Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Takuya Minagawa
PDF, PPTX
5,533 views
Pn learning takmin
第29回コンピュータbジョン勉強会@関東「有名論文読み会」発表資料
Technology
◦
Related topics:
Computer Vision Insights
•
Read more
13
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 31
2
/ 31
3
/ 31
4
/ 31
5
/ 31
6
/ 31
7
/ 31
8
/ 31
9
/ 31
10
/ 31
11
/ 31
12
/ 31
13
/ 31
14
/ 31
15
/ 31
16
/ 31
17
/ 31
18
/ 31
19
/ 31
20
/ 31
21
/ 31
22
/ 31
23
/ 31
24
/ 31
25
/ 31
26
/ 31
27
/ 31
28
/ 31
29
/ 31
30
/ 31
31
/ 31
More Related Content
PDF
20140131 R-CNN
by
Takuya Minagawa
PDF
ORB-SLAMを動かしてみた
by
Takuya Minagawa
PDF
LiDAR点群とSfM点群との位置合わせ
by
Takuya Minagawa
PDF
Cvpr2017事前読み会
by
Takuya Minagawa
PDF
20180424 orb slam
by
Takuya Minagawa
PDF
cvsaisentan5 Multi View Stereo 3.3
by
Takuya Minagawa
PDF
How to feed myself with computer vision
by
Takuya Minagawa
PDF
20170211クレジットカード認識
by
Takuya Minagawa
20140131 R-CNN
by
Takuya Minagawa
ORB-SLAMを動かしてみた
by
Takuya Minagawa
LiDAR点群とSfM点群との位置合わせ
by
Takuya Minagawa
Cvpr2017事前読み会
by
Takuya Minagawa
20180424 orb slam
by
Takuya Minagawa
cvsaisentan5 Multi View Stereo 3.3
by
Takuya Minagawa
How to feed myself with computer vision
by
Takuya Minagawa
20170211クレジットカード認識
by
Takuya Minagawa
What's hot
PDF
第34回CV勉強会「コンピュテーショナルフォトグラフィ」発表資料
by
Takuya Minagawa
PDF
20160417dlibによる顔器官検出
by
Takuya Minagawa
PDF
20170806 Discriminative Optimization
by
Takuya Minagawa
PDF
「コンピュータビジョン勉強会@関東」紹介資料
by
Takuya Minagawa
PDF
Curiosity driven exploration
by
Takuya Minagawa
PDF
run Keras model on opencv
by
Takuya Minagawa
PDF
LiDAR点群と画像とのマッピング
by
Takuya Minagawa
PDF
Show and tell takmin
by
Takuya Minagawa
PDF
Semantic segmentation2
by
Takuya Minagawa
PDF
[CV勉強会]Active Object Localization with Deep Reinfocement Learning
by
Takuya Minagawa
PDF
object detection with lidar-camera fusion: survey (updated)
by
Takuya Minagawa
PDF
20200910コンピュータビジョン今昔物語(JPTA講演資料)
by
Takuya Minagawa
PDF
3DFeat-Net
by
Takuya Minagawa
PPTX
センシングサイエンティストが経費精算を自動化したらこうなった
by
Core Concept Technologies
PDF
BERT の解剖学: interpret-text による自然言語処理 (NLP) モデル解釈
by
順也 山口
PDF
20180527 ORB SLAM Code Reading
by
Takuya Minagawa
PPTX
AIによる簡単レコメンドシステム実装
by
Core Concept Technologies
PDF
20181130 lidar object detection survey
by
Takuya Minagawa
PPTX
Self-Critical Sequence Training for Image Captioning (関東CV勉強会 CVPR 2017 読み会)
by
Yoshitaka Ushiku
PPTX
ロボットアームをPythonで動かす
by
Core Concept Technologies
第34回CV勉強会「コンピュテーショナルフォトグラフィ」発表資料
by
Takuya Minagawa
20160417dlibによる顔器官検出
by
Takuya Minagawa
20170806 Discriminative Optimization
by
Takuya Minagawa
「コンピュータビジョン勉強会@関東」紹介資料
by
Takuya Minagawa
Curiosity driven exploration
by
Takuya Minagawa
run Keras model on opencv
by
Takuya Minagawa
LiDAR点群と画像とのマッピング
by
Takuya Minagawa
Show and tell takmin
by
Takuya Minagawa
Semantic segmentation2
by
Takuya Minagawa
[CV勉強会]Active Object Localization with Deep Reinfocement Learning
by
Takuya Minagawa
object detection with lidar-camera fusion: survey (updated)
by
Takuya Minagawa
20200910コンピュータビジョン今昔物語(JPTA講演資料)
by
Takuya Minagawa
3DFeat-Net
by
Takuya Minagawa
センシングサイエンティストが経費精算を自動化したらこうなった
by
Core Concept Technologies
BERT の解剖学: interpret-text による自然言語処理 (NLP) モデル解釈
by
順也 山口
20180527 ORB SLAM Code Reading
by
Takuya Minagawa
AIによる簡単レコメンドシステム実装
by
Core Concept Technologies
20181130 lidar object detection survey
by
Takuya Minagawa
Self-Critical Sequence Training for Image Captioning (関東CV勉強会 CVPR 2017 読み会)
by
Yoshitaka Ushiku
ロボットアームをPythonで動かす
by
Core Concept Technologies
Similar to Pn learning takmin
PDF
EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monoc...
