ORB-SLAMとは?
5
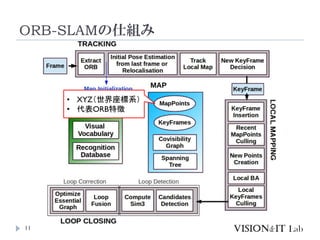
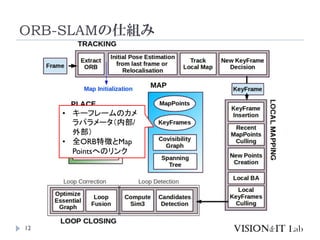
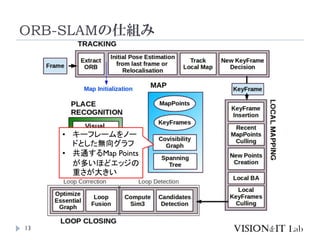
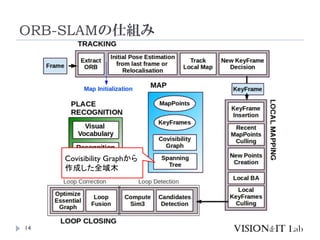
単眼カメラのVisual SLAM
Mur-Artal, R., Montiel, J. M. M., & Tardos, J. D. (2015).
ORB-SLAM:AVersatile and Accurate Monocular
SLAM System. IEEETransactions on Robotics,
ソースコード:
https://github.com/raulmur/ORB_SLAM2
動画:
https://www.youtube.com/watch?v=ufvPS5wJAx0
6.
その他有名なVisual SLAM論文
6
PTAM
Klein, G., & Murray, D. (2007). Parallel tracking and mapping for
small AR workspaces. ISMAR.
TrackingとMappingを別スレッドで動かすことでリアルタイム動
作
FASTで取得した特徴点を画像パッチでマッチングして追跡
DTAM
Newcombe, R.A., Lovegrove, S. J., & Davison,A. J. (2011). DTAM:
DenseTracking and Mapping in Real-Time. ICCV.
特徴点ではなく画素の値からDepthを推定することで密な地
図を構築(要GPU)
7.
その他有名なVisual SLAM論文
7
LSD-SLAM
Engel, J., Schops,T., & Cremers, D. (2014). LSD-SLAM: Large-
Scale Direct monocular SLAM. ECCV
画像の輝度勾配が大きいところのみDepth推定することで高
速化
SVO
Forster, C., Pizzoli, M., & Scaramuzza, D. (2014). SVO: Fast semi-
direct monocular visual odometry. ICRA
地図の作製は特徴点ベースで行い(キーフレームのみ)、ト
ラッキング時に特徴点周辺の輝度が合うようにカメラポーズ
推定









![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)













![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)