Downloaded 65 times

![other hand, using SGD will be faster because you use
only one training sample and it starts improving itself
right away from the first sample.
SGD often converges much faster compared to GD
but the error function is not as well minimized as in
the case of GD. Often in most cases, the close
approximation that you get in SGD for the parameter
values are enough because they reach the optimal
values and keep oscillating there.
There are several different flavors of SGD, which can
be all seen throughout literature. Let's take a look at
the three most common variants:
A)
• randomly shuffle samples in the training set
• for one or more epochs, or until approx. cost
minimum is reached
• for training sample i
• compute gradients and perform weight updates
B)
• for one or more epochs, or until approx. cost
minimum is reached
• randomly shuffle samples in the training set
• for training sample i
• compute gradients and perform weight updates
C)
• for iterations t, or until approx. cost minimum is
reached:
• draw random sample from the training set
• compute gradients and perform weight updates
In scenario A , we shuffle the training set only one
time in the beginning; whereas in scenario B, we
shuffle the training set after each epoch to prevent
repeating update cycles. In both scenario A and
scenario B, each training sample is only used once per
epoch to update the model weights.
In scenario C, we draw the training samples randomly
with replacement from the training set. If the number
of iterations t is equal to the number of training
samples, we learn the model based on a bootstrap
sample of the training set.
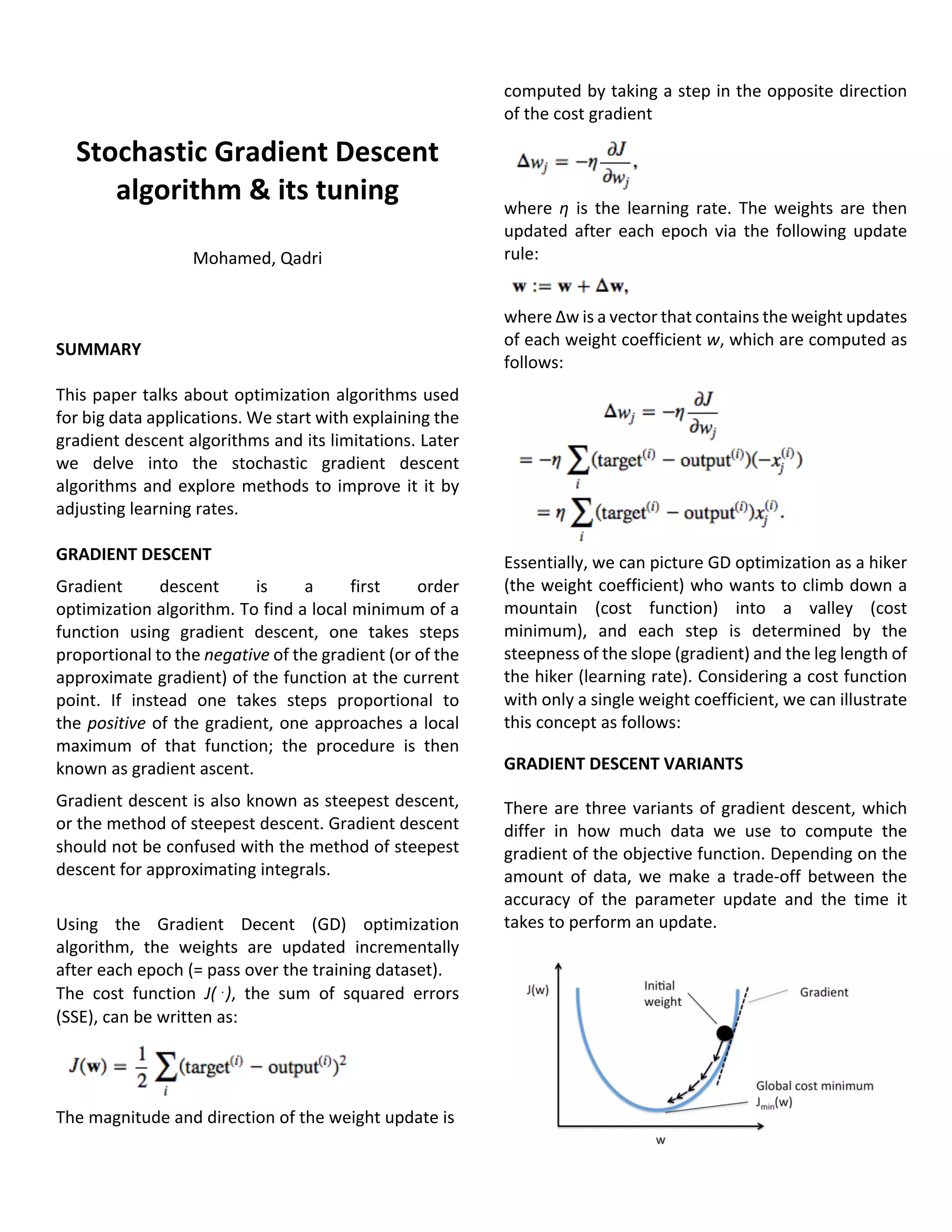
In the Gradient Descent method, one computes the
direction that decreases the objective function the
most in the case of minimization problems. But
sometimes this cant be quite costly. In most Machine
Learning for example, the objective function is often
the cumulative sum of the error over the training
examples. But the size of the training examples set
might be very large and hence computing the actual
gradient would be computationally expensive.
