Recommended
PDF
20190307 visualslam summary
PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
PPTX
PDF
画像局所特徴量と特定物体認識 - SIFTと最近のアプローチ -
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
PDF
SLAMチュートリアル大会資料(ORB-SLAM)
PPTX
PPTX
Direct Sparse Odometryの解説
PDF
PDF
20180527 ORB SLAM Code Reading
PPTX
PDF
PDF
3次元レジストレーション(PCLデモとコード付き)
PDF
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
PDF
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日
PDF
MIRU2013チュートリアル:SIFTとそれ以降のアプローチ
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
PDF
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜
PDF
PPTX
PDF
Cartographer と Autoware を用いた自律走行
PDF
PDF
PDF
PDF
PPTX
[DL輪読会]YOLOv4: Optimal Speed and Accuracy of Object Detection
PPTX
[DL輪読会]Real-Time Semantic Stereo Matching
PDF
PDF
PDF
Cartographer を用いた 3D SLAM
More Related Content
PDF
20190307 visualslam summary
PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
PPTX
PDF
画像局所特徴量と特定物体認識 - SIFTと最近のアプローチ -
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
PDF
SLAMチュートリアル大会資料(ORB-SLAM)
PPTX
PPTX
Direct Sparse Odometryの解説
What's hot
PDF
PDF
20180527 ORB SLAM Code Reading
PPTX
PDF
PDF
3次元レジストレーション(PCLデモとコード付き)
PDF
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
PDF
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日
PDF
MIRU2013チュートリアル:SIFTとそれ以降のアプローチ
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
PDF
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜
PDF
PPTX
PDF
Cartographer と Autoware を用いた自律走行
PDF
PDF
PDF
PDF
PPTX
[DL輪読会]YOLOv4: Optimal Speed and Accuracy of Object Detection
PPTX
[DL輪読会]Real-Time Semantic Stereo Matching
PDF
Similar to 20180424 orb slam
PDF
PDF
Cartographer を用いた 3D SLAM
PDF