by
Kazuyuki Miyazawa
PDF
CVPR2019読み会@関東CV
by
Takanori Ogata
PDF
cvpaper.challenge in CVPR2015 (PRMU2015年12月)
by
cvpaper. challenge
PDF
PFI成果発表会2014発表資料 Where Do You Look?
by
Hokuto Kagaya
PDF
B3スタートアップ コンピュータビジョンの現在と未来にやるべきこと(東京電機大学講演)
by
cvpaper. challenge
PPTX
0517 TECH & BRIDGE MEETING
by
健司 亀本
PPTX
SSII2020 [OS2-02] 教師あり事前学習を凌駕する「弱」教師あり事前学習
by
SSII
PDF
20201010 personreid
by
Takuya Minagawa
PPTX
NeurIPS2019参加報告
by
Masanari Kimura
PDF
機械学習をビジネスに利活用する人たちに対してモデル開発後の実運用フェーズにおける課題とその対策方法
by
日本ディープラーニング協会(JDLA)
PDF
Domain Adaptive Faster R-CNN for Object Detection in the Wild 論文紹介
by
Tsukasa Takagi
PPTX
Cvim saisentan-6-4-tomoaki
by
tomoaki0705
PPTX
CVPR 2017 報告
by
Yu Nishimura
PDF
Semantic segmentation
by
Takuya Minagawa
PPT
Deep Learningの技術と未来
by
Seiya Tokui
PDF
SSII2014 詳細画像識別 (FGVC) @OS2
by
nlab_utokyo
PDF
関西CVPRML勉強会2018 岡本大和 Unsupervised Feature Learning Via Non-Parametric Instanc...
by
Yamato OKAMOTO
PDF
データサイエンスの全体像とデータサイエンティスト
by
The Japan DataScientist Society
PPTX
Cvpr2018 参加報告(速報版)3日目
by
Atsushi Hashimoto
PDF
IROS2020 survey
by
robotpaperchallenge
EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monoc...
by
Kazuyuki Miyazawa
CVPR2019読み会@関東CV
by
Takanori Ogata
cvpaper.challenge in CVPR2015 (PRMU2015年12月)
by
cvpaper. challenge
PFI成果発表会2014発表資料 Where Do You Look?
by
Hokuto Kagaya
B3スタートアップ コンピュータビジョンの現在と未来にやるべきこと(東京電機大学講演)
by
cvpaper. challenge
0517 TECH & BRIDGE MEETING
by
健司 亀本
SSII2020 [OS2-02] 教師あり事前学習を凌駕する「弱」教師あり事前学習
by
SSII
20201010 personreid
by
Takuya Minagawa
NeurIPS2019参加報告
by
Masanari Kimura
機械学習をビジネスに利活用する人たちに対してモデル開発後の実運用フェーズにおける課題とその対策方法
by
日本ディープラーニング協会(JDLA)
Domain Adaptive Faster R-CNN for Object Detection in the Wild 論文紹介
by
Tsukasa Takagi
Cvim saisentan-6-4-tomoaki
by
tomoaki0705
CVPR 2017 報告
by
Yu Nishimura
Semantic segmentation
by
Takuya Minagawa
Deep Learningの技術と未来
by
Seiya Tokui
SSII2014 詳細画像識別 (FGVC) @OS2
by
nlab_utokyo
関西CVPRML勉強会2018 岡本大和 Unsupervised Feature Learning Via Non-Parametric Instanc...
