Download to read offline


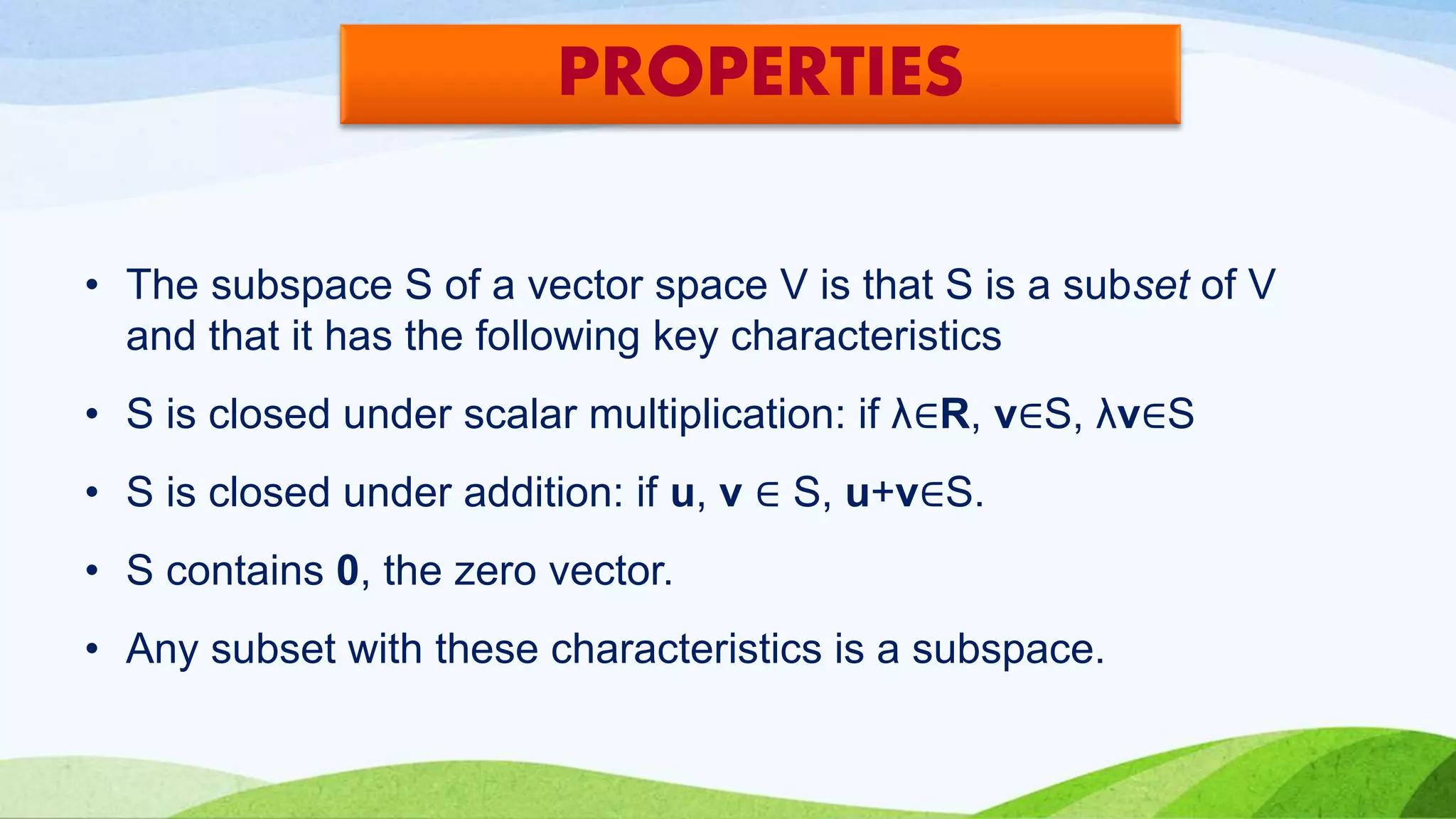

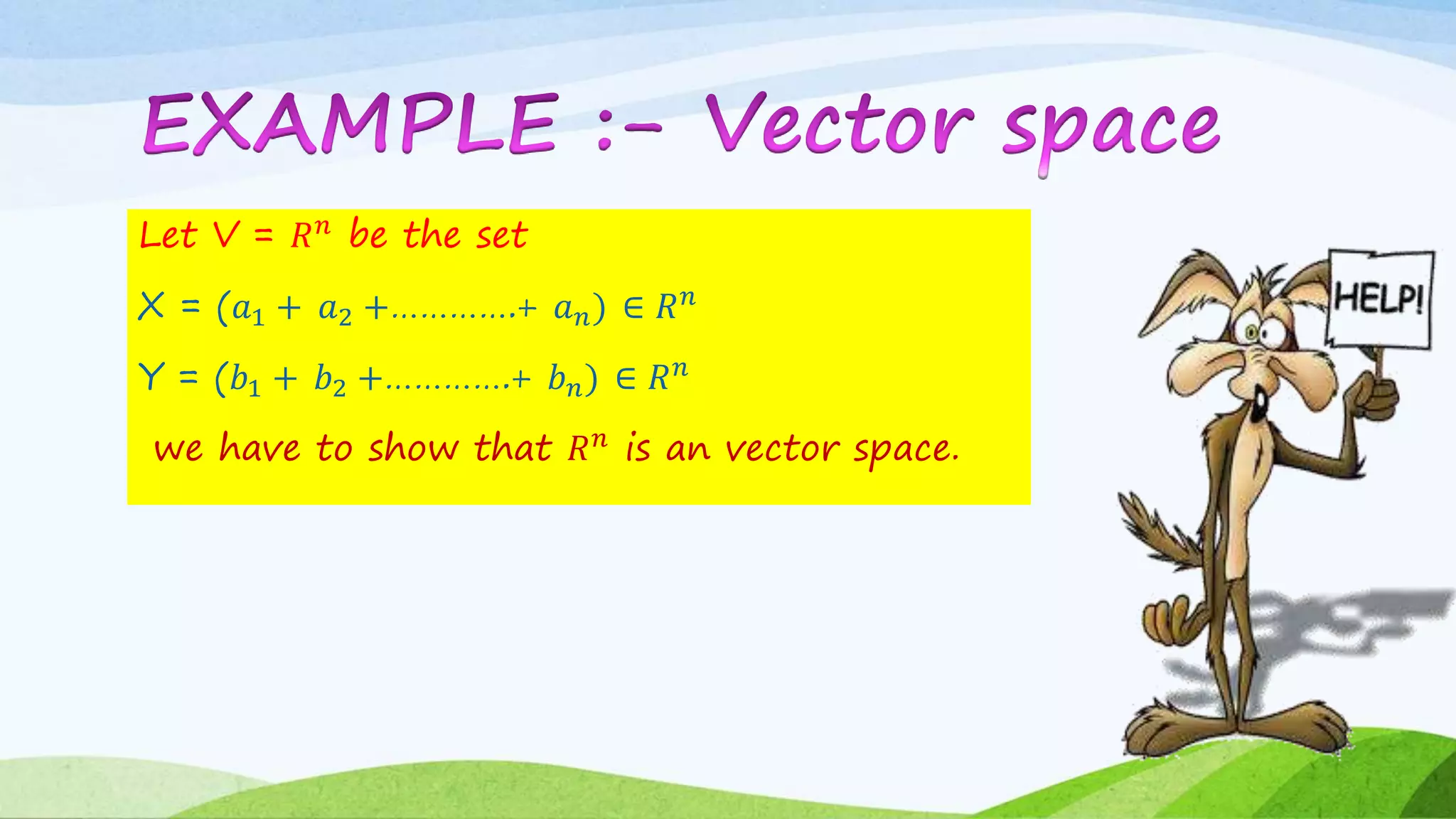
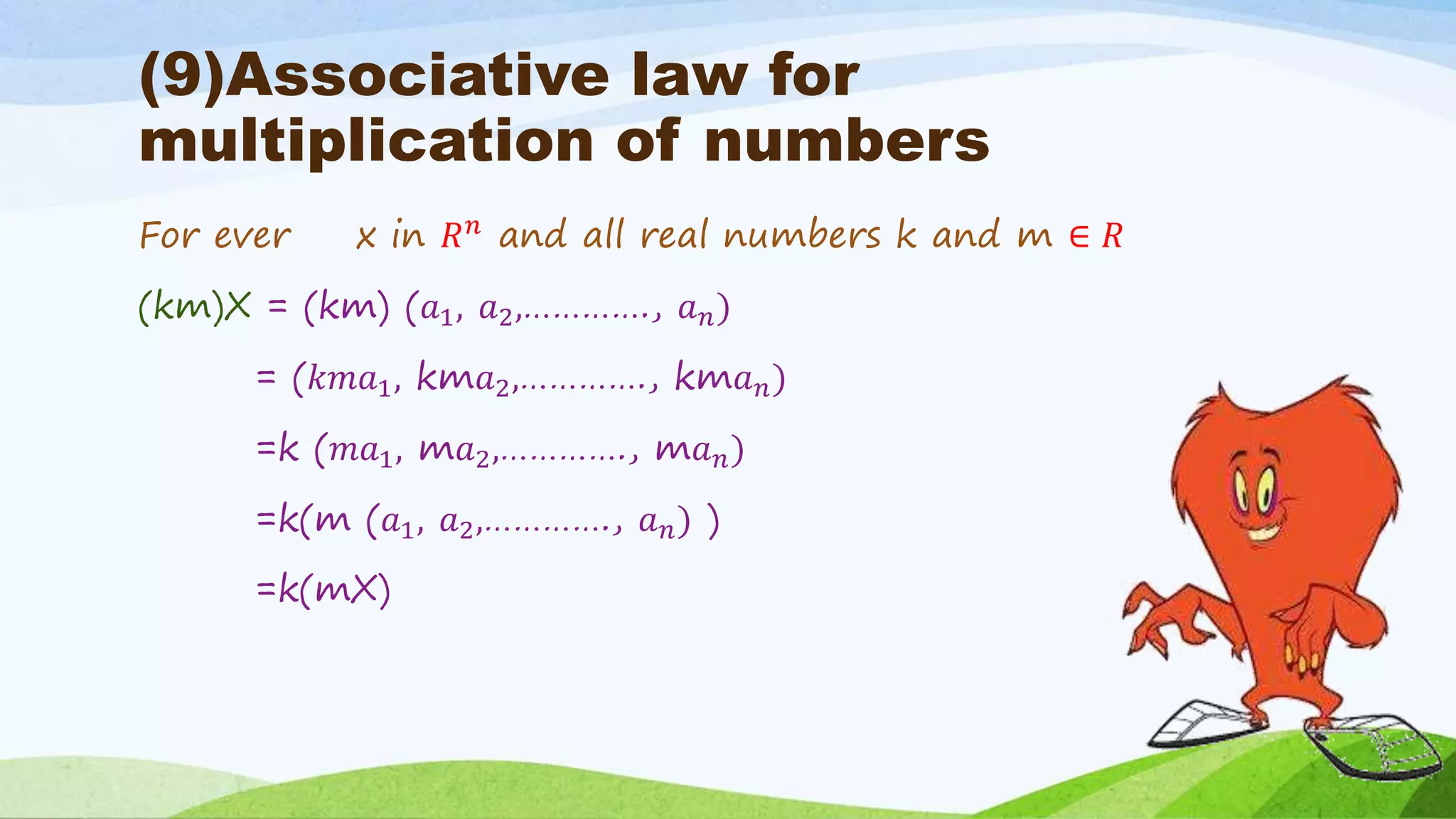
