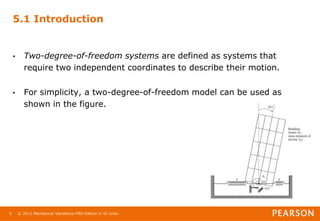
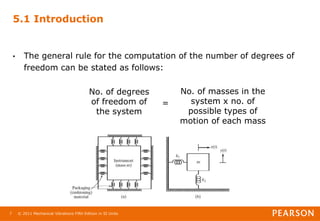
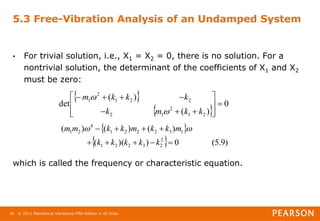
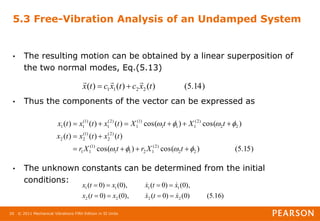
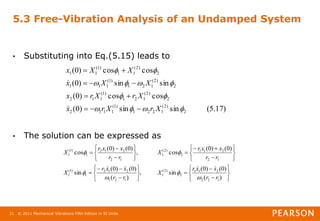
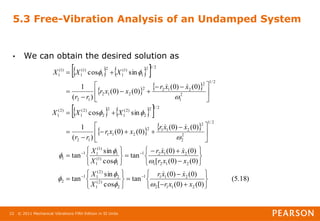
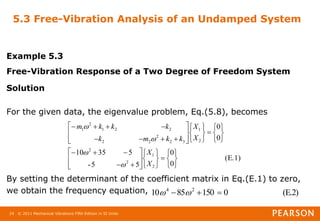
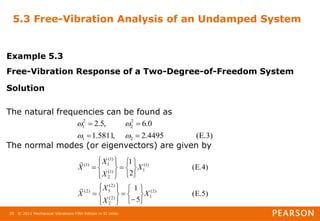
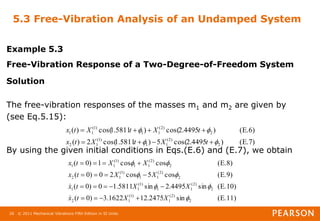
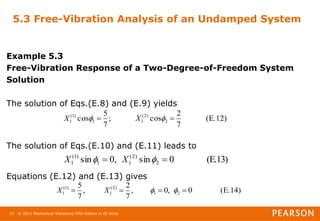
This document chapter discusses two-degree-of-freedom vibrational systems. It introduces two-degree-of-freedom models and defines generalized coordinates. It derives the equations of motion for forced vibration of a damped two-mass spring system. It then analyzes the free vibration of an undamped two-degree system, determining the natural frequencies from the characteristic equation. The normal modes of vibration are expressed in terms of the natural frequencies and mode shapes.


![© 2011 Mechanical Vibrations Fifth Edition in SI Units
11
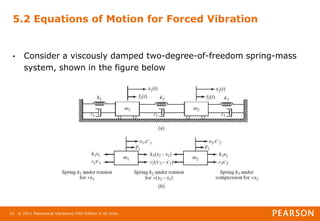
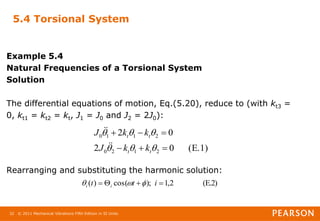
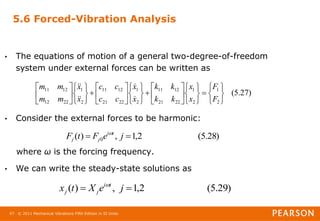
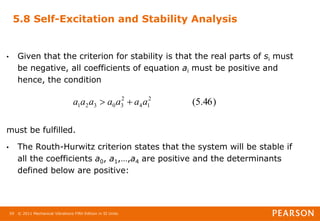
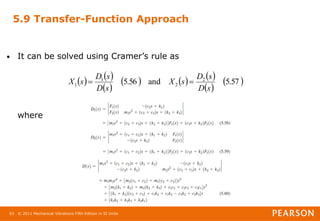
5.2 Equations of Motion for Forced Vibration
• The application of Newton’s second law of motion to each of the
masses gives the equations of motion:
• Both equations can be written in matrix form as
where [m], [c], and [k] are called the mass, damping, and stiffness
matrices, respectively, and are given by
)
2
.
