Downloaded 94 times
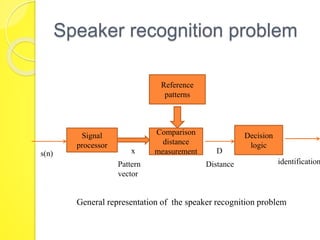
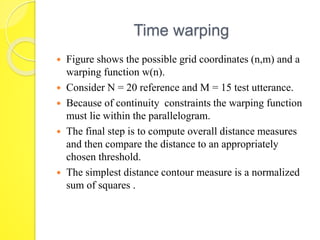
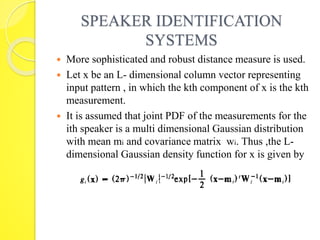
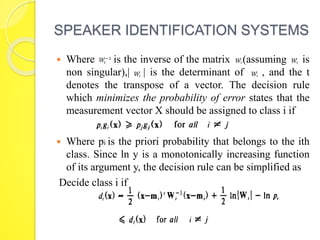
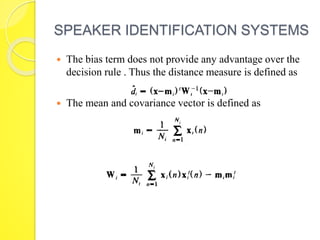
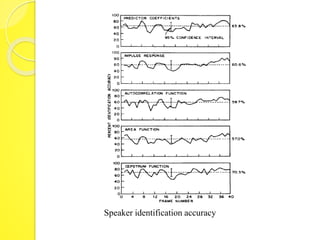
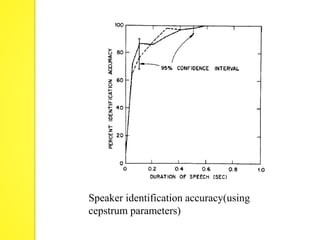

The document discusses speaker recognition systems, focusing on speaker verification and identification methods, which involve comparing speech patterns using digital processing techniques. It outlines the decision logic, error measurement processes, and the use of time warping to improve accuracy in matching speech patterns between claimed identities and stored references. The identification system requires multiple distance measurements and employs Gaussian distribution models to minimize error in assigning speaker identities.






























































![[Tobias herbig, franz_gerl]_self-learning_speaker_(book_zz.org)](https://cdn.slidesharecdn.com/ss_thumbnails/tobiasherbigfranzgerlself-learningspeakerbookzz-150520140217-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)





















