Downloaded 30 times

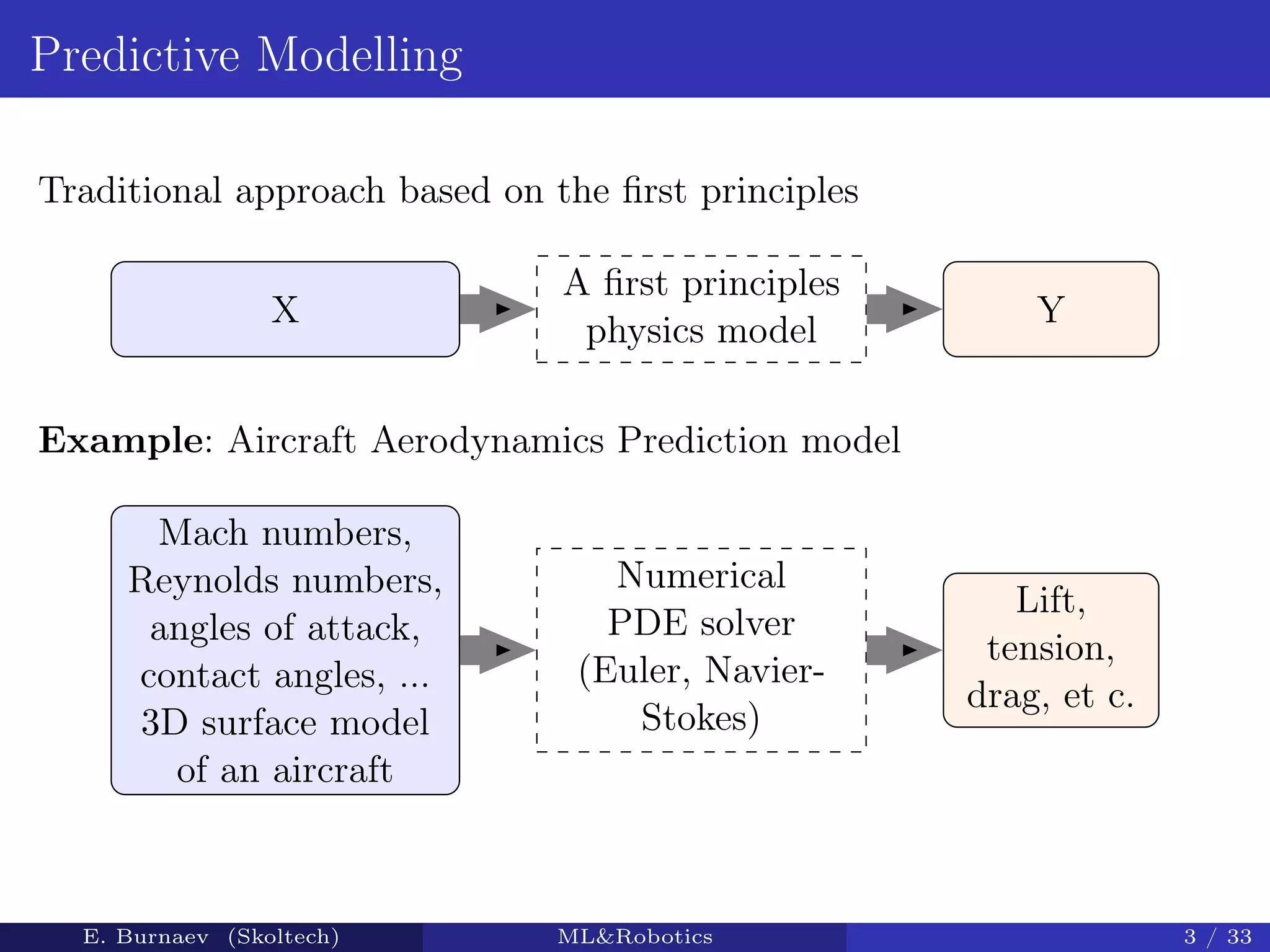
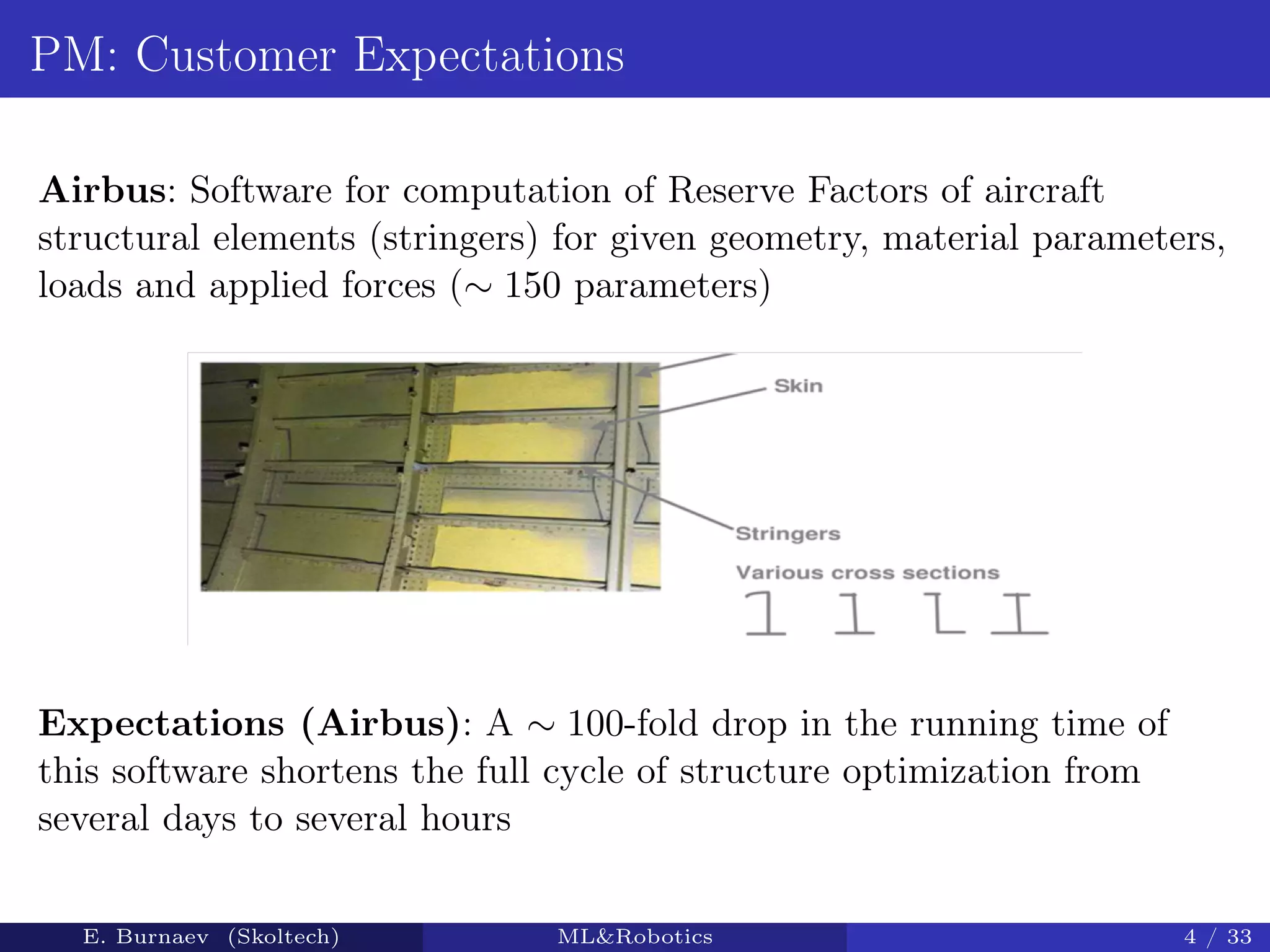
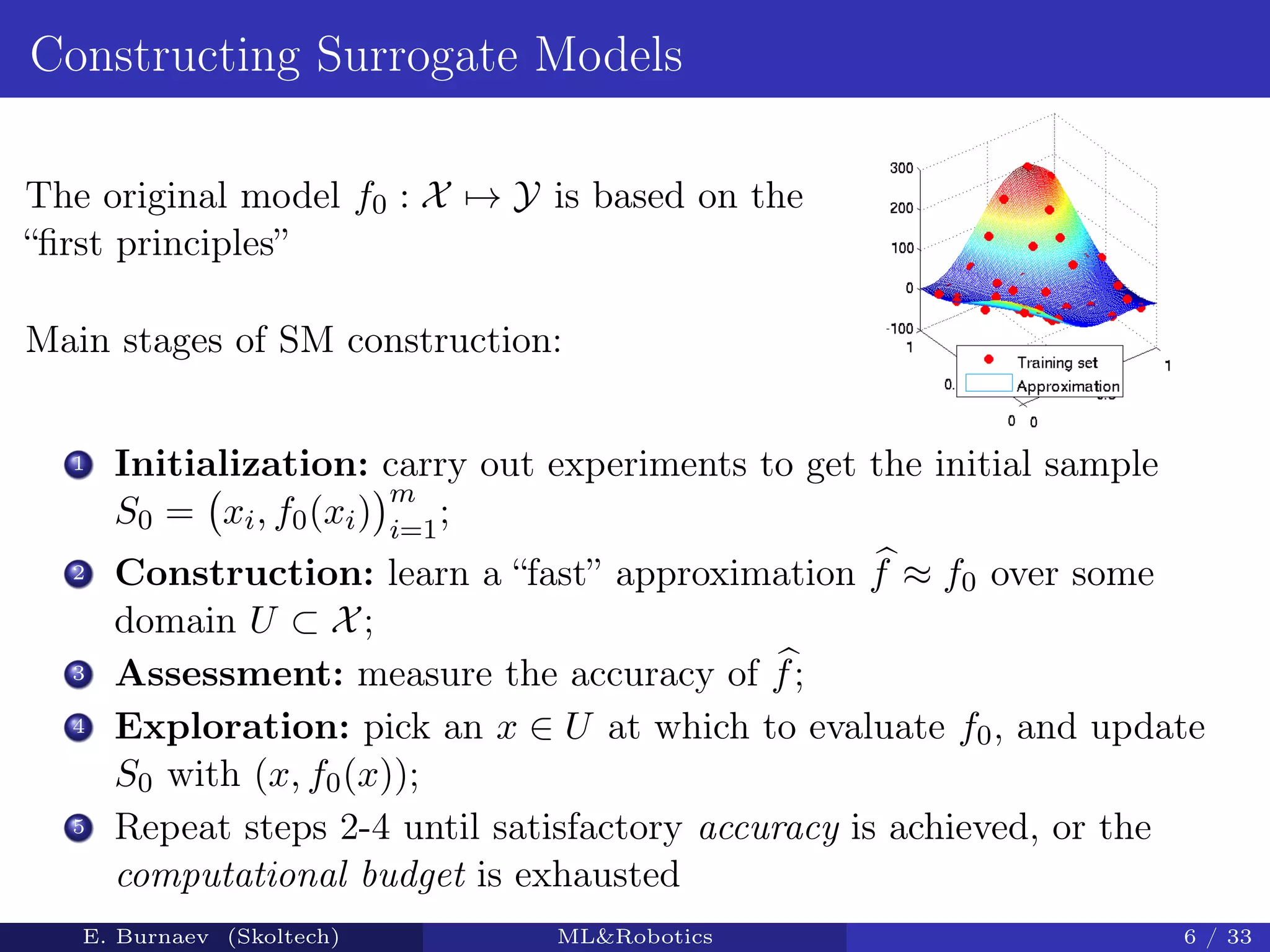
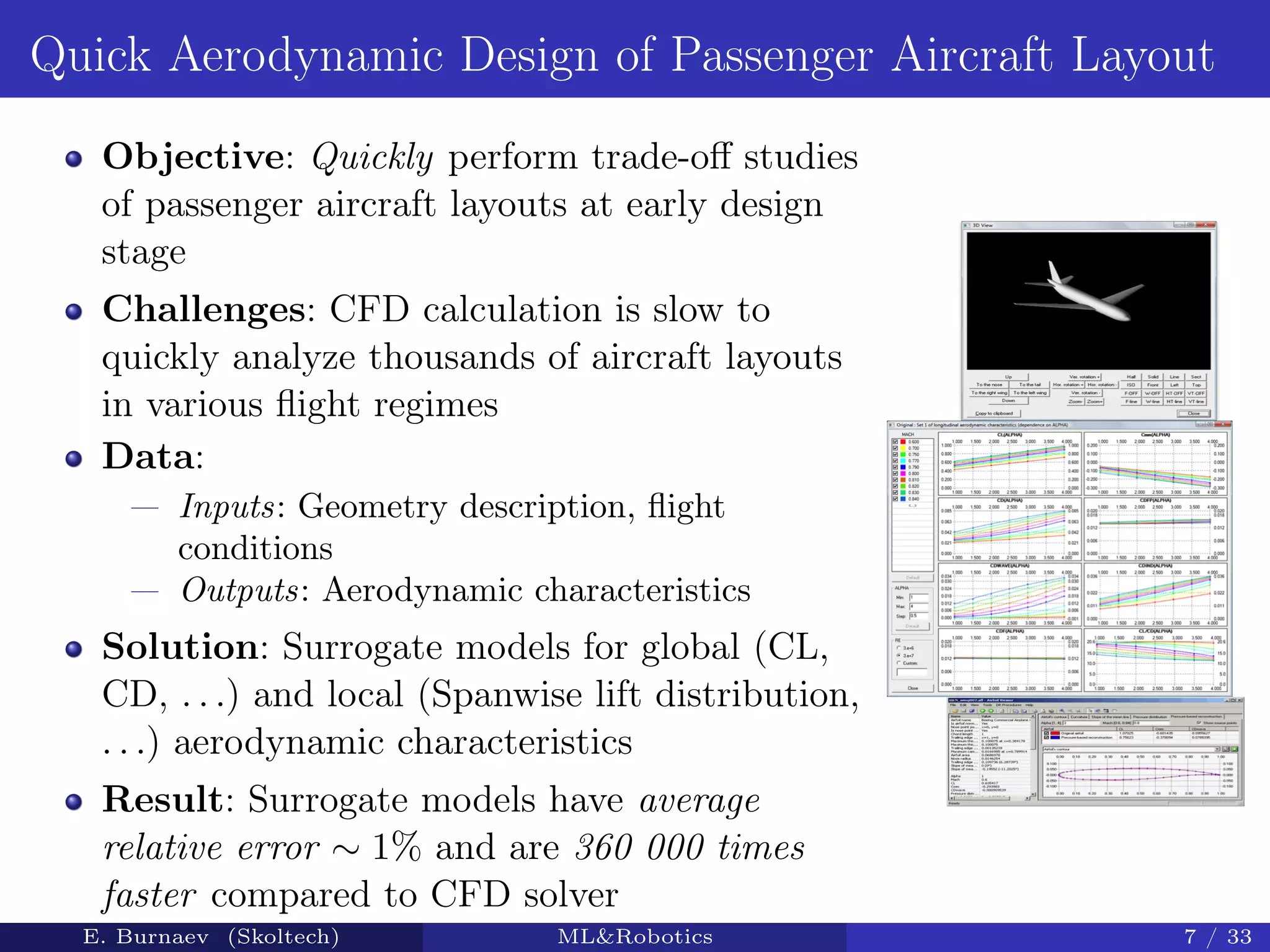
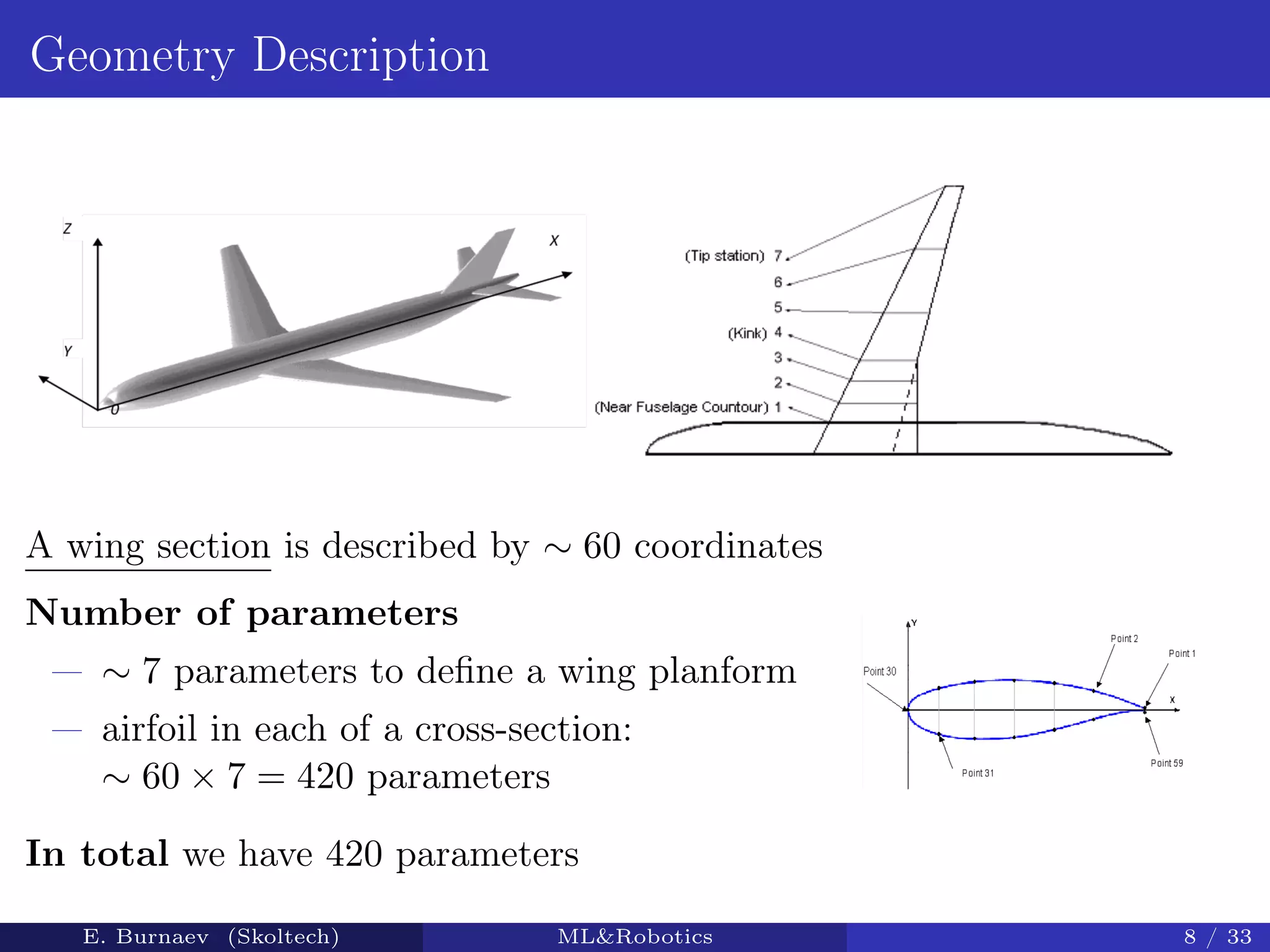
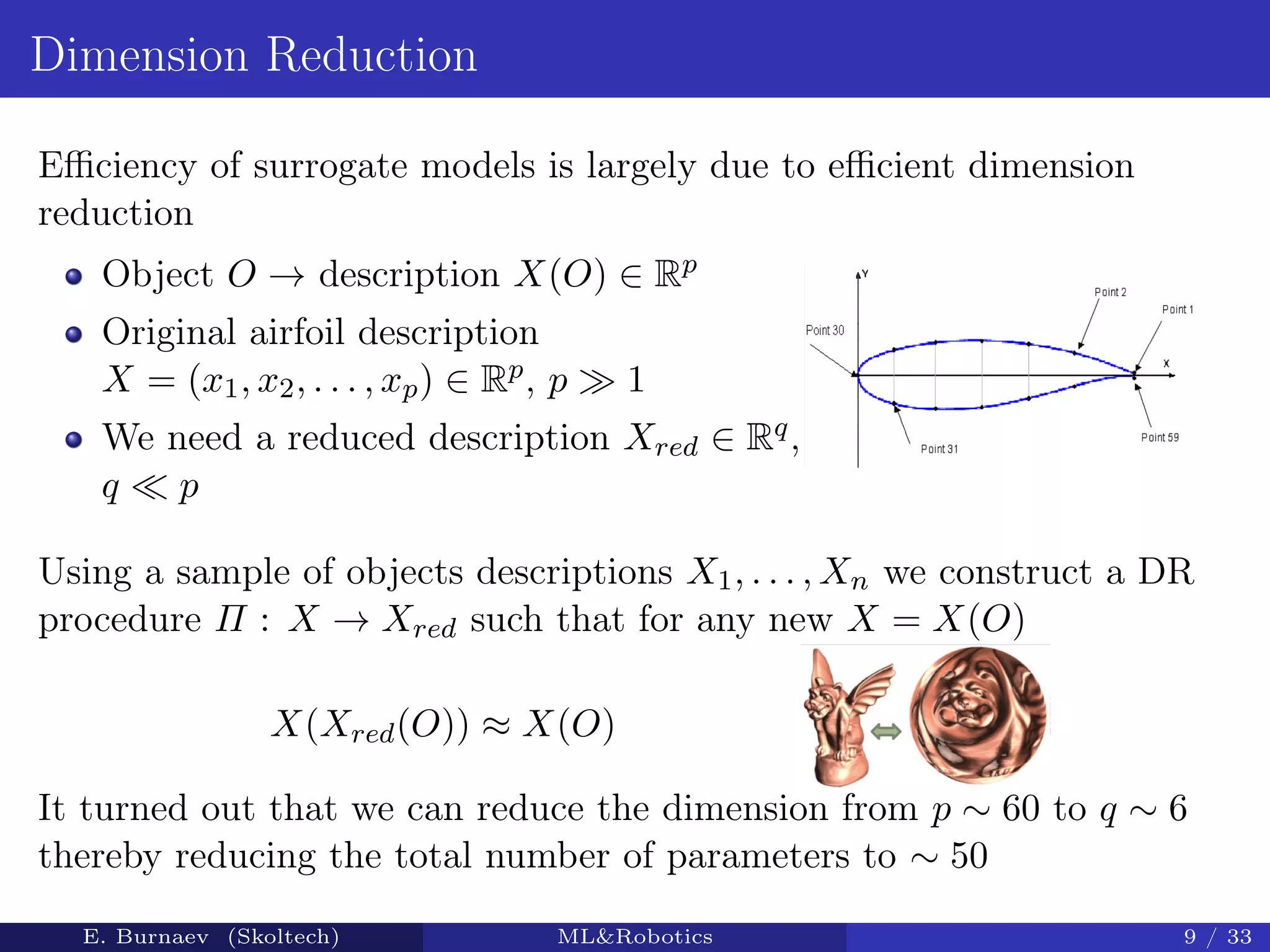
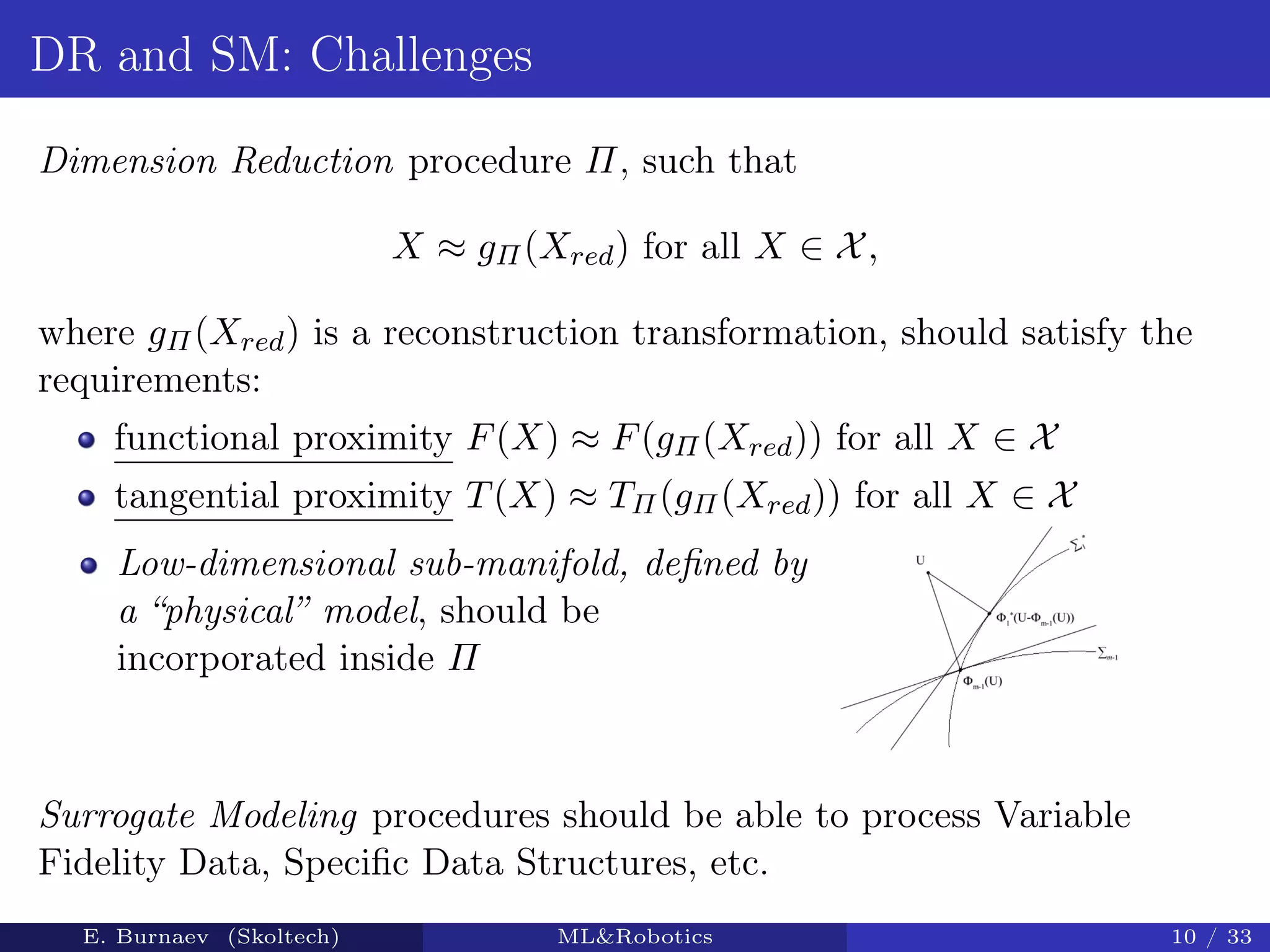
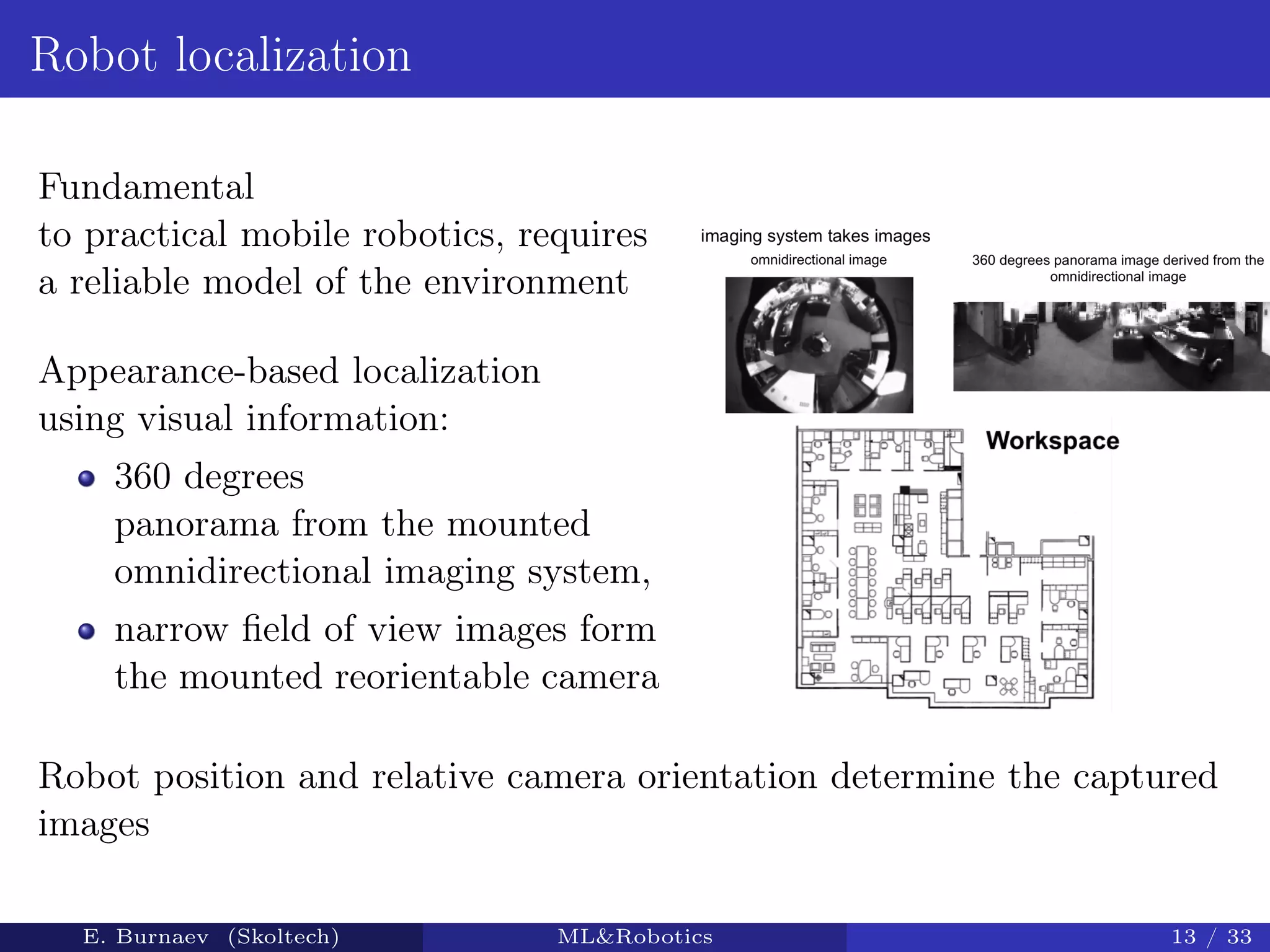




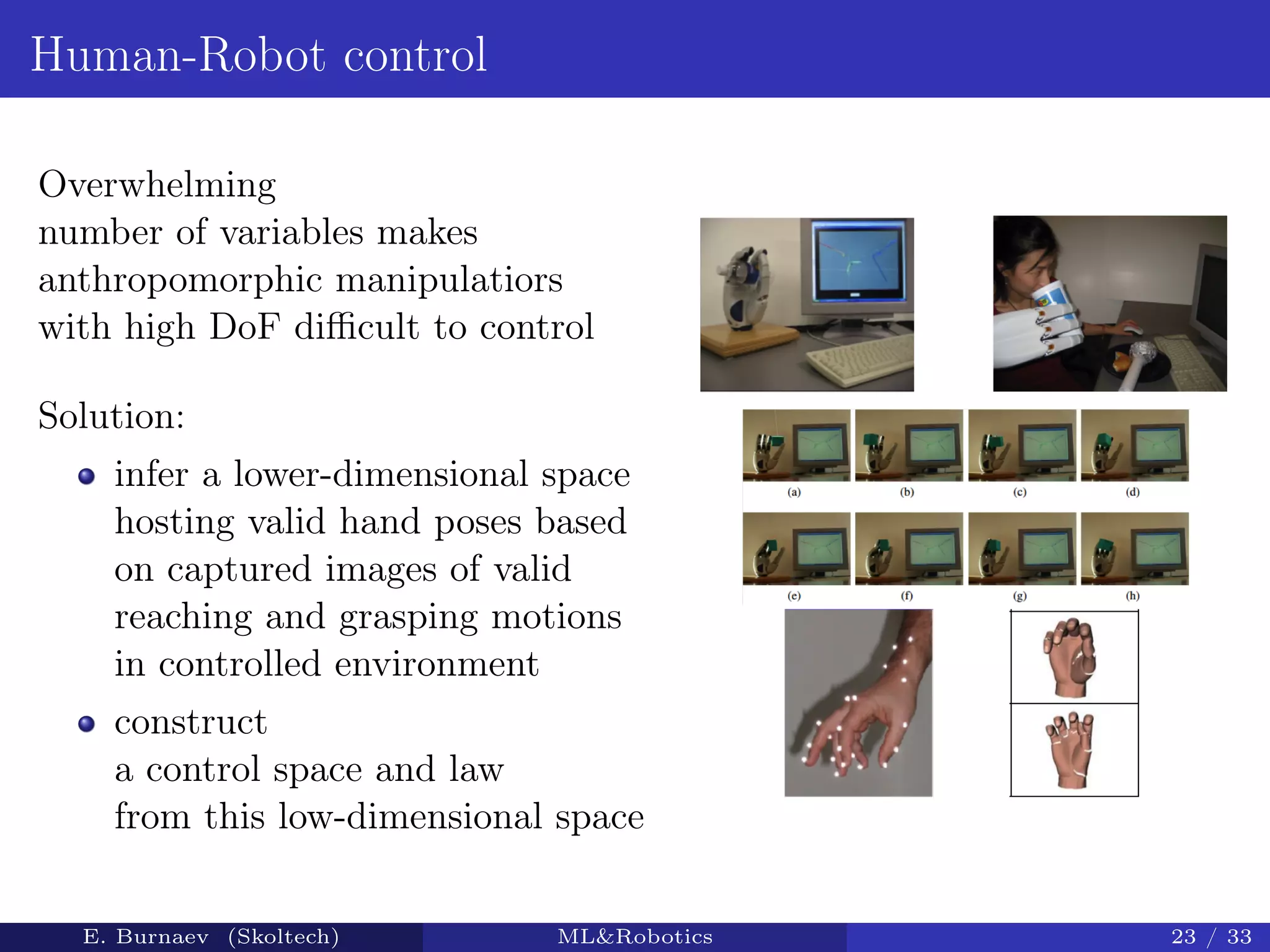
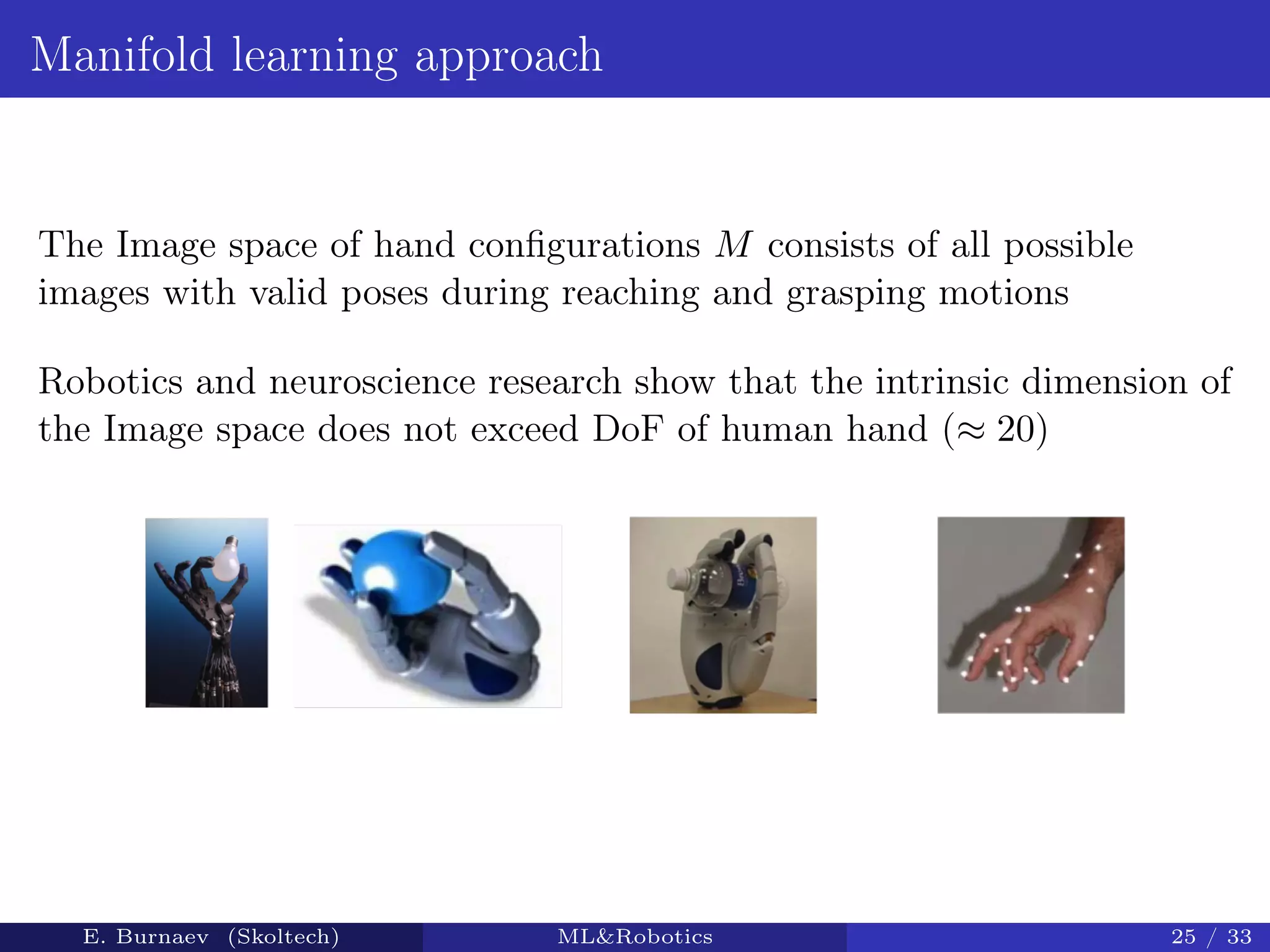
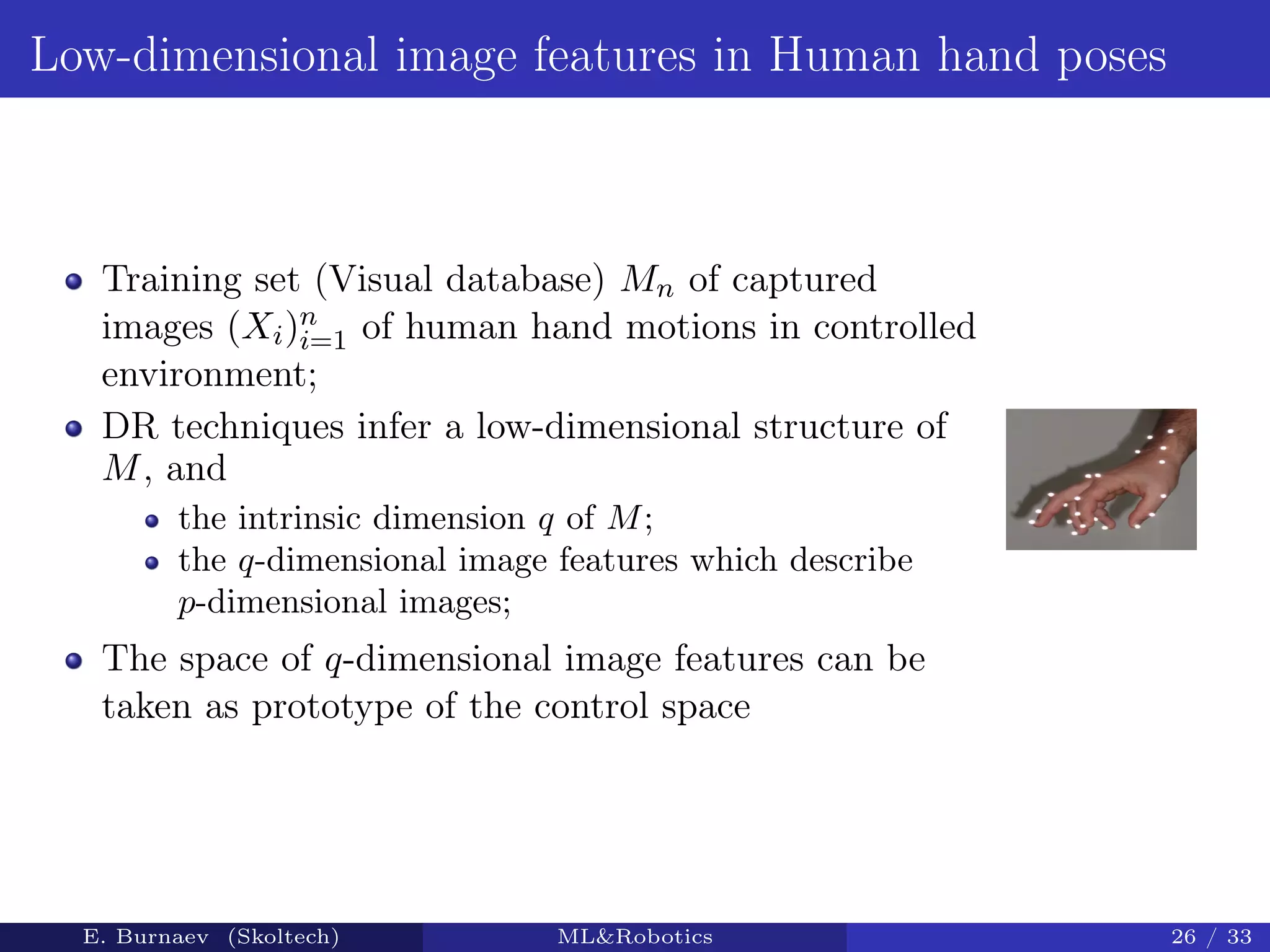
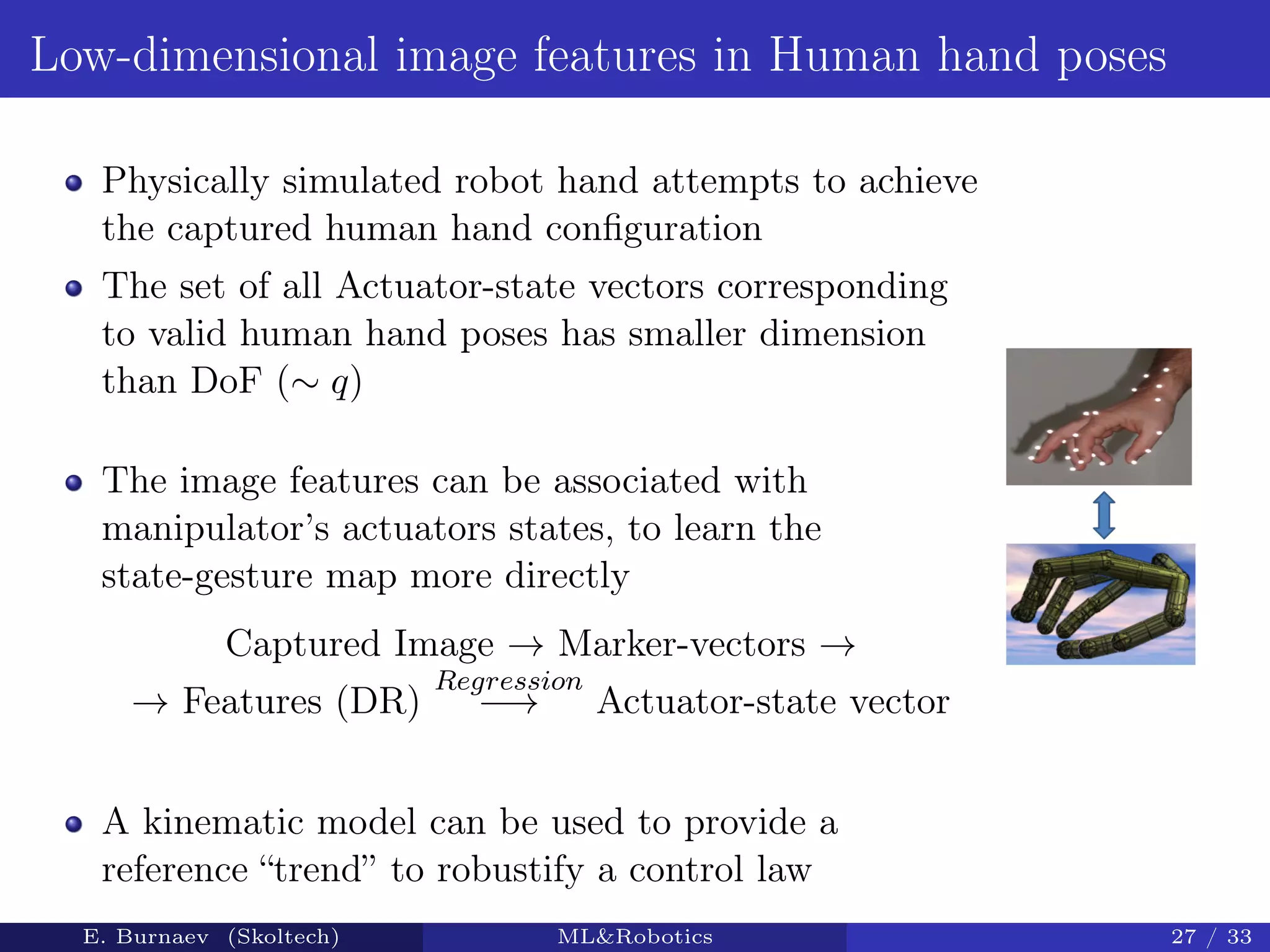

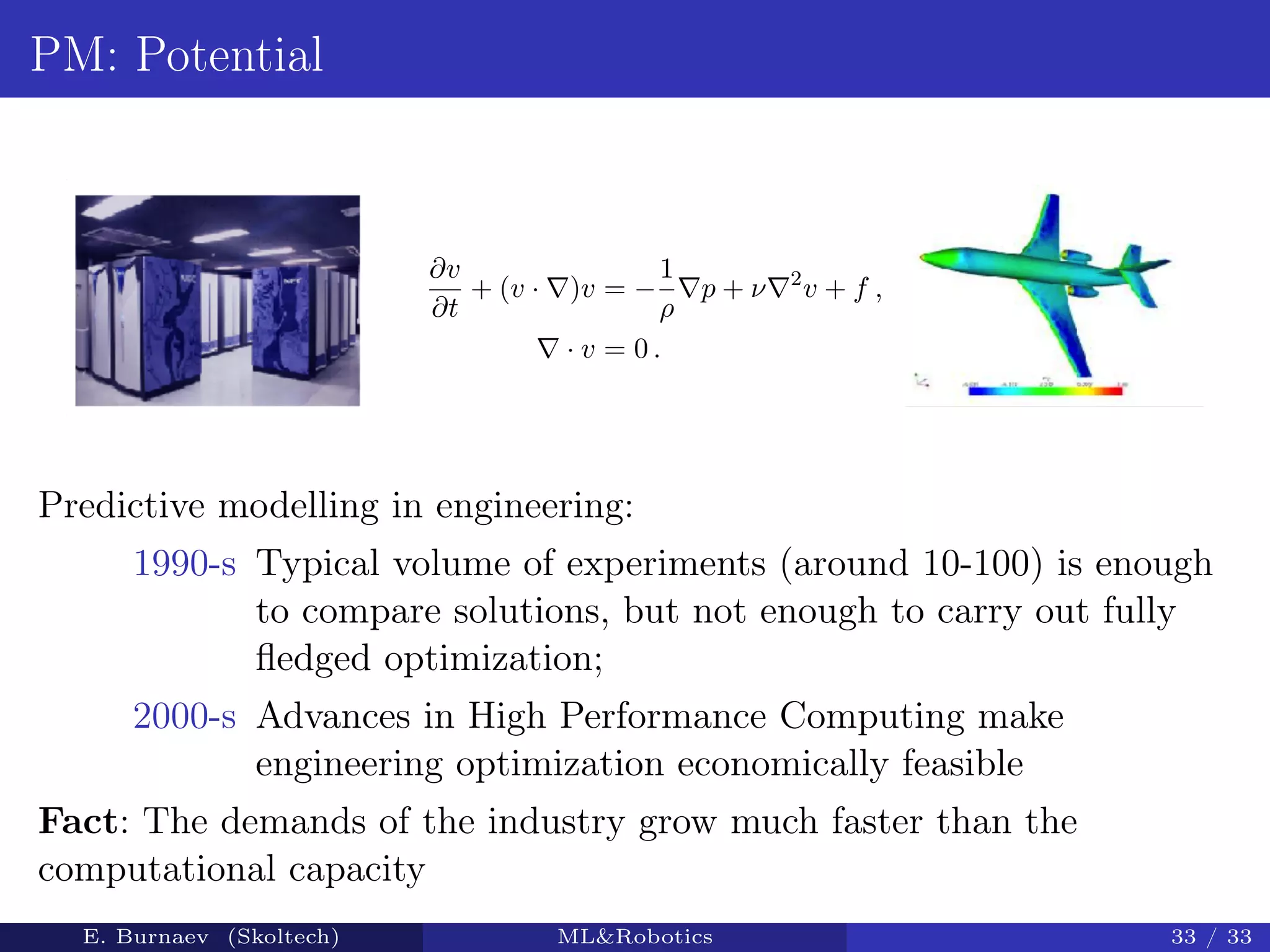

