2
What is Vibration?
Vibrationis the motion of a particle or body which oscillates about a
position of equilibrium. Most vibrations in machines and structures are
undesirable due to increased stresses and energy losses.
Vibration in Everyday Life
3.
• Vibration isa mechanical
phenomenon whereby oscillations
occur about an equilibrium point.
•The oscillations may be periodic such as
the motion of a pendulum or random
such as the movement of a tire on a
gravel road.
•Vibration is undesirable, wasting
energy and creating unwanted sound –
noise.
Mechanical Vibrations
• FREE VIBRATIONoccurs when a mechanical
system is set off with an initial input and then
allowed to vibrate freely.
• FORCED VIBRATION is when a time-varying
disturbance (load, displacement or velocity) is
applied to a mechanical system. The
disturbance can be a periodic, steady-state
input, a transient input, or a random input.
Types of Vibrations
6.
Free Vibration
If theexternal forces is removed after giving an
initially displacement to the system, then the
system vibrates on its own due to internal elastic
forces. Such as that type vibration know as free
vibration.
Examples of free vibrations is oscillations of a
pendulum about a vertical equilibrium position.
The frequency of free vibration is known as free or
natural frequency (f n) in Hz.
7.
Forced Vibration
If systemor a body is subjected to a periodic
external force, then the resulting vibration are
known as forced vibration.
When an external force is acting, the body does
