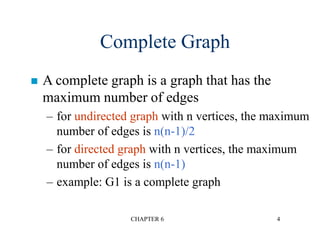
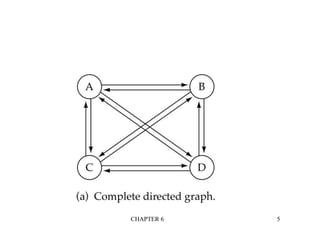
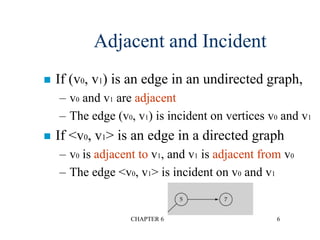
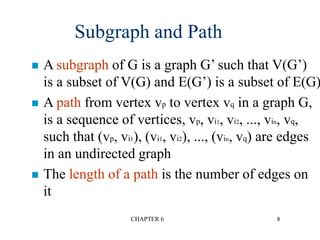
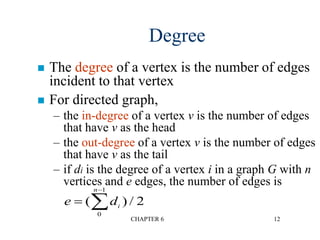
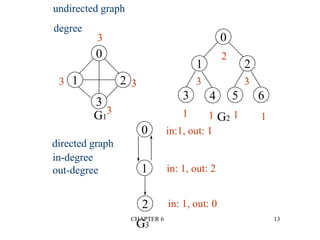
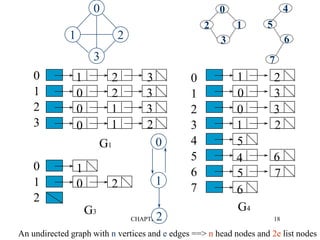
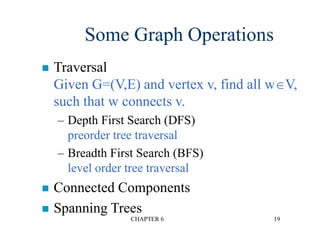
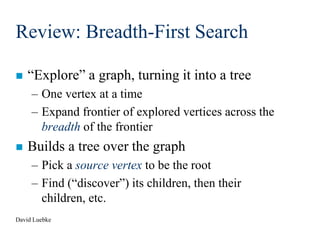
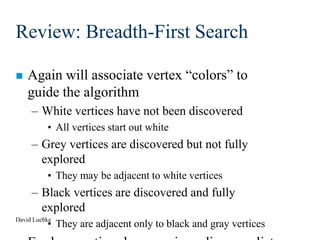
The document discusses graphs and graph algorithms. It defines graphs and their components such as vertices, edges, directed/undirected graphs. It provides examples of graphs and discusses graph representations using adjacency matrices and adjacency lists. It also describes common graph operations like traversal algorithms (depth-first search and breadth-first search), finding connected components, and spanning trees.
![CHAPTER 6 15
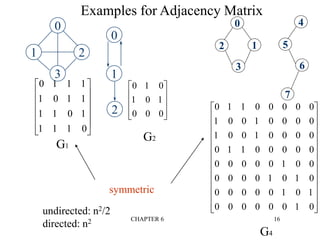
Adjacency Matrix
Let G=(V,E) be a graph with n vertices.
The adjacency matrix of G is a two-dimensional
n by n array, say adj_mat
If the edge (vi, vj) is in E(G), adj_mat[i][j]=1
If there is no such edge in E(G), adj_mat[i][j]=0
The adjacency matrix for an undirected graph is
symmetric; the adjacency matrix for a digraph
need not be symmetric](https://image.slidesharecdn.com/tu21z55lstuivmdaby7r-signature-ebac220b40f52b1138ea4ecc20d36a25d7d1287fe4496571fc695452f5ae1068-poli-201021034552/85/Grpahs-in-Data-Structure-15-320.jpg)
![CHAPTER 6 17
Data Structures for Adjacency Lists
#define MAX_VERTICES 50
typedef struct node *node_pointer;
typedef struct node {
int vertex;
struct node *link;
};
node_pointer graph[MAX_VERTICES];
int n=0; /* vertices currently in use */
Each row in adjacency matrix is represented as an adjacency list.](https://image.slidesharecdn.com/tu21z55lstuivmdaby7r-signature-ebac220b40f52b1138ea4ecc20d36a25d7d1287fe4496571fc695452f5ae1068-poli-201021034552/85/Grpahs-in-Data-Structure-17-320.jpg)













































![제 23회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [MBOAX] : ABSA를 활용한 소비자 반응 분석 기반 운영 효율화 대시보드 설계](https://cdn.slidesharecdn.com/ss_thumbnails/3-1boaz23rdconferencemboax-260203102709-9d519923-thumbnail.jpg?width=640&height=640&fit=bounds)


















