Download to read offline
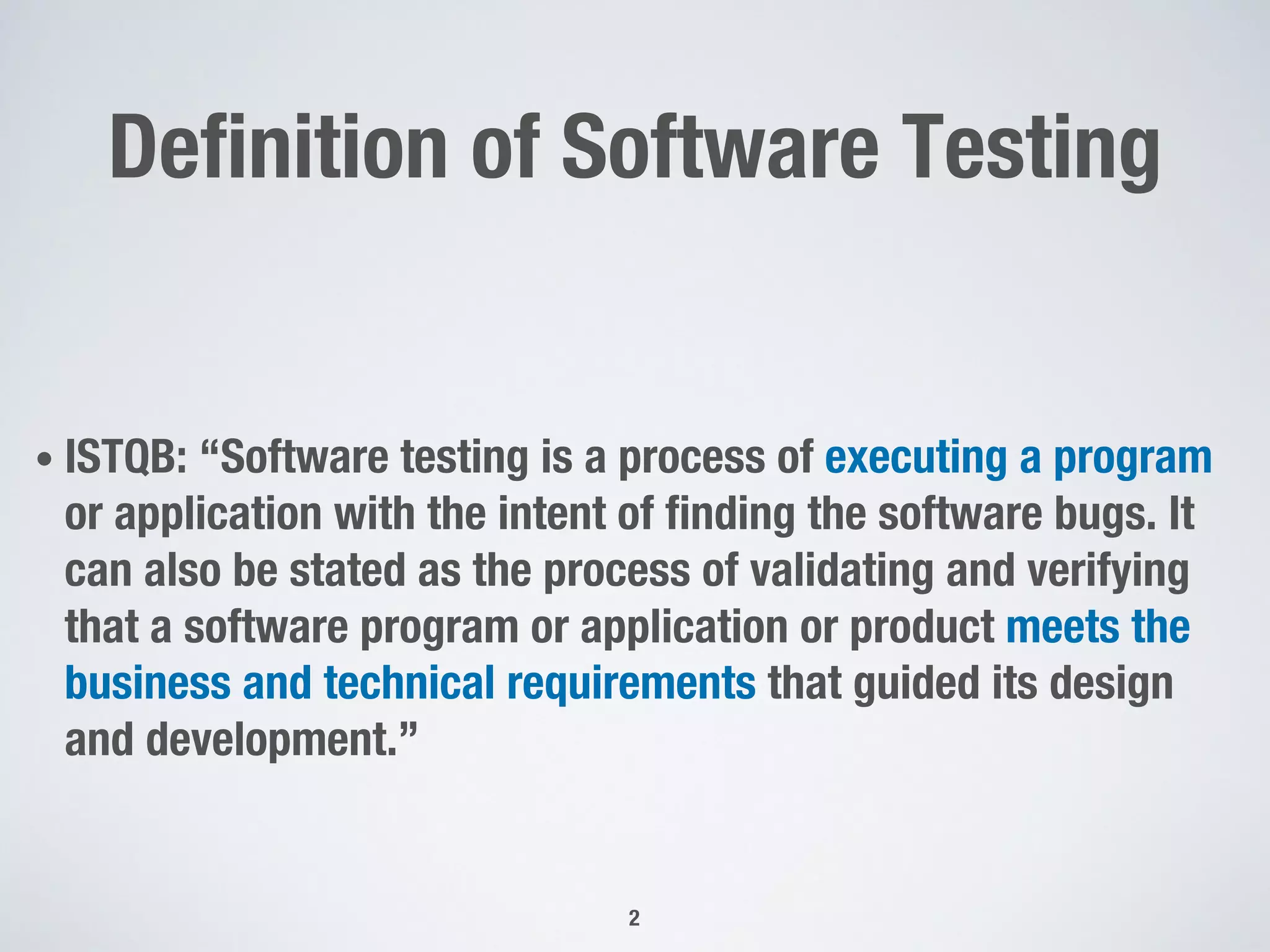




![Software Testing
9
SW Representation
(e.g., specifications)
SW Code
Derive Test cases
Execute Test cases
Compare
Expected
Results or properties
Get Test Results
Test Oracle