The document discusses applications of machine learning for robot navigation and control. It describes how surrogate models can be used for predictive modeling in engineering applications like aircraft design. Dimension reduction techniques are used to reduce high-dimensional design parameters to a lower-dimensional space for faster surrogate model evaluation. For robot navigation, regression models on image manifolds are used for visual localization by mapping images to robot positions. Manifold learning is also applied to find low-dimensional representations of valid human hand poses from images to enable easier robot control.





























































![[Skolkovo Robotics V] Assistive Market: HERCULE Project](https://cdn.slidesharecdn.com/ss_thumbnails/15-170422180713-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Skolkovo Robotics V] Robotics in Korea](https://cdn.slidesharecdn.com/ss_thumbnails/roboticsinkorea-170422182747-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Skolkovo Robotics V] Collaborative Robots: Research, Technologies and Applic...](https://cdn.slidesharecdn.com/ss_thumbnails/3-170422180506-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Skolkovo Robotics V] Facial Expression Recognition in the Wild](https://cdn.slidesharecdn.com/ss_thumbnails/9xah210417-170506035908-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Skolkovo Robotics V] Overview of the Modern Robotics Market](https://cdn.slidesharecdn.com/ss_thumbnails/1-170422175713-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Skolkovo Robotics V] Боевые роботы: угрозы учтенные или