5
(
)
(
)
(
)
1
.
5
(
)
(
)
(
2
2
3
2
1
2
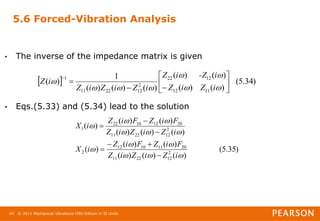
2
3
2
1
2
2
2
1
2
2
1
2
1
2
2
1
2
1
1
1
F
x
k
k
x
k
x
c
c
x
c
x
m
F
x
k
x
k
k
x
c
x
c
c
x
m
)
3
.
5
(
)
(
)
(
]
[
)
(
]
[
)
(
]
[ t
F
t
x
k
t
x
c
t
x
m
](https://image.slidesharecdn.com/vdocument-211211071944/85/Vdocument-in-vibration-chapter05-11-320.jpg)
![© 2011 Mechanical Vibrations Fifth Edition in SI Units
12
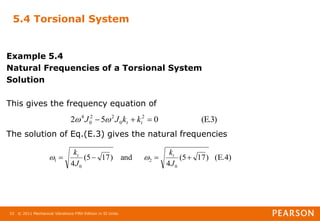
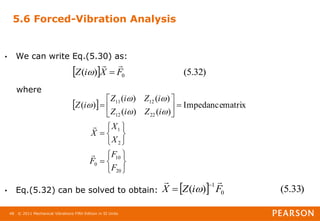
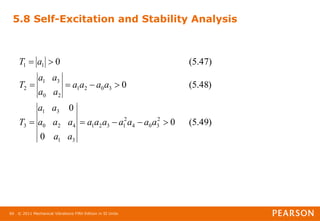
5.2 Equations of Motion for Forced Vibration
• We have
• And the displacement and force vectors are given respectively:
• It can be seen that the matrices [m], [c], and [k] are symmetric:
where the superscript T denotes the transpose of the matrix.
3
2
2
2
2
1
3
2
2
2
2
1
2
1
]
[
]
[
0
0
]
[
k
k
k
k
k
k
k
c
c
c
c
c
c
c
m
m
m
)
(
)
(
)
(
)
(
)
(
)
(
2
1
2
1
t
F
t
F
t
F
t
x
t
x
t
x
]
[
]
[
],
[
]
[
],
[
]
[ k
k
c
c
m
m T
T
T
](https://image.slidesharecdn.com/vdocument-211211071944/85/Vdocument-in-vibration-chapter05-12-320.jpg)
![© 2011 Mechanical Vibrations Fifth Edition in SI Units
45
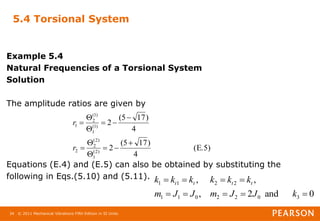
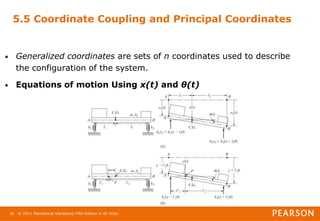
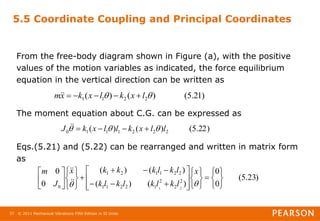
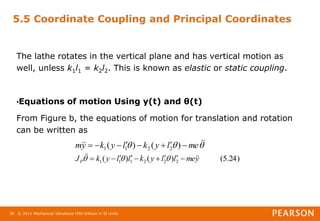
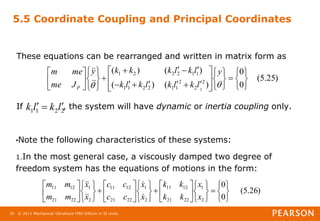
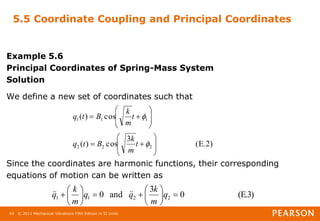
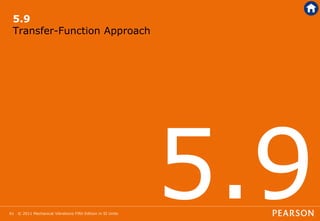