In Stochastic Gradient (Descent) method, we
compute an estimate or approximation to this
direction. The most simple way is to just look at one
training example (or subset of training examples) and
compute the direction to move only on this
approximation. It is called as Stochastic because the
approximate direction that is computed at every step
can be thought of a random variable of a stochastic
process. This is mainly used in showing the
convergence of this algorithm.
Recent theoretical results, however, show that the
runtime to get some desired optimization accuracy
does not increase as the training set size increases.
Stochastic Gradient Descent is sensitive to feature
scaling, so it is highly recommended to scale your
data. For example, scale each attribute on the input
vector X to [0,1] or [-1,+1], or standardize it to have
mean 0 and variance 1. Note that the same scaling
must be applied to the test vector to obtain
meaningful results.
Empirically, we found that SGD converges after
observing approx. 10^6 training samples. Thus, a
reasonable first guess for the number of iterations
is n_iter = np.ceil(10**6 / n), where n is the size of the
training set.
If you apply SGD to features extracted using PCA we
found that it is often wise to scale the feature values
by some constant c such that the average L2 norm of
the training data equals one.
We found that Averaged SGD works best with a larger
number of features and a higher eta0
Here, the term "stochastic" comes from the fact that
the gradient based on a single training sample is a
"stochastic approximation" of the "true" cost](https://image.slidesharecdn.com/termpaperpdf-160410015631/75/Stochastic-gradient-descent-and-its-tuning-3-2048.jpg)
![learning rate to shrink and eventually become
infinitesimally small, at which point the algorithm is
no longer able to acquire additional knowledge. The
following algorithms aim to resolve this flaw.
Adadelta
Adadelta is an extension of Adagrad that seeks to
reduce its aggressive, monotonically decreasing
learning rate. Instead of accumulating all past
squared gradients, Adadelta restricts the window of
accumulated past gradients to some fixed size w.
Instead of inefficiently storing w previous squared
gradients, the sum of gradients is recursively defined
as a decaying average of all past squared gradients.
The running average E[g2
]t at time step t then
depends (as a fraction γ similarly to the Momentum
term) only on the previous average and the current
gradient.
RMSprop
RMSprop is an unpublished, adaptive learning rate
method proposed by Geoff Hinton
RMSprop and Adadelta have both been developed
independently around the same time stemming from
the need to resolve Adagrad's radically diminishing
learning rates. RMSprop in fact is identical to the first
update vector of Adadelta that we derived above:
RMSprop as well divides the learning rate by an
exponentially decaying average of squared gradients.
Hinton suggests γ to be set to 0.9, while a good
default value for the learning rate η is 0.001.
Adam
Adaptive Moment Estimation (Adam) is another
method that computes adaptive learning rates for
each parameter. In addition to storing an
exponentially decaying average of past squared
gradients vt like Adadelta and RMSprop, Adam also
keeps an exponentially decaying average of past
gradients mt, similar to momentum:
mt=β1mt−1+(1−β1)gt
vt=β2vt−1+(1−β2)g2t
mt and vt are estimates of the first moment (the
mean) and the second moment (the uncentered
variance) of the gradients respectively, hence the
name of the method. As mt and vt are initialized as
vectors of 0's, the authors of Adam observe that they
are biased towards zero, especially during the initial
time steps, and especially when the decay rates are
small (i.e. β1 and β2 are close to 1).
