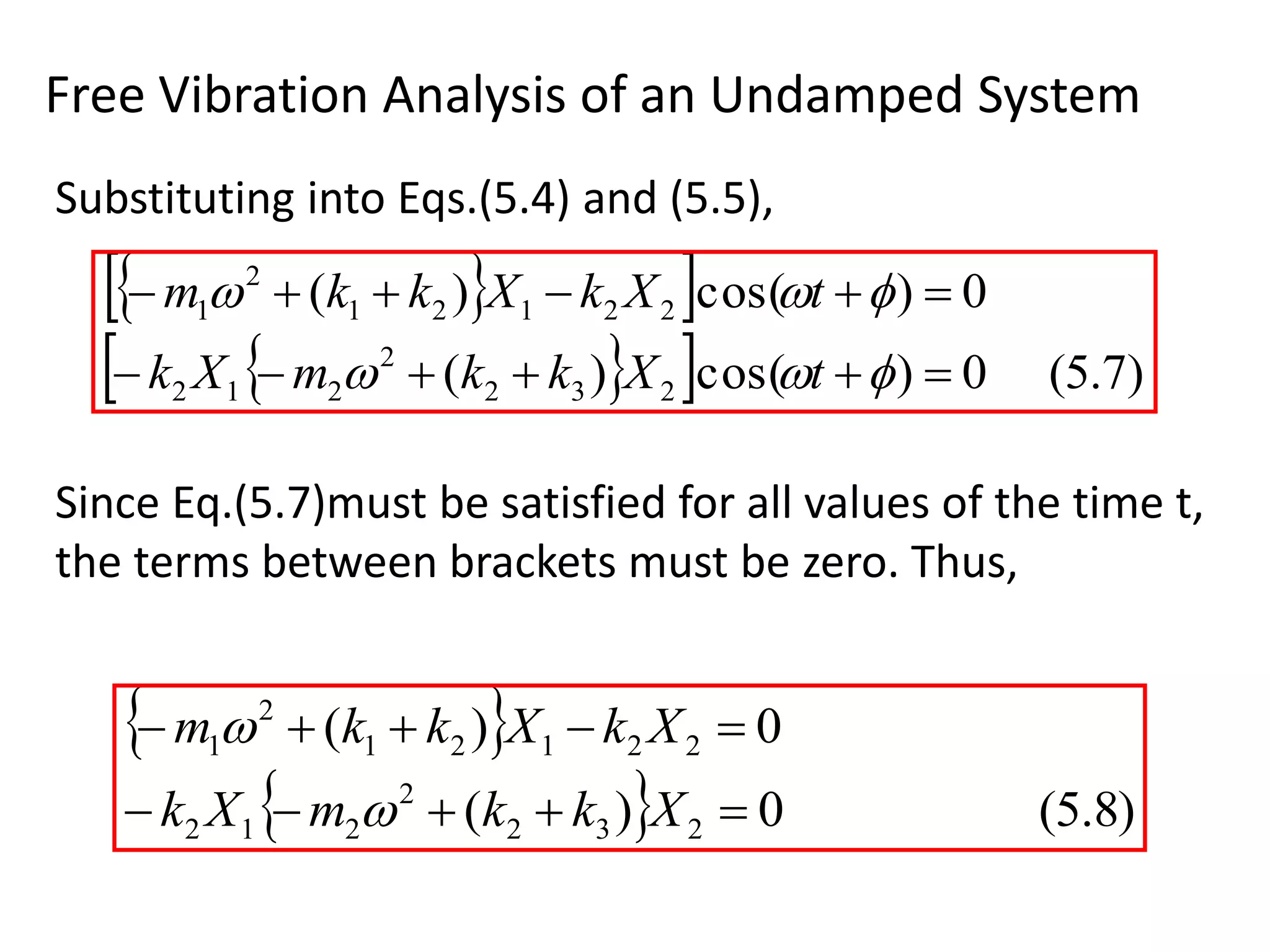
This document discusses two degree of freedom systems and provides equations of motion for a two degree of freedom spring-mass system with damping. It presents the matrix form of the equations of motion and defines the mass, damping and stiffness matrices. It then analyzes the free vibration of an undamped two degree of freedom system, determining the natural frequencies and normal modes of vibration. The normal modes allow expressing the motion as a superposition of the individual mode shapes.

