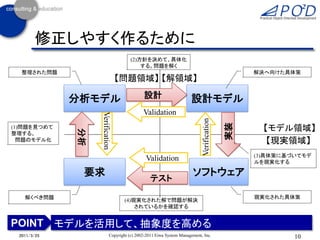
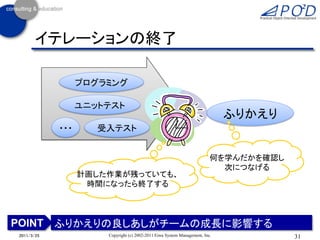
納品後のソフトウェアの機能の利用度
Sometimes Rarely
16% 19%
ほとんど
ときどき利用する 余分な機能のムダ
利用しない
よく利用する
Often いつも 全く利用しない
13% 利用する
Always
7% Never
45%
Standish Group Study Reported in 2000 Chaos Report.
POINT 利用される機能は全体の1/3、良く利用されるのは1/5
2011/3/25 Copyright (c) 2002-2011 Eiwa System Management, Inc. 13
14.
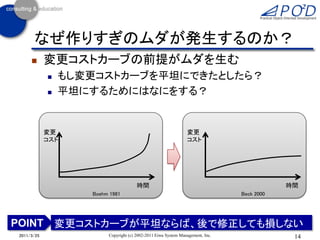
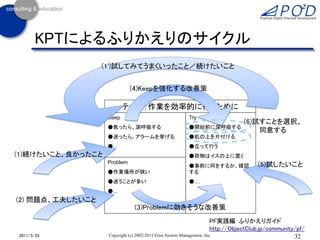
なぜ作りすぎのムダが発生するのか?
変更コストカーブの前提がムダを生む
もし変更コストカーブを平坦にできたとしたら?
平坦にするためにはなにをする?
変更 変更
コスト コスト
時間 時間
Boehm 1981 Beck 2000
POINT 変更コストカーブが平坦ならば、後で修正しても損しない
2011/3/25 Copyright (c) 2002-2011 Eiwa System Management, Inc. 14
15.
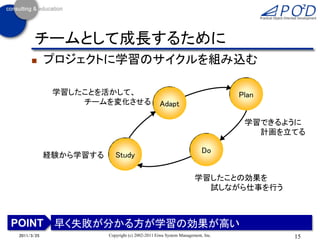
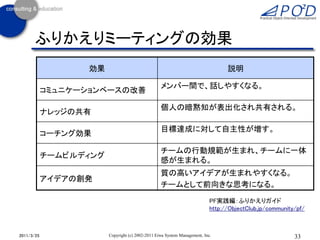
チームとして成長するために
プロジェクトに学習のサイクルを組み込む
学習したことを活かして、 Plan
チームを変化させる Adapt
学習できるように
計画を立てる
Do
経験から学習する Study
学習したことの効果を
試しながら仕事を行う
POINT 早く失敗が分かる方が学習の効果が高い
2011/3/25 Copyright (c) 2002-2011 Eiwa System Management, Inc. 15
16.
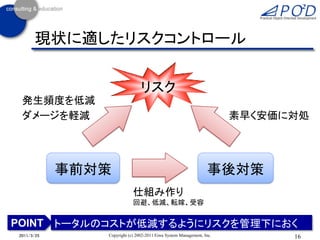
現状に適したリスクコントロール
リスク
発生頻度を低減
ダメージを軽減 素早く安価に対処
事前対策 事後対策
仕組み作り
回避、低減、転嫁、受容
POINT トータルのコストが低減するようにリスクを管理下におく
2011/3/25 Copyright (c) 2002-2011 Eiwa System Management, Inc. 16
17.