not vibrate with its own natural frequency,
but vibrates with the frequency of the applied
external force.
Examples of forced vibrations are, vibrations of
I.C. Engines, electric motor, centrifugal pump.
8.
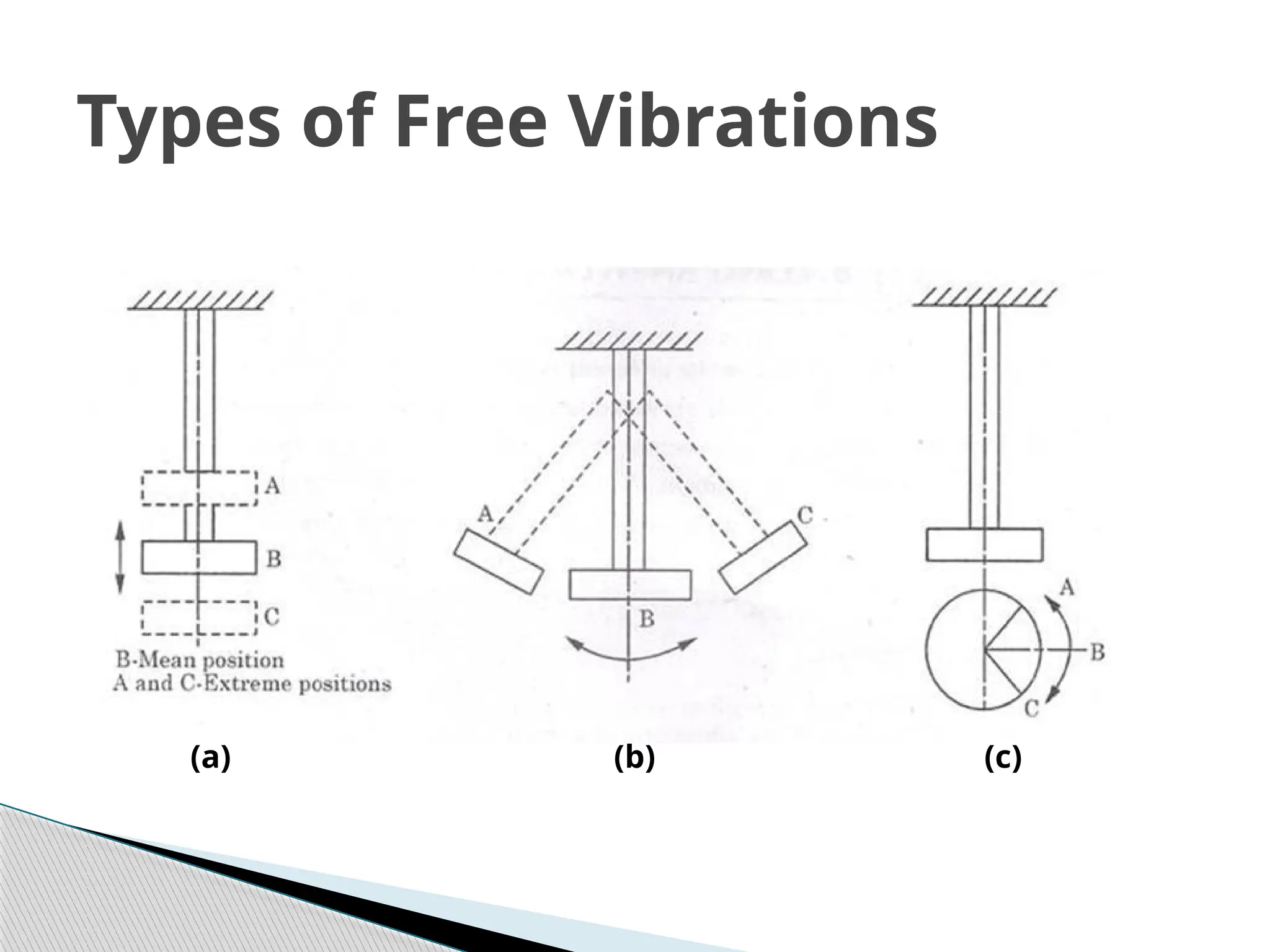
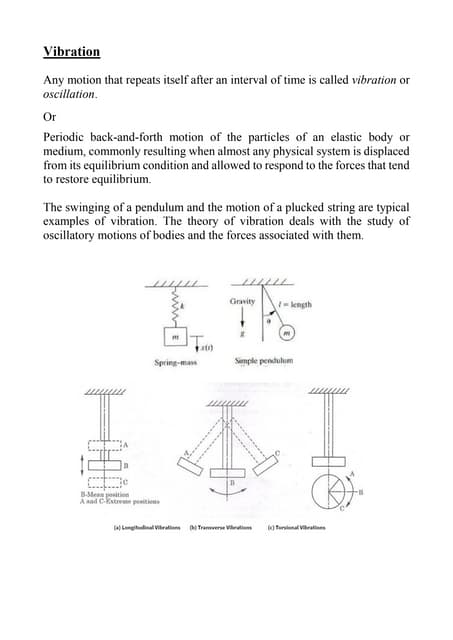
Longitudinal vibrations: When the particles of a bar or disc move parallel
to the axis of the shaft, then the vibrations are known as longitudinal
vibrations as shown in fig. (a). The bar is elongated and shortened
alternately and thus the tensile and compressive stresses are inducted in
the bar. The motion of spring mass system is longitudinal vibrations.
Transverse Vibrations : When the particles of the bar or disc move
approximately perpendicular to the axis of the bar, then the vibrations are
