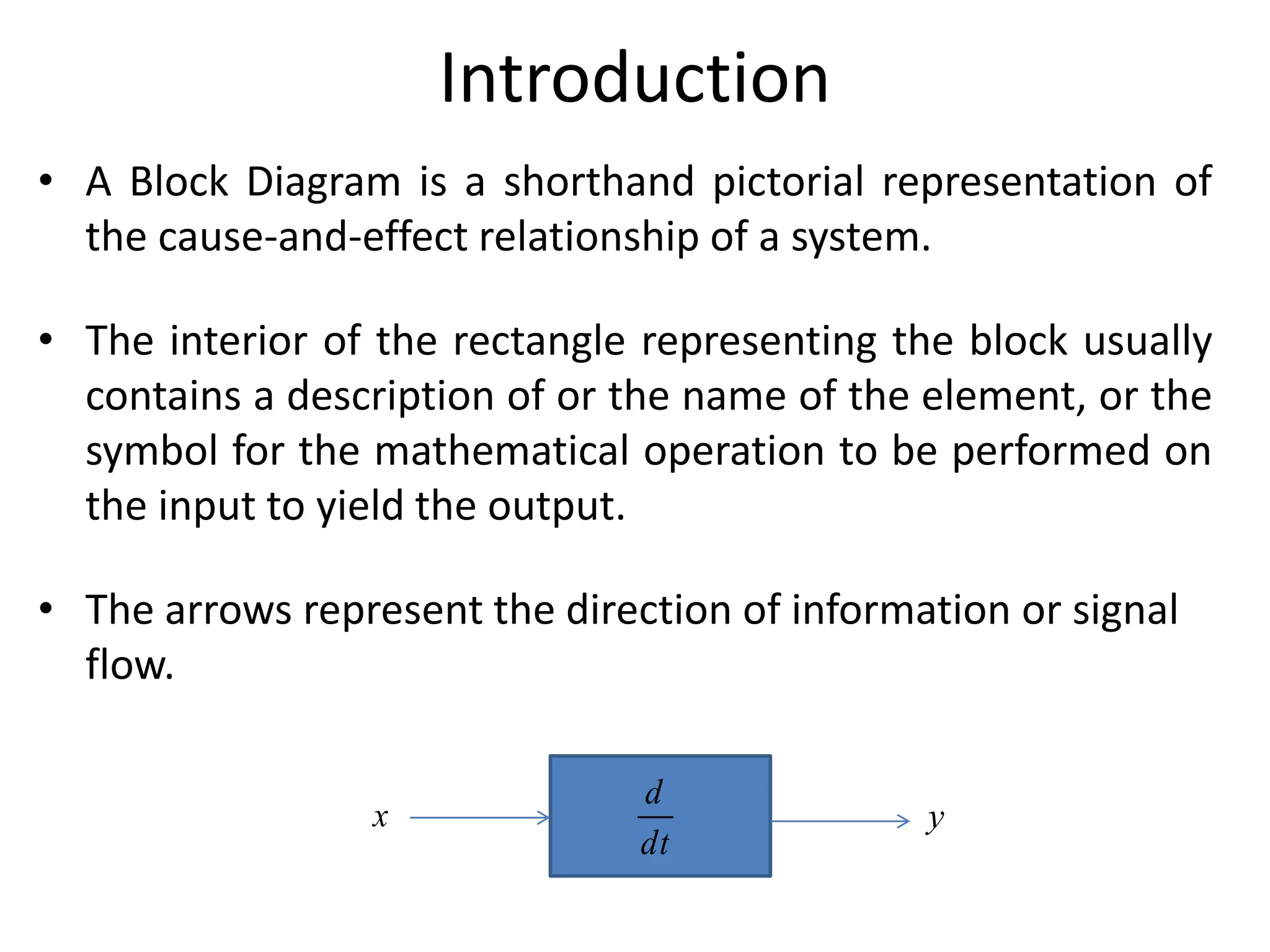
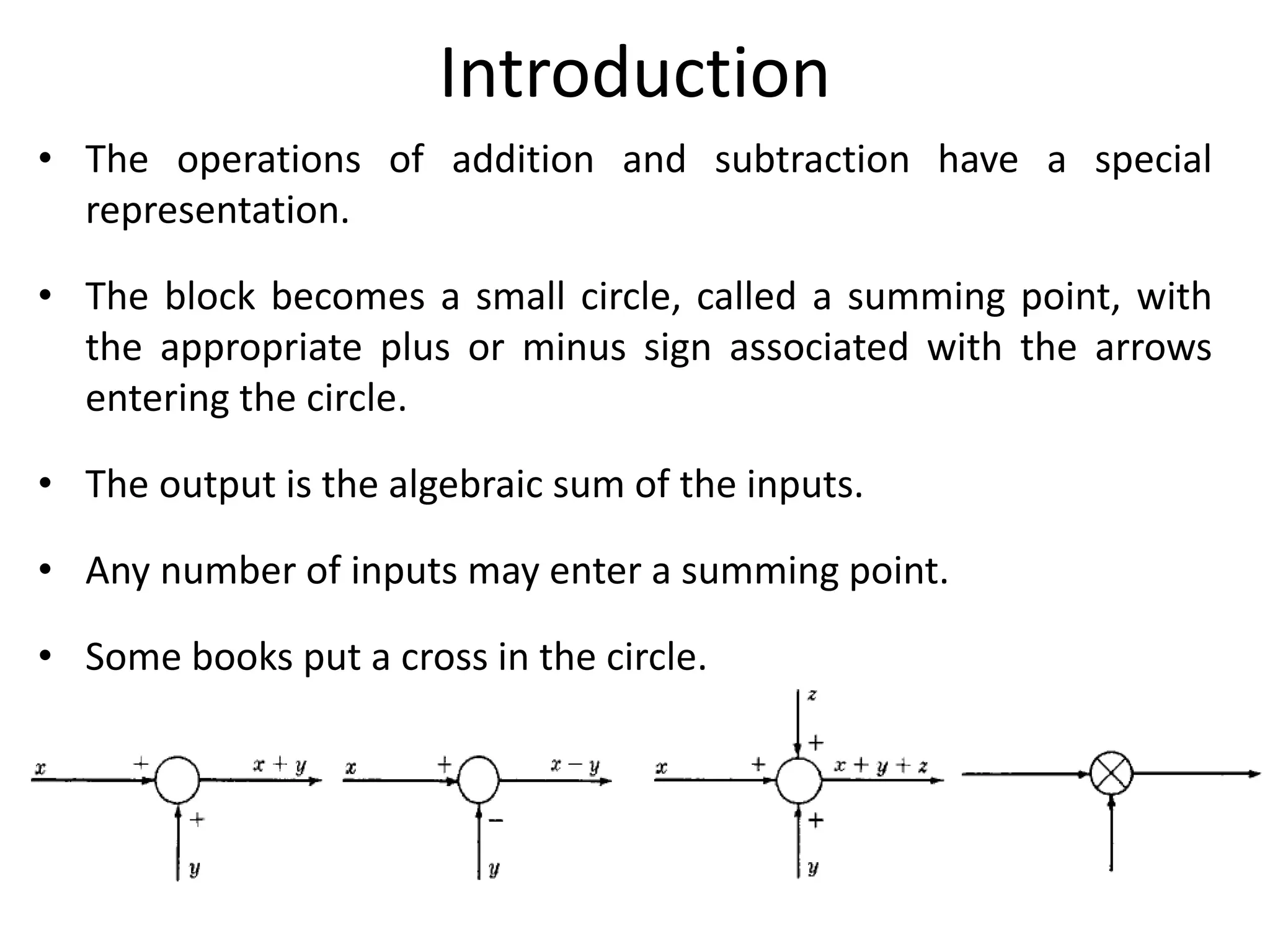
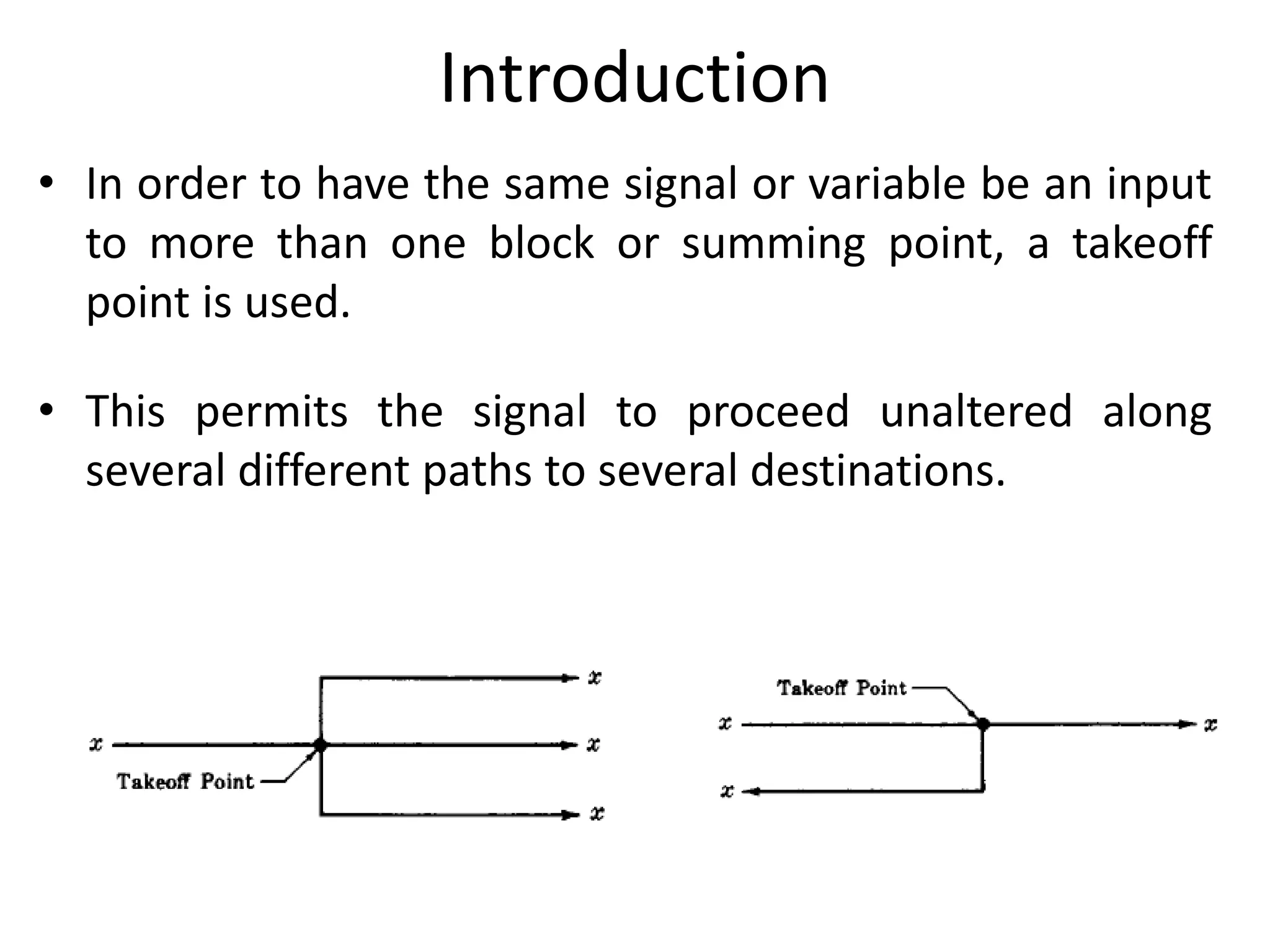

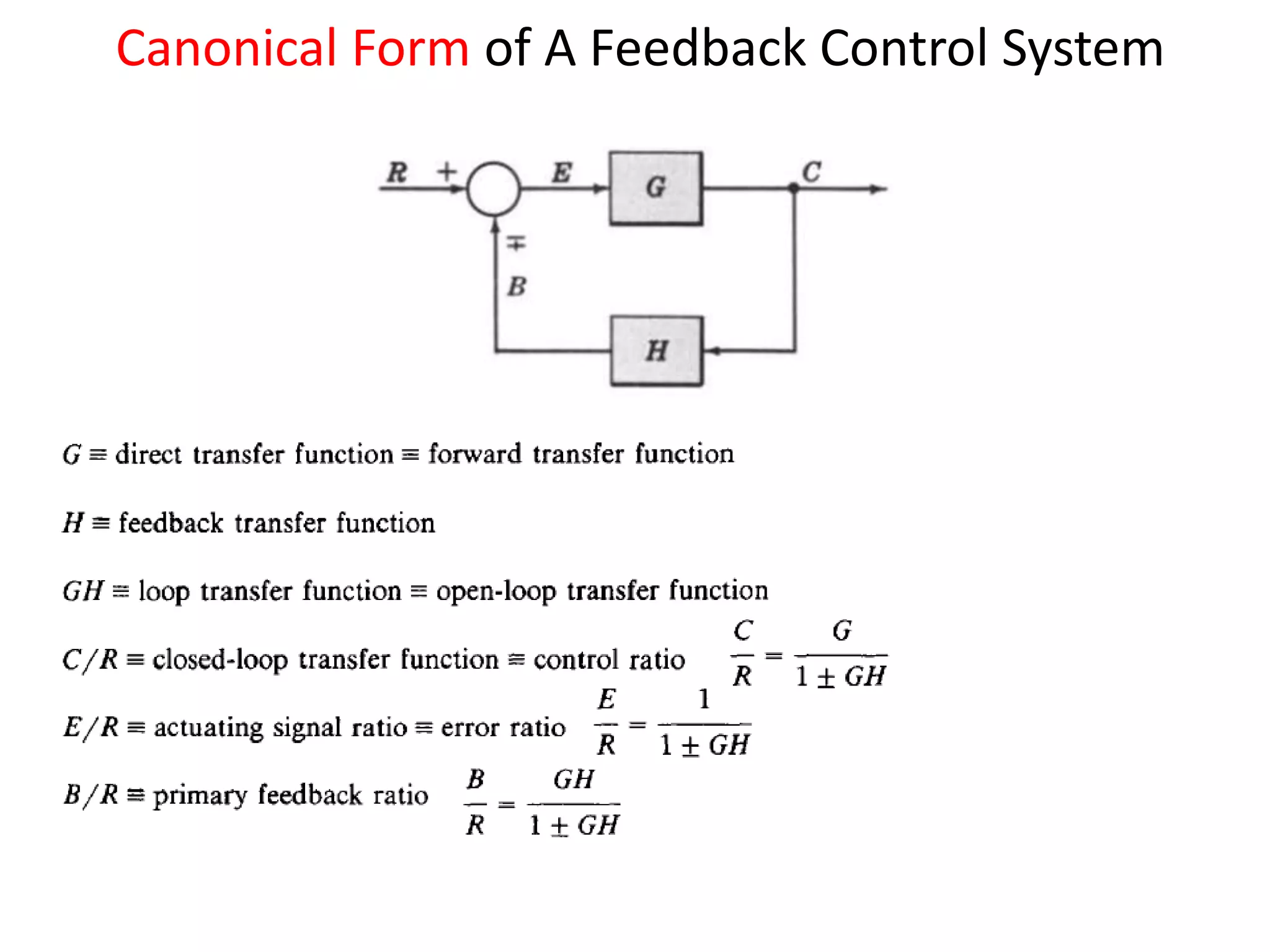
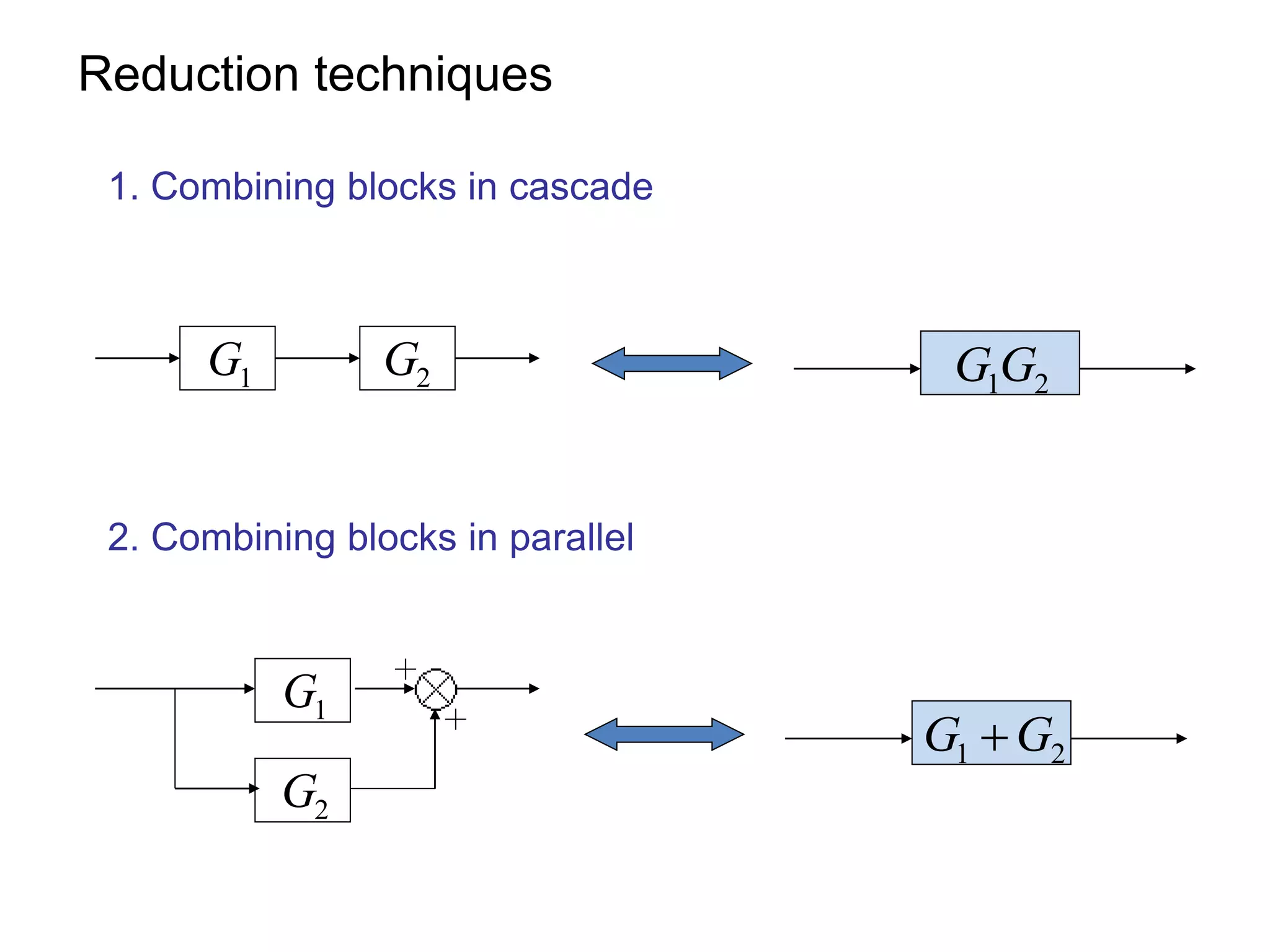