ADDITIONAL STRATEGIES FOR OPTIMIZING SGD
Finally, we introduce additional strategies that can be
used alongside any of the previously mentioned
algorithms to further improve the performance of
SGD.
Shuffling And Curriculum Learning
Generally, we want to avoid providing the training
examples in a meaningful order to our model as this
may bias the optimization algorithm. Consequently, it
is often a good idea to shuffle the training data after
every epoch.
On the other hand, for some cases where we aim to
solve progressively harder problems, supplying the
training examples in a meaningful order may actually
lead to improved performance and better
convergence. The method for establishing this
meaningful order is called Curriculum Learning.
Batch Normalization
To facilitate learning, we typically normalize the initial
values of our parameters by initializing them with
zero mean and unit variance. As training progresses
and we update parameters to different extents, we
lose this normalization, which slows down training
and amplifies changes as the network becomes
deeper.
Batch normalization reestablishes these
normalizations for every mini-batch and changes are
back-propagated through the operation as well. By
making normalization part of the model architecture,](https://image.slidesharecdn.com/termpaperpdf-160410015631/75/Stochastic-gradient-descent-and-its-tuning-6-2048.jpg)
![Conclusion
In conclusion we saw that to manage large scale
data we can use variants of gradient descent, batch
gradient descent, stochastic gradient descent (SGD),
and mini gradient descent in the order of
improvement over the previous one. Each of which
differs in how much data we use to compute the
gradient of the objective function. Given the
ubiquity of large-scale data solutions and the
availability of low-commodity clusters, distributing
SGD to speed it up further is an obvious choice. SGD
by itself is inherently sequential: Step-by-step, we
progress further towards the minimum. Running it
provides good convergence but can be slow
particularly on large datasets. In contrast, running
SGD asynchronously is faster, but suboptimal
communication between workers can lead to poor
convergence. Additionally, we can also parallelize
SGD on one machine without the need for a large
computing cluster.
Depending on the amount of data, we make a trade-
off between the accuracy of the parameter update
and the time it takes to perform an update. To
overcome this challenge of parameter update using
the learning rate we looked at various methods that
address this problem such as momentum, Nesterov
Accelerated gradient, Adagrad, Adadelta, RMSProp
and Adam. In summary, RMSprop is an extension of
Adagrad that deals with its radically diminishing
learning rates. It is identical to Adadelta, except that
Adadelta uses the RMS of parameter updates in the
numinator update rule. Adam, finally, adds bias-
correction and momentum to RMSprop. Insofar,
RMSprop, Adadelta, and Adam are very similar
algorithms that do well in similar circumstances. Its
bias-correction helps Adam slightly outperform
RMSprop towards the end of optimization as
gradients become sparser. Insofar, Adam might be
the best overall choice.
Interestingly, many recent papers use vanilla SGD
without momentum and a simple learning rate
annealing schedule. As has been shown, SGD usually
achieves to find a minimum, but it might take
significantly longer than with some of the
optimizers, is much more reliant on a robust
initialization and annealing schedule, and may get
stuck in saddle points rather than local minima.
Consequently, if you care about fast convergence
and train a deep or complex neural network, you
should choose one of the adaptive learning rate
methods.
References
[1]Bottou, Léon (1998). "Online Algorithms and
Stochastic Approximations".
[2]Bottou, Léon. "Large-scale machine learning
with SGD."
[3]Bottou, Léon. "SGD tricks." Neural Networks:
Tricks of the Trade.
[4]https://www.quora.com/Whats-the-difference-
between-gradient-descent-and-stochastic-gradient-
descent
[5]http://ufldl.stanford.edu/tutorial/supervised/Op
timizationStochasticGradientDescent/
[6]http://scikit-learn.org/stable/modules/sgd.html
[7]http://sebastianruder.com/optimizing-gradient-
descent/](https://image.slidesharecdn.com/termpaperpdf-160410015631/75/Stochastic-gradient-descent-and-its-tuning-8-2048.jpg)

The document discusses various optimization algorithms, focusing on gradient descent and its stochastic variant, stochastic gradient descent (SGD), especially in the context of big data applications. It explains the differences between batch gradient descent, SGD, and mini-batch gradient descent, highlighting trade-offs in accuracy and speed, as well as convergence behaviors for optimizing objective functions. Additionally, it explores advanced techniques for improving training effectiveness, such as momentum, Nesterov accelerated gradient, Adagrad, and Adam, each addressing specific challenges associated with gradient-based optimization.