AIのラボからロボティクスへ --- 東大松尾研究室のWRS2020パートナーロボットチャレンジへの挑戦
PDF
物体検知(Meta Study Group 発表資料)
PDF
PDF
PDF
PDF
Open3DでSLAM入門 PyCon Kyushu 2018
PDF
PDF
PDF
PDF
R-SCoRe: Revisiting Scene Coordinate Regression for Robust Large-Scale Visual...
ODP
PPTX
Robot frontier lesson3 2018
PDF
20130727 cv machine_learning@tokyo webmining
PDF
NEDO特別講座_画像処理・AI技術活用コース_後編
PDF
TensorFlow Object Detection API を使った取り組み@つくばチャレンジ2017
DOCX
PPTX
[DL輪読会]Differentiable Mapping Networks: Learning Structured Map Representatio...
PDF
Robotpaper.Challenge 2019-09 ver2
More from Takuya Minagawa
PDF
20190706cvpr2019_3d_shape_representation
PDF
2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation
PDF
object detection with lidar-camera fusion: survey (updated)
PDF
20200910コンピュータビジョン今昔物語(JPTA講演資料)
PDF
PDF
run Keras model on opencv
PDF
点群SegmentationのためのTransformerサーベイ
PDF
20181130 lidar object detection survey
PDF
20190131 lidar-camera fusion semantic segmentation survey
PDF
ろくに電子工作もしたことない人間がIoT用ミドルウェアを作った話(IoTLT vol112 発表資料)
PDF
PDF
Learning to Solve Hard Minimal Problems
PDF
PDF
ConditionalPointDiffusion.pdf
PDF
「第63回コンピュータビジョン勉強会@関東」発表資料 CVの社会実装について考えていたらゲームを作っていた話
PDF
Machine Learning Operations (MLOps): Overview, Definition, and Architecture
PDF
第61回CV勉強会「CVPR2024読み会」(前編)発表資料:State Space Models for Event Cameras
PDF
PDF
PDF
2020/07/04 BSP-Net (CVPR2020)
Recently uploaded
PDF
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと...
PDF
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ
PDF
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup
PPTX
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1
20180424 orb slam 1. 2. 3. 4. 5. 紹介するコード
5
ORB SLAM2
https://github.com/raulmur/ORB_SLAM2