by
Yamato OKAMOTO
データサイエンスの全体像とデータサイエンティスト
by
The Japan DataScientist Society
Cvpr2018 参加報告(速報版)3日目
by
Atsushi Hashimoto
IROS2020 survey
by
robotpaperchallenge
More from Takuya Minagawa
PDF
R-SCoRe: Revisiting Scene Coordinate Regression for Robust Large-Scale Visual...
by
Takuya Minagawa
PDF
「第63回コンピュータビジョン勉強会@関東」発表資料 CVの社会実装について考えていたらゲームを作っていた話
by
Takuya Minagawa
PDF
第61回CV勉強会「CVPR2024読み会」(前編)発表資料:State Space Models for Event Cameras
by
Takuya Minagawa
PDF
ろくに電子工作もしたことない人間がIoT用ミドルウェアを作った話(IoTLT vol112 発表資料)
by
Takuya Minagawa
PDF
Machine Learning Operations (MLOps): Overview, Definition, and Architecture
by
Takuya Minagawa
PDF
MobileNeRF
by
Takuya Minagawa
PDF
点群SegmentationのためのTransformerサーベイ
by
Takuya Minagawa
PDF
Learning to Solve Hard Minimal Problems
by
Takuya Minagawa
PDF
ConditionalPointDiffusion.pdf
by
Takuya Minagawa
PDF
楽しいコンピュータビジョンの受託仕事
by
Takuya Minagawa
PDF
20210711 deepI2P
by
Takuya Minagawa
PDF
2020/07/04 BSP-Net (CVPR2020)
by
Takuya Minagawa
PDF
20200704 bsp net
by
Takuya Minagawa
PDF
20190825 vins mono
by
Takuya Minagawa
PDF
20190706cvpr2019_3d_shape_representation
by
Takuya Minagawa
PDF
20190307 visualslam summary
by
Takuya Minagawa
PDF
Visual slam
by
Takuya Minagawa
PDF
20190131 lidar-camera fusion semantic segmentation survey
by
Takuya Minagawa
PDF
2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation
by
Takuya Minagawa
PDF
object detection with lidar-camera fusion: survey
by
Takuya Minagawa
R-SCoRe: Revisiting Scene Coordinate Regression for Robust Large-Scale Visual...
by
Takuya Minagawa
「第63回コンピュータビジョン勉強会@関東」発表資料 CVの社会実装について考えていたらゲームを作っていた話
by
Takuya Minagawa
第61回CV勉強会「CVPR2024読み会」(前編)発表資料:State Space Models for Event Cameras
by
Takuya Minagawa
ろくに電子工作もしたことない人間がIoT用ミドルウェアを作った話(IoTLT vol112 発表資料)
by
Takuya Minagawa
Machine Learning Operations (MLOps): Overview, Definition, and Architecture
by
Takuya Minagawa
MobileNeRF
by
Takuya Minagawa
点群SegmentationのためのTransformerサーベイ
by
Takuya Minagawa
Learning to Solve Hard Minimal Problems
by
Takuya Minagawa
ConditionalPointDiffusion.pdf
by
Takuya Minagawa
楽しいコンピュータビジョンの受託仕事
by
Takuya Minagawa
20210711 deepI2P
by
Takuya Minagawa
2020/07/04 BSP-Net (CVPR2020)
by
Takuya Minagawa
20200704 bsp net
by
Takuya Minagawa
20190825 vins mono
by
Takuya Minagawa
20190706cvpr2019_3d_shape_representation
by
Takuya Minagawa
20190307 visualslam summary
by
Takuya Minagawa
Visual slam
by
Takuya Minagawa
20190131 lidar-camera fusion semantic segmentation survey
by
Takuya Minagawa
2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation
by
Takuya Minagawa
object detection with lidar-camera fusion: survey
by
Takuya Minagawa
Pn learning takmin
1.
CV勉強会@関東 発表資料 P-N Learning:
Bootstrapping Binary Classifiers by Structural Constraints 2015/05/30 takmin
2.