5.5 Coordinate Coupling and Principal Coordinates
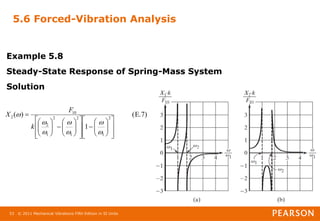
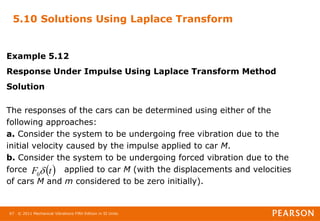
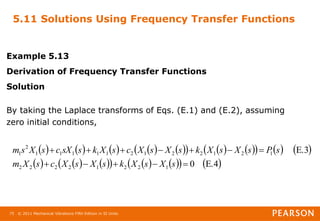
Example 5.6
Principal Coordinates of Spring-Mass System
Solution
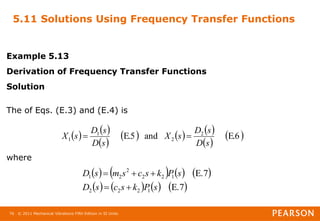
From Eqs.(E.1) and (E.2), we can write
The solution of Eqs.(E.4) gives the principal coordinates:
(E.4)
)
(
)
(
)
(
)
(
)
(
)
(
2
1
2
2
1
1
t
q
t
q
t
x
t
q
t
q
t
x
(E.5)
)]
(
)
(
[
2
1
)
(
)]
(
)
(
[
2
1
)
(
2
1
2
2
1
1
t
x
t
x
t
q
t
x
t
x
t
q
](https://image.slidesharecdn.com/vdocument-211211071944/85/Vdocument-in-vibration-chapter05-45-320.jpg)
![© 2011 Mechanical Vibrations Fifth Edition in SI Units
57
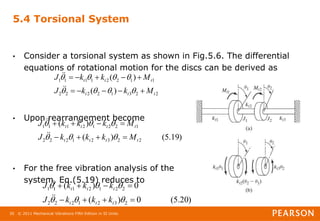
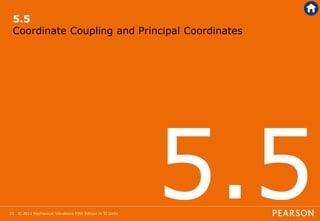
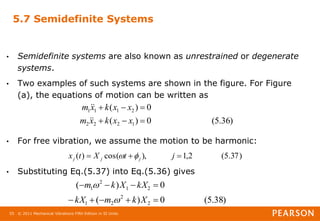
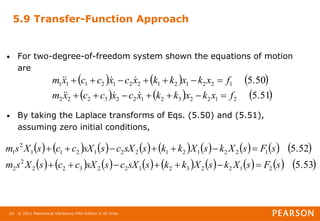
5.7 Semidefinite Systems
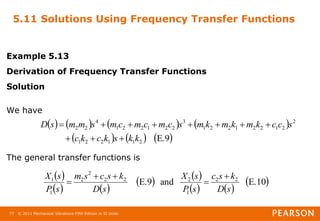
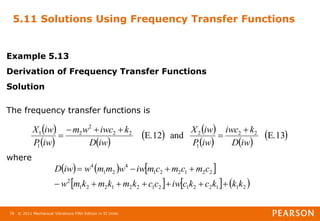
• We obtain the frequency equation as
• From which the natural frequencies can be obtained:
• Such systems, which have one of the natural frequencies equal to
zero, are called semidefinite systems.
)
39
.
5
(
0
)]
(
[ 2
1
2
2
1
2
m
m
k
m
m
)
40
.
5
(
)
(
and
0
2
1
2
1
2
1
m
m
m
m
k
](https://image.slidesharecdn.com/vdocument-211211071944/85/Vdocument-in-vibration-chapter05-57-320.jpg)

































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)