人工知能?
機械学習使ってません
ARの世界では有名な研究/コード
私が書いたコードではない
仕事でずっとこれのカスタマイズに格闘してたので
紹介
カスタマイズされたコードは出せないので、元の
コードについて解説
6. 7. ORB-SLAMとは?
7
単眼カメラのVisual SLAM
Mur-Artal, R., Montiel, J. M. M., & Tardos, J. D. (2015).
ORB-SLAM:AVersatile and Accurate Monocular
SLAM System. IEEETransactions on Robotics,
ソースコード:
https://github.com/raulmur/ORB_SLAM2
動画:
https://www.youtube.com/watch?v=ufvPS5wJAx0
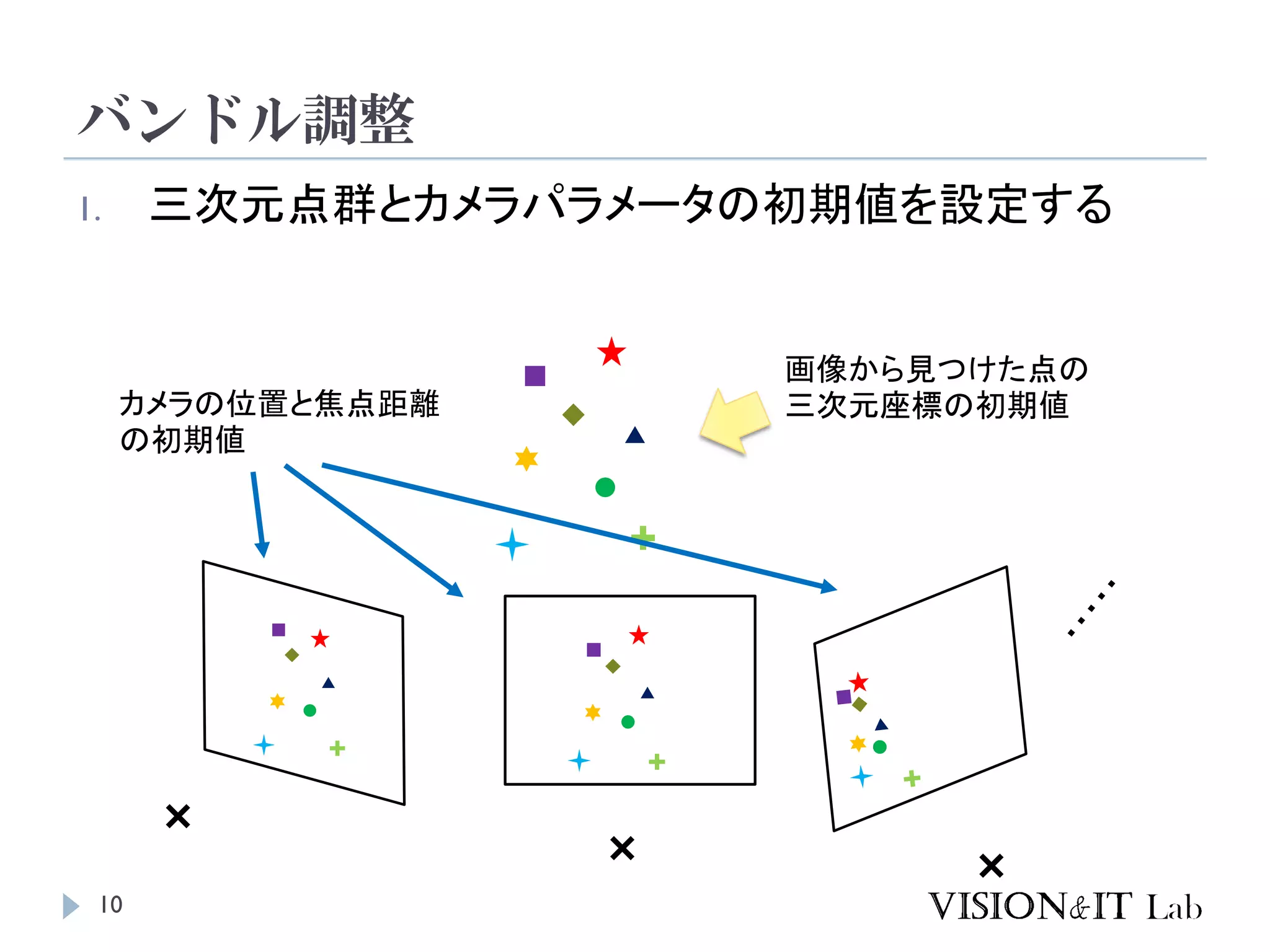
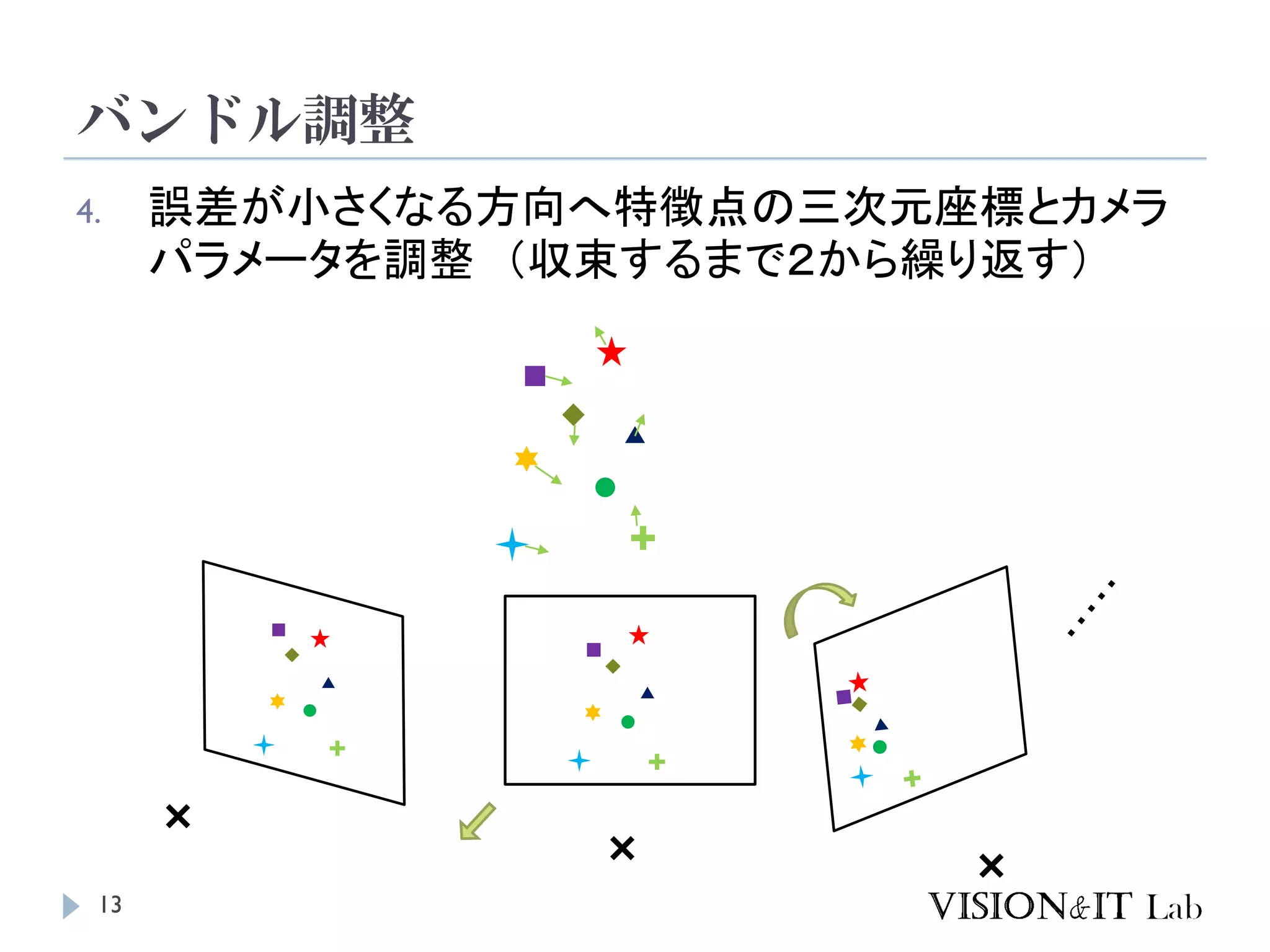
8. 9. Structure from Motion (SfM)
9
同じ対象を撮影した複数の画像(例えば動画)から、対
象の三次元形状を復元する
バンドル調整を用いて、複数のカメラの相対位置、焦点距
離、対象の三次元点座標を同時に推定する
<バンドル調整>
測定結果とパラメータから誤差を計算し、誤差を小さくする方向にパ
ラメータを調整していく
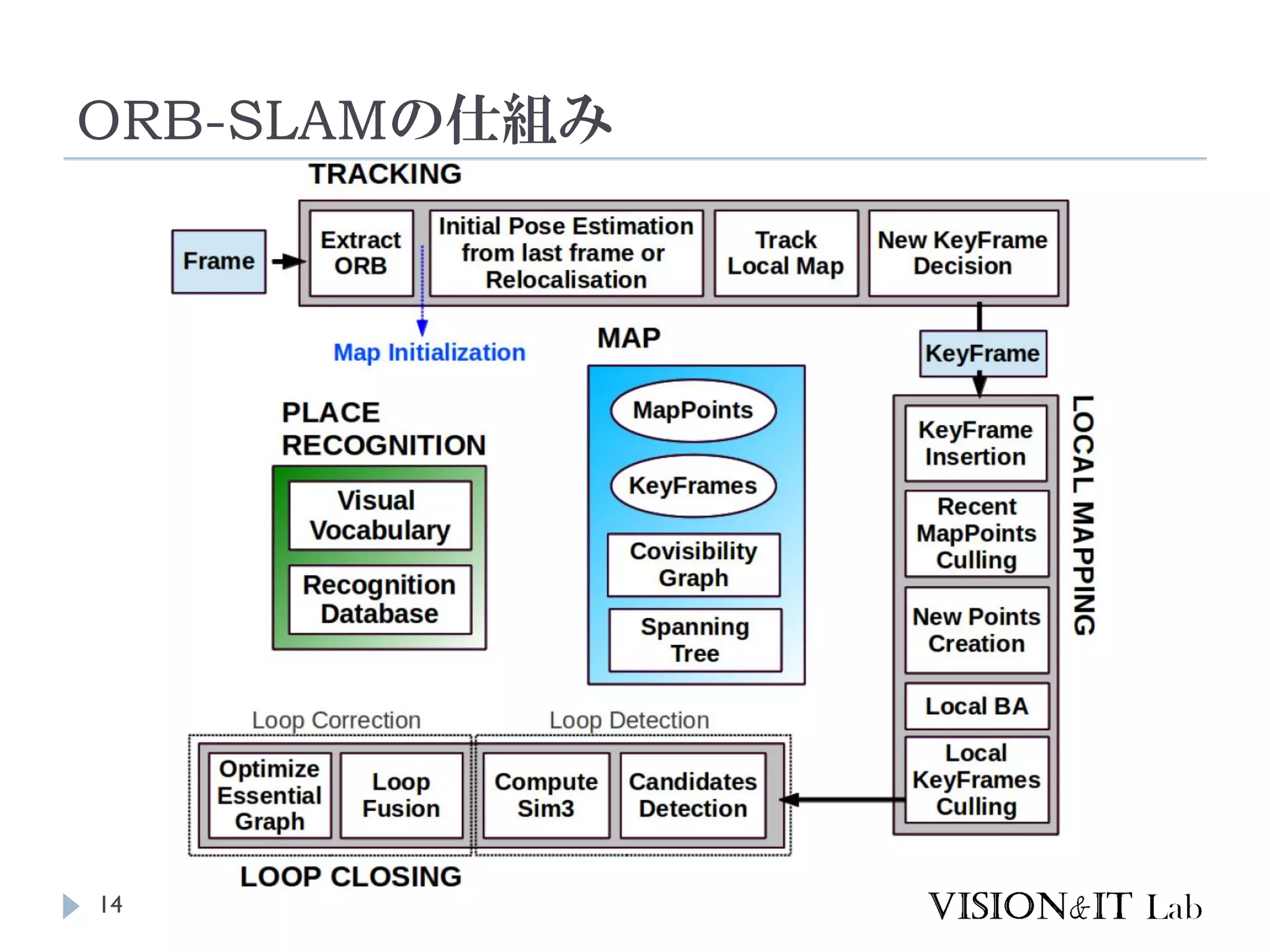
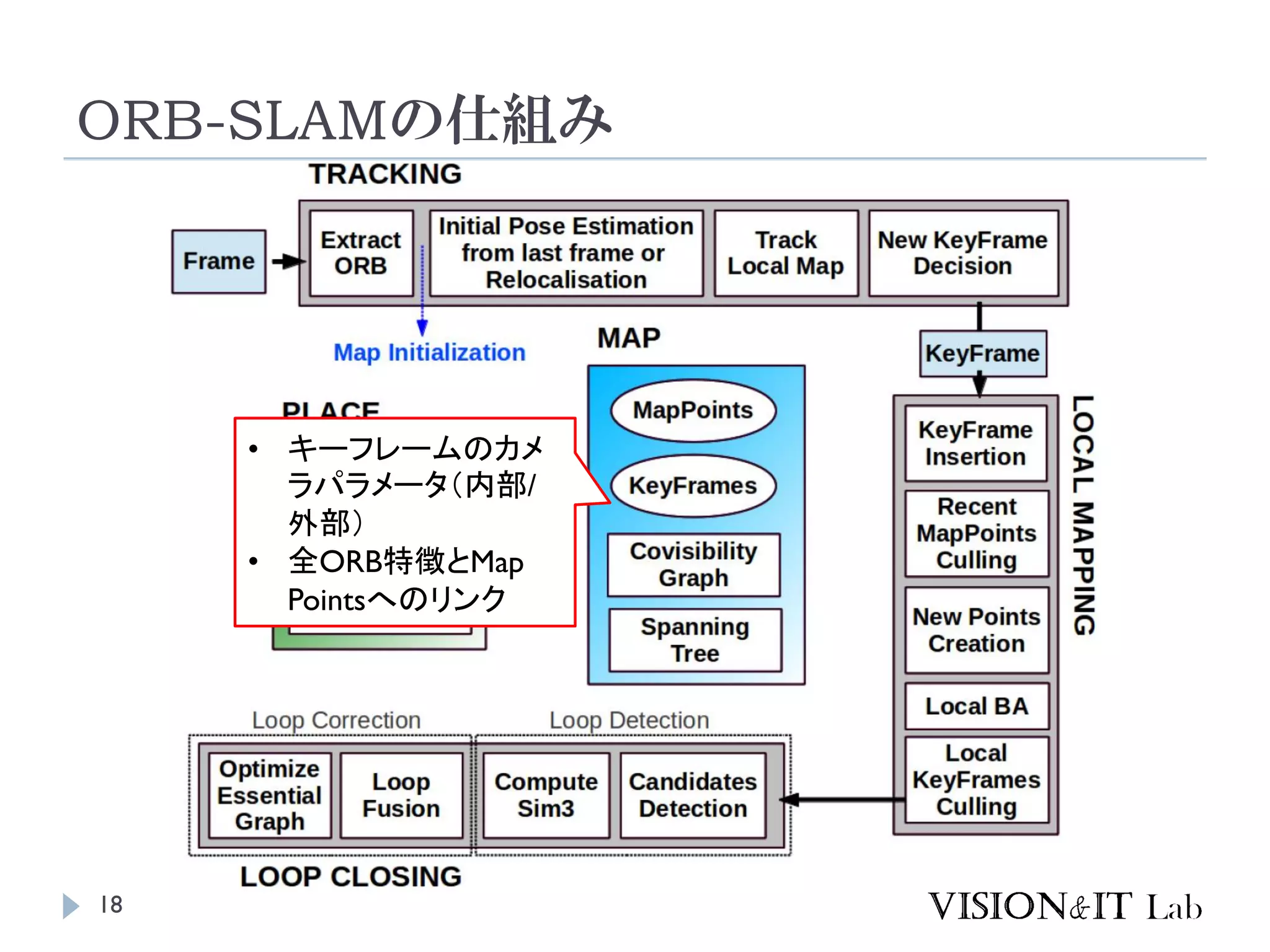
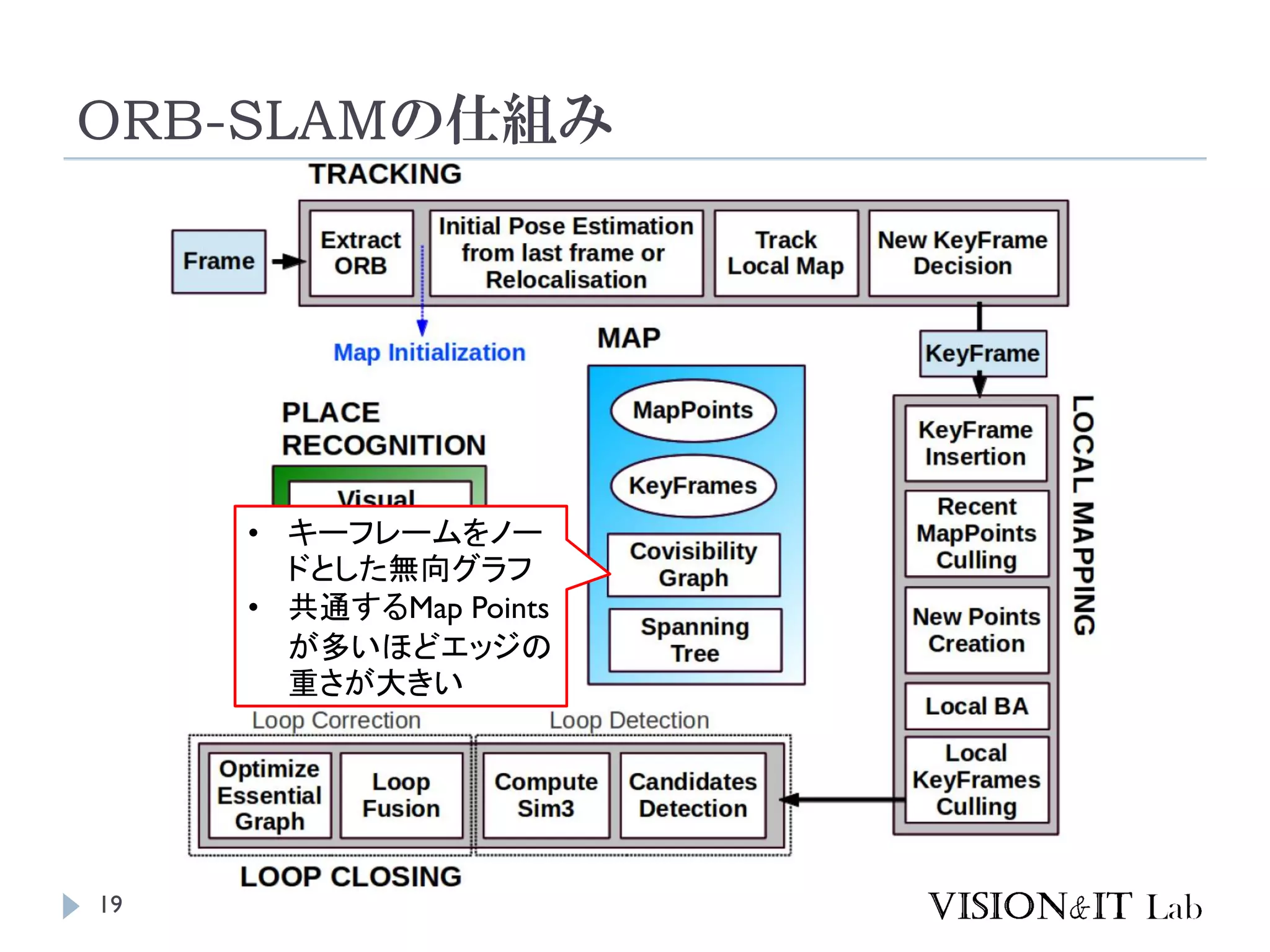
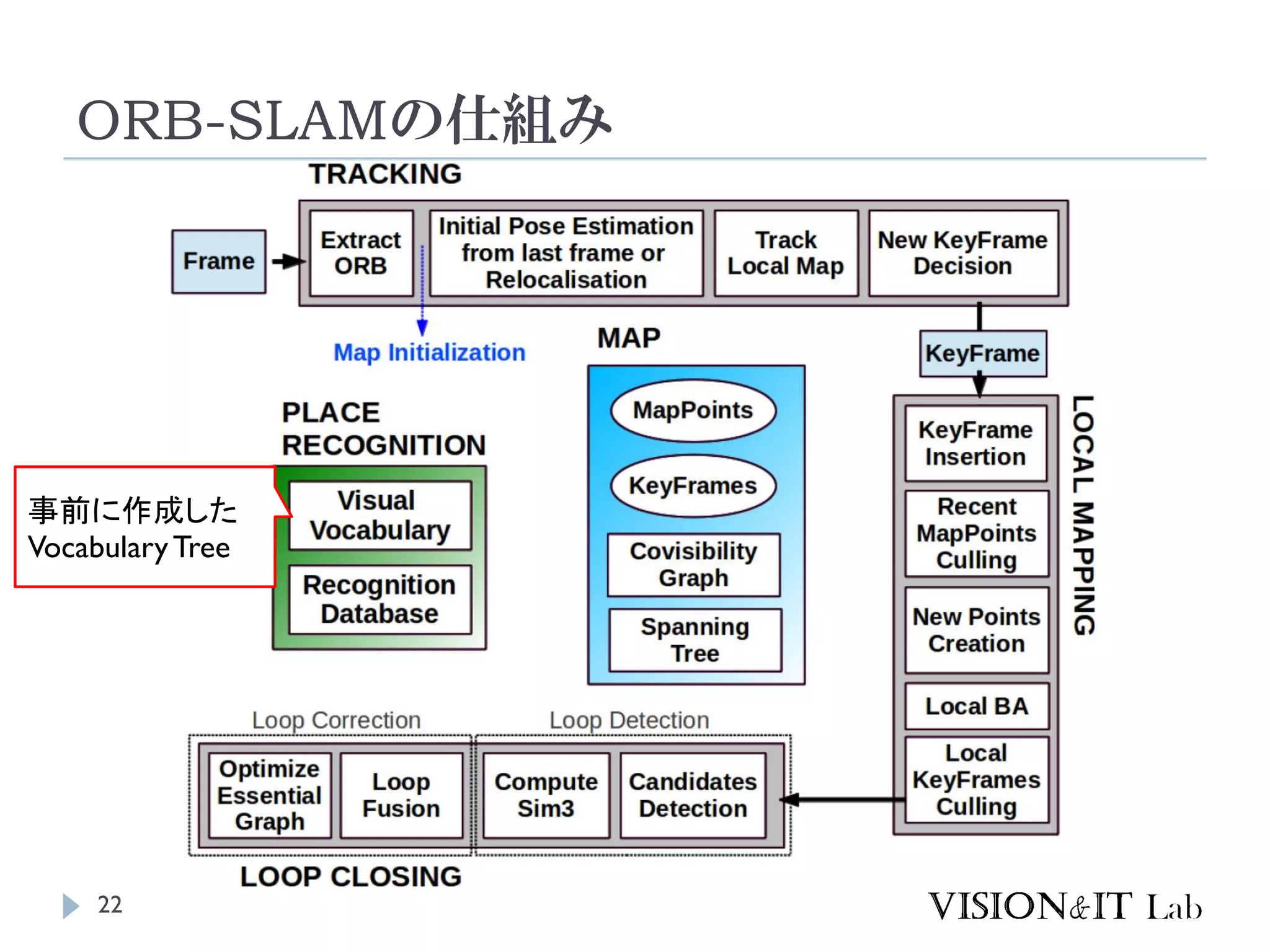
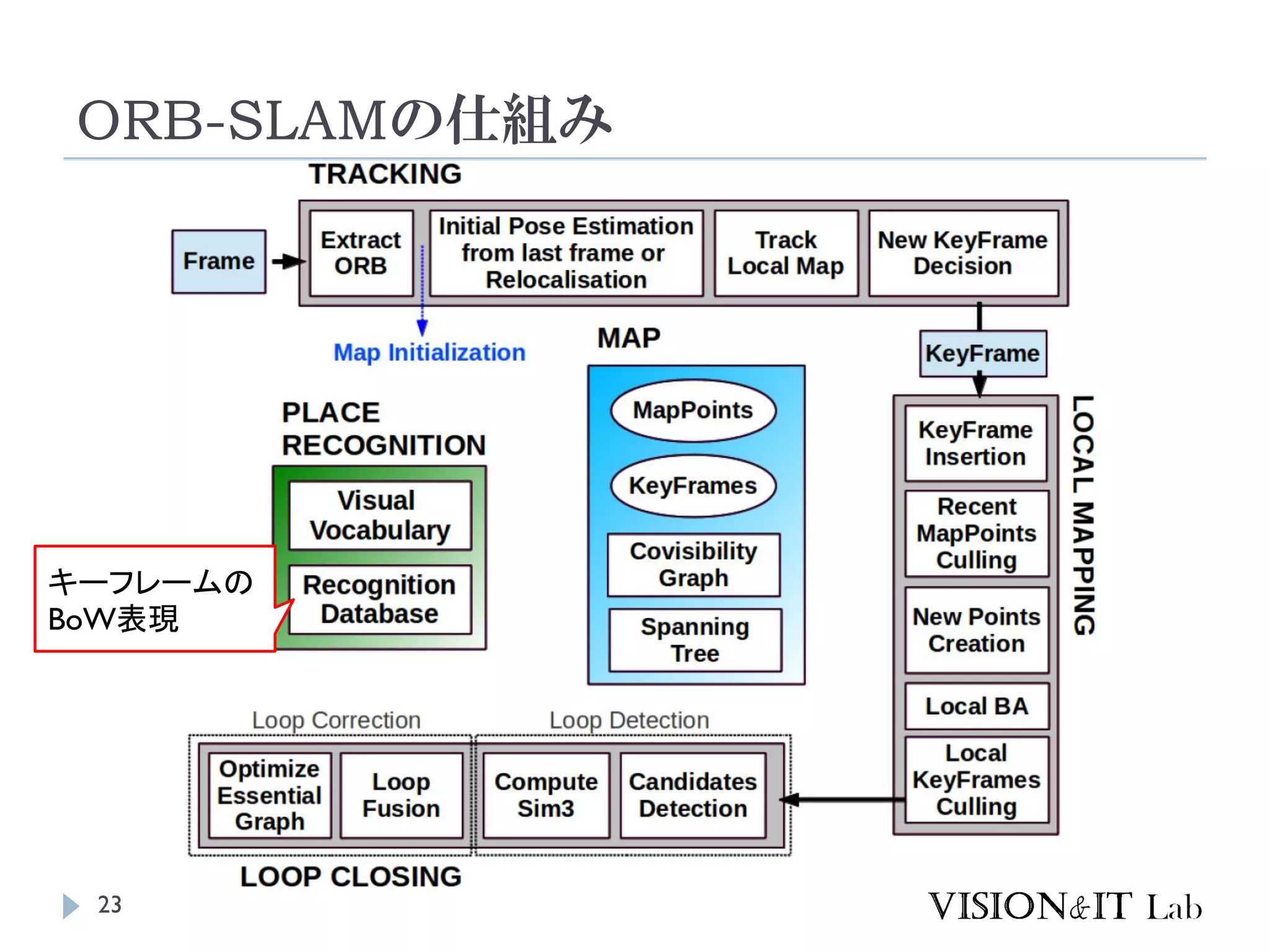