自己紹介 テクニカル・ソリューション・アーキテクト 皆川 卓也(みながわ たくや) フリーエンジニア(ビジョン&ITラボ) 「コンピュータビジョン勉強会@関東」主催 博士(工学) テクニカル・ソリューション・アーキテクト 皆川
卓也(みながわ たくや) フリーエンジニア(ビジョン&ITラボ) 「コンピュータビジョン勉強会@関東」主催 博士(工学) 略歴: 1999-2003年 日本HP(後にアジレント・テクノロジーへ分社)にて、ITエンジニアとしてシステム構築、プリ セールス、プロジェクトマネジメント、サポート等の業務に従事 2004-2009年 コンピュータビジョンを用いたシステム/アプリ/サービス開発等に従事 2007-2010年 慶應義塾大学大学院 後期博士課程にて、コンピュータビジョンを専攻 単位取得退学後、博士号取得(2014年) 2009年-現在 フリーランスとして、コンピュータビジョンのコンサル/研究/開発等に従事 2 http://visitlab.jp
3.
紹介する論文 3 P-N Learning:
Bootstrapping Binary Classifiers by Structural Constraints Z. Kalal, J. Matas, K. Mikolajczyk CVPR 2010 P-N Learningという二値分類を行う識別器をラベルなし サンプルから学習させるパラダイムの定式化 やってることはトラッキングだけど、論文自体はもっと上段に 構えてる デモ動画 https://www.youtube.com/watch?v=1GhNXHCQGsM OpenCV3.0に実装される予定
4.
P-N Learningを用いたトラッキング 4 1つのサンプル(黄色)から物体検出器を学習し、赤のよ うな違う姿勢の物体も検出
5.
P-N Learning 5 ラベルつきサンプルとラベルなしサンプルを使用して二 値分類の識別器を学習
サンプル間の依存関係(構造)を利用して、サンプルにラ ベルを付与する Positive Constraints Positiveラベルをつける構造パターン Negative Constraints Negativeラベルをつける構造パターン
6.
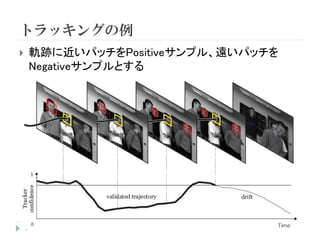
トラッキングの例 6 軌跡に近いパッチをPositiveサンプル、遠いパッチを Negativeサンプルとする
7.
ラベルなしサンプルの活用例 7 半教師有学習 EMアルゴリズム
self-learning co-training
8.
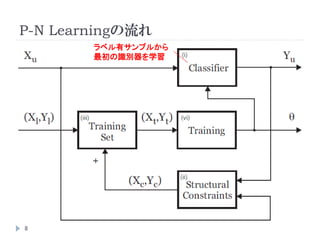
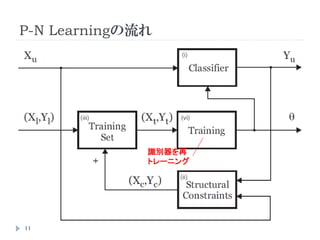
P-N Learningの流れ 8 ラベル有サンプルから 最初の識別器を学習
9.
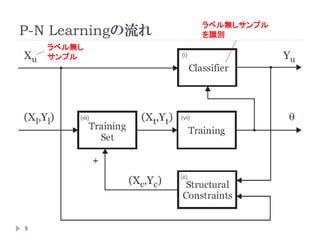
P-N Learningの流れ 9 ラベル無しサンプル を識別 ラベル無し サンプル
10.
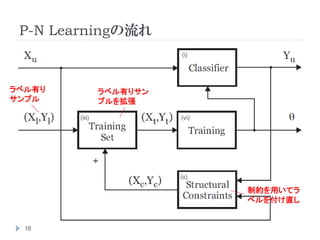
P-N Learningの流れ 10 ラベル有り サンプル 制約を用いてラ ベルを付け直し ラベル有りサン プルを拡張
11.
P-N Learningの流れ 11 識別器を再 トレーニング
12.
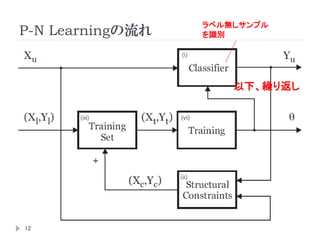
P-N Learningの流れ 12 ラベル無しサンプル を識別 以下、繰り返し
13.
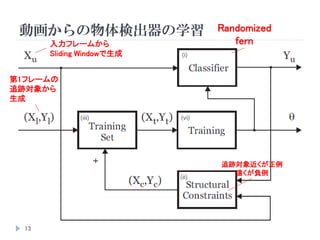
動画からの物体検出器の学習 13 第1フレームの 追跡対象から 生成 Randomized fern 追跡対象近くが正例 遠くが負例 入力フレームから Sliding Windowで生成
14.
