Downloaded 119 times
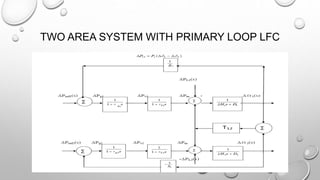
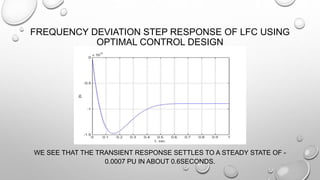
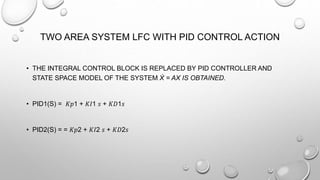
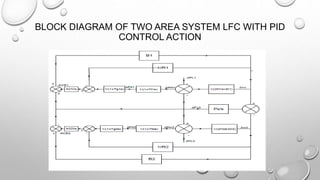
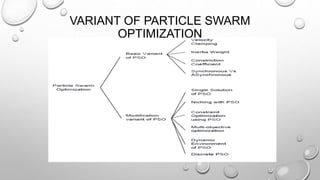
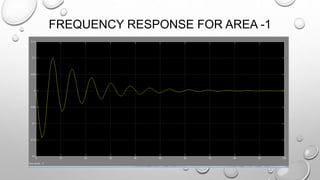
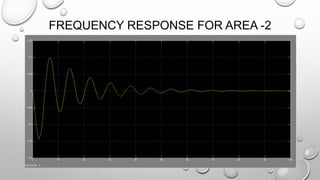
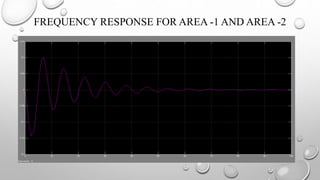


This document investigates load frequency control in a two area power system with multiple variable loads. It compares pole placement and optimal control techniques for load frequency control and finds that the optimal control technique provides better transient response. PID control is also applied and tuned using particle swarm optimization. Frequency response plots demonstrate the system response under different control approaches.






























![Frequency_Control_in_Two_Area_Power_System_Integrating_ppt[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/frequencycontrolintwoareapowersystemintegratingppt1-241111052857-fc615c94-thumbnail.jpg?width=640&height=640&fit=bounds)