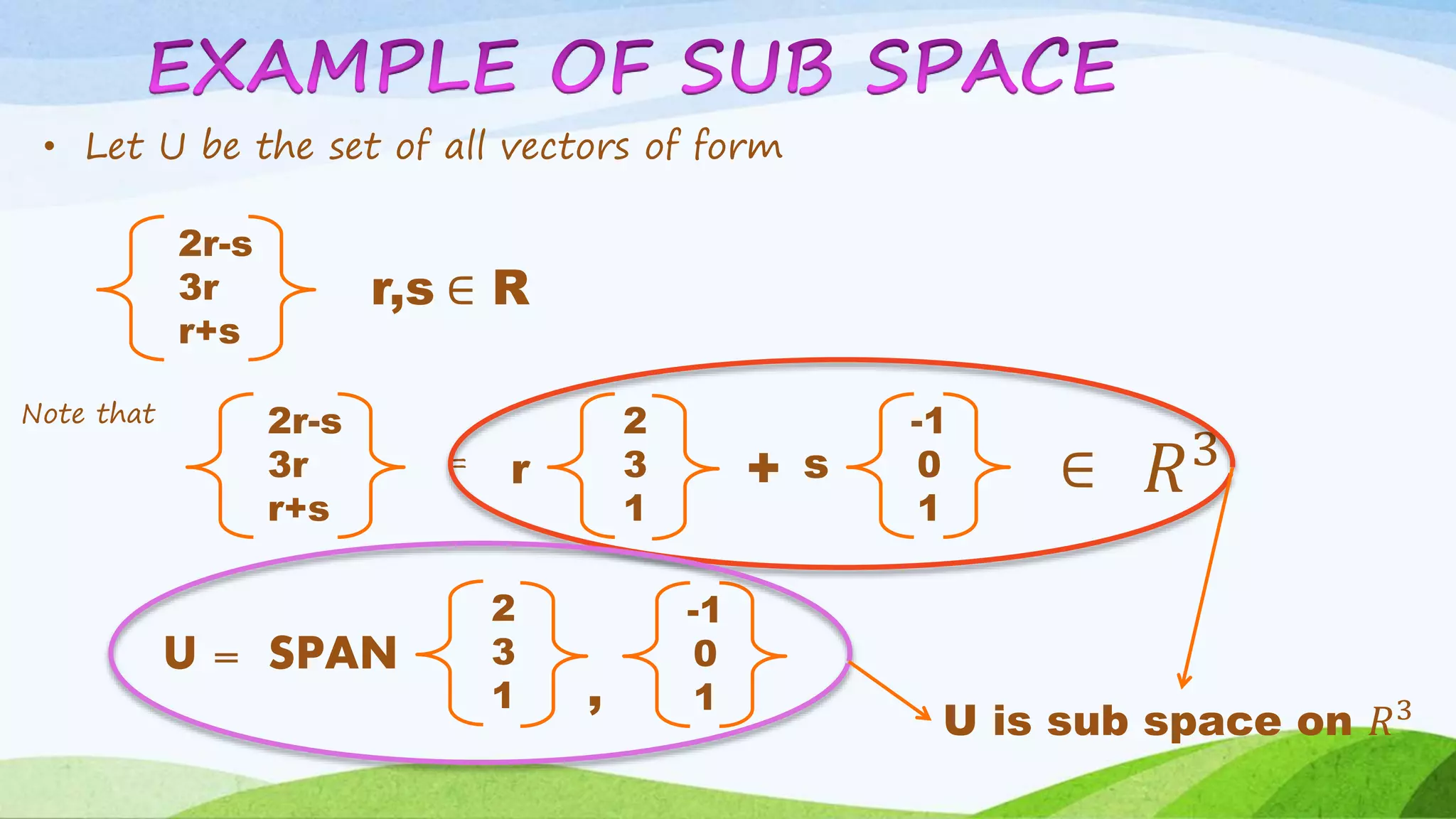




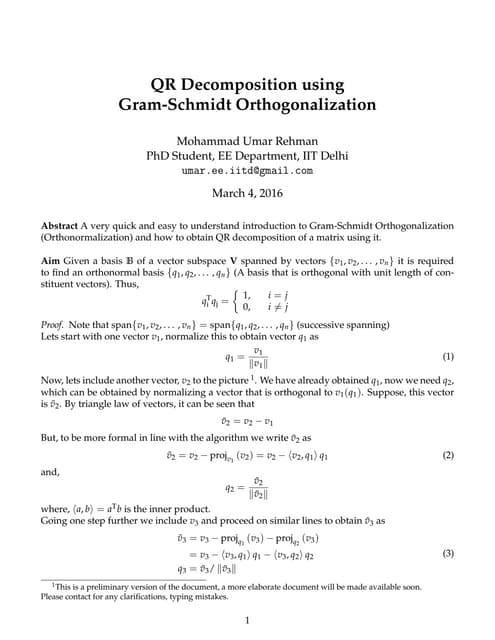
The document explains the concept of vector spaces and subspaces, detailing axioms related to vector addition and scalar multiplication. It outlines the criteria for a subset to be considered a subspace, such as closure under addition and scalar multiplication and the existence of a zero vector. Additionally, it provides examples and properties that validate these concepts in the context of real number spaces.