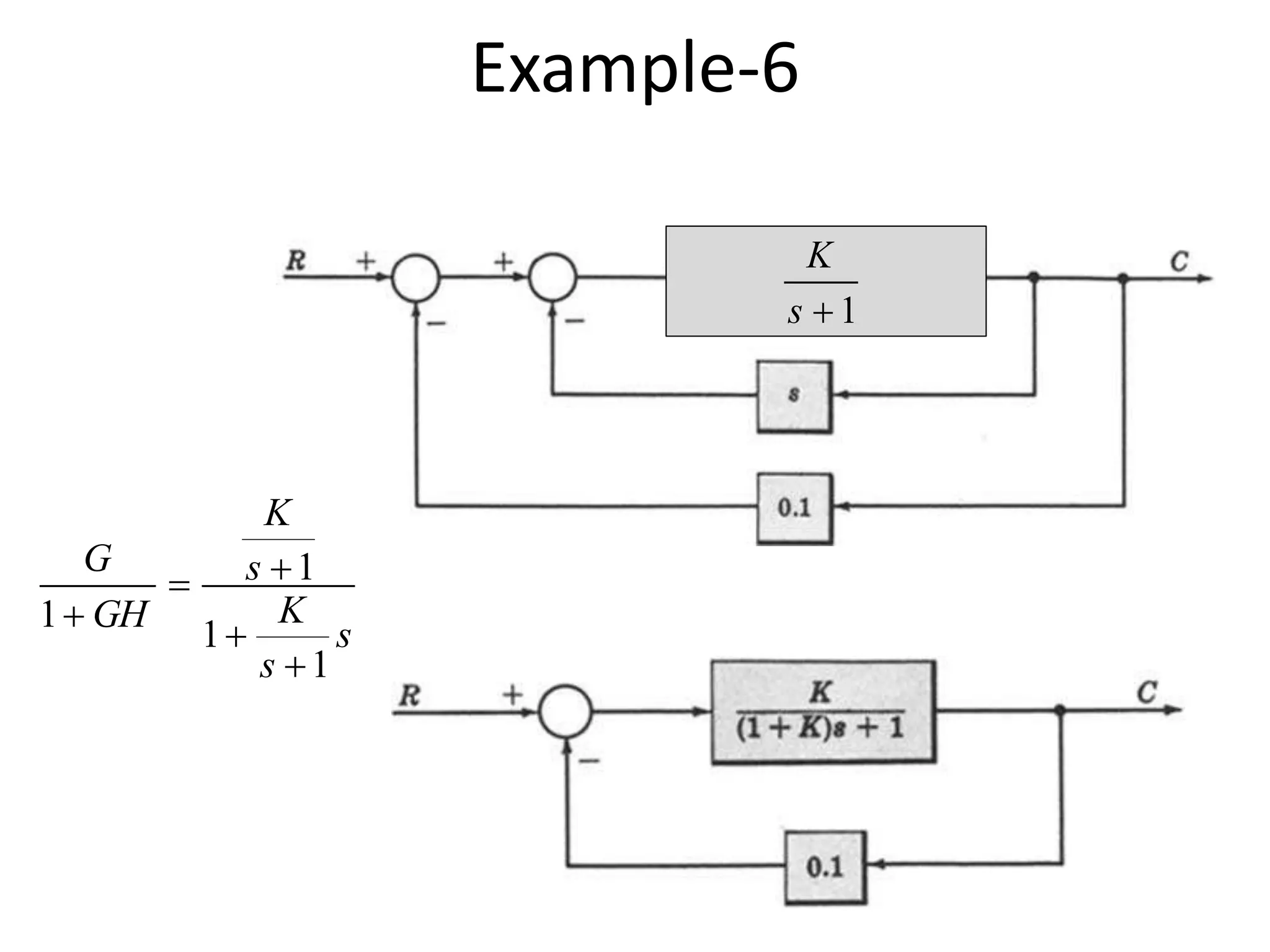
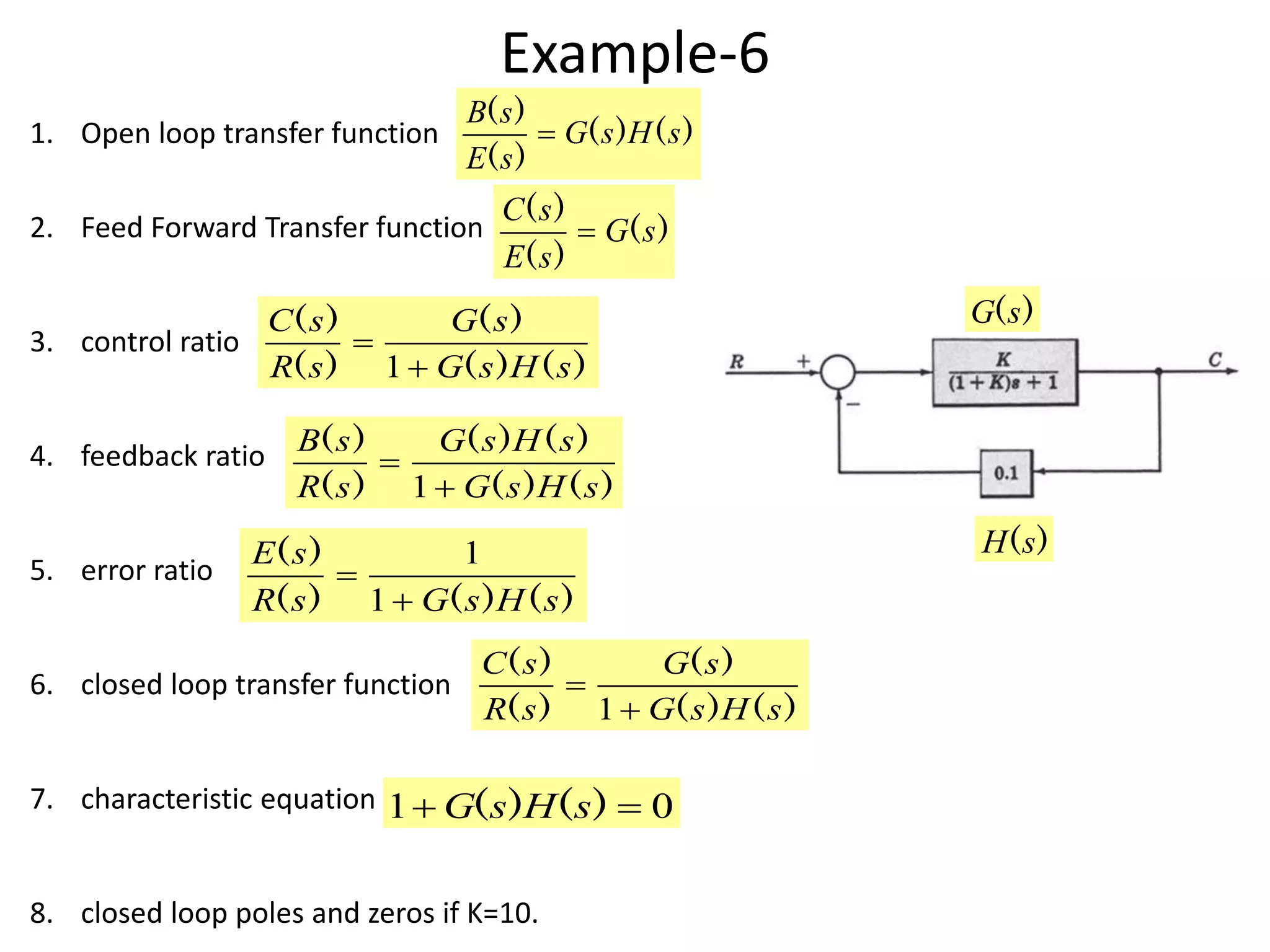
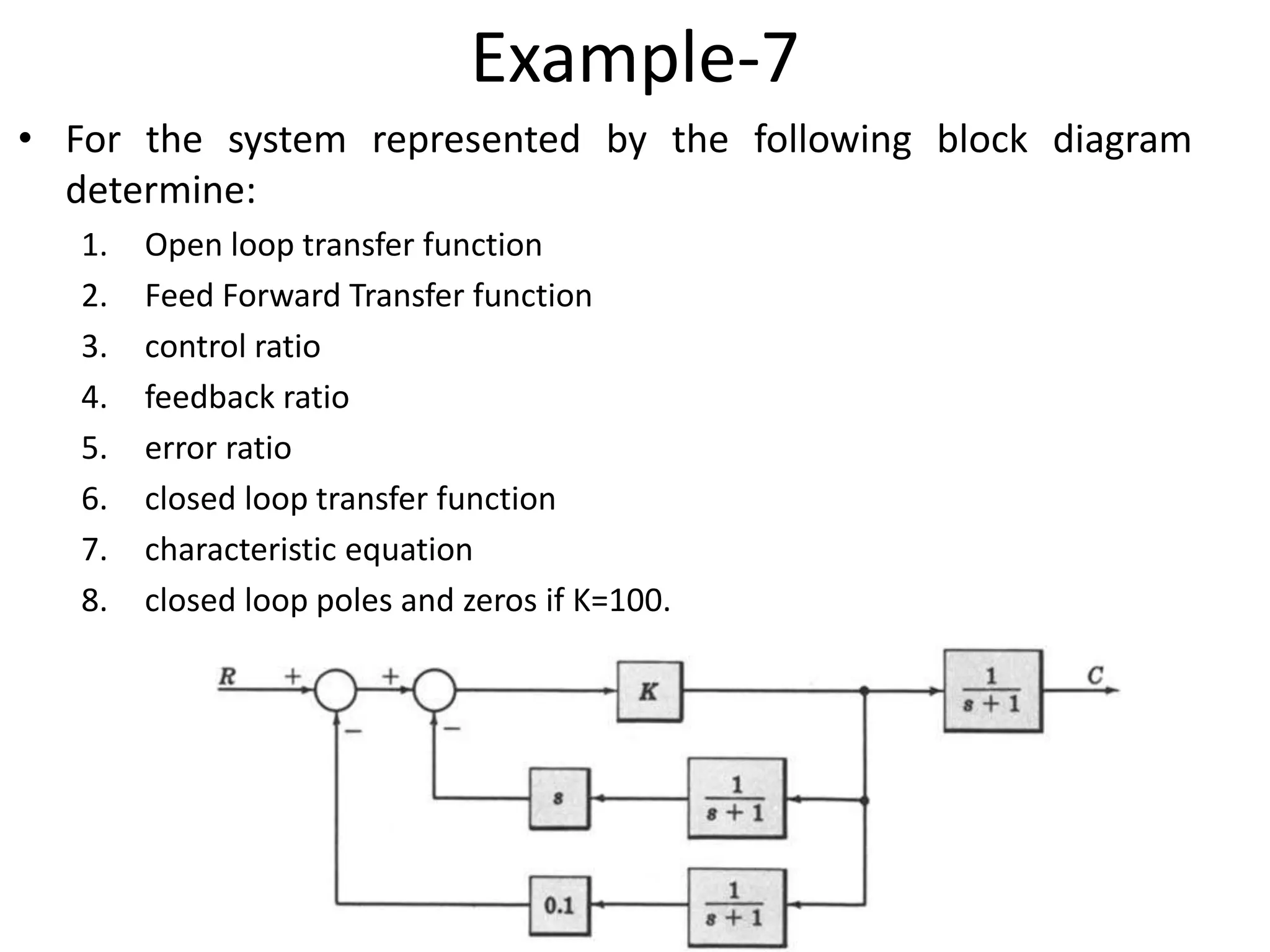
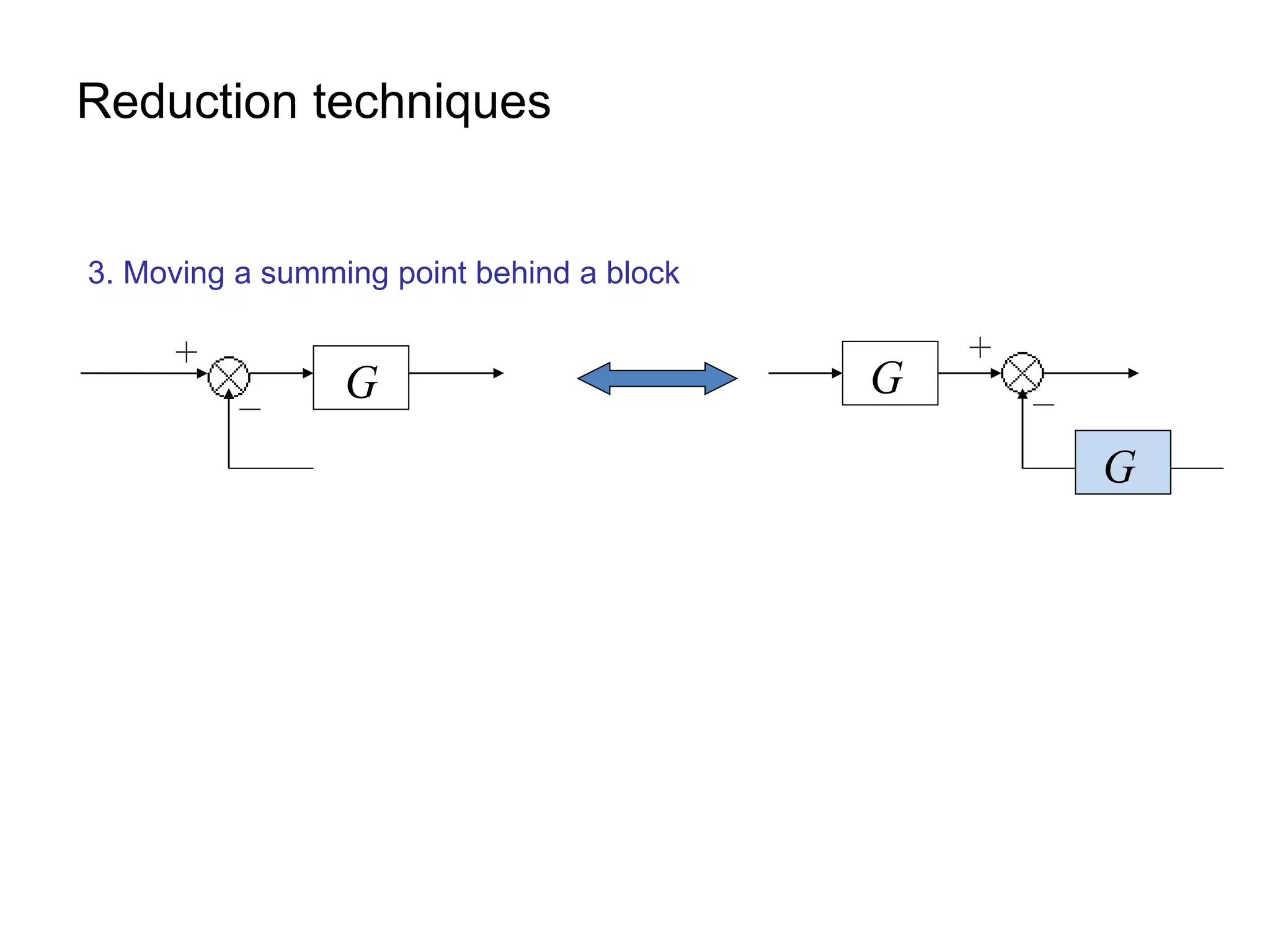
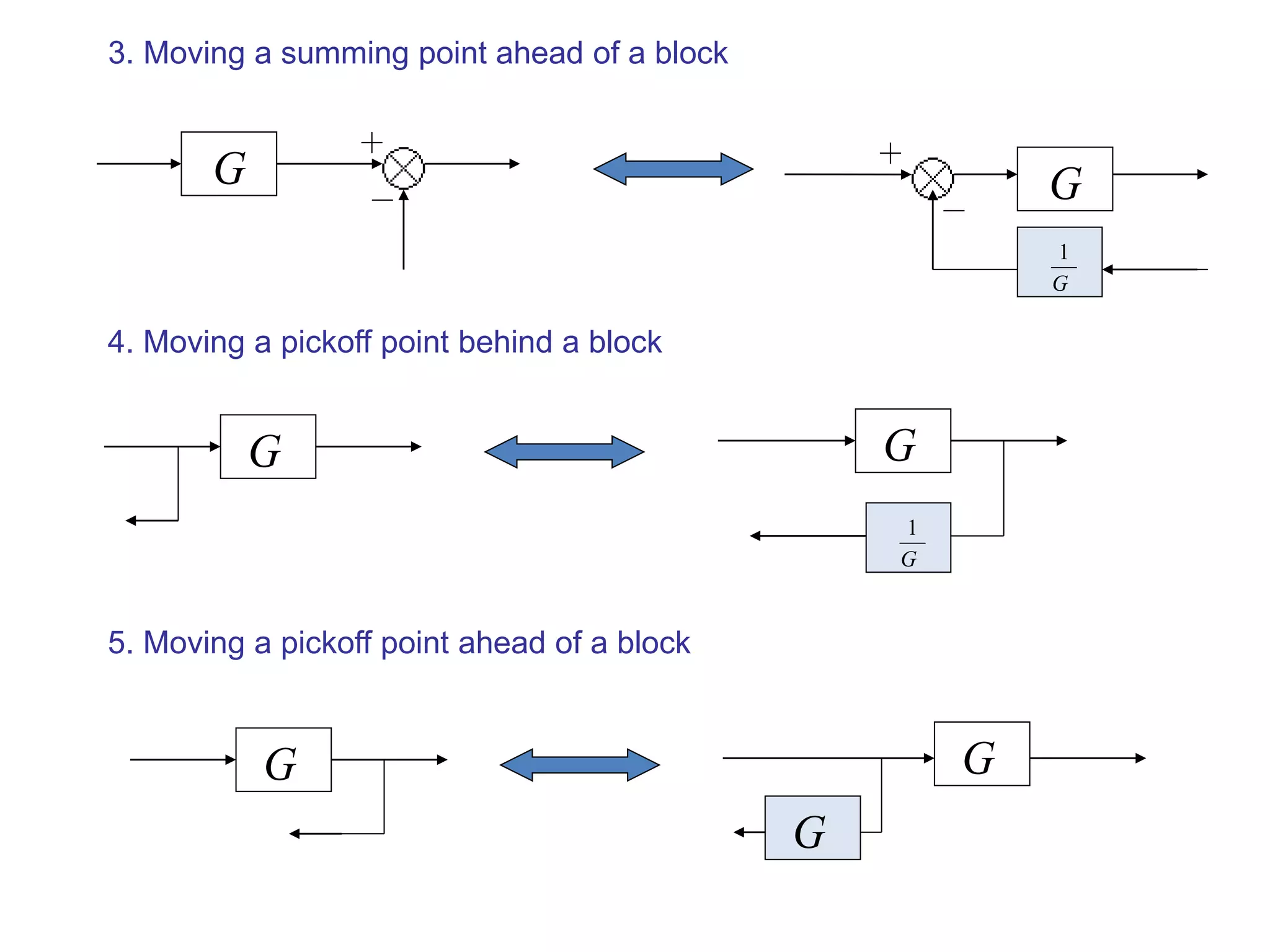
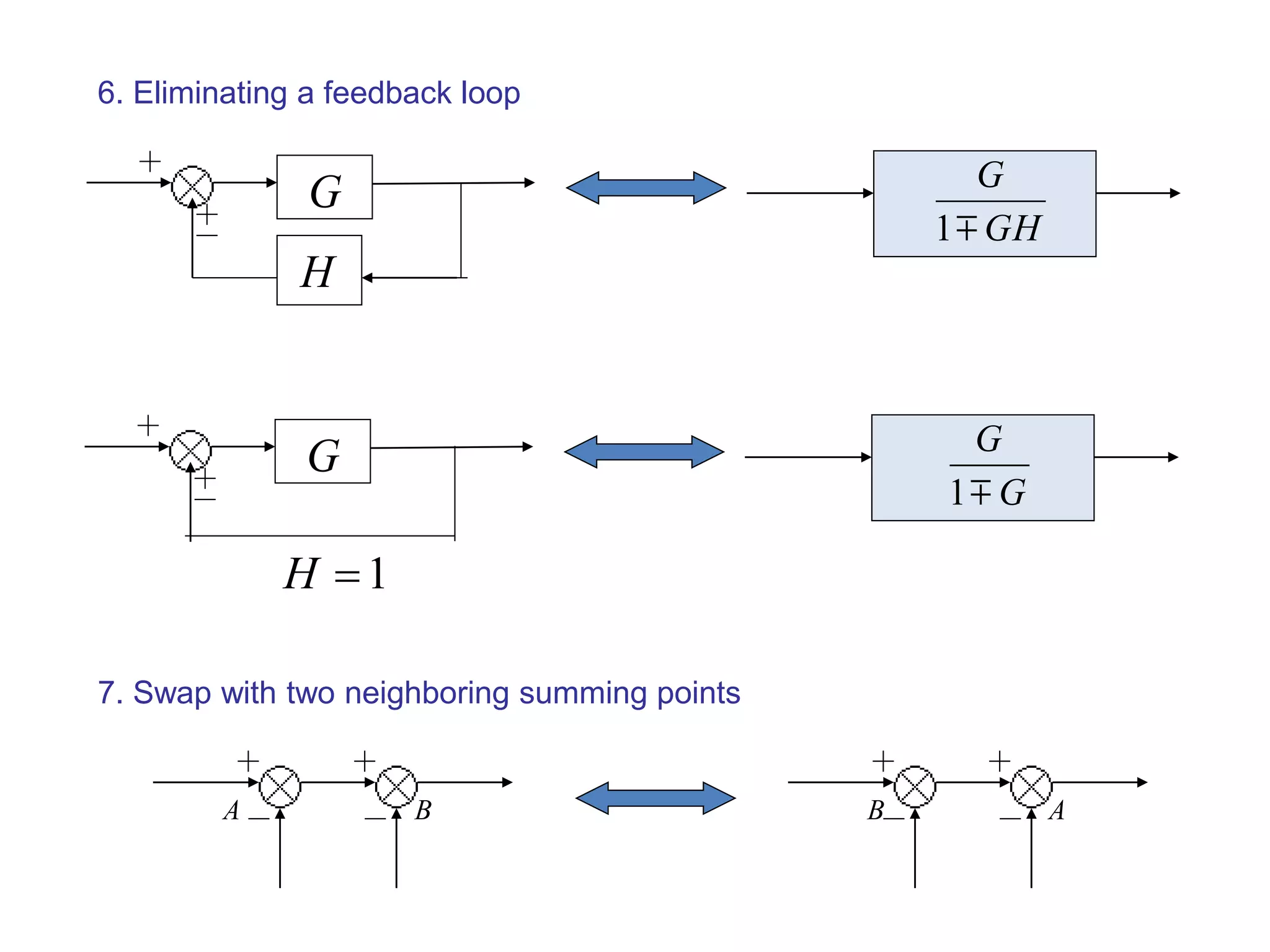