![Equations of Motion for Forced Vibration
)2.5()()(
)1.5()()(
2232122321222
1221212212111
Fxkkxkxccxcxm
Fxkxkkxcxccxm
)3.5()()(][)(][)(][ tFtxktxctxm
Both equations can be written in matrix form as
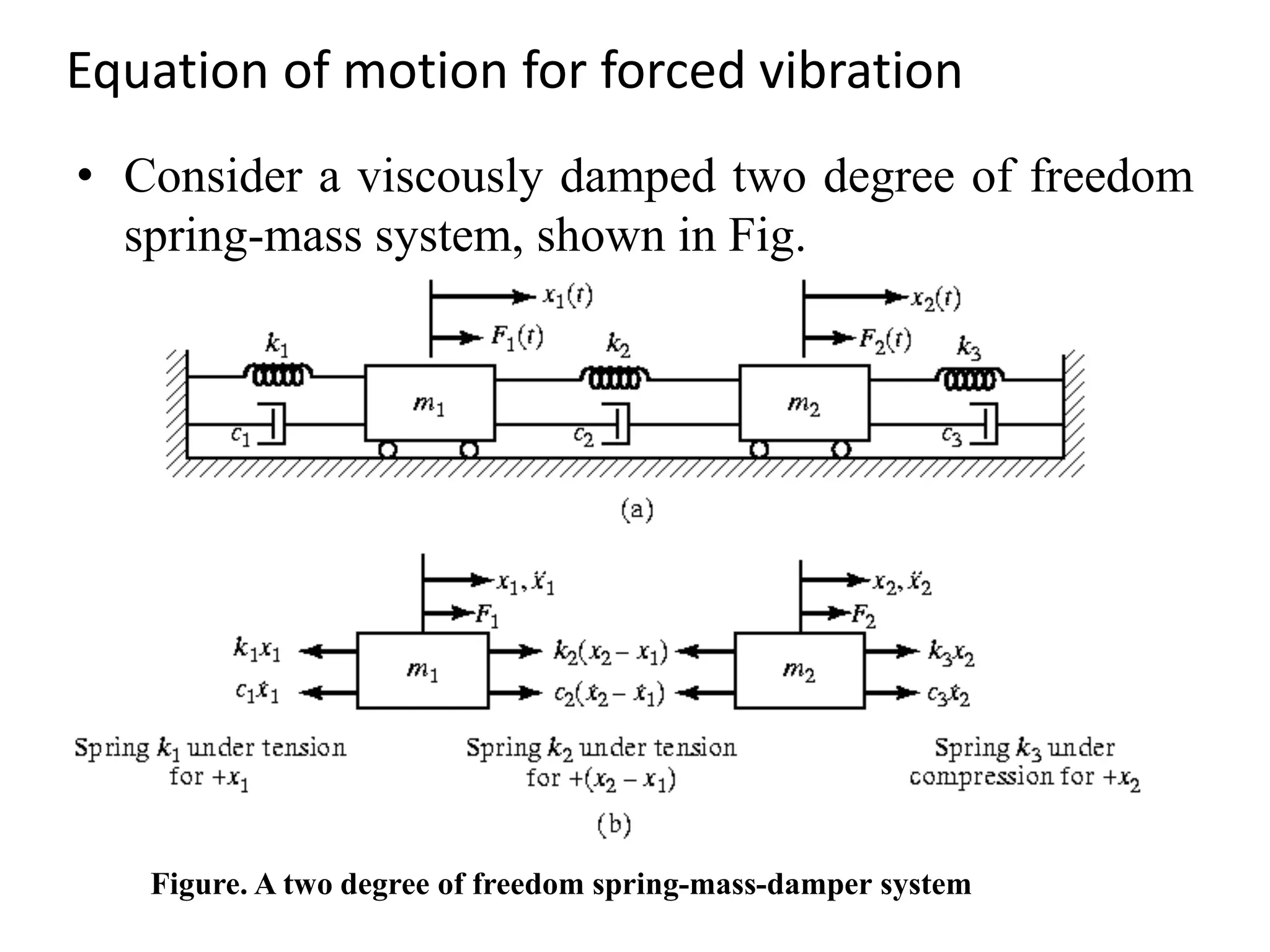
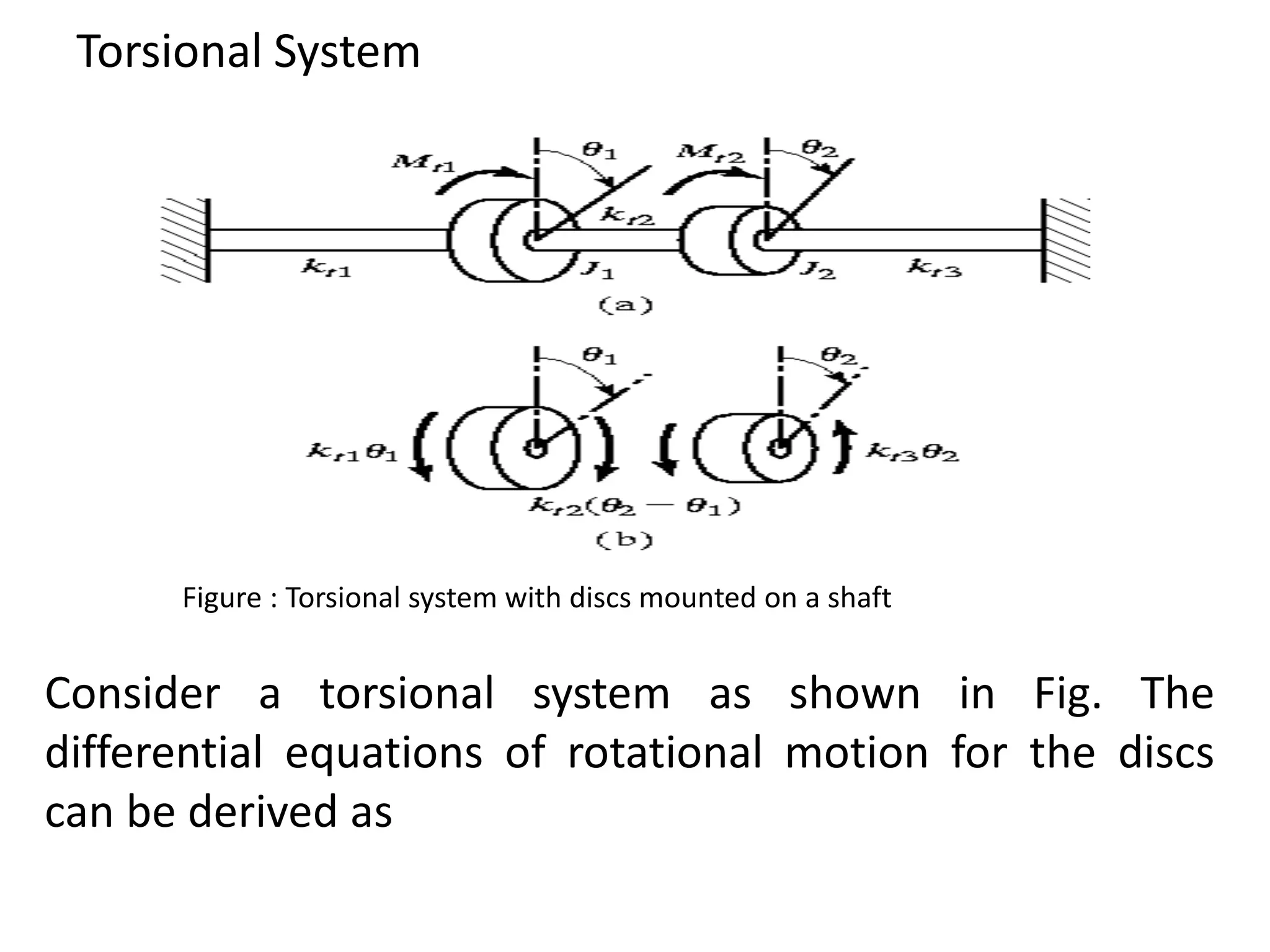
The application of Newton’s second law of motion to each
of the masses gives the equations of motion:
where [m], [c], and [k] are called the mass, damping,
and stiffness matrices, respectively, and are given by](https://image.slidesharecdn.com/2161901150123119039dme-170323115454/75/two-degree-of-freddom-system-4-2048.jpg)
![Equations of Motion for Forced Vibration
322
221
322
221
2
1
][
][
0
0
][
kkk
kkk
k
ccc
ccc
c
m
m
m
)(
)(
)(
)(
)(
)(
2
1
2
1
tF
tF
tF
tx
tx
tx
And the displacement and force vectors are given
respectively:
It can be seen that the matrices [m], [c], and [k] are all 2 x
2 matrices whose elements are known masses, damping
coefficient and stiffnesses of the system, respectively.](https://image.slidesharecdn.com/2161901150123119039dme-170323115454/75/two-degree-of-freddom-system-5-2048.jpg)
![Equations of Motion for Forced Vibration
][][],[][],[][ kkccmm TTT
6
where the superscript T denotes the transpose of the
matrix.
oThe solution of Eqs.(5.1) and (5.2) involves four
constants of integration (two for each equation). Usually
the initial displacements and velocities of the two masses
are specified as
oFurther, these matrices can be seen to be symmetric,
so that,
x1(t = 0) = x1(0) and 1( t = 0) = 1(0),
x2(t = 0) = x2(0) and 2 (t = 0) = 2(0).