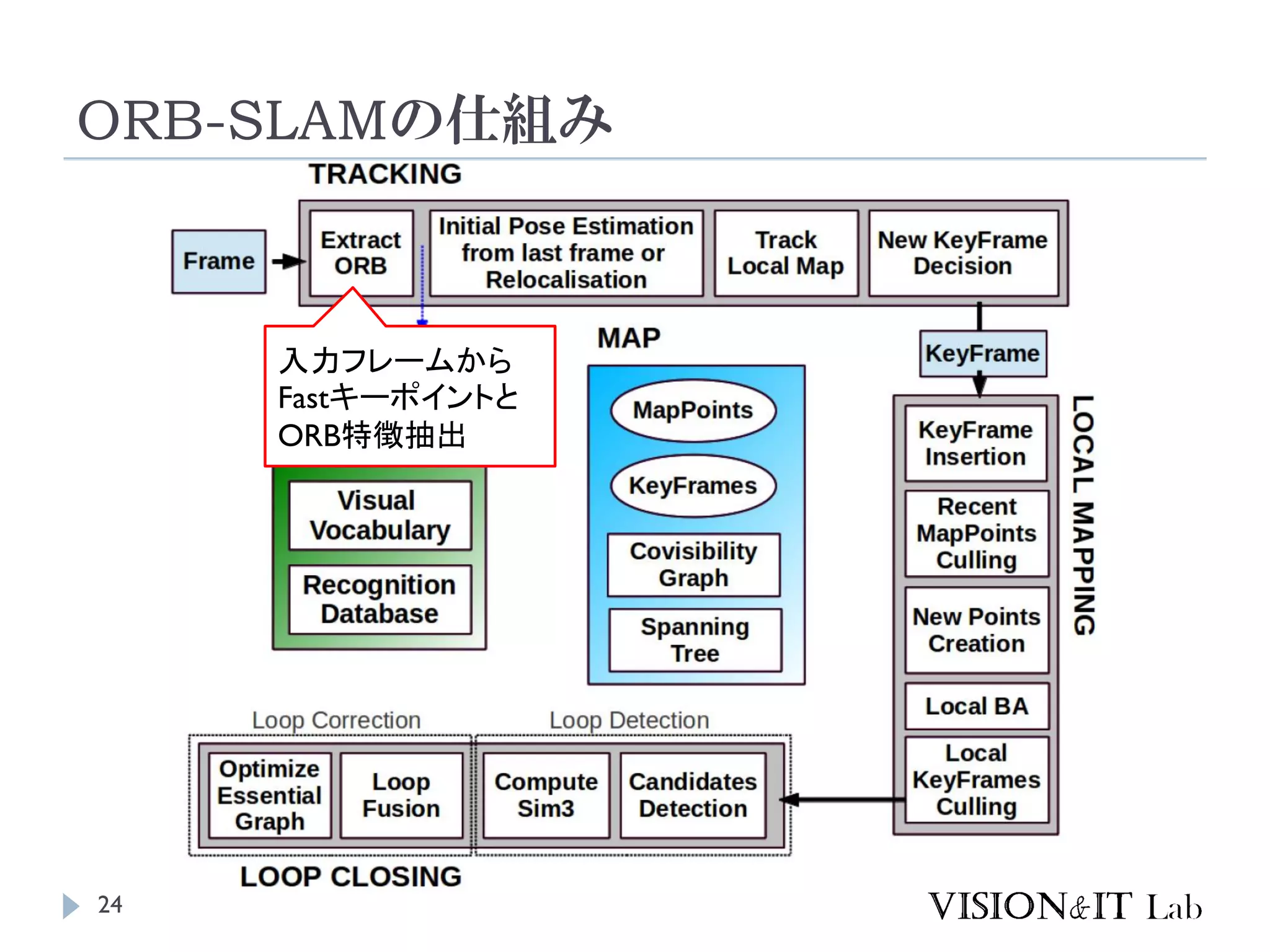
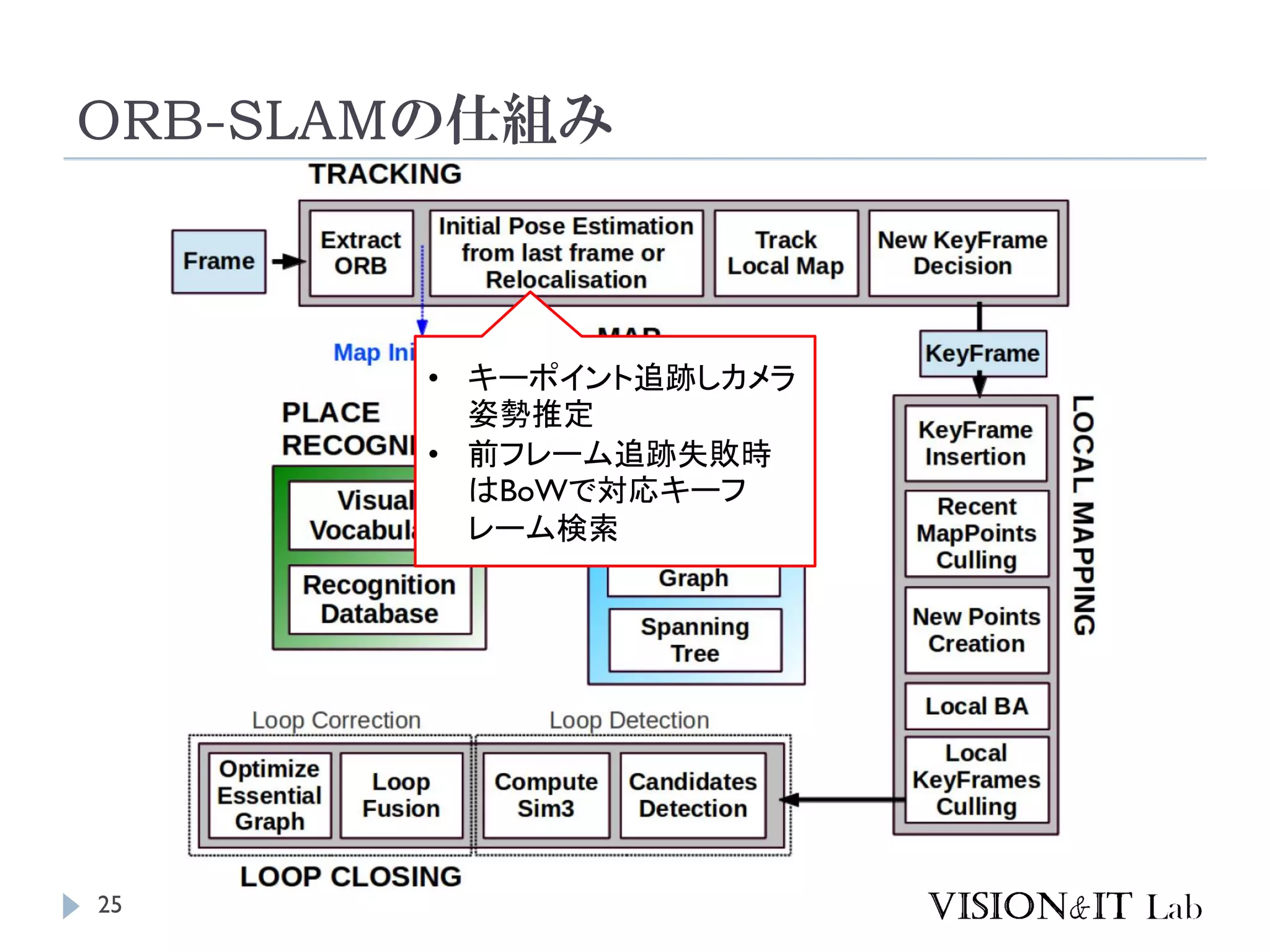
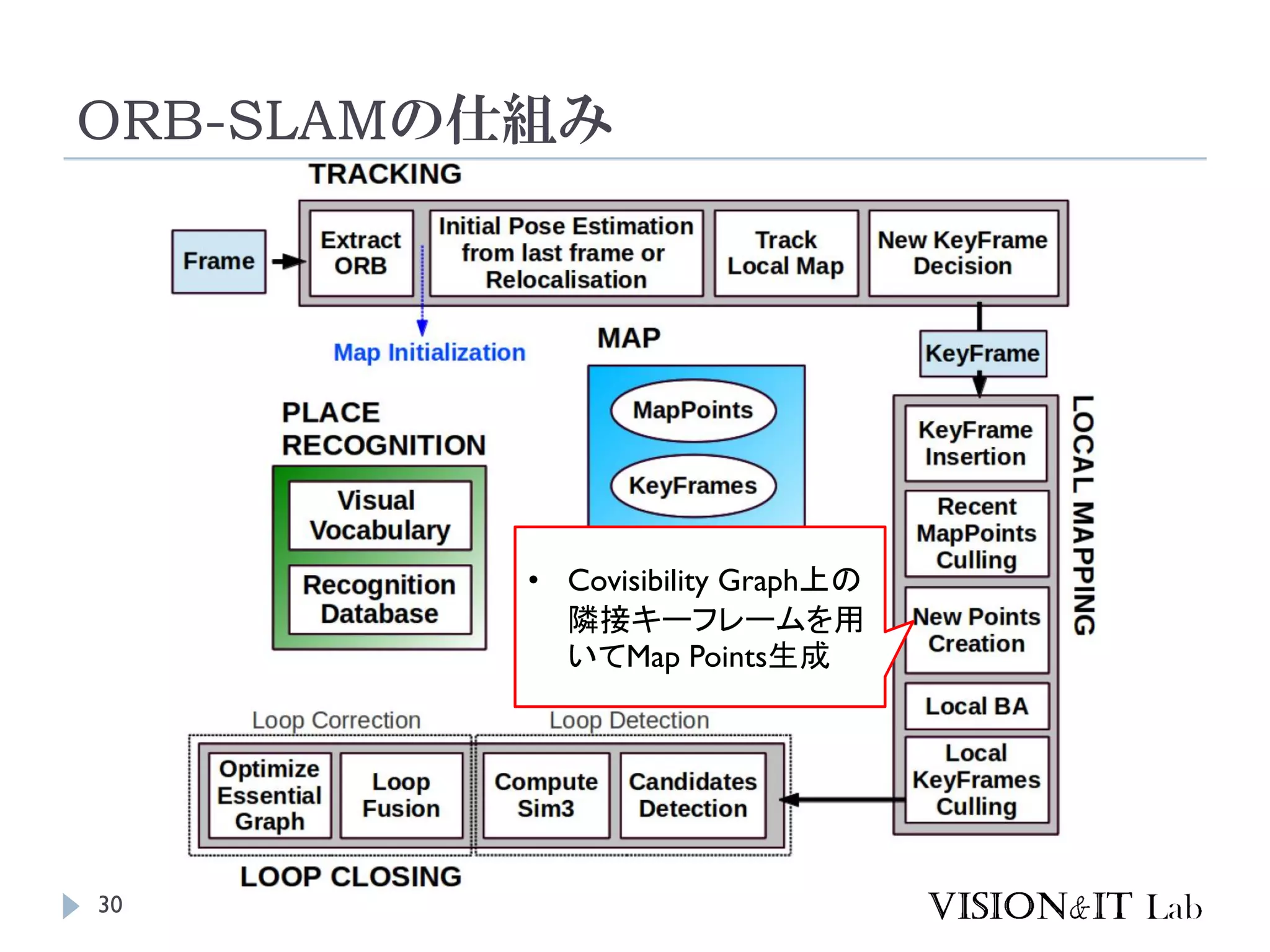
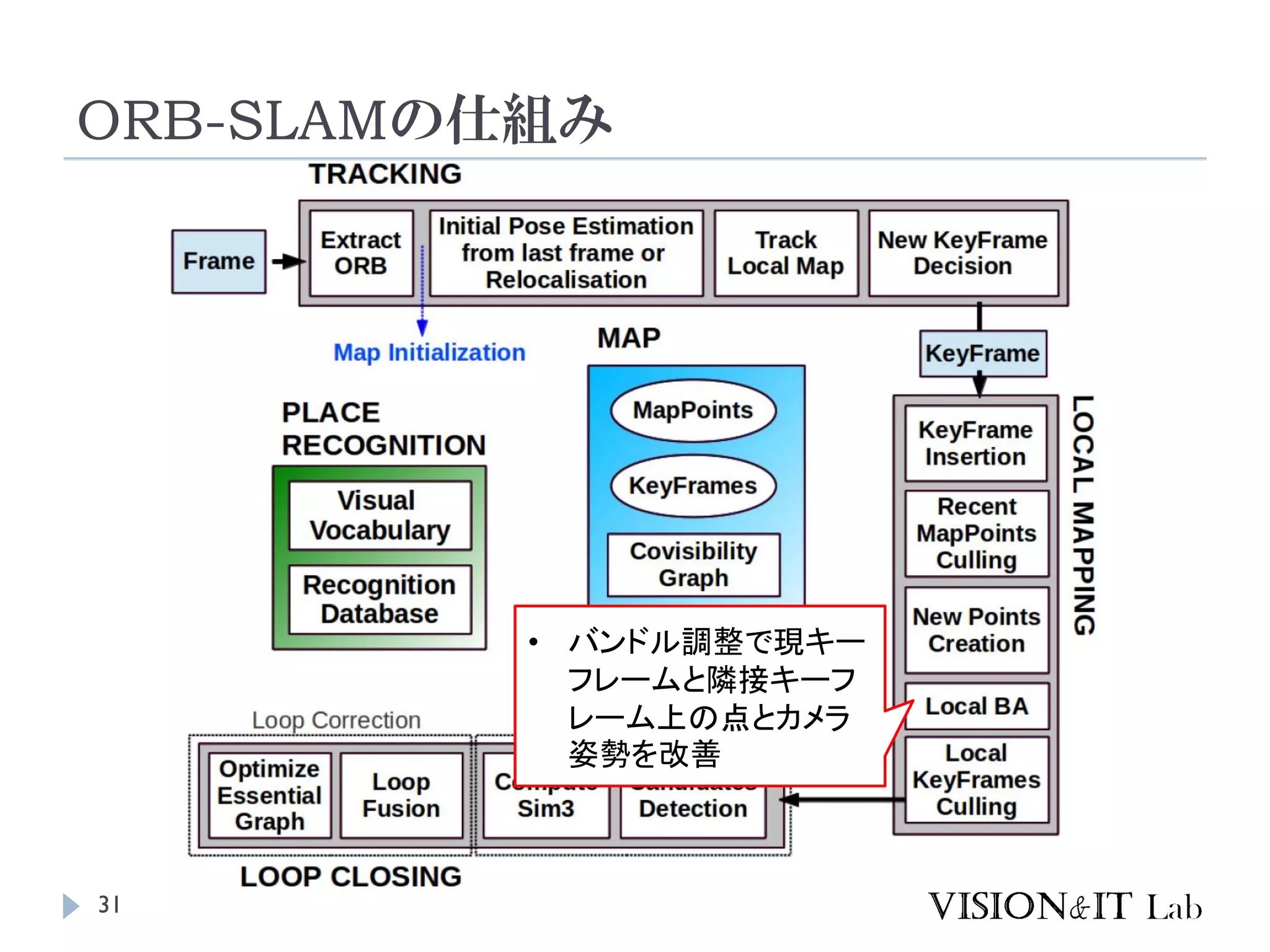
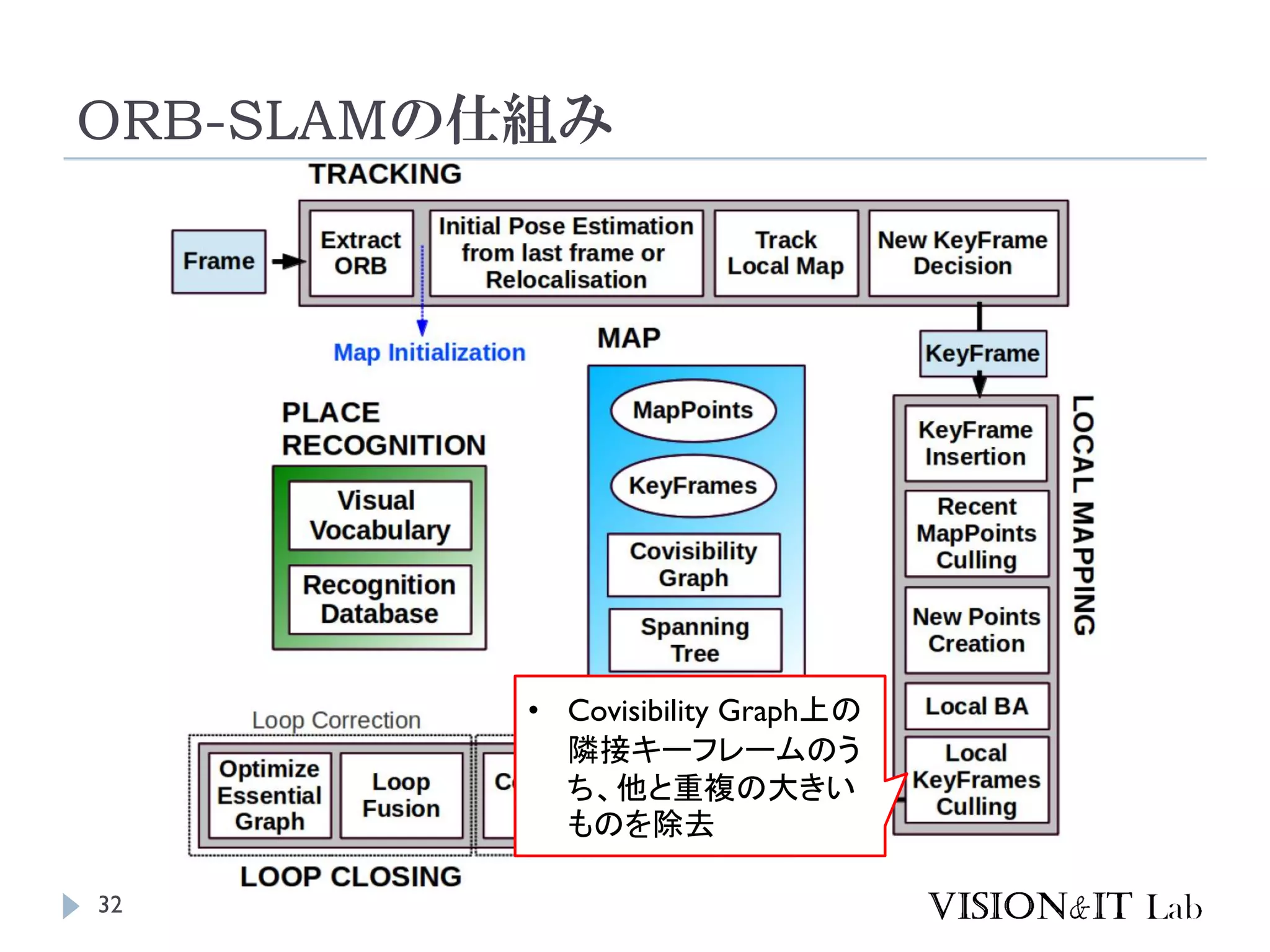
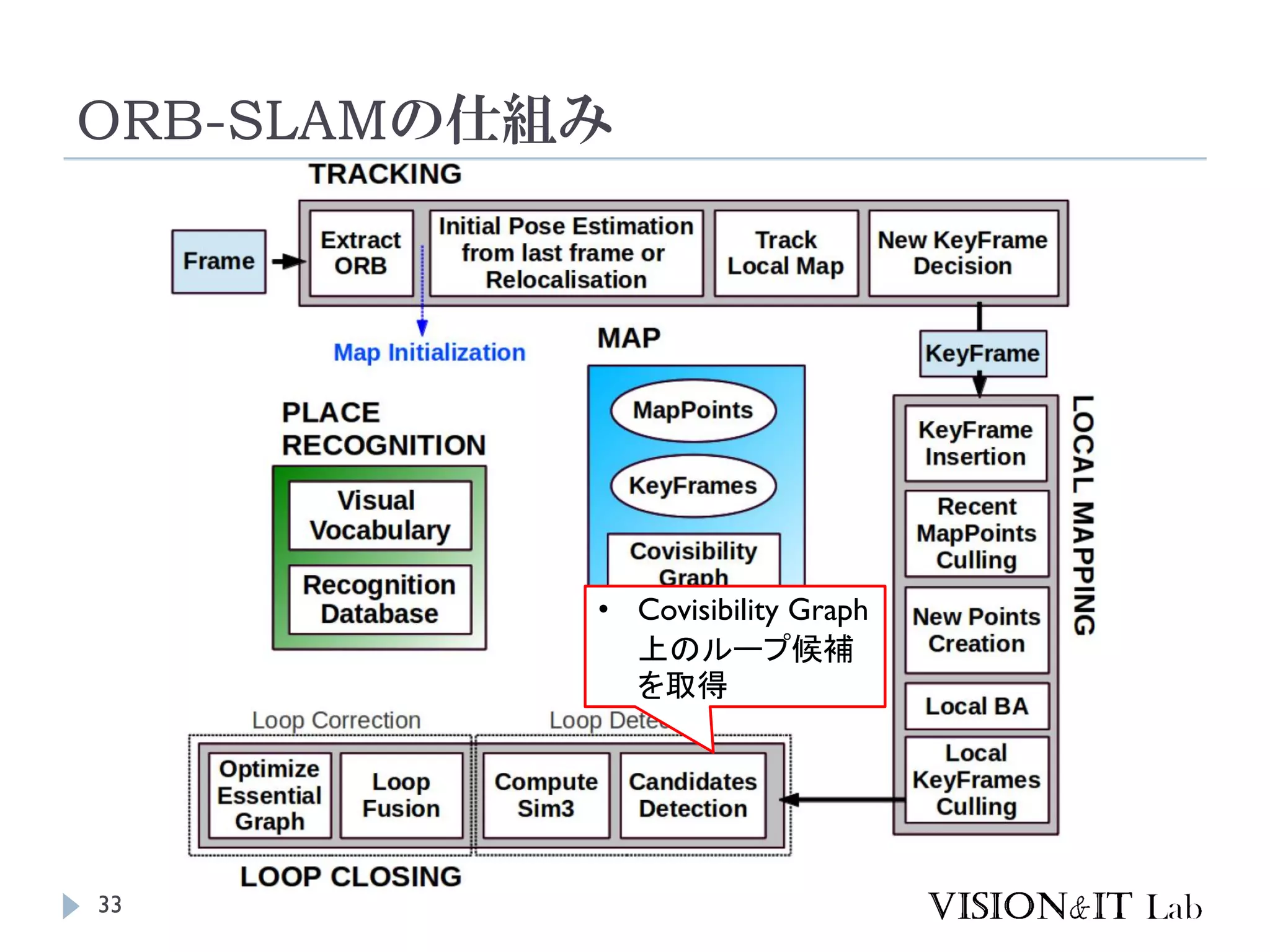
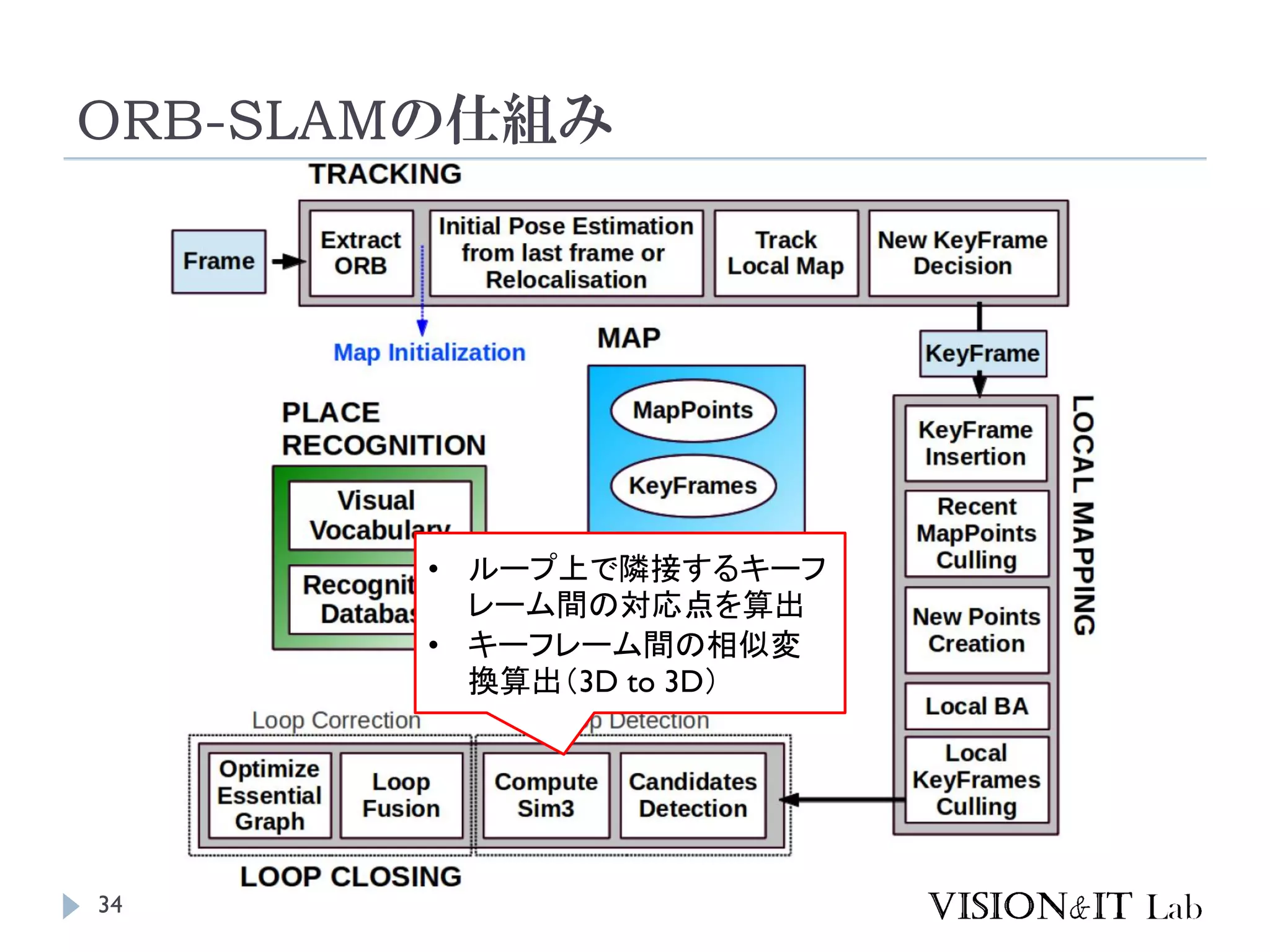
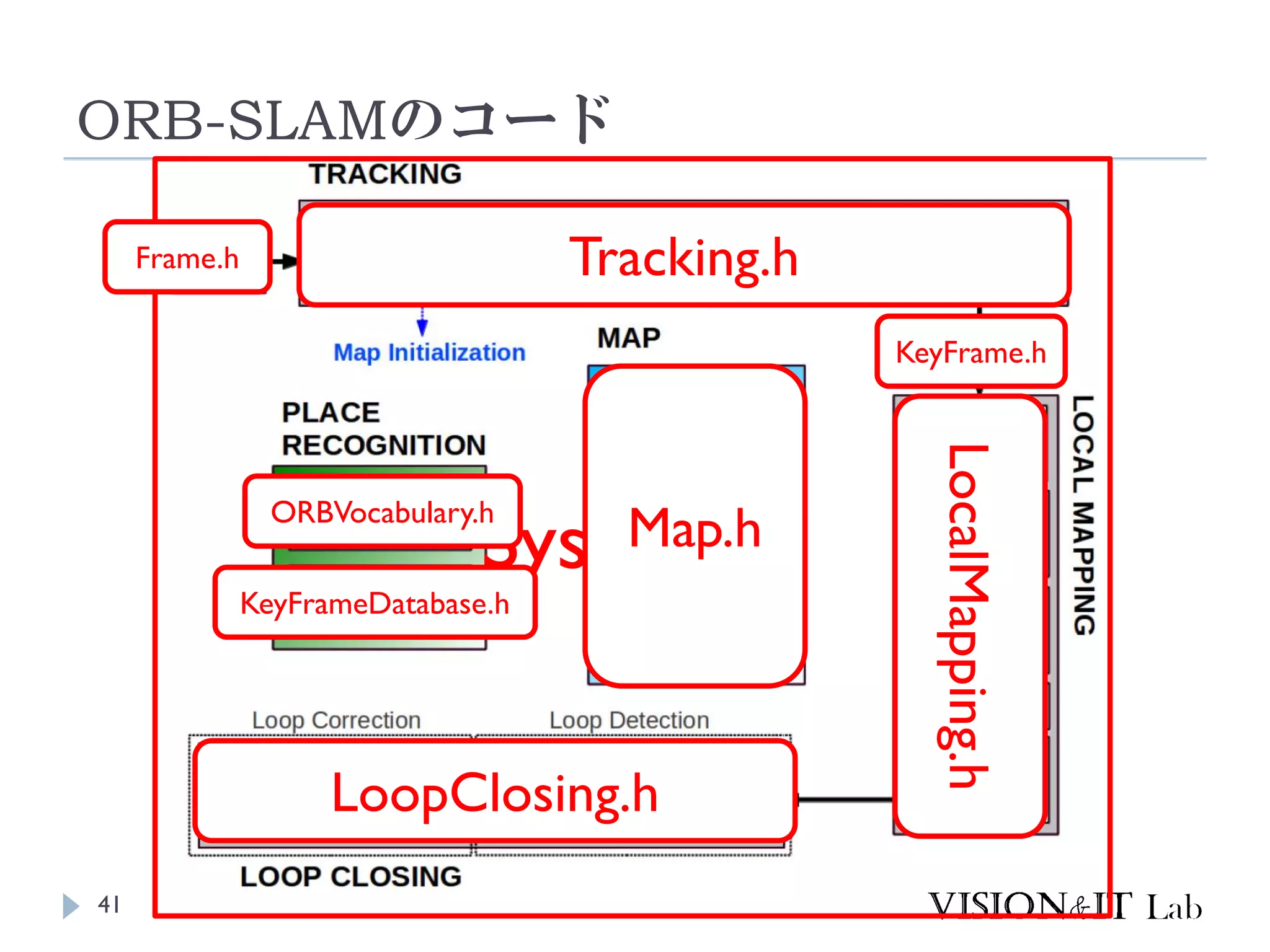
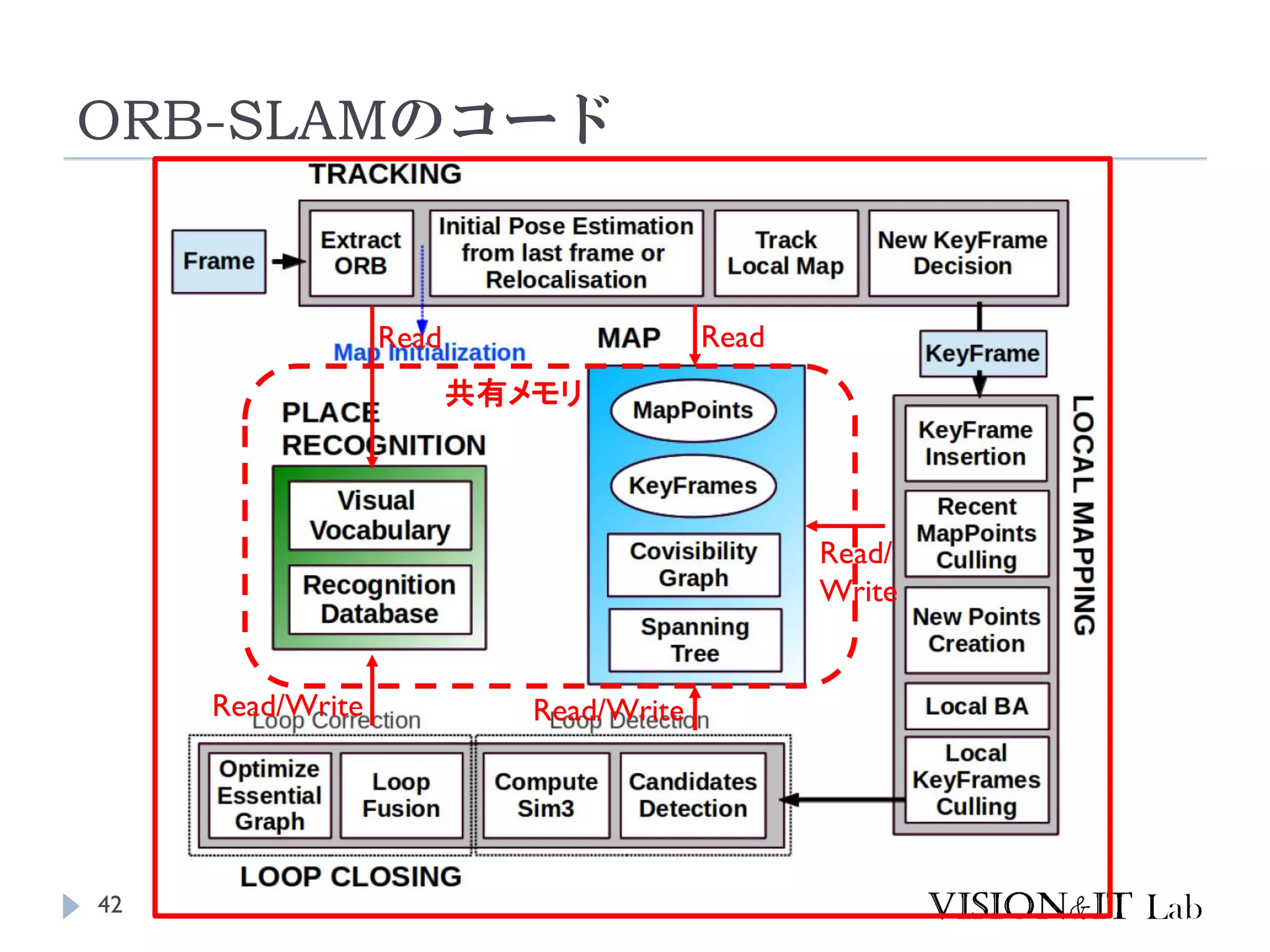
10. 11. 12. 13. 14. 15. ORB-SLAMの仕組み
15
Tracking、 Local Mapping、Loop Closingの3つのスレッド
が並列に動作
Tracking: 入力フレームのカメラ位置/姿勢を推定
Local Mapping: 地図(点群)を生成/更新
Loop Closing: カメラ位置/姿勢の誤差の蓄積を除去
全スレッドでORB特徴を利用
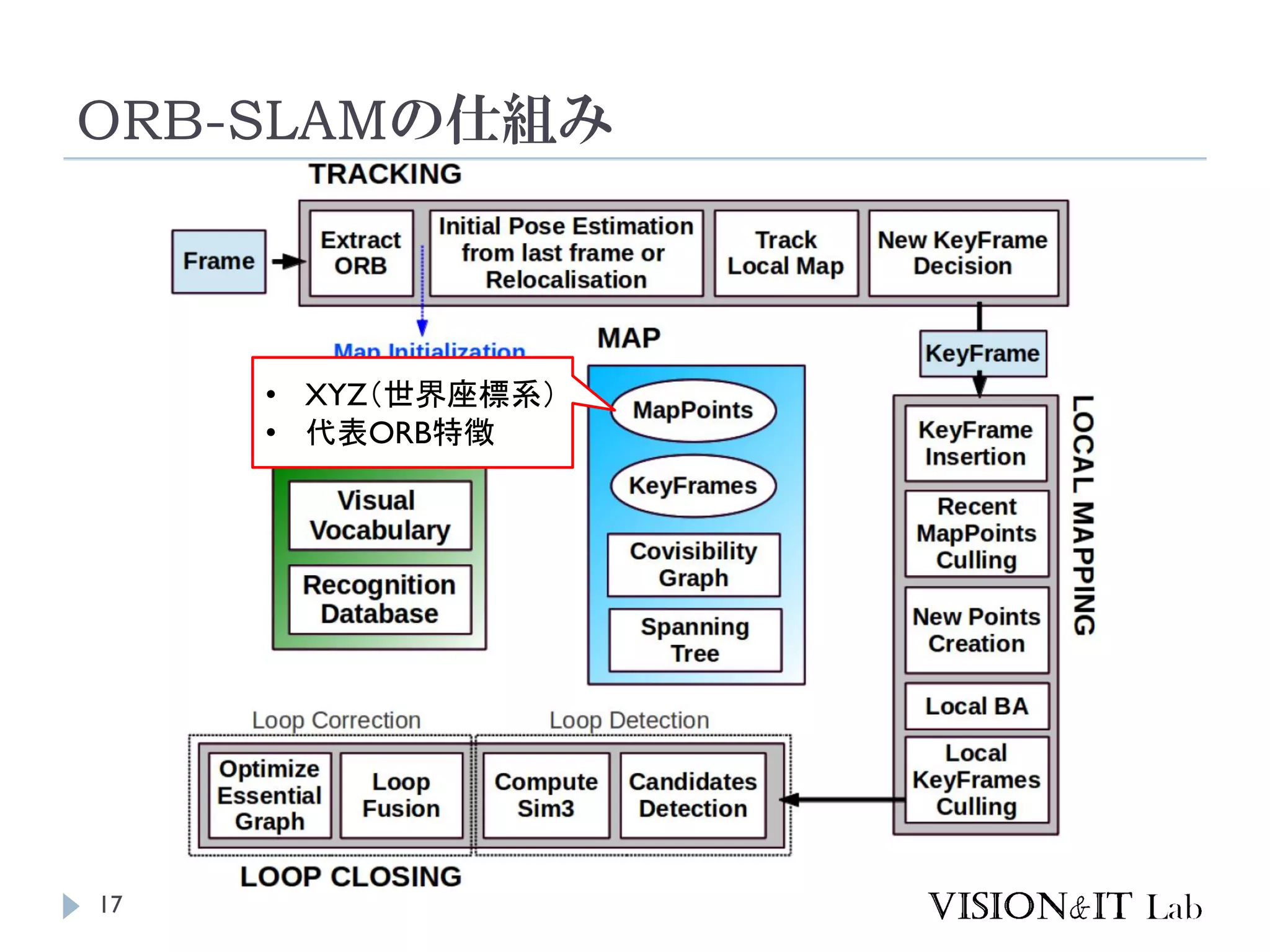
MAP
点(XYZ)とそれに紐づいた代表ORB特徴
各キーフレームの全ORB特徴を保持
Place Recognition:
ORBによるBags-of-Wordsでクエリー画像に近いキーフレームを検索
追跡失敗時やMapping時に対応点が見つからない時、Loopを探す
時などに利用
16. 17. 18. 19. 20. 21. 22. 23. 24. 25. 26. 27. 28. 29. 30. 31. 32. 33. 34. 35. 36. 37. 38. ORB-SLAMの依存ライブラリ