known as transverse vibrations as shown in fig.(b). In this case, bar is
straight and bent alternately. Bending stresses are induced in the bar.
Torsional Vibrations : When the particles of the bar or disc get alternately
twisted and untwisted on account of vibratory motion of suspended body, it
is said to be undergoing torsional vibrations as shown in fig. (c). In this
case, torsional shear stresses are induced in the bar
Types of Free Vibrations
Undamped vibration:
No dissipationof energy. In many cases,
damping is (negligibly) small (steel 1 –
1.5%). However small, damping has critical
importance when analysing systems at or near
resonance.
Damped vibration: Dissipation of energy occurs
- vibration amplitude decays
Undamped and damped vibration
11.
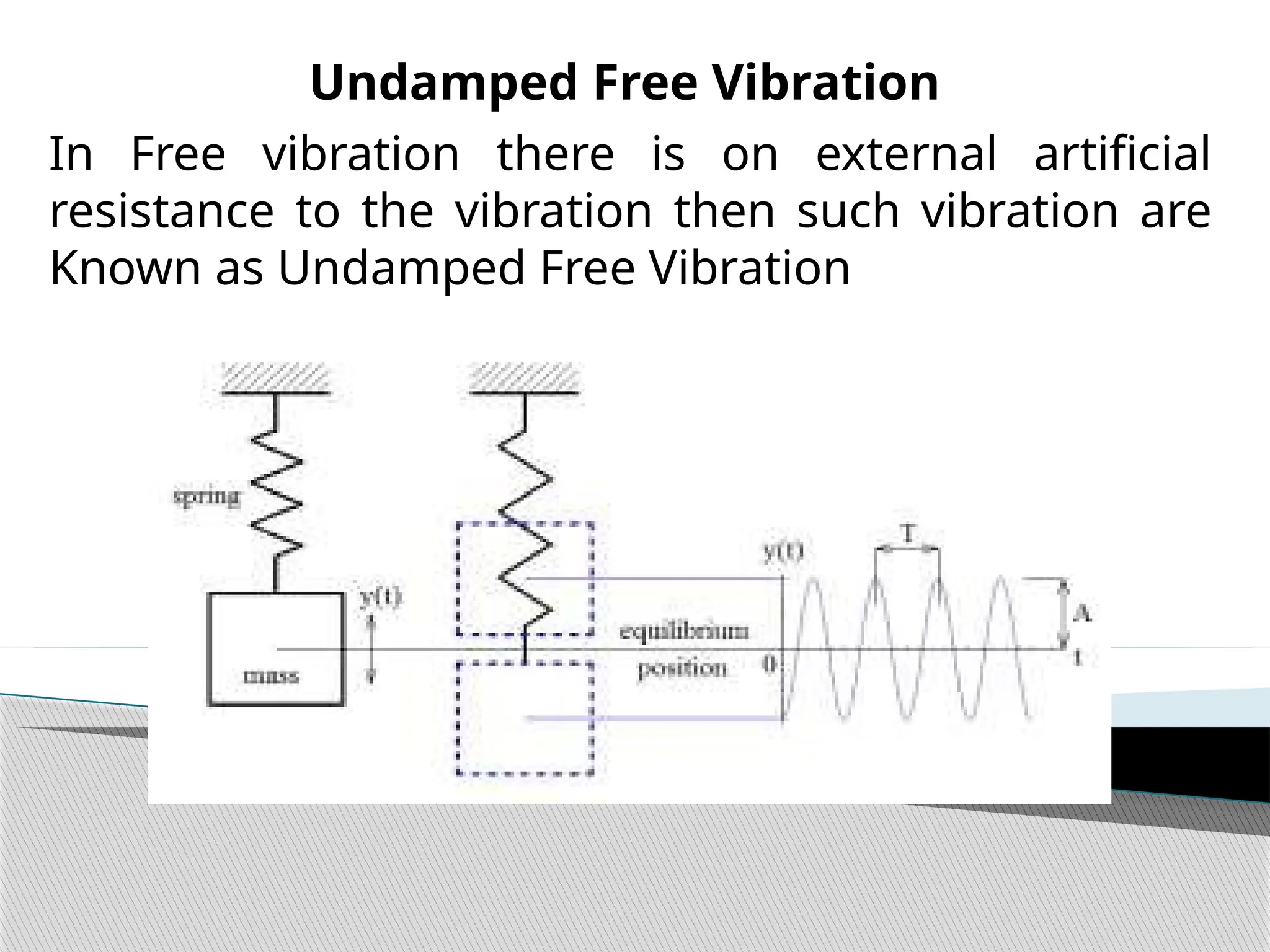
In Free vibrationthere is on external artificial
resistance to the vibration then such vibration are
Known as Undamped Free Vibration
Undamped Free Vibration
12.
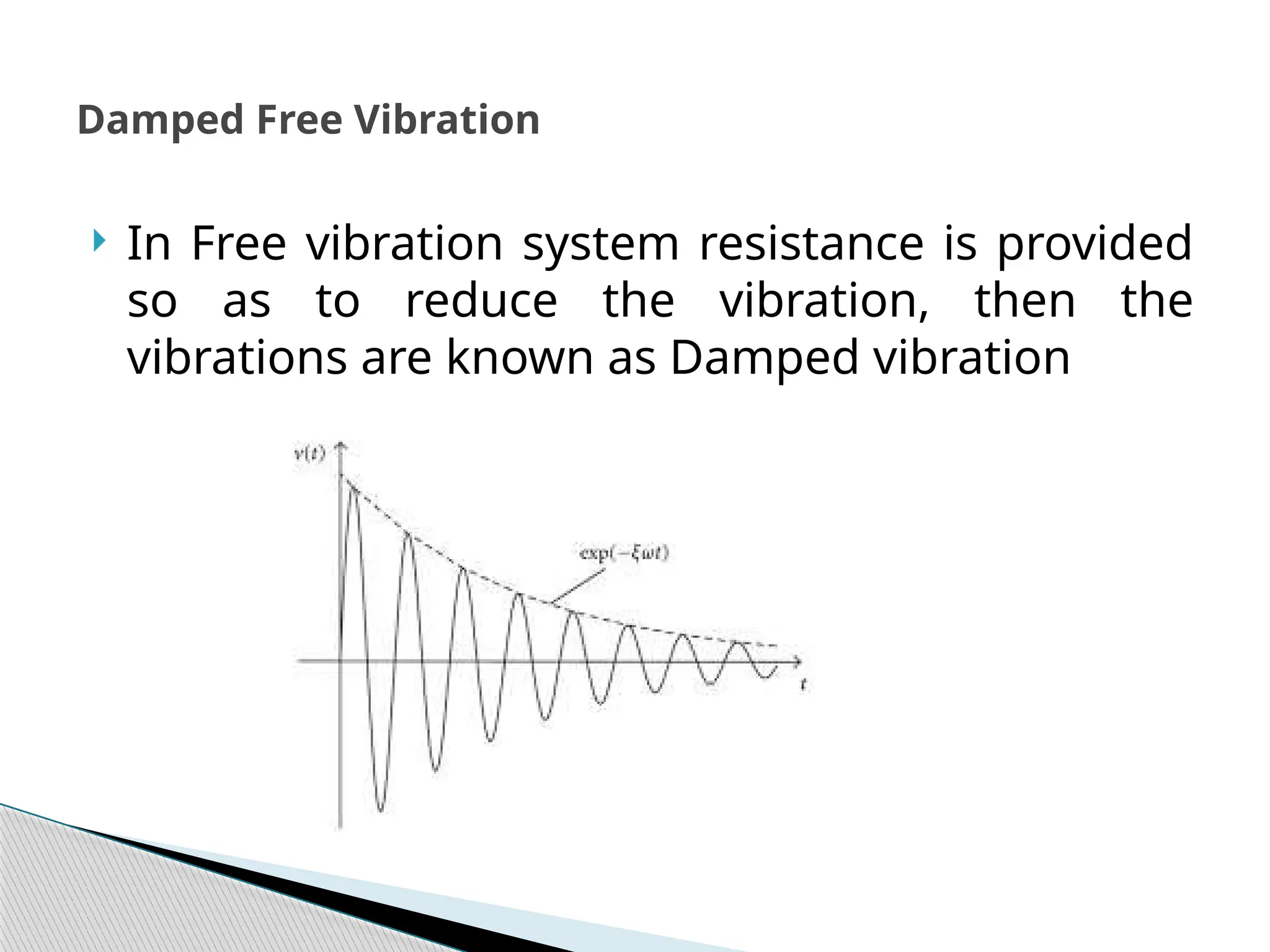
In Freevibration system resistance is provided
so as to reduce the vibration, then the
vibrations are known as Damped vibration
Damped Free Vibration
13.
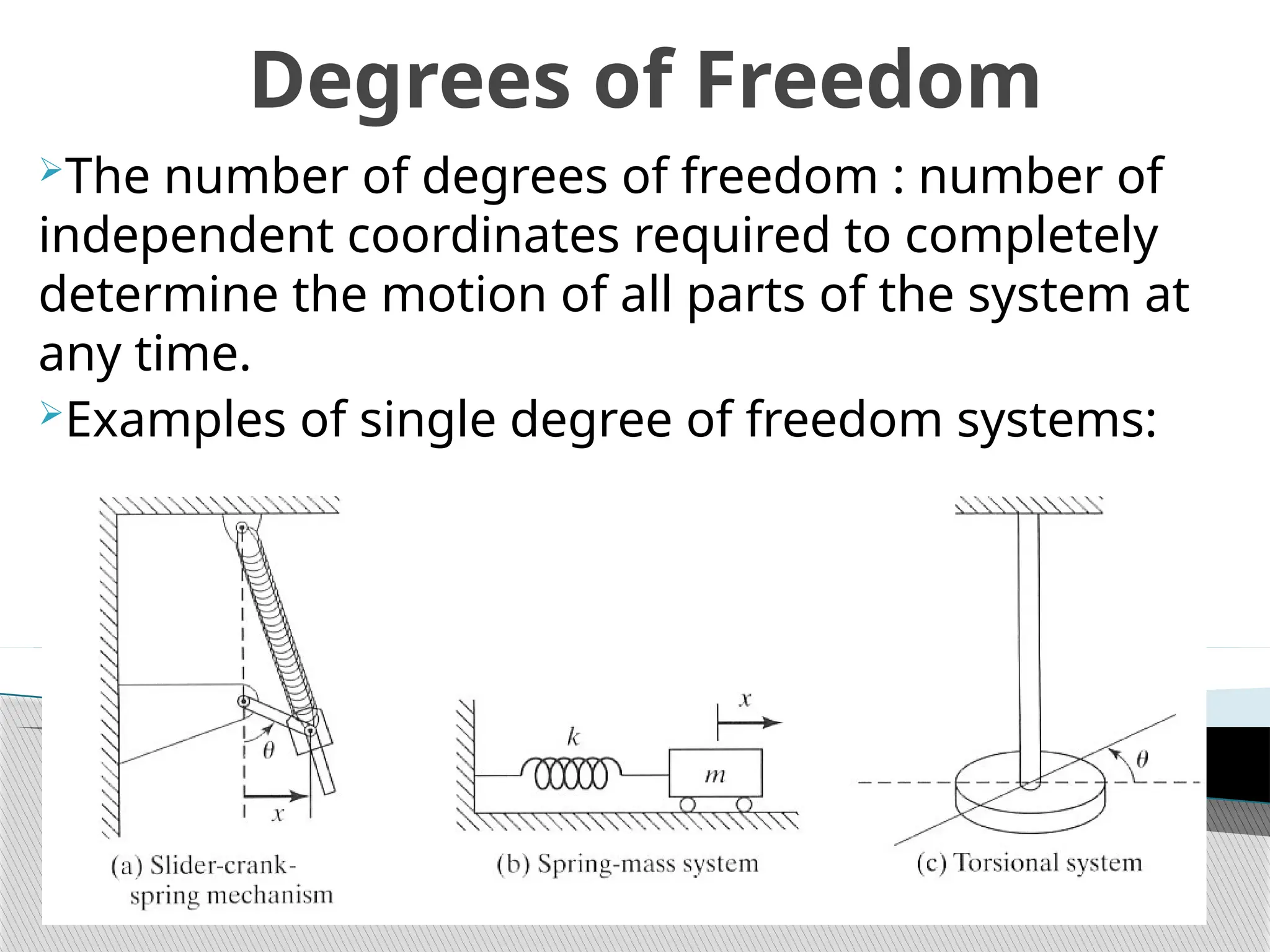
Degrees of Freedom
Thenumber of degrees of freedom : number of
independent coordinates required to completely
determine the motion of all parts of the system at
any time.
Examples of single degree of freedom systems:
14.
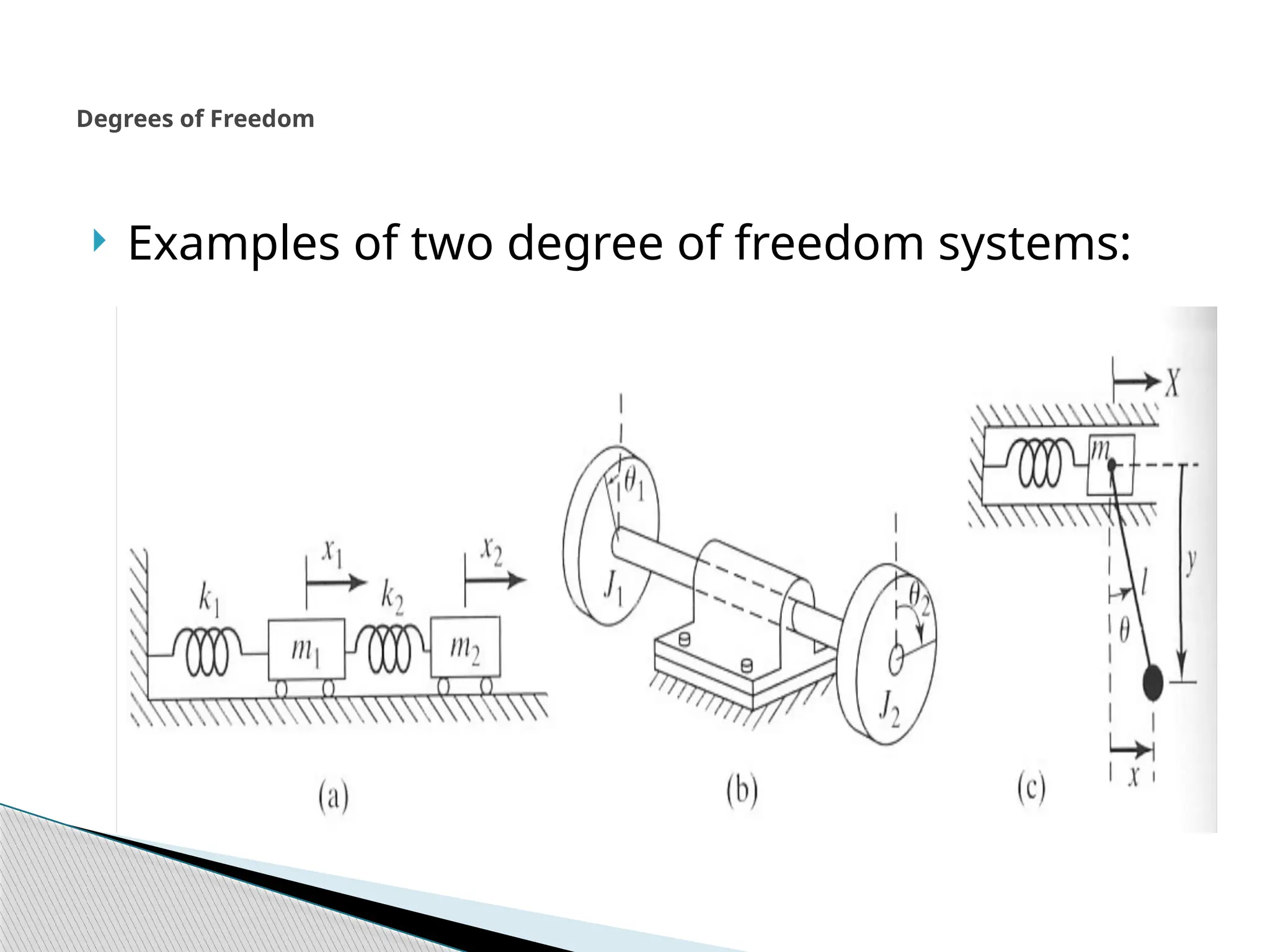
Examples oftwo degree of freedom systems:
Degrees of Freedom
15.