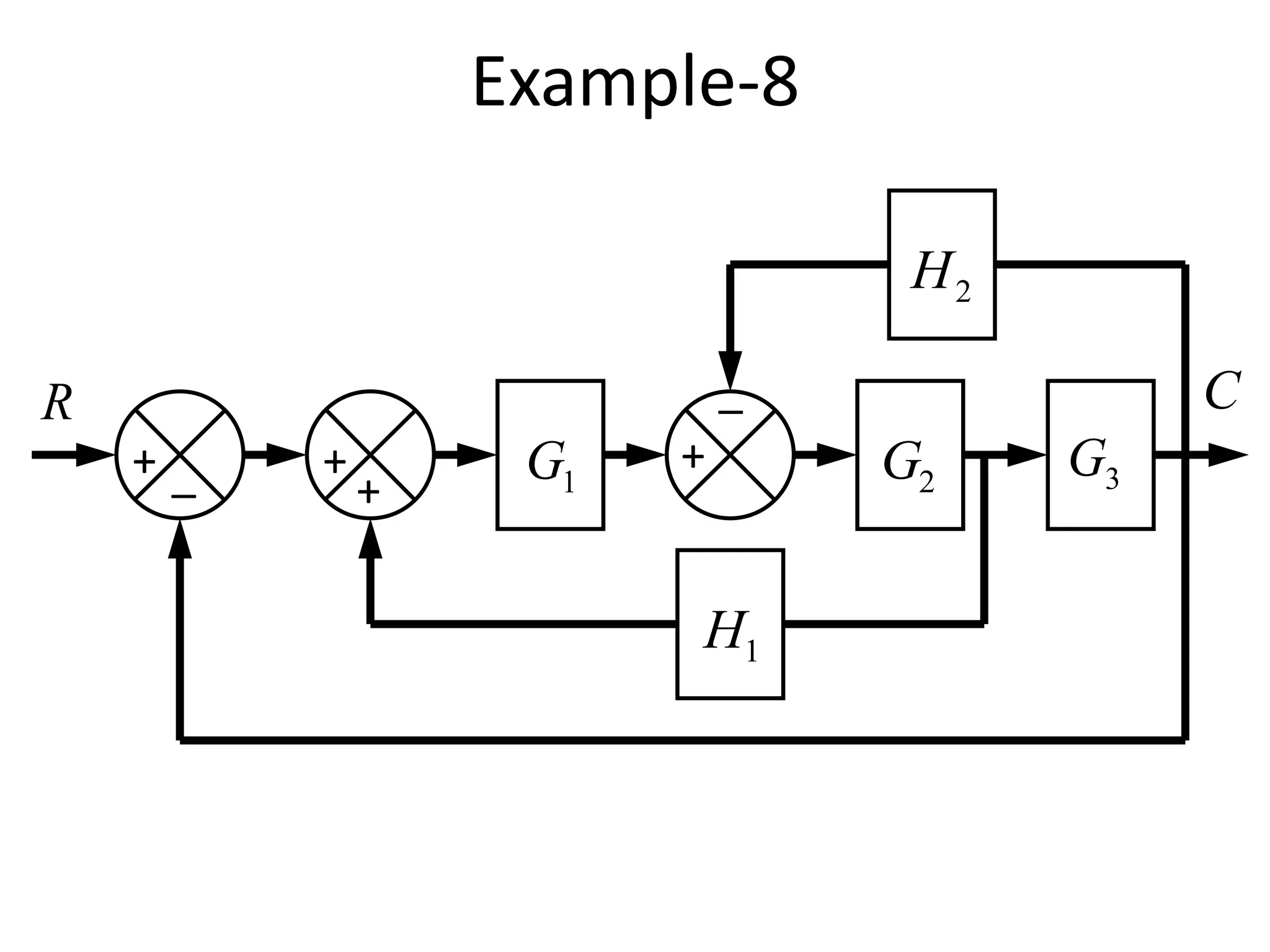
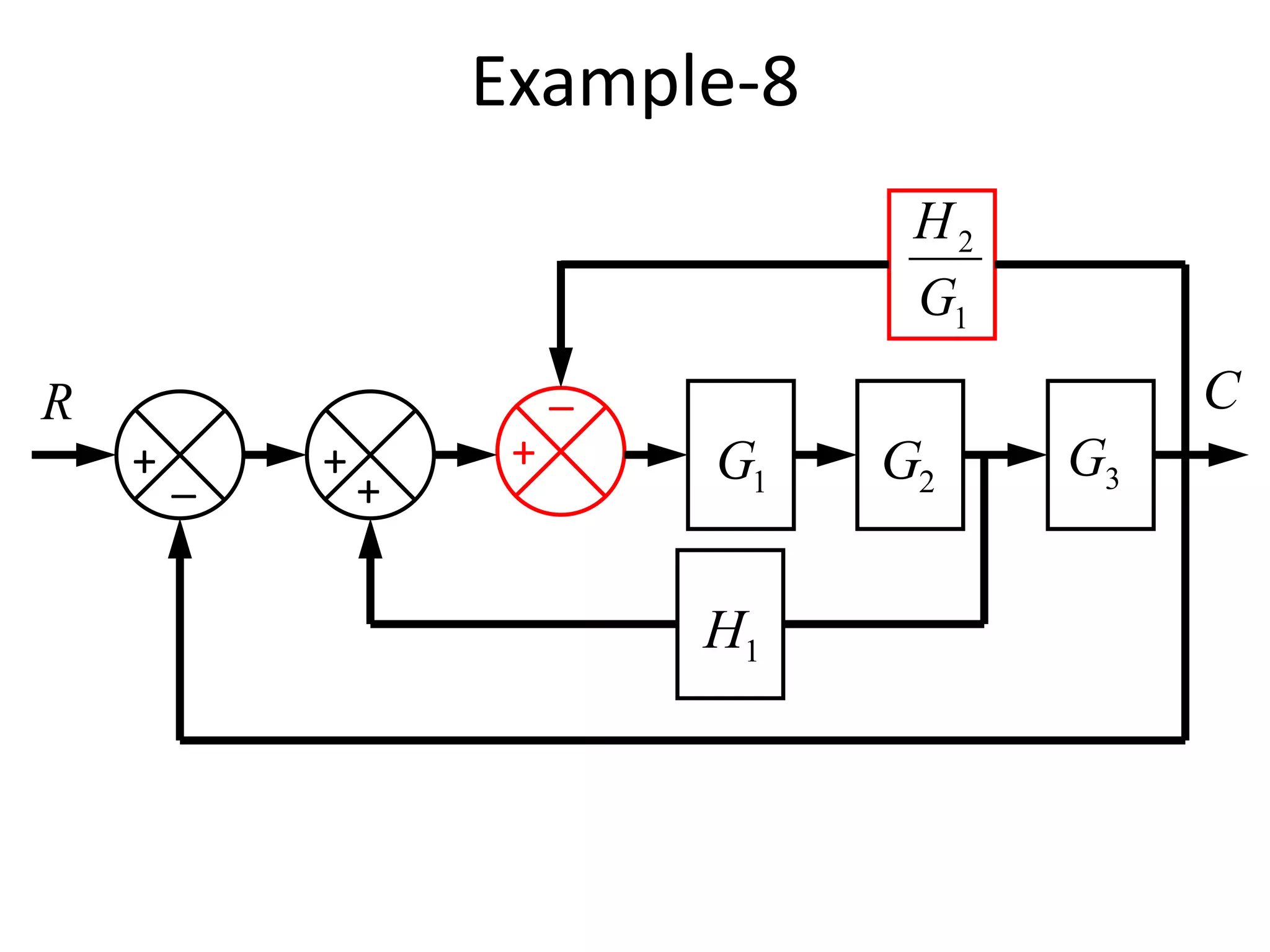
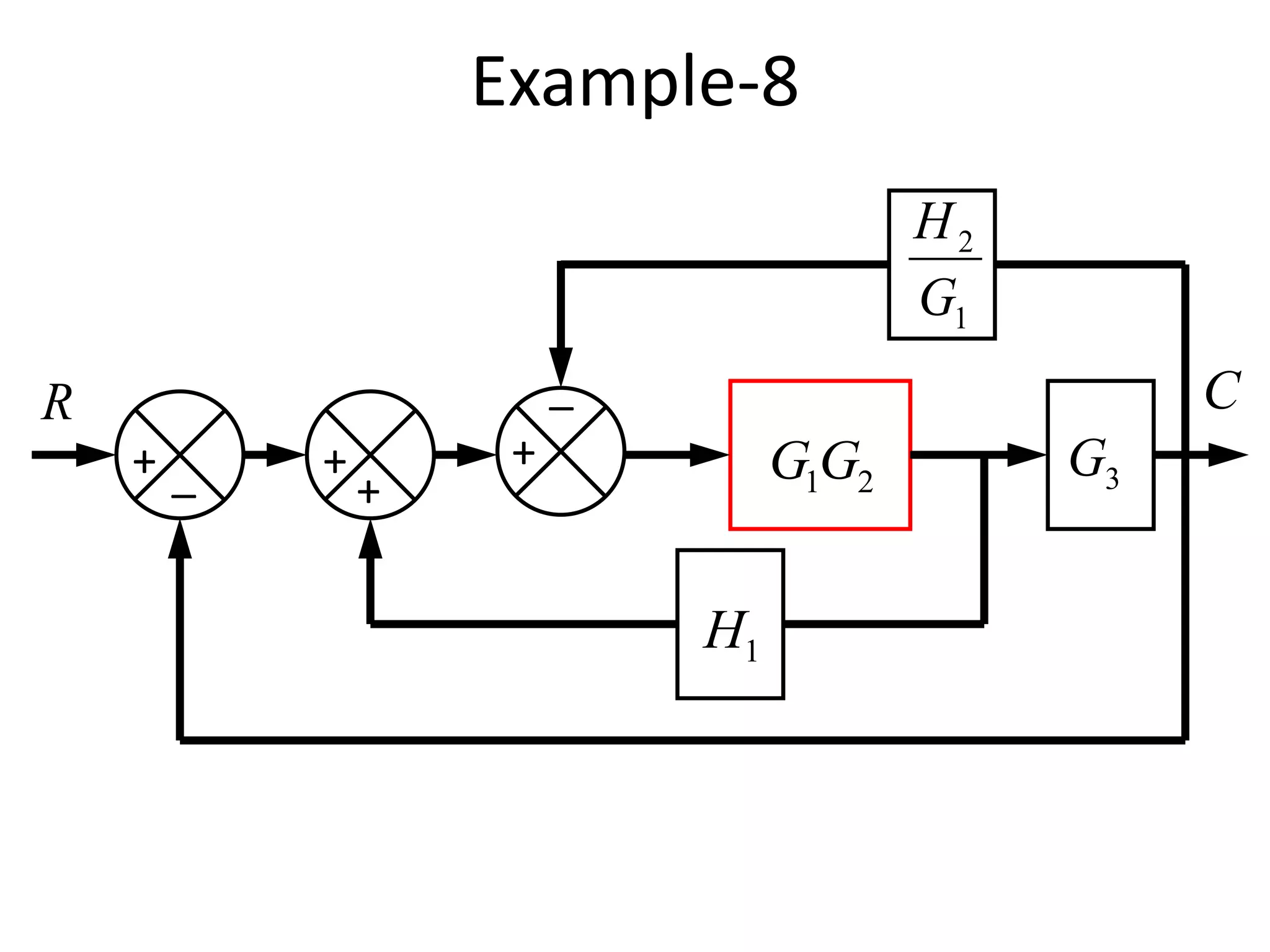
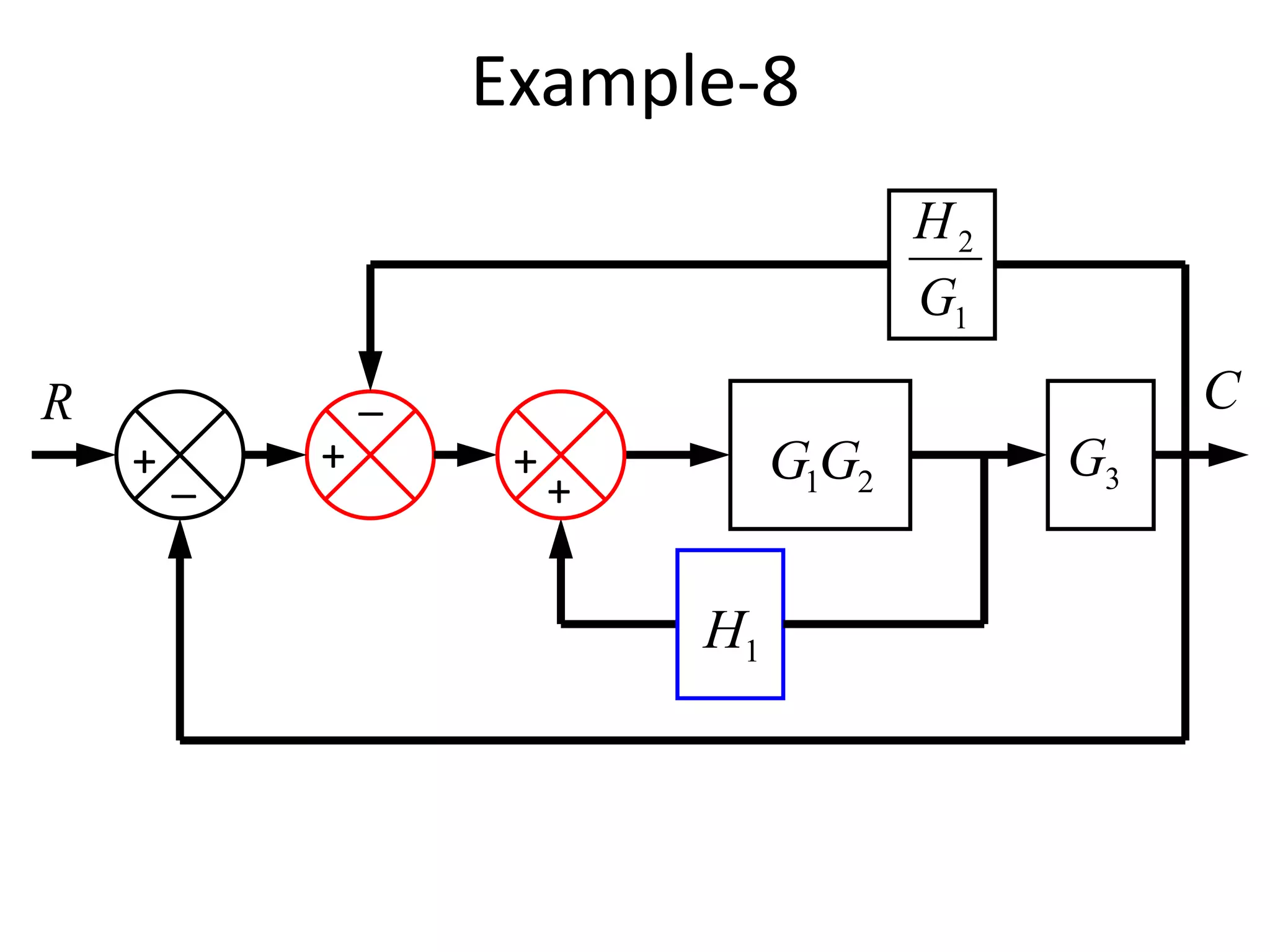
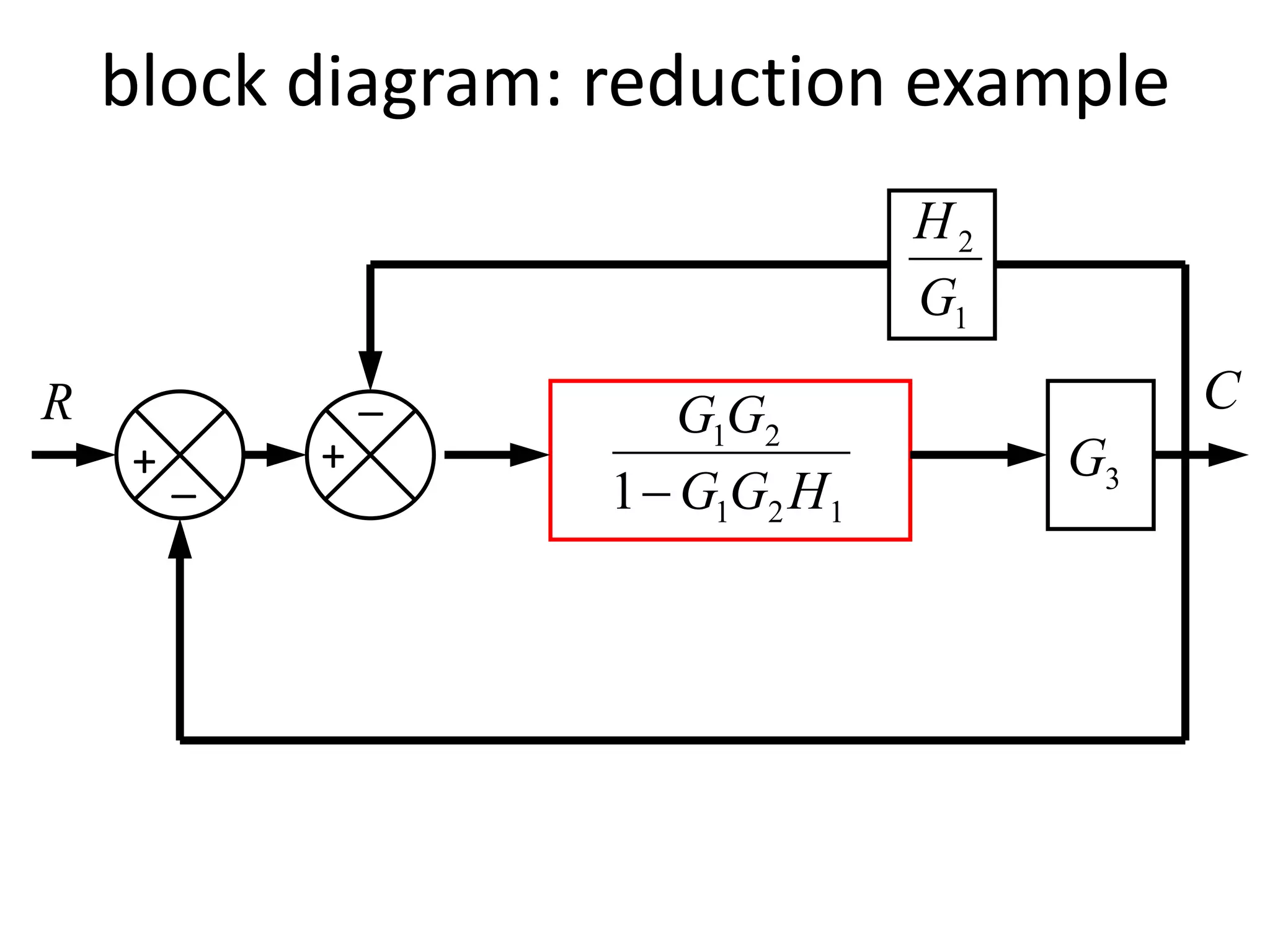
