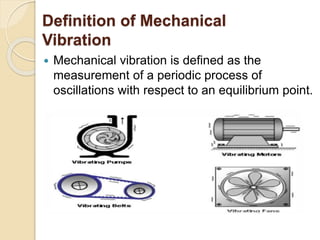
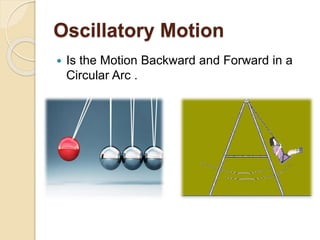
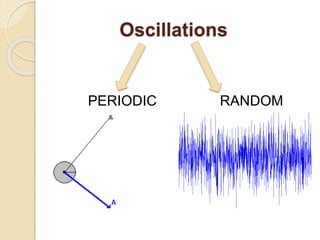
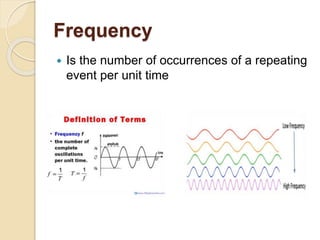
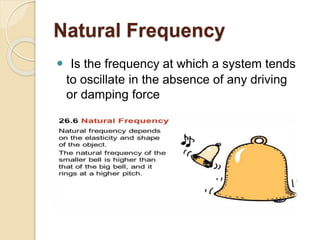
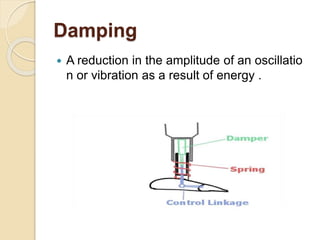
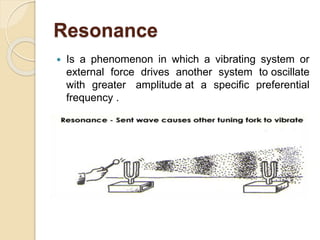
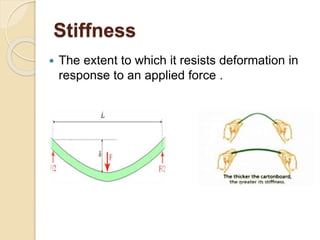
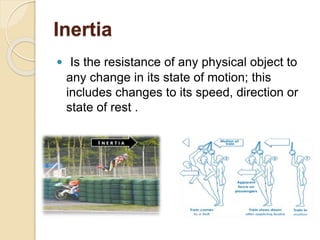
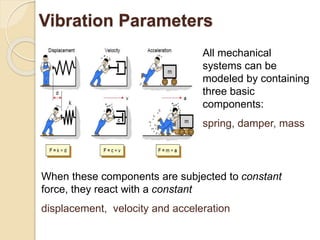
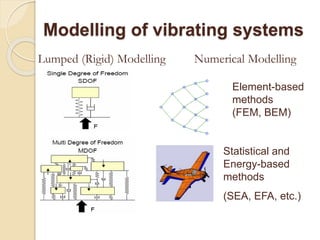
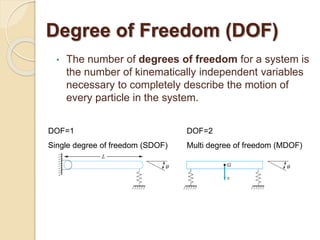
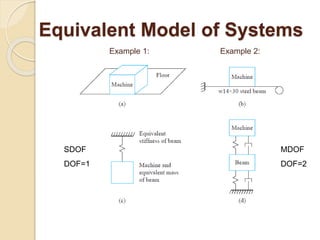
This document provides an introduction to mechanical vibration. It defines vibration as a continuous slight shaking movement and defines mechanical vibration as the measurement of periodic oscillations around an equilibrium point. It discusses different types of vibration including free undamped, free damped, forced damped, forced undamped, and vibration of multi degree of freedom systems. Key concepts discussed include periodic motion, natural frequency, damping, resonance, stiffness, and inertia. Models for analyzing vibration including lumped modeling and finite element modeling are also introduced.