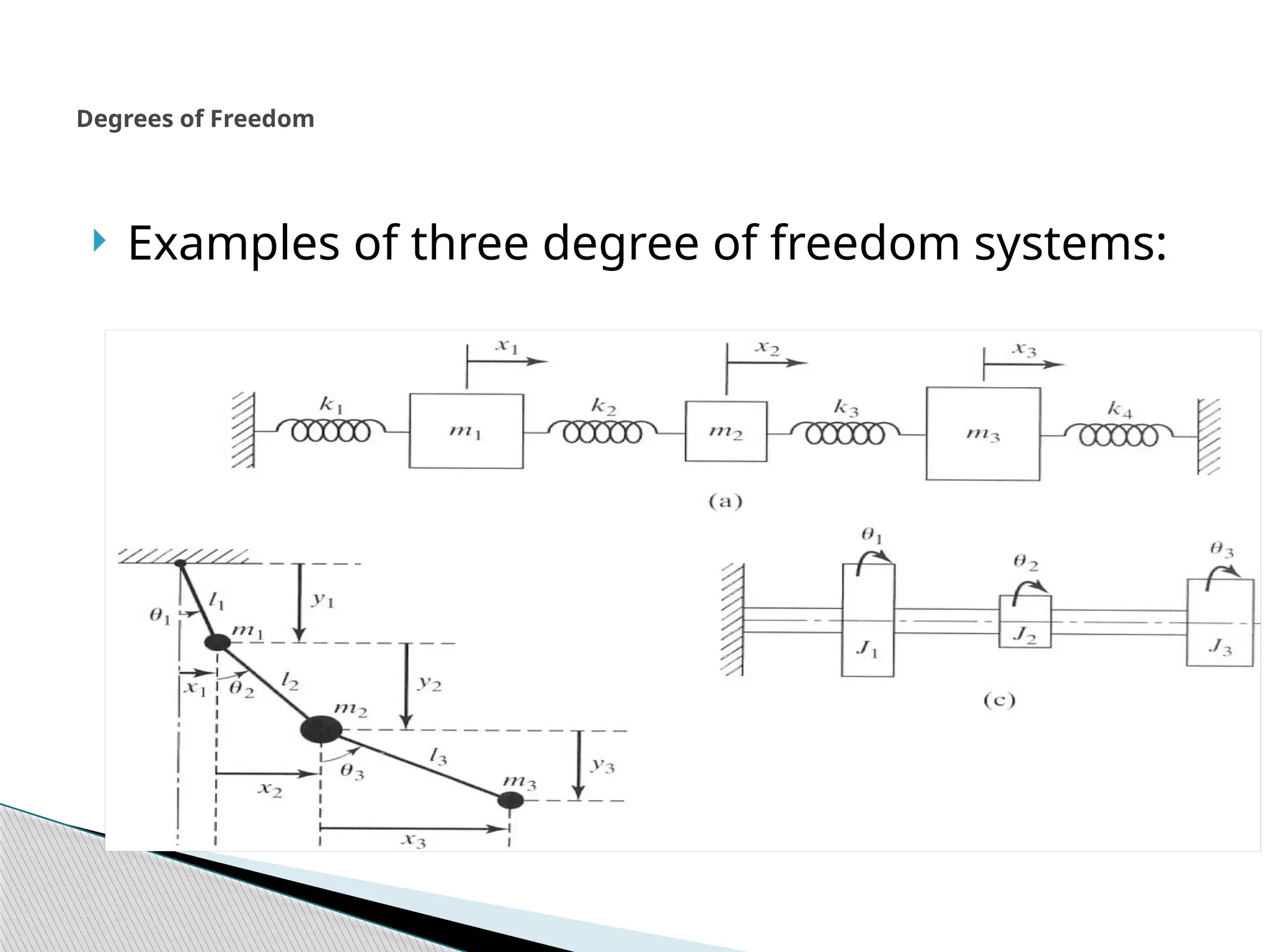
Examples ofthree degree of freedom systems:
Degrees of Freedom
16.