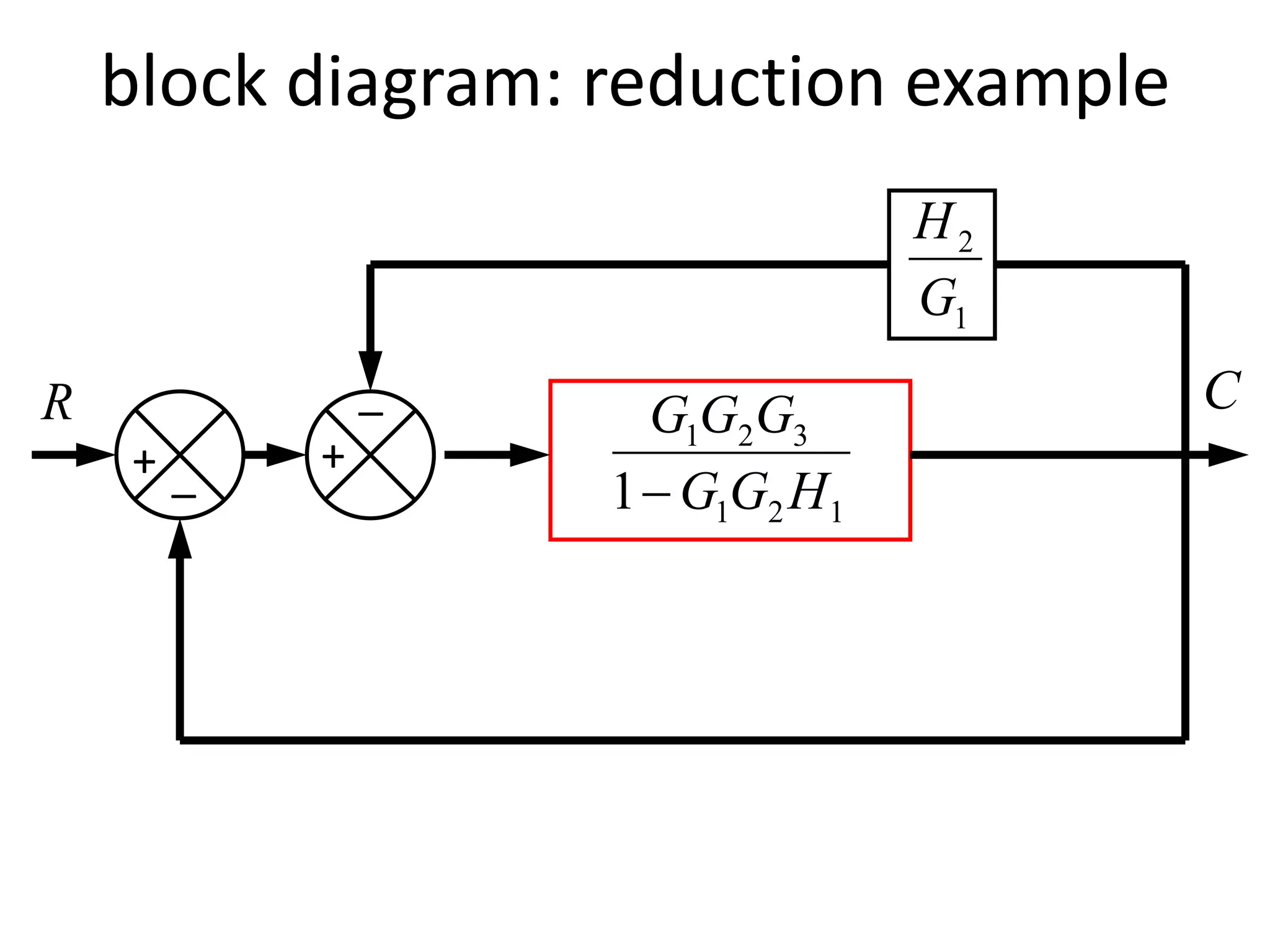

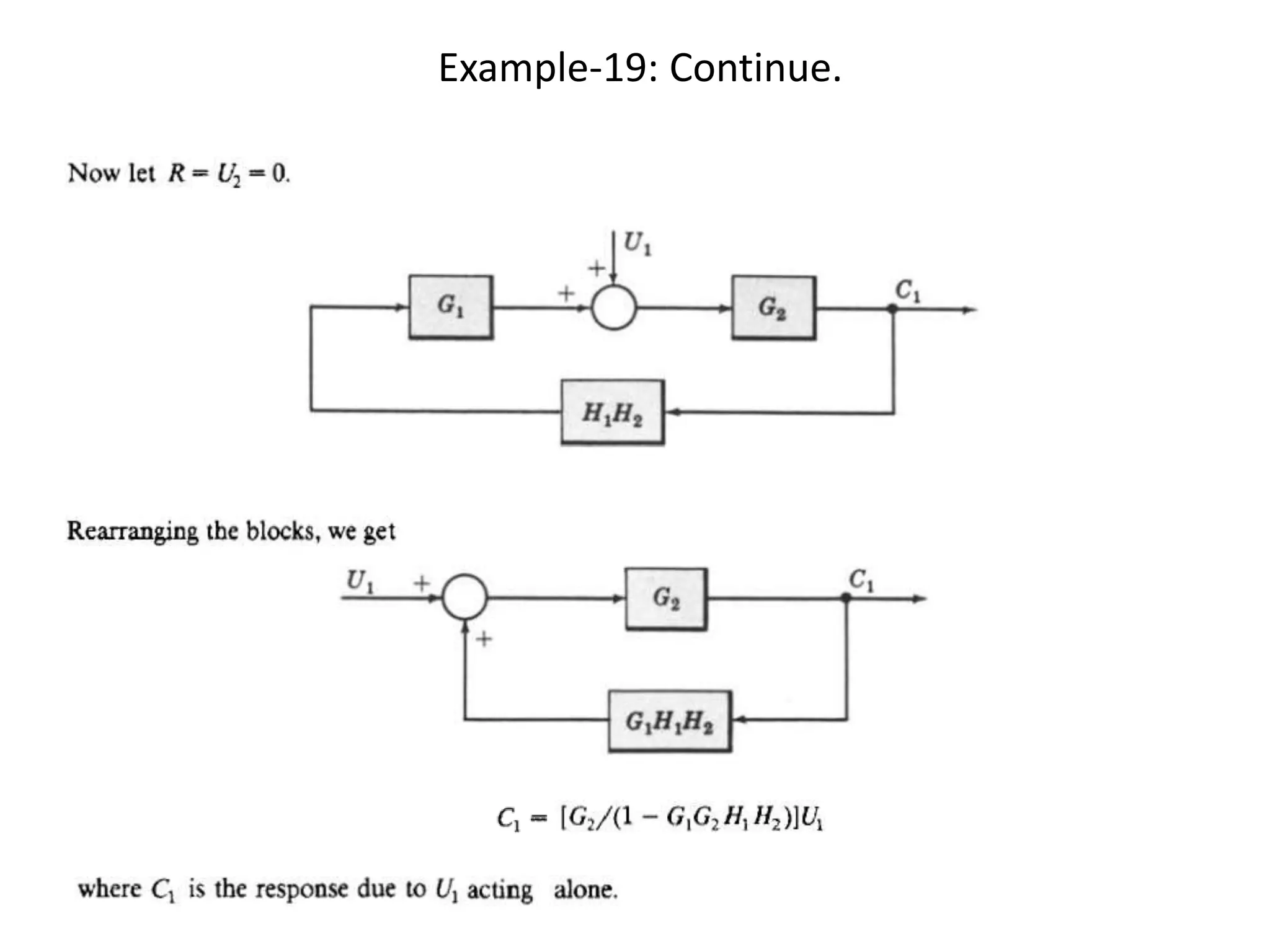
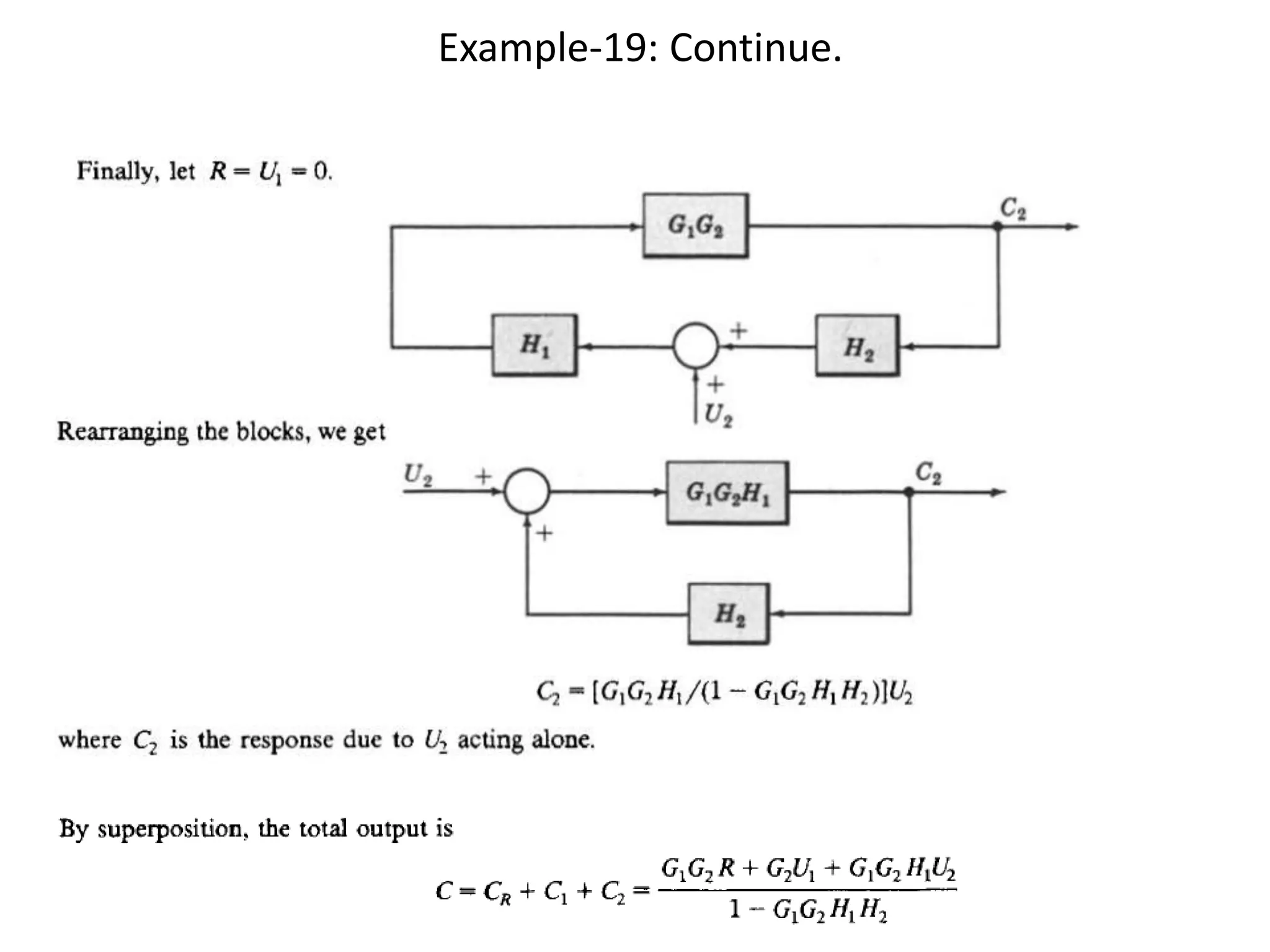
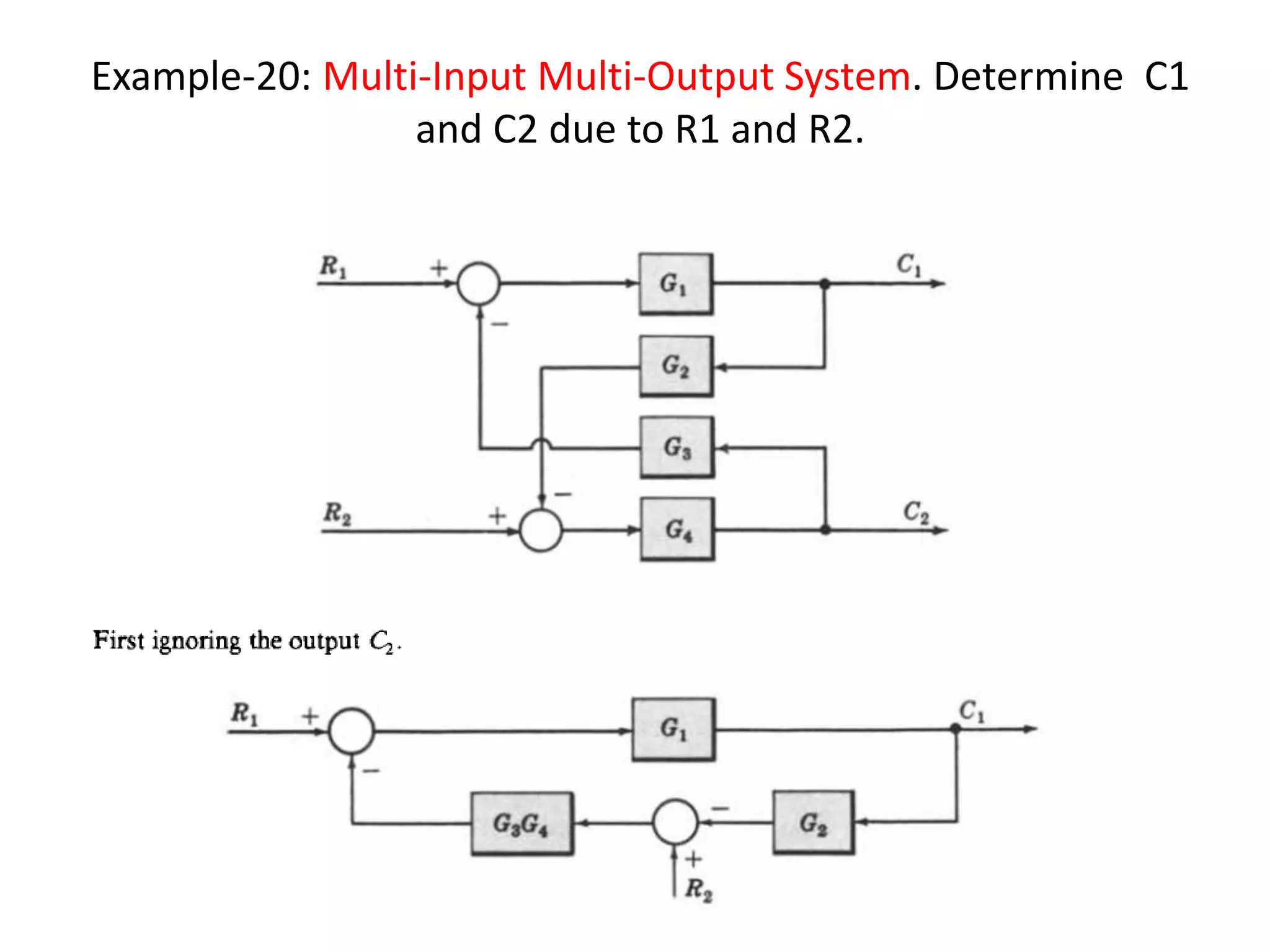
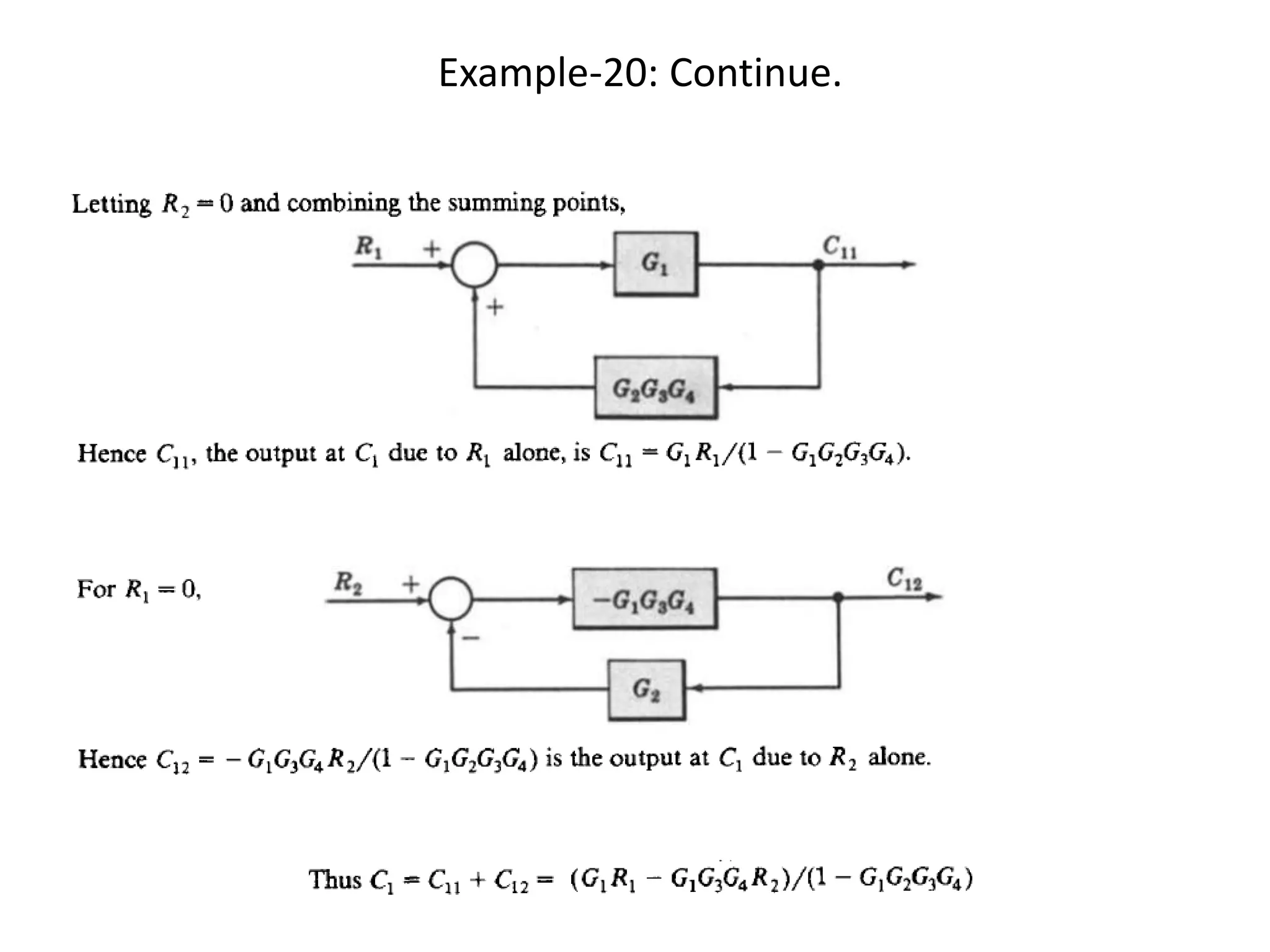
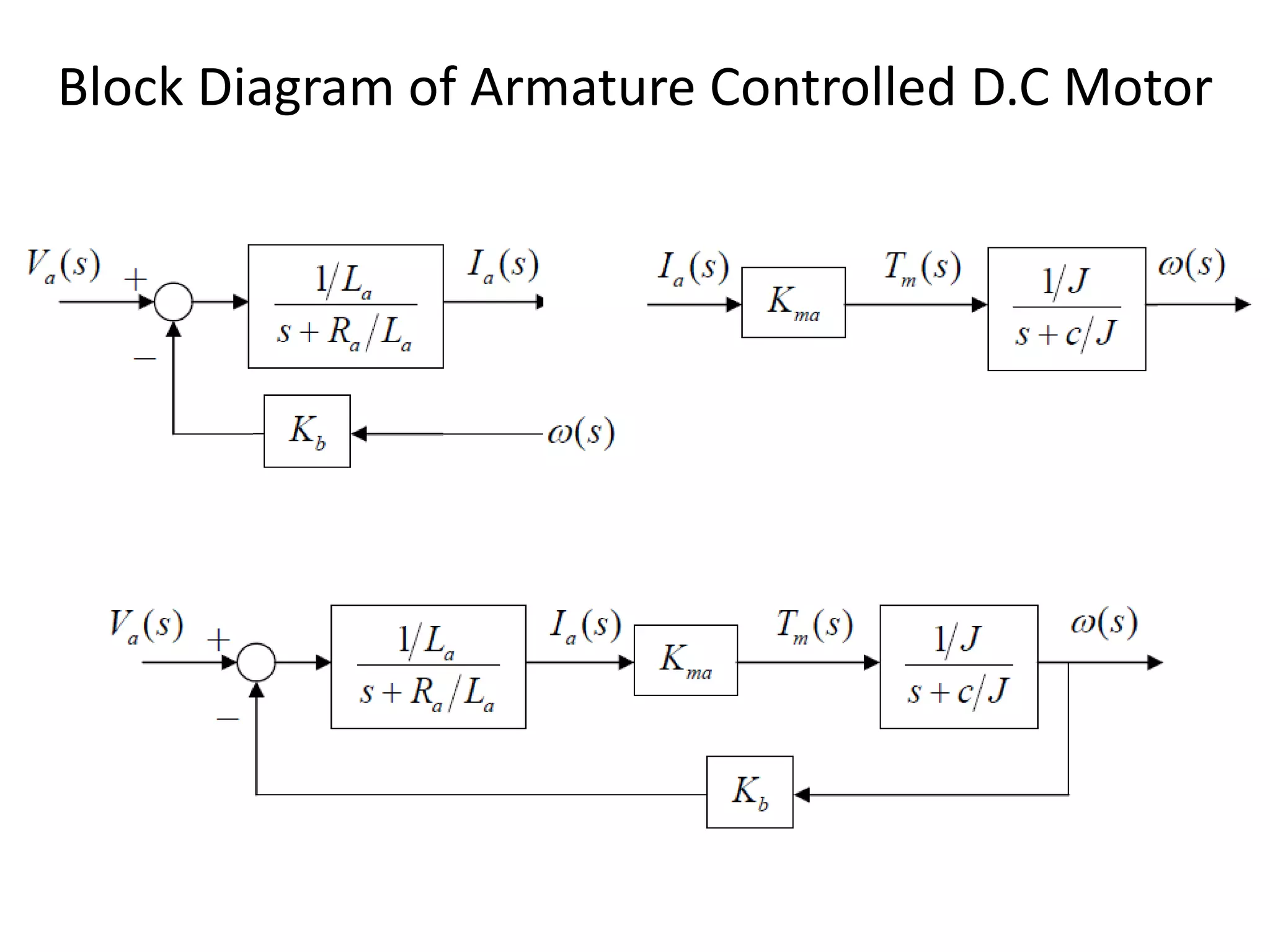
