Download to read offline

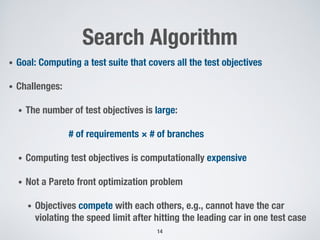
![MOSA: Many-Objective Search-
based Test Generation
15
Objective 1
Objective 2
Not all (non-dominated) solutions
are optimal for the purpose of testing
Panichella et. al.
[ICST 2015]](https://image.slidesharecdn.com/ase2018-shiva-180905140756/85/Testing-Autonomous-Cars-for-Feature-Interaction-Failures-using-Many-Objective-Search-15-320.jpg)
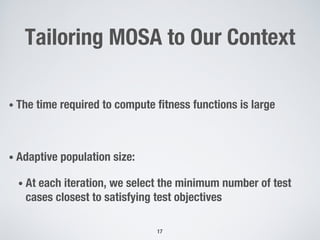
![MOSA: Many-Objective Search-
based Test Generation
16
Objective 1
Objective 2
Not all (non-dominated) solutions
are optimal for the purpose of testing
These points are
better than others
Panichella et. al.
[ICST 2015]](https://image.slidesharecdn.com/ase2018-shiva-180905140756/85/Testing-Autonomous-Cars-for-Feature-Interaction-Failures-using-Many-Objective-Search-16-320.jpg)
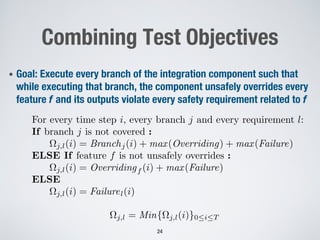
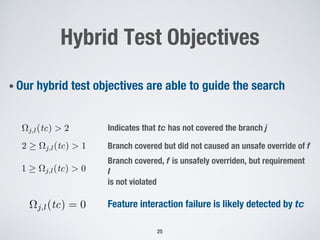

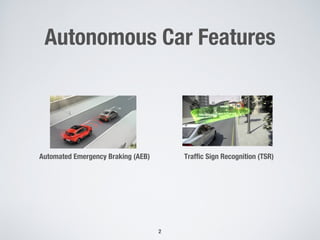
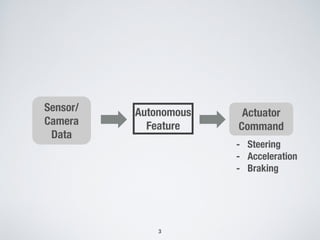
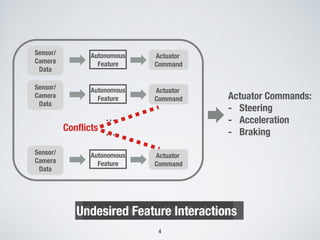
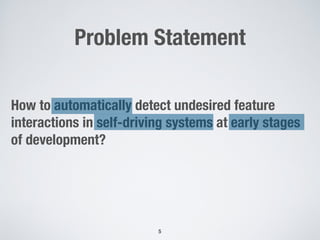
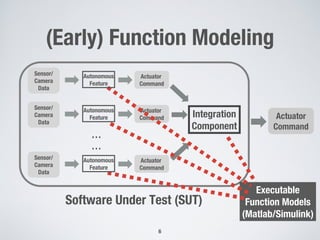
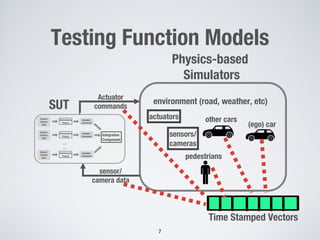
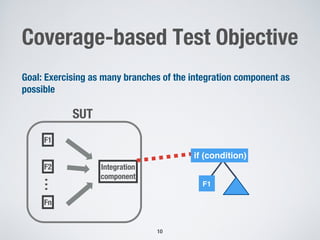
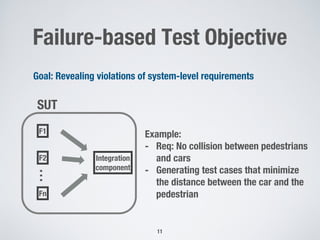
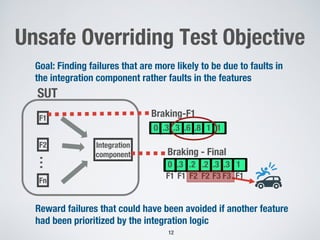
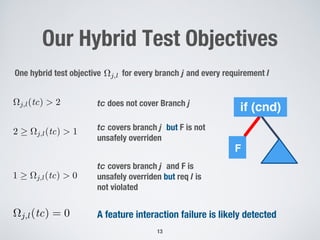
This document proposes a search-based testing approach to automatically detect undesired feature interactions in self-driving systems during early development stages. It defines hybrid test objectives that combine coverage-based, failure-based, and unsafe overriding criteria. A tailored many-objective search algorithm is used to generate test cases that satisfy the objectives. An empirical evaluation on two industrial case study systems found the hybrid objectives revealed significantly more feature interaction failures than baseline objectives. Domain experts validated the identified failures were previously unknown and suggested ways to improve the feature integration logic.