[Test Result==Oracle][Test Result!=Oracle]
Automation!](https://image.slidesharecdn.com/presentation-181208032007/75/Presentation-by-Lionel-Briand-9-2048.jpg)




























)
RoadTopology
(CR = [10 40](m))
“non-critical” 31%
“critical” 69%
“non-critical” 72%
“critical” 28%](https://image.slidesharecdn.com/presentation-181208032007/75/Presentation-by-Lionel-Briand-45-2048.jpg)



![• Supercharger bypass flap controller
üFlap position is bounded within
[0..1]
üImplemented in MATLAB/Simulink
ü34 (sub-)blocks decomposed into 6
abstraction levels
Supercharger
Bypass Flap
Supercharger
Bypass Flap
Flap position = 0 (open) Flap position = 1 (closed)
Simple Example
52](https://image.slidesharecdn.com/presentation-181208032007/75/Presentation-by-Lionel-Briand-52-2048.jpg)














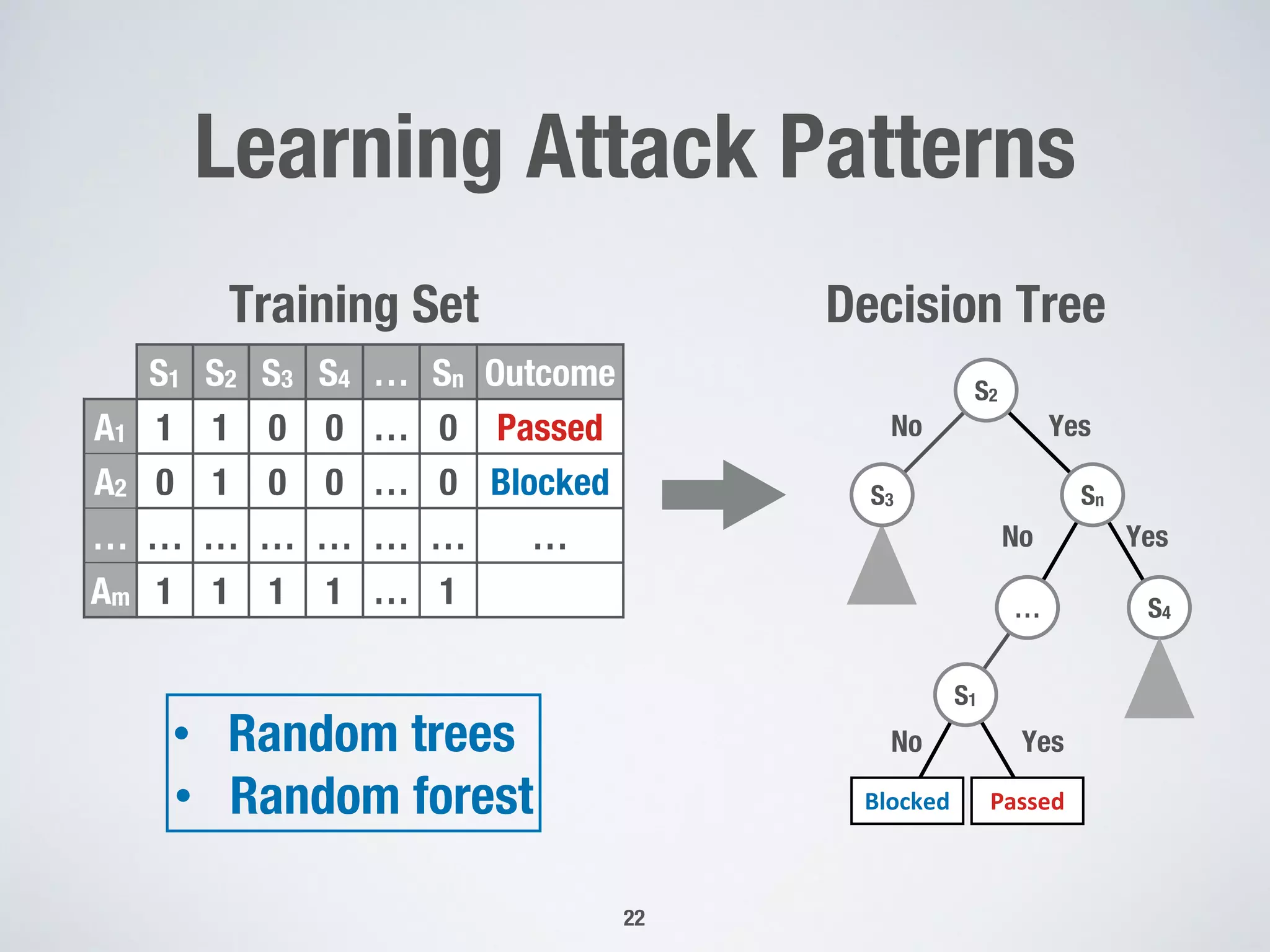
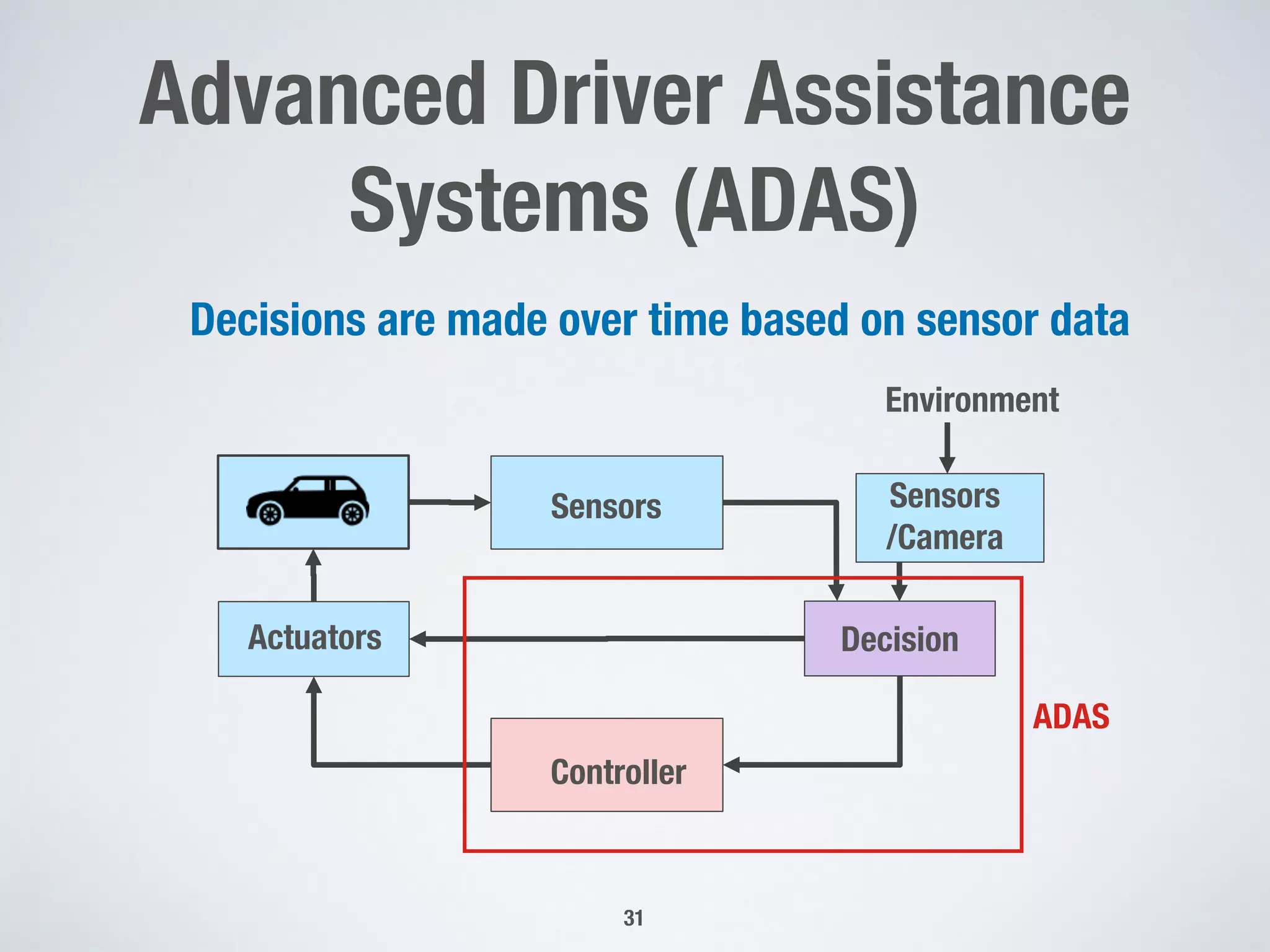
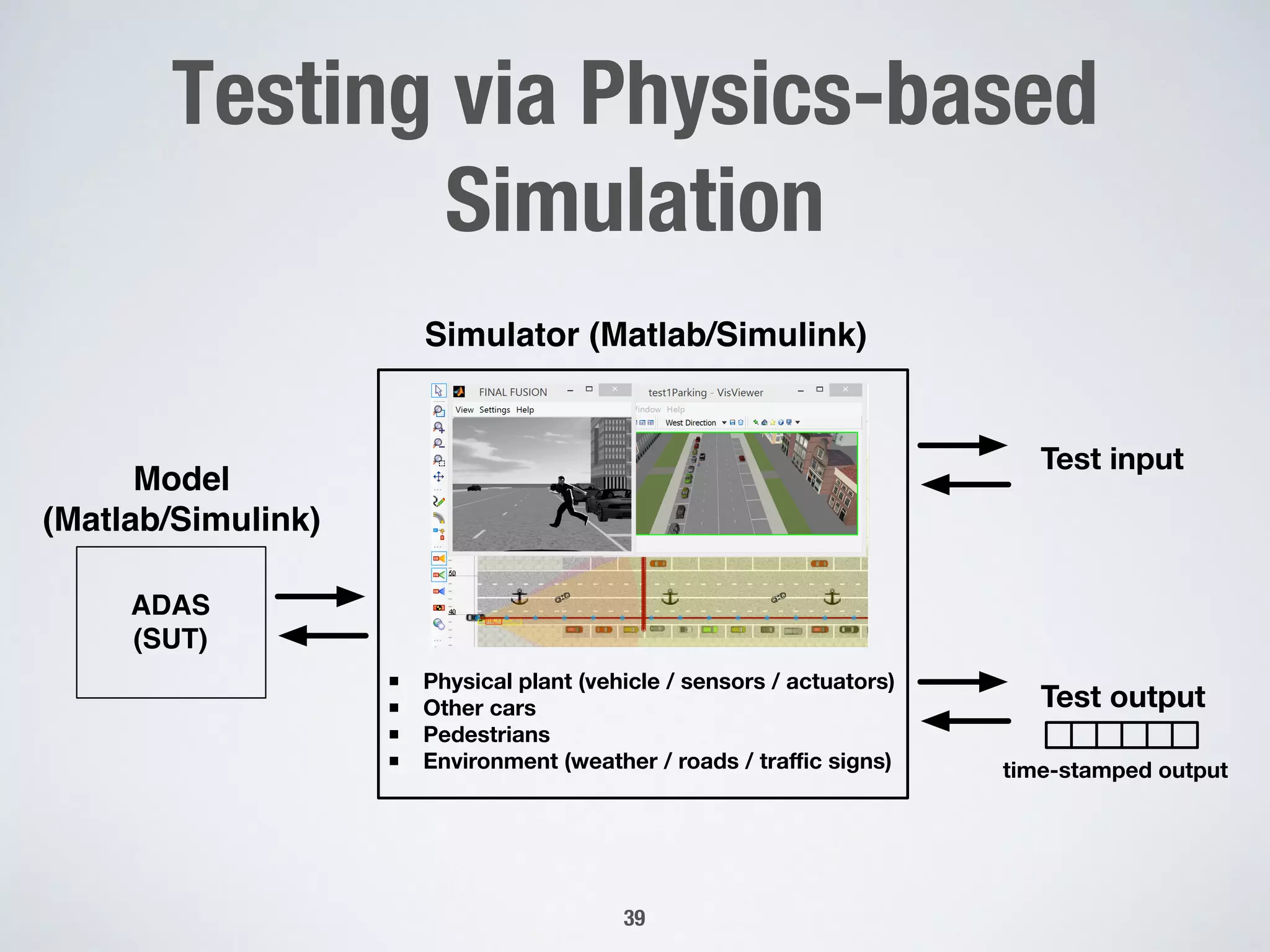
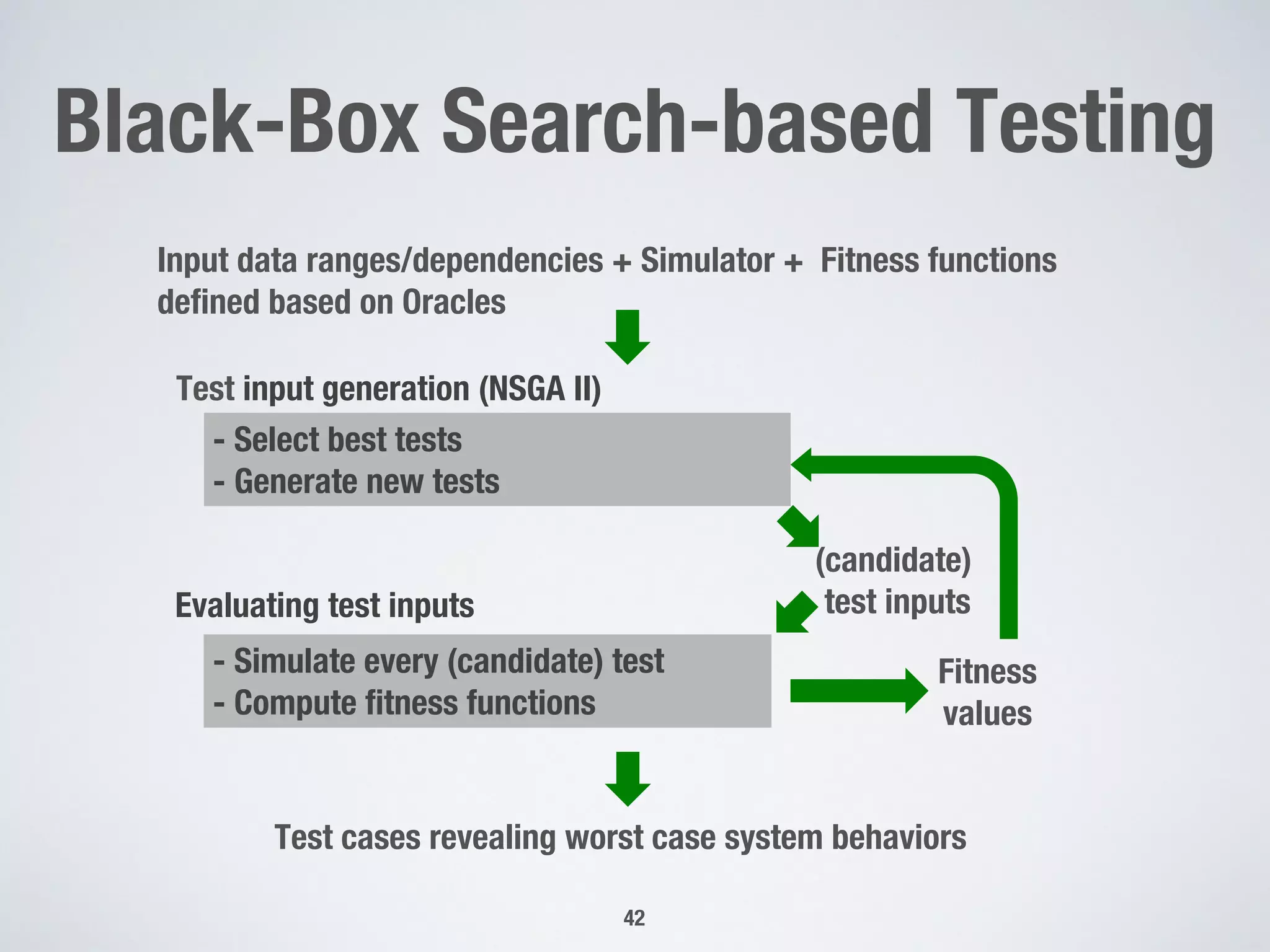
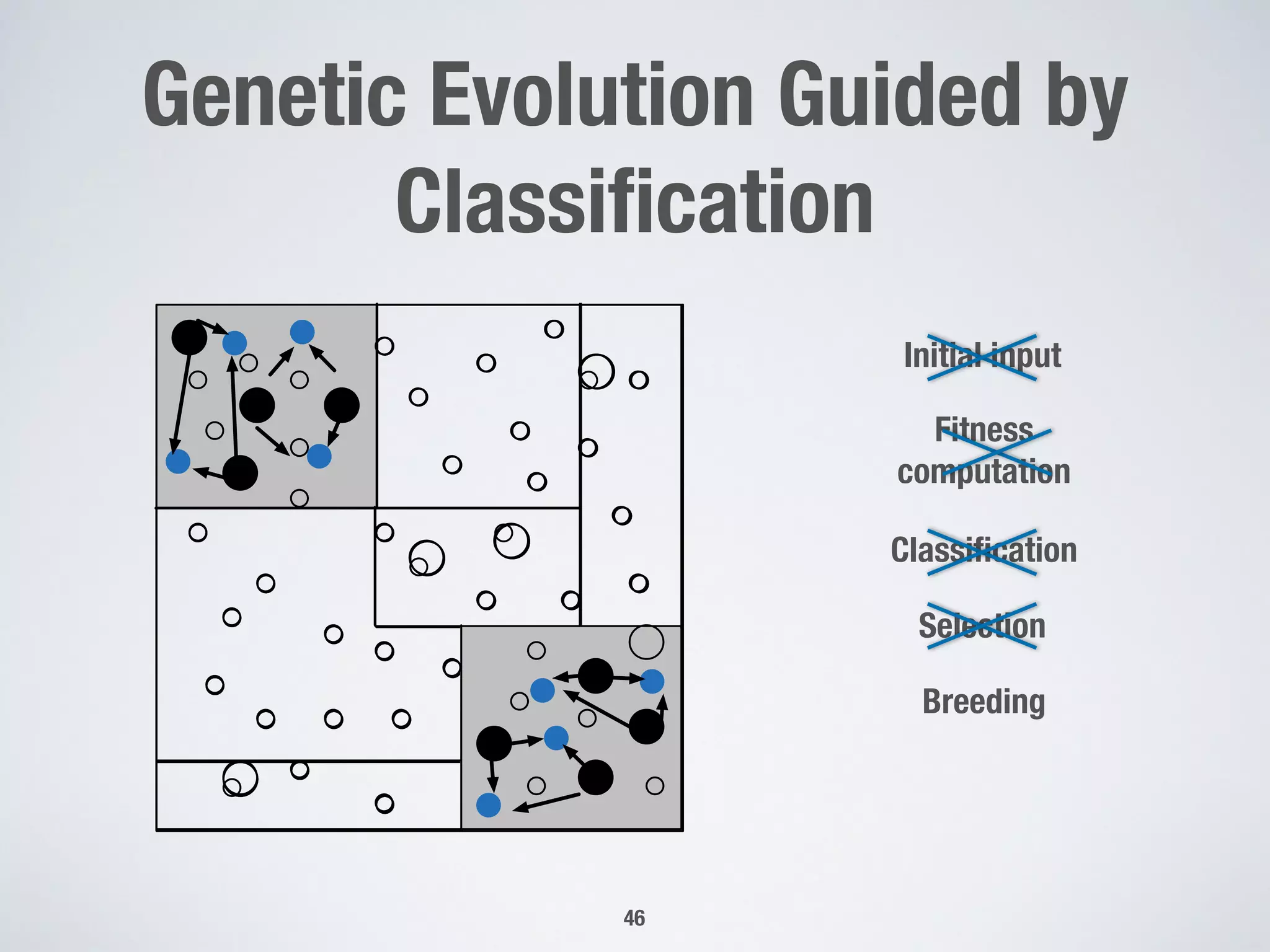
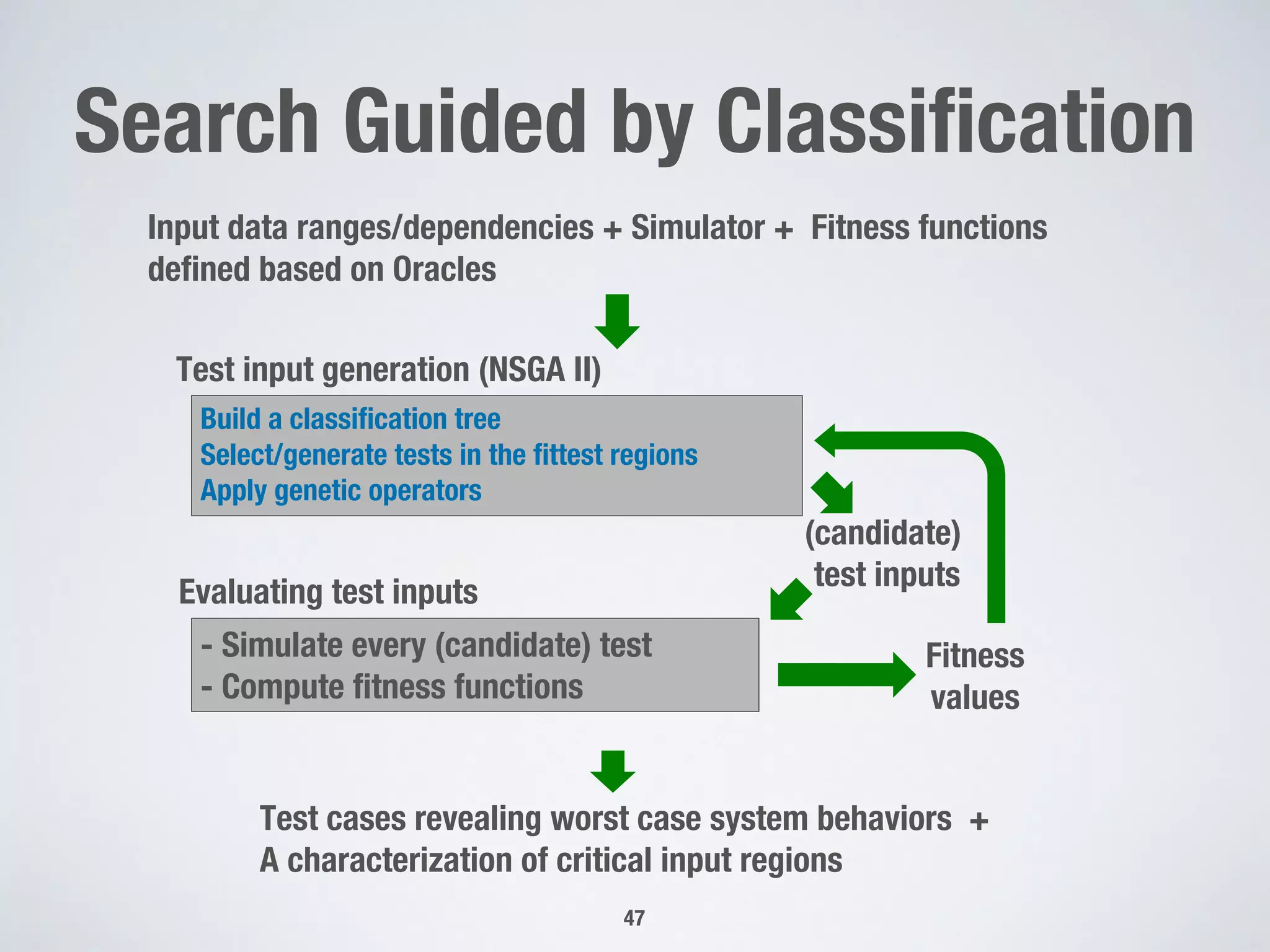
This document discusses techniques for testing advanced driver assistance systems (ADAS) through physics-based simulation. It faces challenges due to the large, complex, and multidimensional test input space as well as the computational expense of simulation. The document proposes using a genetic algorithm guided by decision trees to more efficiently search for critical test cases. Classification trees are built to partition the input space into homogeneous regions in order to better guide the selection and generation of test inputs toward more critical areas.