38
Pangolin
ビジュアライゼーションに必要
https://github.com/stevenlovegrove/Pangolin
OpenCV (2.4.11と3.2でテスト)
画像の操作と特徴量の抽出
http://opencv.org
Eigen3
g2oを動かすのに必要
http://eigen.tuxfamily.org
DBoW2
Place Recognitionに使用。ORB-SLAM2に同梱
g2o
幾何学的な最適化に使用。ORB-SLAM2に同梱
ROS (Hydro or Newer)
リアルタイムで動かす時、カメラ出力をROSのトピックとして動かす必要
http://ros.org
39. 40. 41. 42. 43. ORB-SLAMコードの特徴
43
実装は論文通り
論文とコードの対応を見つけやすい
論文と実装が違うというケースも割とあるので
ほとんど全てのパラメータがメンバ変数になっており、関数の
引数として渡されることがないため、各関数がどのようなパラ
メータに依存してるかが非常にわかりにくい。
そのため、カスタマイズの影響範囲を見積もるのがツライ
マルチスレッドなので尚ツライ。。。
リアルタイム/マルチスレッドのため、デバッグがツライ。。。
例えばLocal Mappingがデバッグ処理で遅れたらTrackingも止まる
printfデバッグ
なんかよい方法あったら教えて下さい。
44. まとめ
44
単眼カメラによるSparseなVisual SLAM
Tracking、Mapping、Loop Closingを別スレッドで動かすこ
とでリアルタイムに動作
PTAMはTrackingとMappingのみ
処理が高速でロバストな特徴量であるORBをTracking、
Mapping、Loop Closingで共通して使用
Place Recognitionにも活用
論文と照らし合わせながらソースコードを読んだ方が理
解が早い。
マルチスレッドで処理が複雑、かつクラス同士が複雑に絡み
合っており、カスタマイズは非常にツライ。。。


























![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)












![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]YOLOv4: Optimal Speed and Accuracy of Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/200515dlseminar-200515082345-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Real-Time Semantic Stereo Matching](https://cdn.slidesharecdn.com/ss_thumbnails/real-timesemanticstereomatching-sugisakihiroaki-191213003224-thumbnail.jpg?width=640&height=640&fit=bounds)



















![[DL輪読会]Differentiable Mapping Networks: Learning Structured Map Representatio...](https://cdn.slidesharecdn.com/ss_thumbnails/differentiablemappingnetworks-200707033539-thumbnail.jpg?width=640&height=640&fit=bounds)


