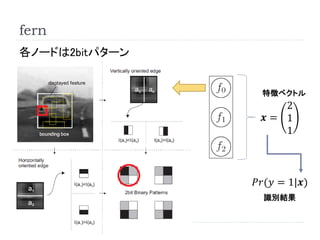
fern 14 各ノードは2bitパターン 𝑃𝑟(𝑦 = 1|𝒙) 𝒙
= 2 1 1 特徴ベクトル 識別結果
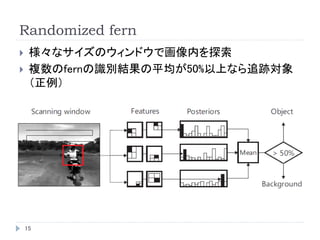
15.
Randomized fern 15 様々なサイズのウィンドウで画像内を探索
複数のfernの識別結果の平均が50%以上なら追跡対象 (正例)
16.
Structural Constraints 16 Lucas-Kanade Trackerで追跡
17.
Structural Constraints 17 識別器で物体と判定された近くのパッチを正例サンプルに追加
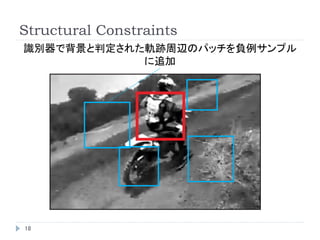
18.
Structural Constraints 18 識別器で背景と判定された軌跡周辺のパッチを負例サンプル に追加
19.
動画から学習の流れ 19 最初の識別器は第1フレームにラベルづけされた対象領 域をランダムにアフィン変換した300枚の正例を用いて学 習。 第1フレームにラベルづけされた対象領域をLKトラッカー で追跡。
LKトラッカーが追跡に失敗したり、軌跡よりも遠い位置に 識別器が物体を検出した場合 学習サンプルを全て破棄 学習済み識別器を用いてLKトラッカーを再初期化 最後のフレームまで学習された識別器=Final Detector
20.
収束条件 20 識別器でラベル無しデータにラベルをつけたら、 当然間違えるものも出てくるよね?発散しな い? どのようなケースでP-N Learningが収束するの かを理論的に検証
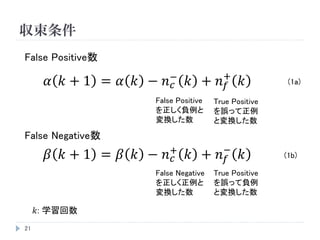
21.
収束条件 21 False Positive数 False Negative数 𝛼
𝑘 + 1 = 𝛼 𝑘 − 𝑛 𝑐 − 𝑘 + 𝑛 𝑓 + 𝑘 𝑘: 学習回数 𝛽 𝑘 + 1 = 𝛽 𝑘 − 𝑛 𝑐 + 𝑘 + 𝑛 𝑓 − 𝑘 False Positive を正しく負例と 変換した数 True Negative を誤って正例 と変換した数 False Negative を正しく正例と 変換した数 True Positive を誤って負例 と変換した数 (1a) (1b)
22.
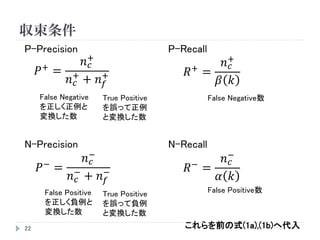
収束条件 22 P-Precision 𝑃+ = 𝑛 𝑐 + 𝑛
𝑐 + + 𝑛 𝑓 + 𝑃− = 𝑛 𝑐 − 𝑛 𝑐 − + 𝑛 𝑓 − 𝑅+ = 𝑛 𝑐 + 𝛽 𝑘 𝑅− = 𝑛 𝑐 − 𝛼 𝑘 P-Recall N-Precision N-Recall False Positive を正しく負例と 変換した数 True Negative を誤って正例と 変換した数 False Negative を正しく正例と 変換した数 True Positive を誤って負例 と変換した数 False Negative数 False Positive数 これらを前の式(1a),(1b)へ代入
23.
