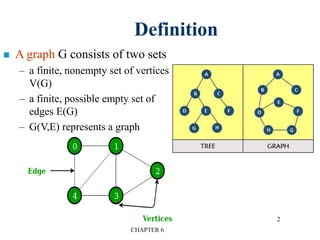
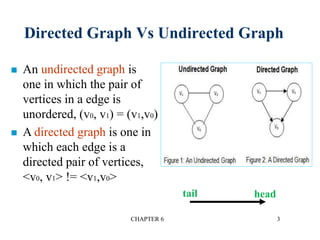
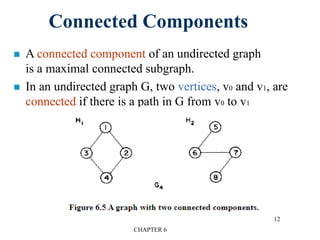
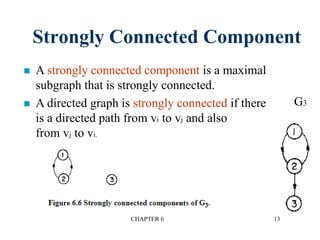
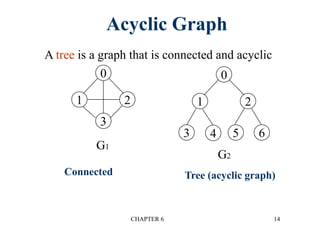
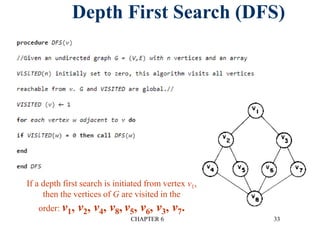
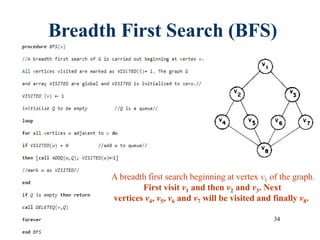
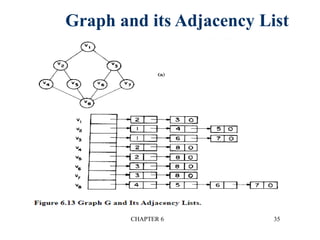
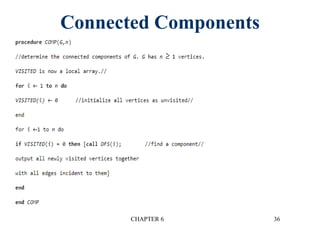
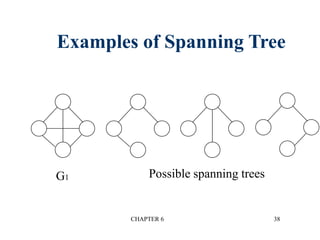
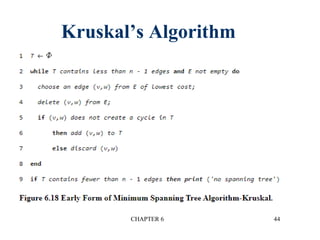
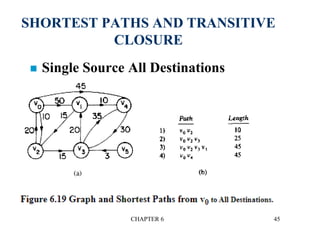
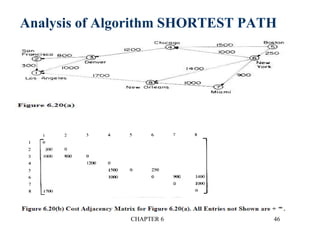
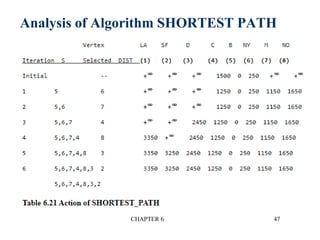
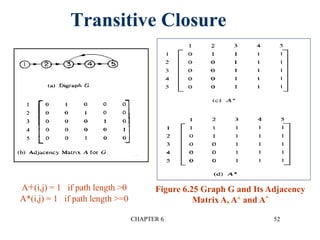
This document provides an overview of graphs and graph algorithms. It defines graphs, directed and undirected graphs, and graph terminology like vertices, edges, paths, cycles, connected components, and degrees. It describes different graph representations like adjacency matrices and adjacency lists. It also explains graph traversal algorithms like depth-first search and breadth-first search. Finally, it covers graph algorithms for finding minimum spanning trees, shortest paths, and transitive closure.