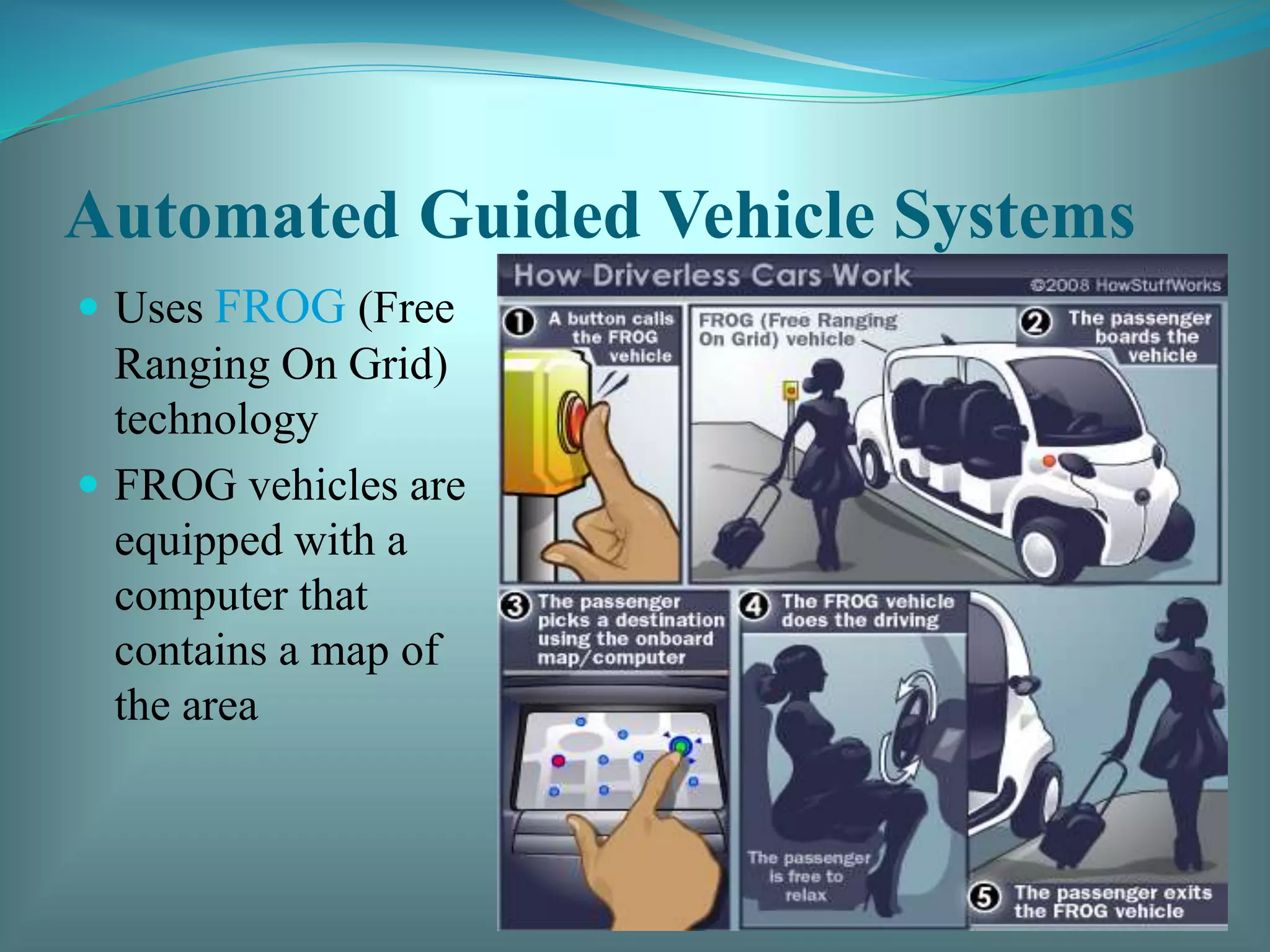
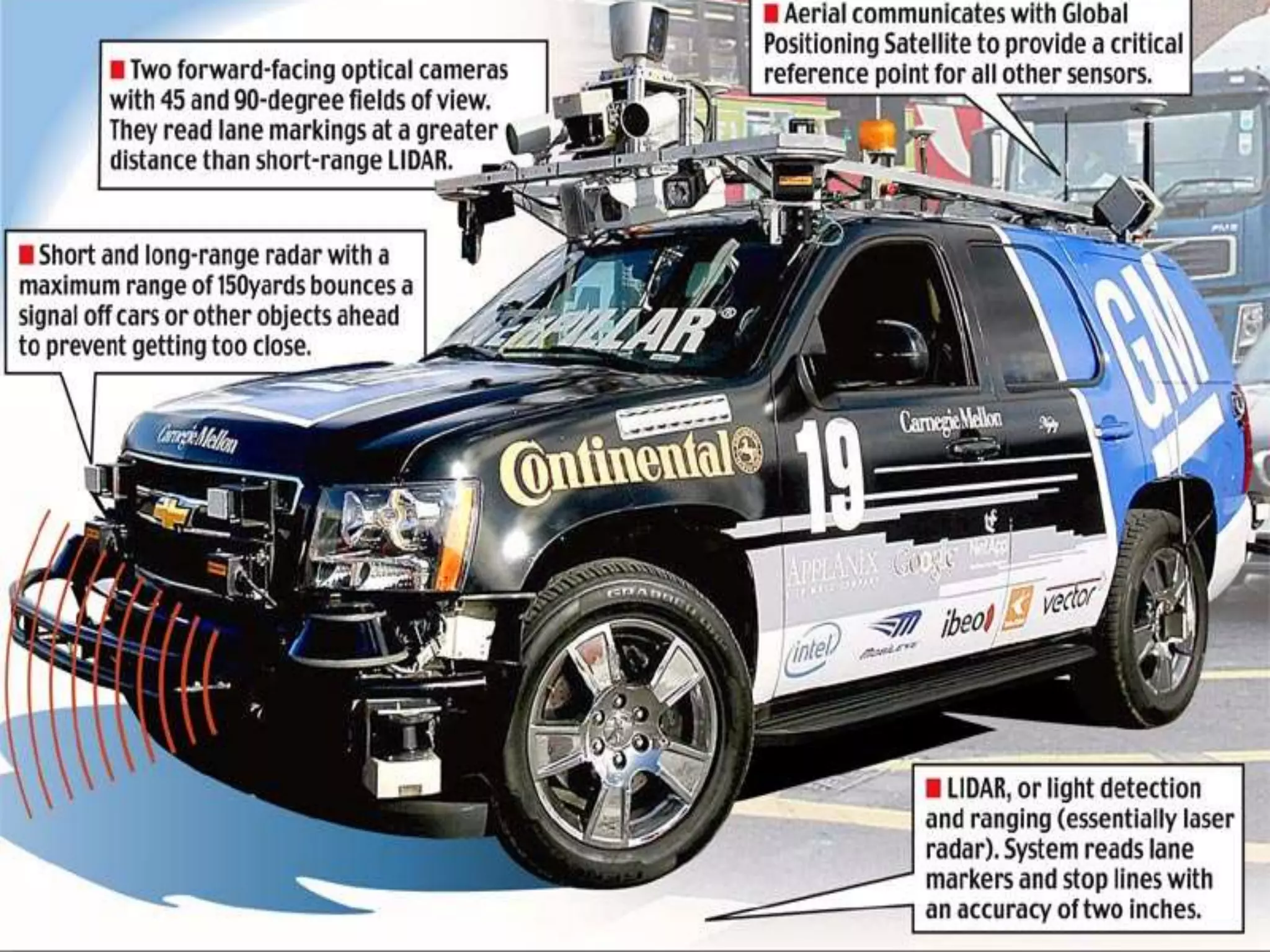
The document discusses autonomous vehicles and their components. It provides an overview of the history and development of autonomous vehicles. It describes the various sensors like GPS, lidar, and radar that autonomous vehicles use to navigate environments and detect objects. It explains how autonomous vehicles work through components like sensors, navigation, motion planning and actuation. It discusses advantages like increased road capacity and safety, as well as potential disadvantages like security issues if the vehicle is hacked.








































![Autonomous vehicles[1]](https://cdn.slidesharecdn.com/ss_thumbnails/autonomousvehicles1-101119110121-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)










