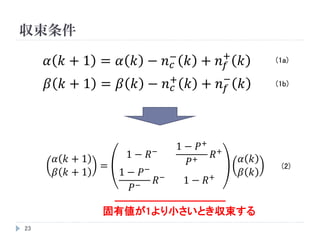
収束条件 23 𝛼 𝑘 +
1 𝛽 𝑘 + 1 = 1 − 𝑅− 1 − 𝑃+ 𝑃+ 𝑅+ 1 − 𝑃− 𝑃− 𝑅− 1 − 𝑅+ 𝛼 𝑘 𝛽 𝑘 (2) 固有値が1より小さいとき収束する 𝛼 𝑘 + 1 = 𝛼 𝑘 − 𝑛 𝑐 − 𝑘 + 𝑛 𝑓 + 𝑘 𝛽 𝑘 + 1 = 𝛽 𝑘 − 𝑛 𝑐 + 𝑘 + 𝑛 𝑓 − 𝑘 (1a) (1b)
24.
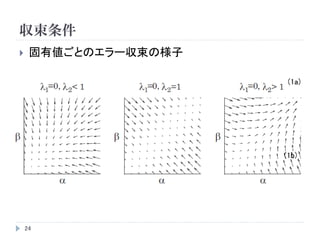
収束条件 24 固有値ごとのエラー収束の様子 (1a) (1b)
25.
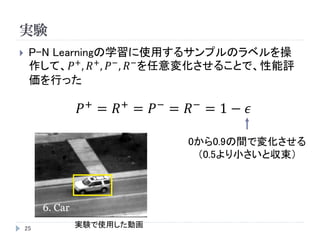
実験 25 P-N Learningの学習に使用するサンプルのラベルを操 作して、𝑃+ ,
𝑅+ , 𝑃− , 𝑅− を任意変化させることで、性能評 価を行った 𝑃+ = 𝑅+ = 𝑃− = 𝑅− = 1 − 𝜖 0から0.9の間で変化させる (0.5より小さいと収束) 実験で使用した動画
26.
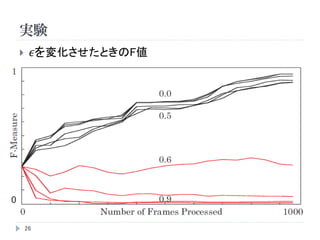
実験 26 𝜖を変化させたときのF値
27.
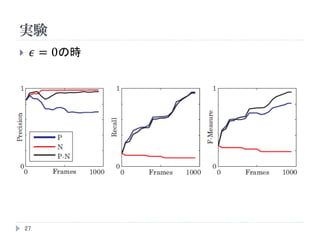
実験 27 𝜖 =
0の時
28.
実験 28 以下の10個の動画に対して実験 カメラの動きやモーションブラーあり
29.
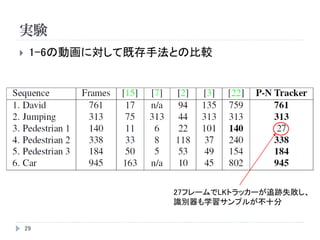
実験 29 1-6の動画に対して既存手法との比較 27フレームでLKトラッカーが追跡失敗し、 識別器も学習サンプルが不十分
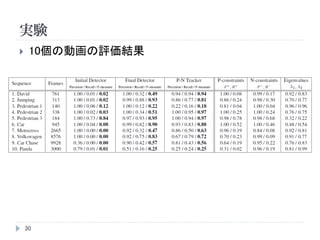
30.
実験 30 10個の動画の評価結果
31.
結論 31 P-N Learningというラベル有り及びラベル無しの学習サ ンプルを用いて識別器を学習させる新しいフレームワー クを提案
ラベル無しサンプルが構造的な場合に適用可能 収束条件を明確にした 動画に対して適用し、最初の1フレームのラベルからオン ラインで物体検出器を学習 時空間の制約を使用 20fpsで学習 state-of-the-artの追跡性能
Download





















![[CV勉強会]Active Object Localization with Deep Reinfocement Learning](https://cdn.slidesharecdn.com/ss_thumbnails/20160204objectdetectionrl-160206032348-thumbnail.jpg?width=640&height=640&fit=bounds)
















![SSII2020 [OS2-02] 教師あり事前学習を凌駕する「弱」教師あり事前学習](https://cdn.slidesharecdn.com/ss_thumbnails/200611ssii2020os2weaksupervision-200609142553-thumbnail.jpg?width=640&height=640&fit=bounds)