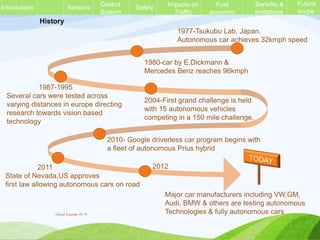
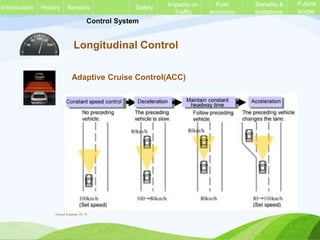
The document discusses autonomous vehicles and their components. It describes the history of autonomous vehicles from early prototypes in the 1980s to ongoing testing and development by major automakers. It then covers the various sensors used in autonomous vehicles like LIDAR, radar, cameras, GPS, and IMU. It also discusses the control systems for lateral and longitudinal control. Additional sections cover safety benefits, impacts on traffic, fuel economy advantages and limitations, and the future scope of automated transportation.













![References
[1]. Qayum M.A, Siddique N.A, Haque M.A, Tayeen A.S.M. “ Control of autonomous cars for
intelligent transportation system”. International Conference on Digital Object Identifier:
10.1109/ICIEV.2012.6317339 Publication Year: 2012 , Page(s): 377 – 382 .
[2]. Althoff Matthias ,Stursberg Olaf , Buss Martin. “ Safety Assessment of Autonomous
Cars using Verification Techniques”. American Control Conference, 2007. ACC '07 Digital
Object Identifier: 10.1109/ACC.2007.4282809 Publication Year: 2007 , Page(s): 4154 – 4159
[3]. Holzapfel Wolfgang , Sofsky M , Neuschaefer-Rube U. “Road profile recognition for
autonomous car navigation and Navstar GPS support” Aerospace and Electronic Systems, IEEE
Transactions on Volume: 39 , Issue: 1 Digital Object Identifier: 10.1109/TAES.2003.1188890
Publication Year: 2003 , Page(s): 2 – 12.
[4]. Arogeti, Shai A. , Berman, Nadav . “ Path Following of Autonomous Vehicles in the
Presence of Sliding Effects”. Vehicular Technology, IEEE Transactions
Volume: 61 , Issue: 4 . Publication Year: 2012 , Page(s): 1481 - 1492
Vinod Kumar M. P.](https://image.slidesharecdn.com/c26ca34a-4718-4a5c-af81-7e357f6ae9fb-160901164511/85/Vinod_Autonomous_car_ppts-30-320.jpg)






![Autonomous vehicles[1]](https://cdn.slidesharecdn.com/ss_thumbnails/autonomousvehicles1-101119105539-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



















