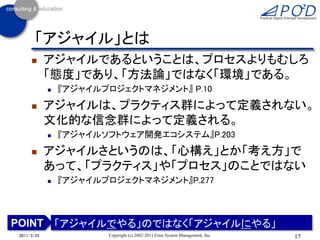
「アジャイル」とは
アジャイルであるということは、プロセスよりもむしろ
「態度」であり、「方法論」ではなく「環境」である。
『アジャイルプロジェクトマネジメント』 P.10
アジャイルは、プラクティス群によって定義されない。
文化的な信念群によって定義される。
『アジャイルソフトウェア開発エコシステム』P.203
アジャイルさというのは、「心構え」とか「考え方」で
あって、「プラクティス」や「プロセス」のことではない
『アジャイルプロジェクトマネジメント』P.277
POINT 「アジャイルでやる」のではなく「アジャイルにやる」
2011/3/25 Copyright (c) 2002-2011 Eiwa System Management, Inc. 17
アジャイルソフトウェア開発宣言
軽量級と呼ばれていたソフト
ウェア開発手法の提唱者に
より、各手法の共通点をまと
めたもの
(2001年2月)
http://agilemanifesto.org/iso/ja/
2011/3/25 Copyright (c) 2002-2011 Eiwa System Management, Inc. 21
22.
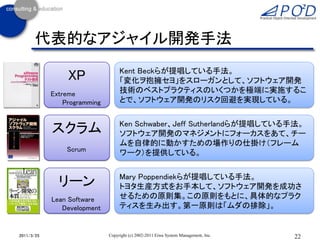
代表的なアジャイル開発手法
Kent Beckらが提唱している手法。
XP 「変化ヲ抱擁セヨ」をスローガンとして、ソフトウェア開発
Extreme 技術のベストプラクティスのいくつかを極端に実施するこ
Programming とで、ソフトウェア開発のリスク回避を実現している。
Ken Schwaber、Jeff Sutherlandらが提唱している手法。
スクラム ソフトウェア開発のマネジメントにフォーカスをあて、チー
ムを自律的に動かすための場作りの仕掛け(フレーム
Scrum
ワーク)を提供している。
Mary Poppendiekらが提唱している手法。
リーン トヨタ生産方式をお手本して、ソフトウェア開発を成功さ
Lean Software せるための原則集。この原則をもとに、具体的なプラク
Development ティスを生み出す。第一原則は「ムダの排除」。
2011/3/25 Copyright (c) 2002-2011 Eiwa System Management, Inc. 22
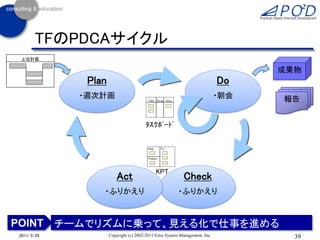
TFのPDCAサイクル
上位計画
成果物
Plan Do
・週次計画 ToDo Doing Done
Done
・朝会 報告
タスクボード
Keep Try
Done
Problem
KPT
Act Check
・ふりかえり ・ふりかえり
POINT チームでリズムに乗って、見える化で仕事を進める
2011/3/25 Copyright (c) 2002-2011 Eiwa System Management, Inc. 39
40.
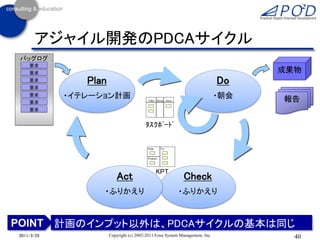
アジャイル開発のPDCAサイクル
バッグログ
要求
要求 成果物
要求 Plan Do
要求
要求 ・イテレーション計画 ToDo Doing Done
Done
・朝会 報告
要求
要求
タスクボード
Keep Try
Done
Problem
KPT
Act Check
・ふりかえり ・ふりかえり
POINT 計画のインプット以外は、PDCAサイクルの基本は同じ
2011/3/25 Copyright (c) 2002-2011 Eiwa System Management, Inc. 40

















































![[RSGT2017] つらい問題に出会ったら](https://cdn.slidesharecdn.com/ss_thumbnails/whenyoumetpainfulproblem-170114024920-thumbnail.jpg?width=640&height=640&fit=bounds)













![[ESM_CM セミナー]小さく作って大いに役立つスマートフォンアプリ(CYCLONE)公開用](https://cdn.slidesharecdn.com/ss_thumbnails/withesmsmartphoneapplicationandcyclonecodename1000-111207215903-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)


























