This document provides an overview of vibrations, including:
1) A brief history of vibration studies from Pythagoras to modern scientists like Galileo and Newton. Frahm later proposed using dynamic vibration absorbers to eliminate unwanted vibrations.
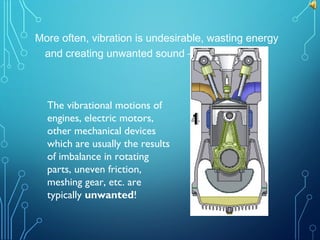
2) It discusses the importance of studying vibrations to reduce failures in machines and structures, and explores applications in manufacturing and other fields.
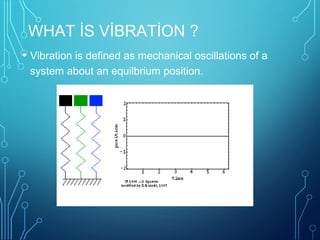
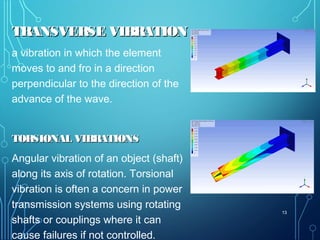
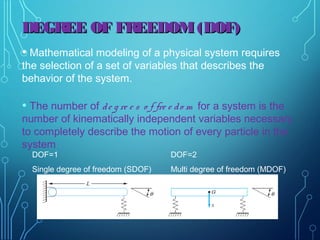
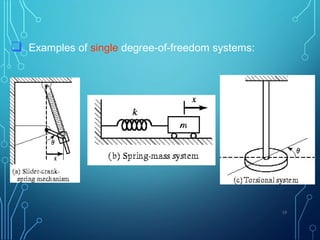
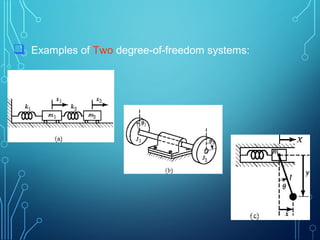
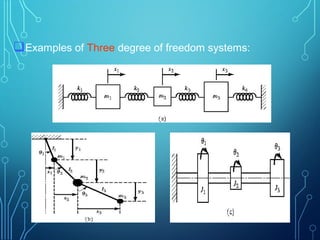
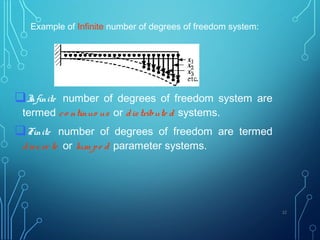
3) Basic concepts of vibrations are introduced like period, frequency, resonance, and the three main types of vibration: longitudinal, transverse, and torsional. Classifications of free and forced vibrations as well as degrees of freedom in systems are also covered.
![VIBRATIONS
SATYENDRA KUMARSANTSATYENDRA KUMARSANT
1630071308516300713085
66THTH
SEM[ JAN- JUNE 2016]SEM[ JAN- JUNE 2016]
1](https://image.slidesharecdn.com/vibrations-170615193753/85/Vibrations-1-320.jpg)
![VIBRATIONS
SATYENDRA KUMARSANTSATYENDRA KUMARSANT
1630071308516300713085
66THTH
SEM[ JAN- JUNE 2016]SEM[ JAN- JUNE 2016]
1](https://image.slidesharecdn.com/vibrations-170615193753/75/Vibrations-1-2048.jpg)