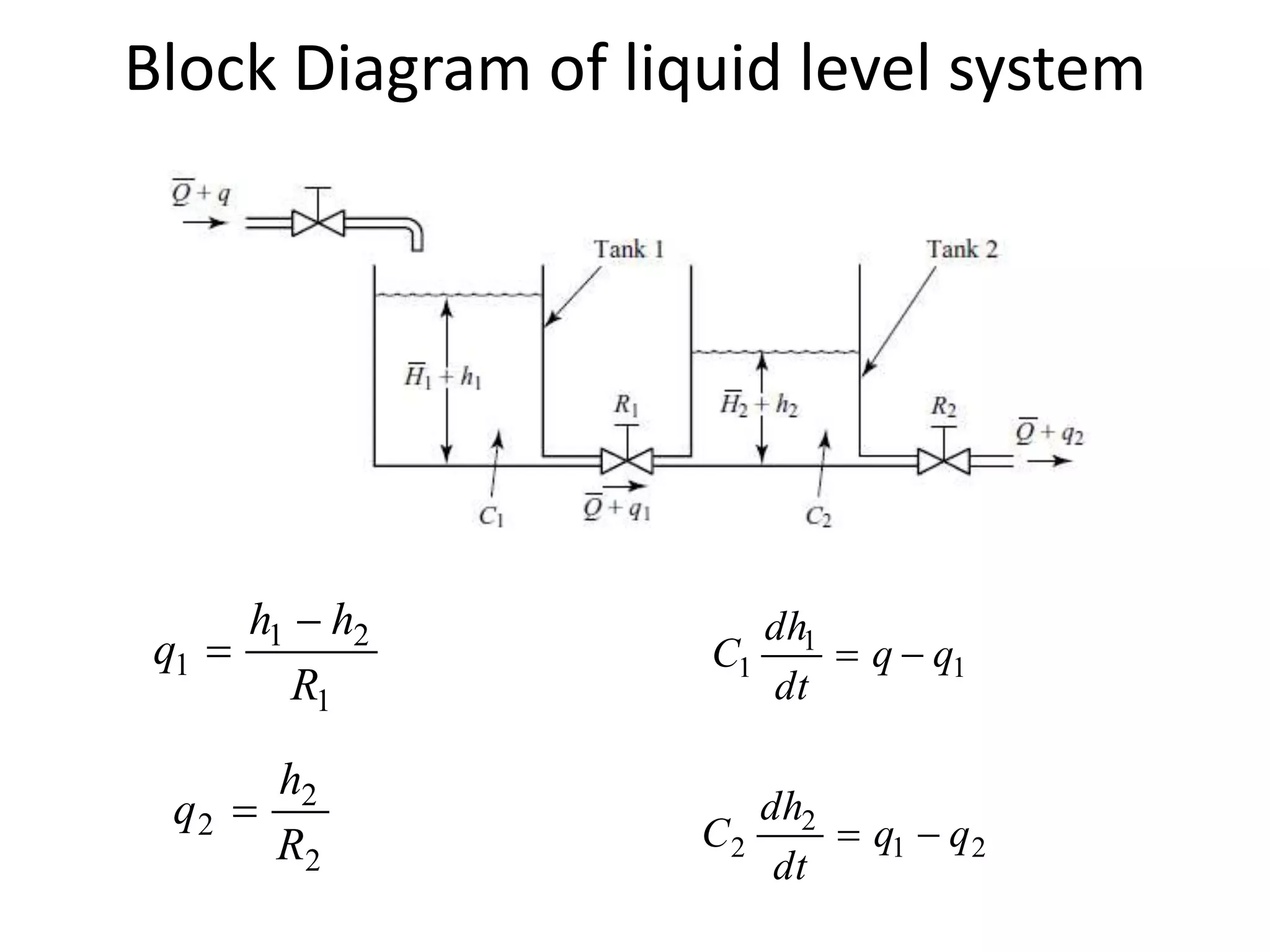
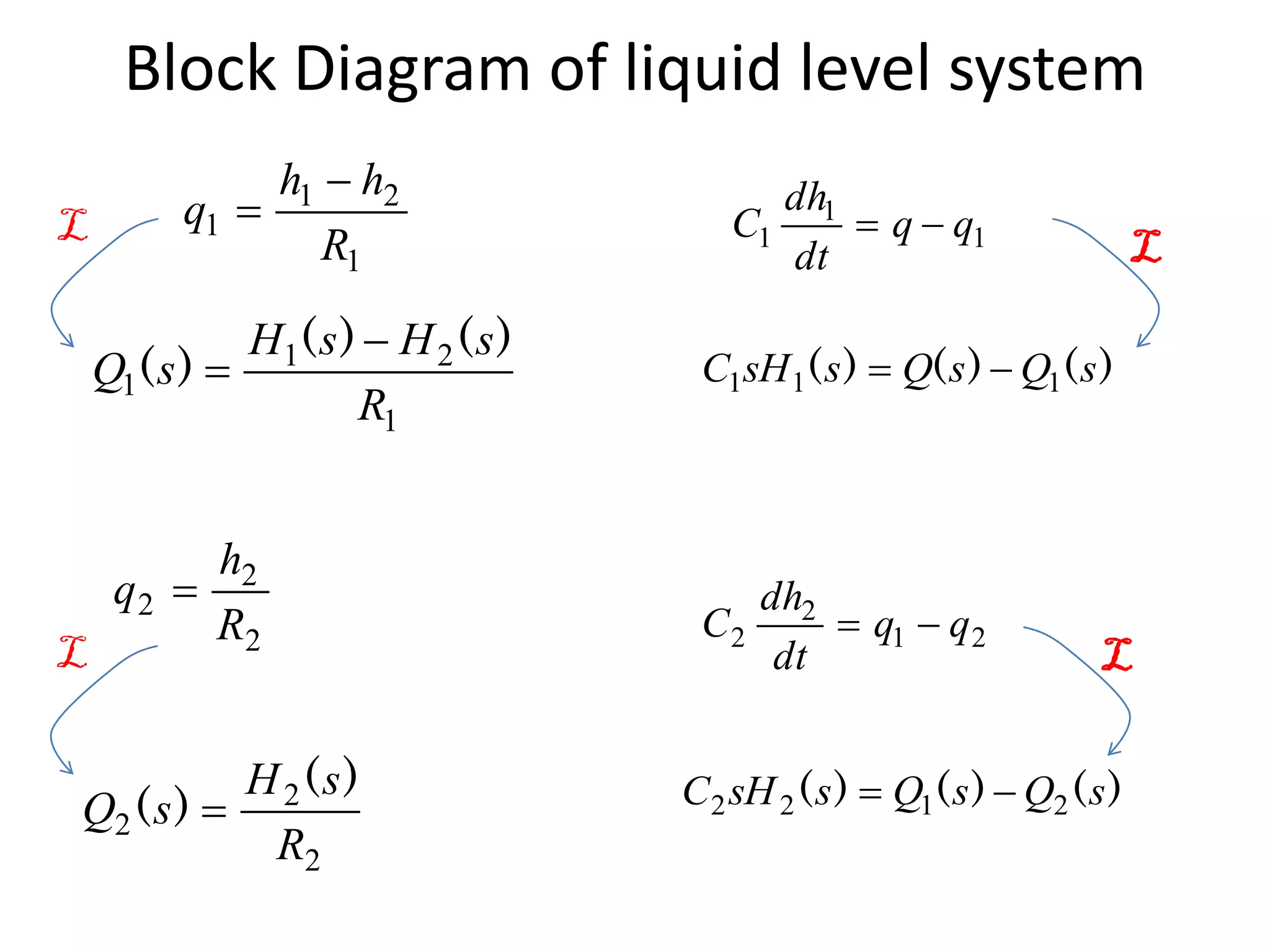
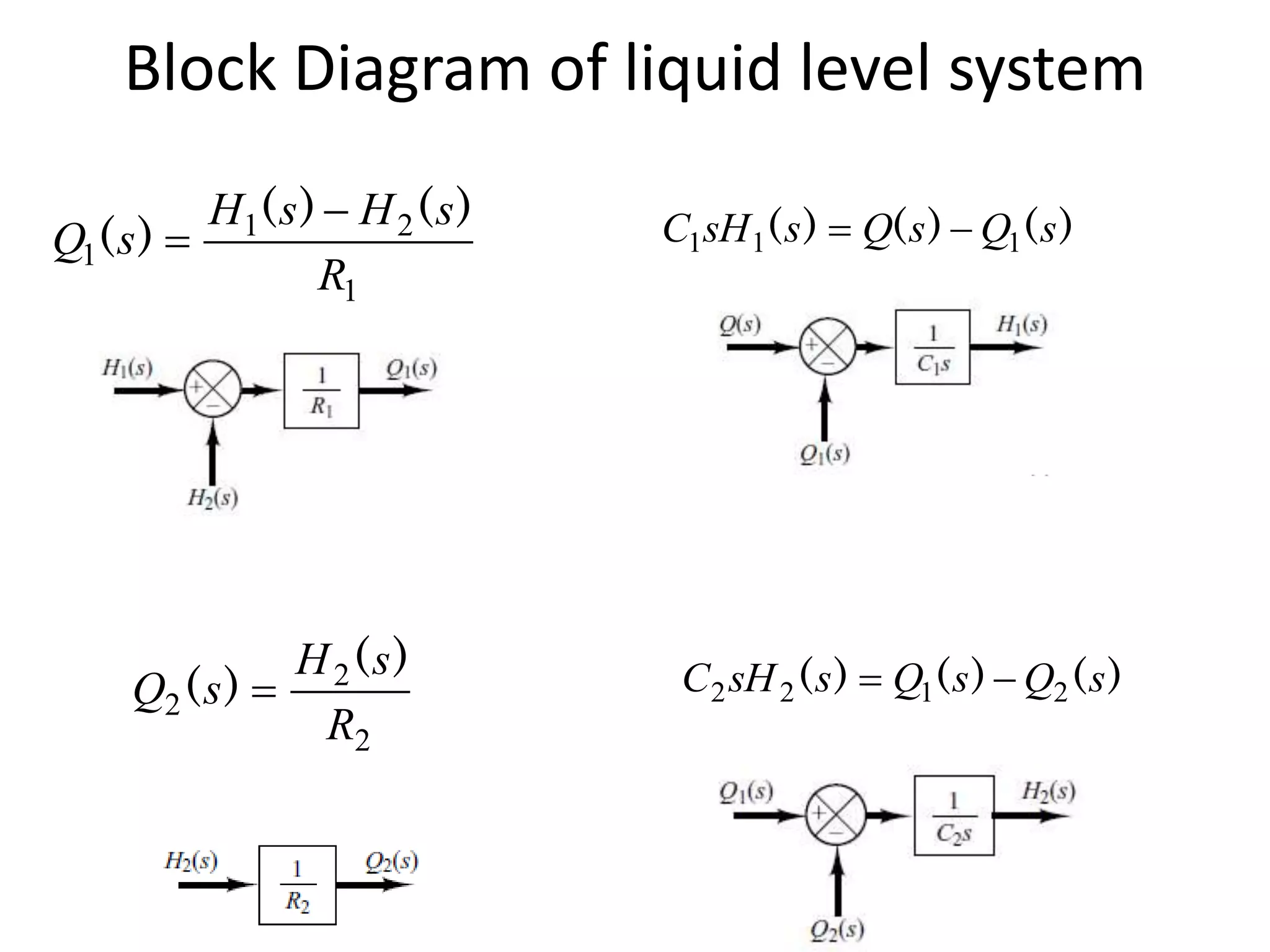
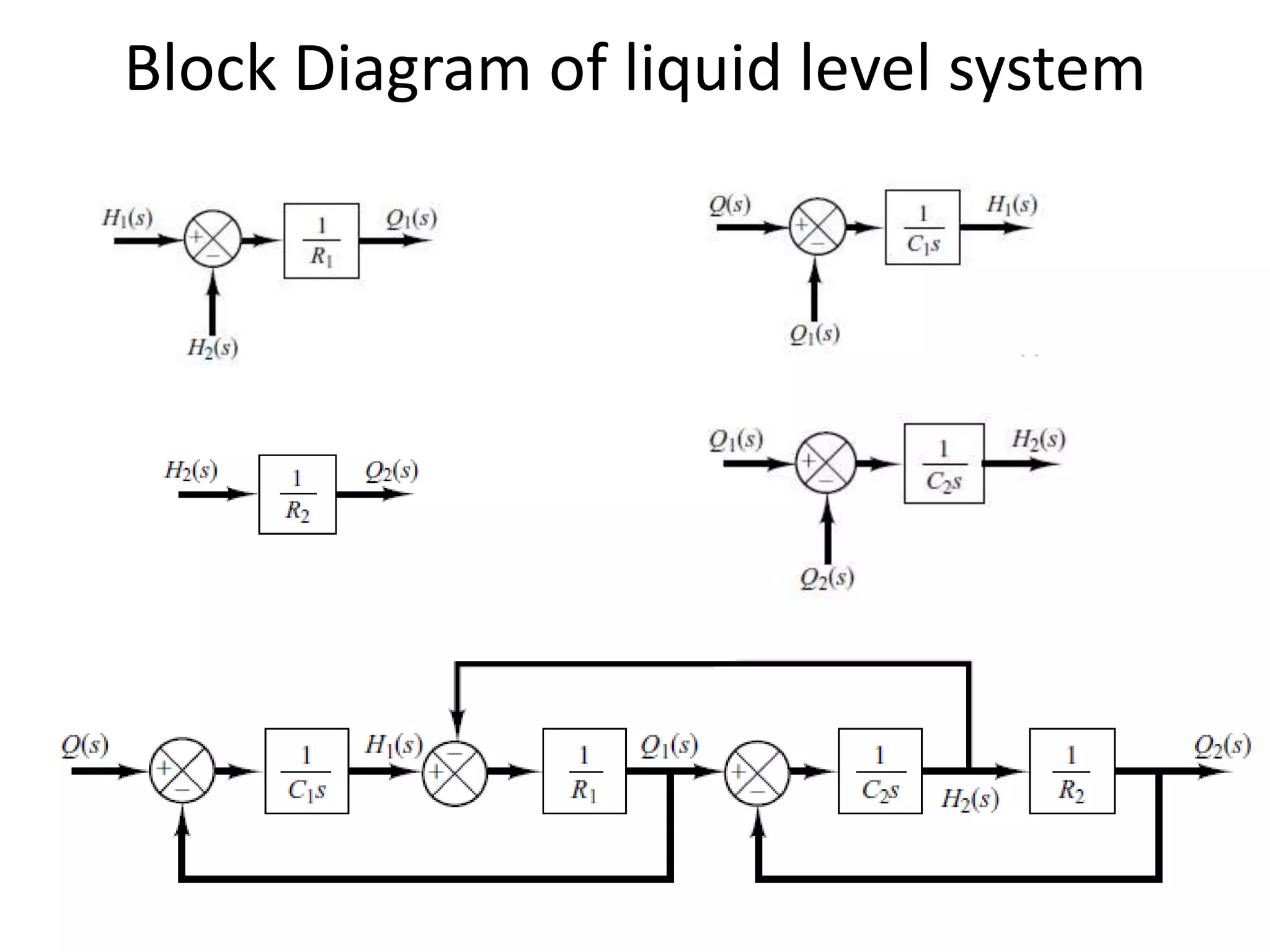

This document provides an introduction to block diagram representation of control systems. It discusses how block diagrams provide a pictorial representation of the relationships between elements in a system using blocks and arrows. The blocks represent system elements or operations, and the arrows represent the direction of signal or information flow. Specific topics covered include summing points, takeoff points, examples of representing equations as block diagrams, and canonical forms.


























![Reduction of multiple subsystem [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/reductionofmultiplesubsystemcompatibilitymode-110418075355-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)