Download as PDF, PPTX



























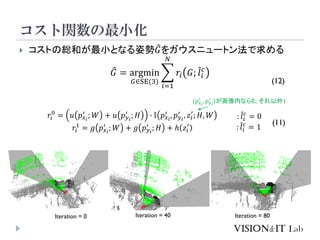






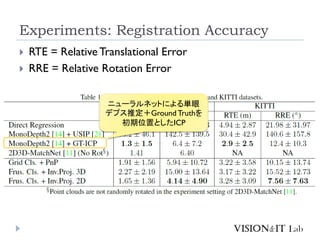









This document summarizes a paper titled "DeepI2P: Image-to-Point Cloud Registration via Deep Classification". The paper proposes a method for estimating the camera pose within a point cloud map using a deep learning model. The model first classifies whether points in the point cloud fall within the camera's frustum or image grid. It then performs pose optimization to estimate the camera pose by minimizing the projection error of inlier points onto the image. The method achieves more accurate camera pose estimation compared to existing techniques based on feature matching or depth estimation. It provides a new approach for camera localization using point cloud maps without requiring cross-modal feature learning.






![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]AutoAugment: LearningAugmentation Strategies from Data & Learning Data...](https://cdn.slidesharecdn.com/ss_thumbnails/dlp0712f-190719034120-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]VoxelPose: Towards Multi-Camera 3D Human Pose Estimation in Wild Envir...](https://cdn.slidesharecdn.com/ss_thumbnails/20201023voxelposekuboshizuma-201023025841-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Swin Transformer: Hierarchical Vision Transformer using Shifted Windows](https://cdn.slidesharecdn.com/ss_thumbnails/swintransformer-210514020542-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2021 [OS2-03] 自己教師あり学習における対照学習の基礎と応用](https://cdn.slidesharecdn.com/ss_thumbnails/os2-04-210605061641-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Xception: Deep Learning with Depthwise Separable Convolutions](https://cdn.slidesharecdn.com/ss_thumbnails/2017-06-22-170623004409-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)





![SSII2021 [OS3-01] 設備や環境の高品質計測点群取得と自動モデル化技術](https://cdn.slidesharecdn.com/ss_thumbnails/os3-02-210605062048-thumbnail.jpg?width=640&height=640&fit=bounds)













![[DL輪読会]PV-RCNN: Point-Voxel Feature Set Abstraction for 3D Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/pvrcnn-200311050009-thumbnail.jpg?width=640&height=640&fit=bounds)
![[3D勉強会@関東] Deep Reinforcement Learning of Volume-guided Progressive View Inpa...](https://cdn.slidesharecdn.com/ss_thumbnails/201908313dmeeting-190831035350-thumbnail.jpg?width=640&height=640&fit=bounds)









