x
x x
x](https://image.slidesharecdn.com/2161901150123119039dme-170323115454/75/two-degree-of-freddom-system-6-2048.jpg)















![Solution
(E.4))()()(
)()()(
212
211
tqtqtx
tqtqtx
(E.5))]()([
2
1
)(
)]()([
2
1
)(
212
211
txtxtq
txtxtq
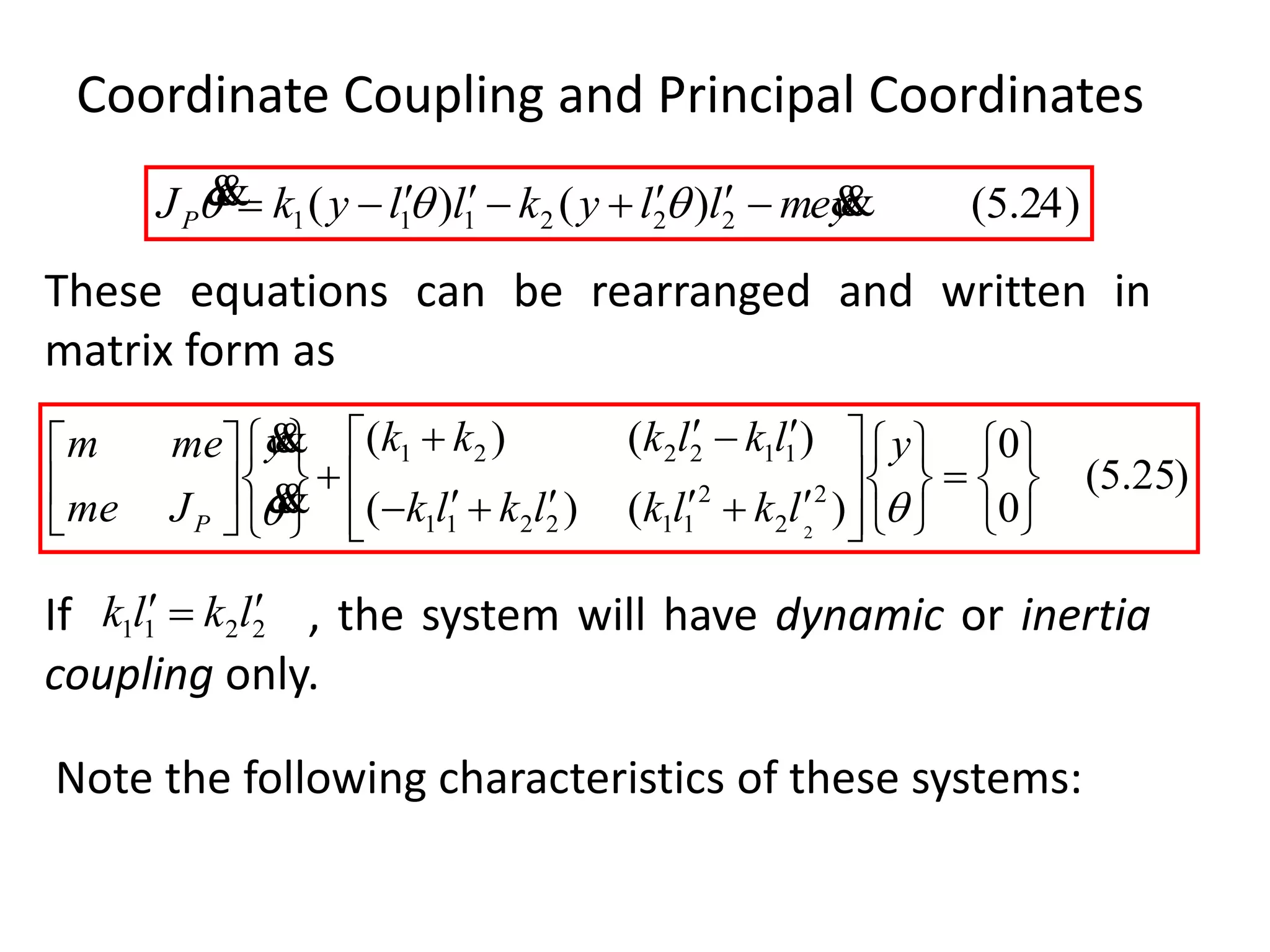
The solution of Eqs.(E.4) gives the principal coordinates:
From Eqs.(E.1) and (E.2), we can write](https://image.slidesharecdn.com/2161901150123119039dme-170323115454/75/two-degree-of-freddom-system-31-2048.jpg)