непредвиденные](https://cdn.slidesharecdn.com/ss_thumbnails/18-170506035500-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Skolkovo Robotics V] Анализ задач и решений модульной, роевой и облачной роб...](https://cdn.slidesharecdn.com/ss_thumbnails/201716-9-170506040150-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Skolkovo Robotics V] Applying Anthropomorphic Robots Technology](https://cdn.slidesharecdn.com/ss_thumbnails/7-170422182428-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Skolkovo Robotics V] Перспективы и ограничения использования бас на немецком...](https://cdn.slidesharecdn.com/ss_thumbnails/random-170422185545-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Skolkovo Robotics V] Современное состояние и перспективы развития технологий...](https://cdn.slidesharecdn.com/ss_thumbnails/skolkovorobotics2017-170506040722-thumbnail.jpg?width=640&height=640&fit=bounds)


![[Skolkovo Robotics V] Autonomous driving: context and technical challenges of...](https://cdn.slidesharecdn.com/ss_thumbnails/presskolkovo-170506040400-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Skolkovo Robotics V] Race for AI: What do VCs expect from AI startups?](https://cdn.slidesharecdn.com/ss_thumbnails/skolkovoroboticsapril20171-170422184933-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Skolkovo Robotics V] Application of AI in Healthcare](https://cdn.slidesharecdn.com/ss_thumbnails/7aiinhealthcare-170506035725-thumbnail.jpg?width=640&height=640&fit=bounds)







![[BDD 2025 - Mobile Development] Crafting Immersive UI with E2E and AGSL Shade...](https://cdn.slidesharecdn.com/ss_thumbnails/md-craftingimmersiveuiwithe2eandagslshaderveronicaputrianggraini-251124030840-0c677f44-thumbnail.jpg?width=640&height=640&fit=bounds)

![[BDD 2025 - Full-Stack Development] PHP in AI Age: The Laravel Way. (Rizqy Hi...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-phpinaiagethelaravelway-251125012602-ef9d330e-thumbnail.jpg?width=640&height=640&fit=bounds)









![[BDD 2025 - Artificial Intelligence] AI for the Underdogs: Innovation for Sma...](https://cdn.slidesharecdn.com/ss_thumbnails/ai-aifortheunderdogsinnovationforsmallbusinesses-251124030839-72a599a4-thumbnail.jpg?width=640&height=640&fit=bounds)


