Download to read offline



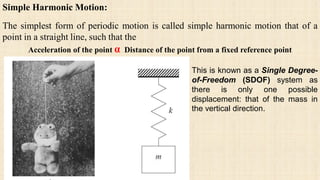


























1. The document discusses the theory of vibrations as it relates to equipment foundation design. It covers topics such as simple harmonic motion, free and forced vibrations, damping, and single degree of freedom systems. 2. Foundations may experience static or dynamic loads from various sources like earthquakes, blasting, wind, and machinery which can cause the foundation and soil to vibrate. 3. Simple harmonic motion is the simplest form of periodic motion where the acceleration of a point is directly proportional to its displacement from a fixed reference point.























































![Unit-2 [Dynamic Equipment Foundation].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/unit-2dynamicequipmentfoundation-231010072957-6de83d97-thumbnail.jpg?width=640&height=640&fit=bounds)




















