Downloaded 55 times


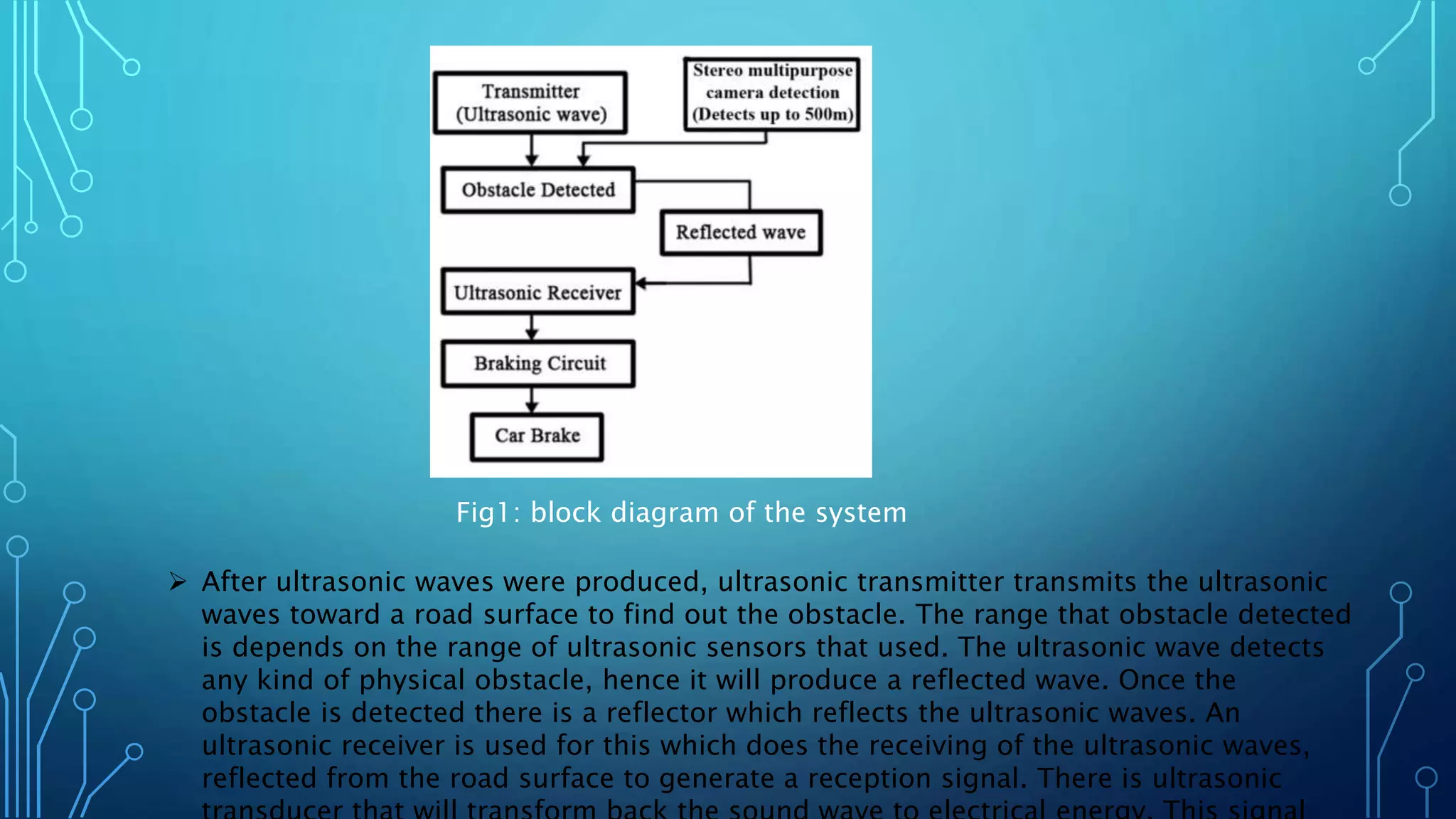

This document summarizes a student project to develop an ultrasonic sensor-based system to prevent vehicle collisions. A group of 4 students are working on the project under the guidance of Ms. E. Swetha and Mrs. Swapna Kumari. B. The system uses ultrasonic sensors to detect obstacles and automatically activates the emergency braking system. When an obstacle is detected, ultrasonic waves are reflected back and received by a receiver. This triggers the braking circuit to apply maximum brakes to stop the vehicle and prevent an accident. The goal is to develop a safety system that can brake a car automatically based on sensor input to reduce accidents caused by delayed braking.








![Smart accident detector and intimator [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/smartaccidentdetectorandintimatorautosaved-180331150920-thumbnail.jpg?width=640&height=640&fit=bounds)