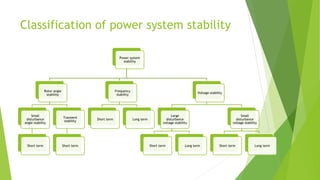
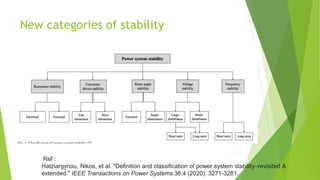
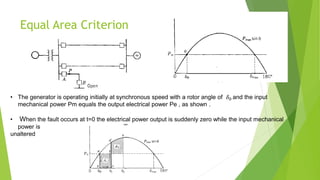
Power system stability refers to the ability of a power system to maintain synchronous operation of generators after experiencing a disturbance such as a fault, load change, or generator loss. There are several types of stability depending on the size of disturbance and time frame. Rotor angle stability concerns maintaining synchronism after small or large disturbances and can be classified as small-signal or transient stability. Transient stability analyzes the ability of the system to maintain synchronism in the seconds after a large disturbance like a fault, using tools like the equal area criterion to determine the critical clearing angle and time.