16
t
X
x n
sin
n
n
2
period
2
1 n
n
n
f natural frequency
Amplitude
X
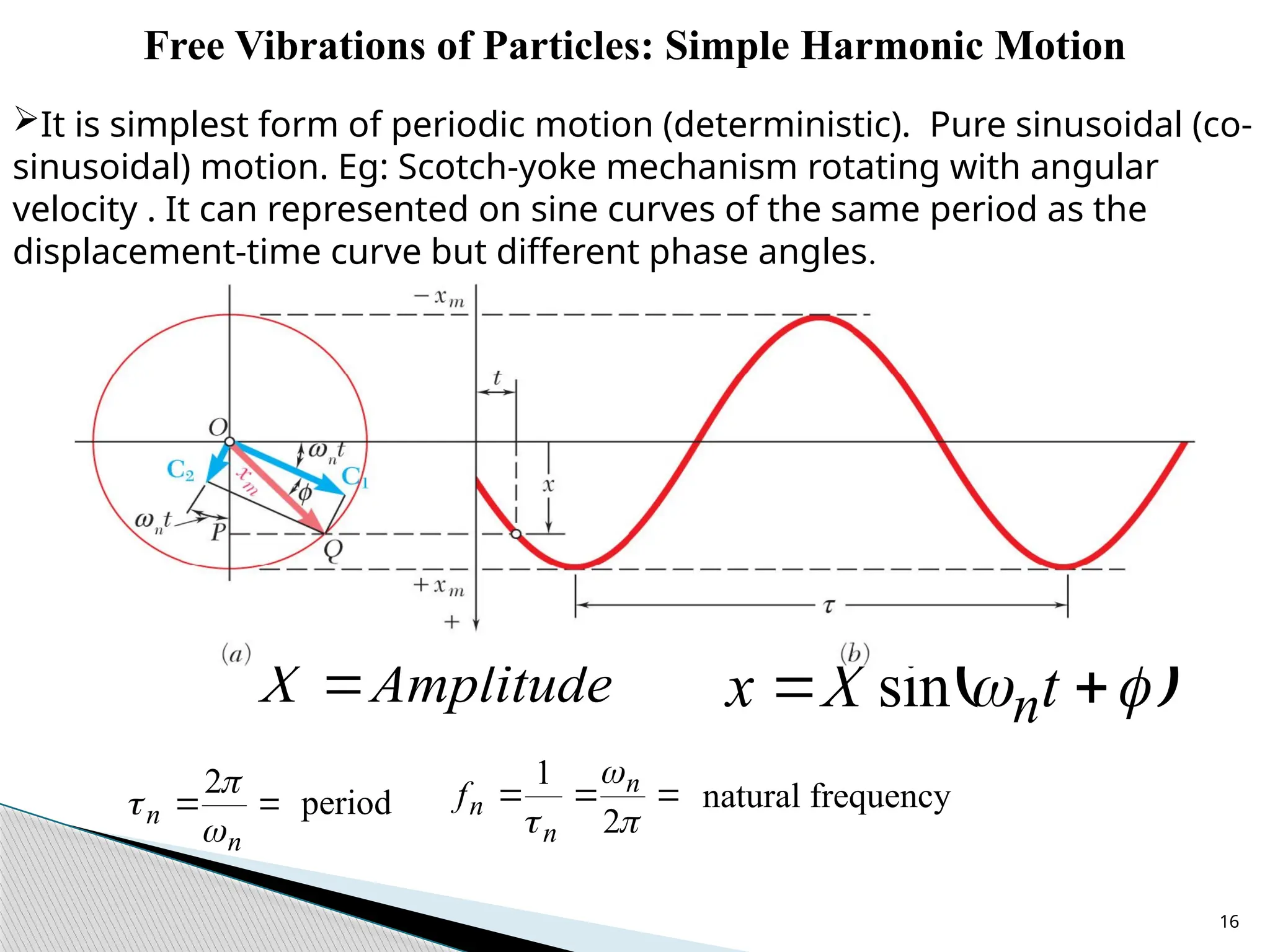
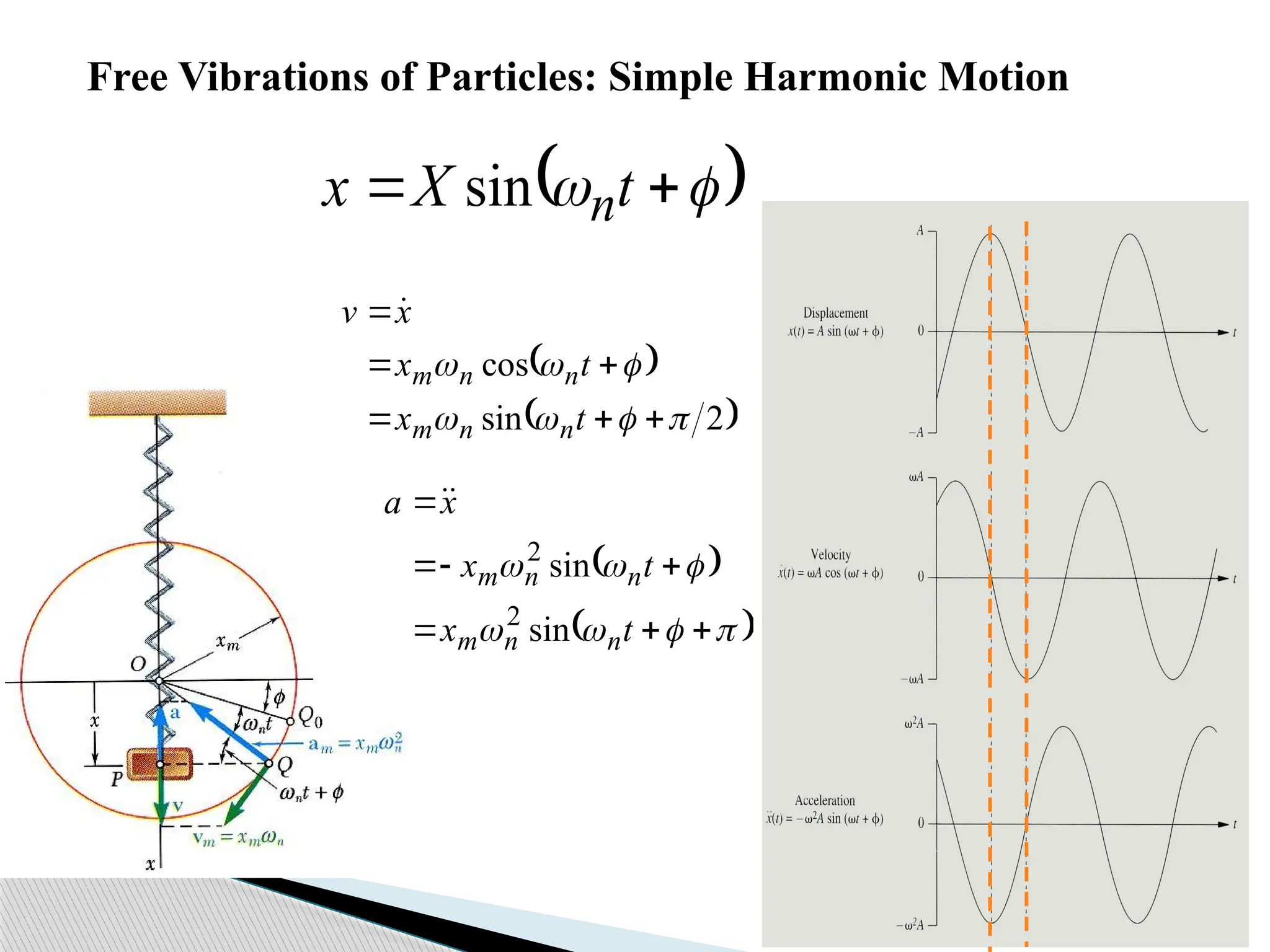
Free Vibrations of Particles: Simple Harmonic Motion
It is simplest form of periodic motion (deterministic). Pure sinusoidal (co-
sinusoidal) motion. Eg: Scotch-yoke mechanism rotating with angular
velocity . It can represented on sine curves of the same period as the
displacement-time curve but different phase angles.