Downloaded 31 times
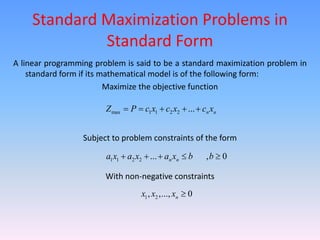
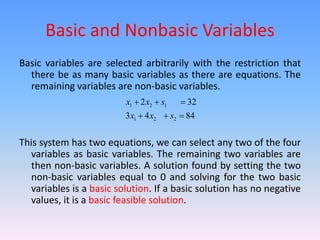

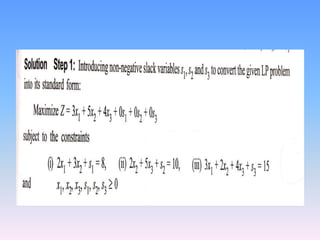
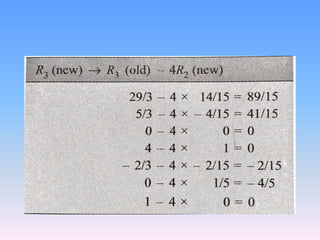
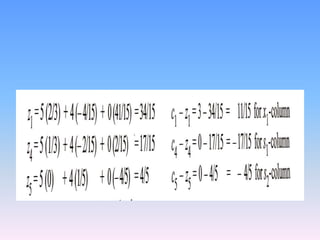
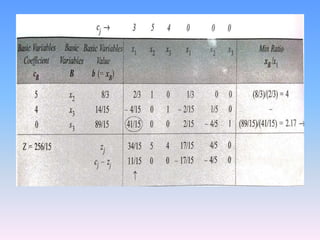
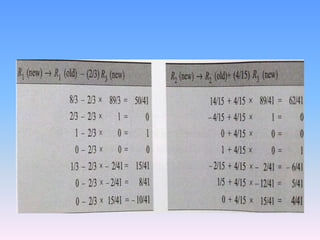
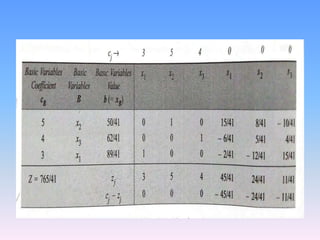

The document discusses the simplex method, an algebraic method for solving linear programming problems with more than two decision variables or constraints. It was developed by George Dantzig in 1947. The simplex method uses slack variables to represent unused resources and identifies basic and non-basic variables to iteratively find an optimal solution. It begins with an initial feasible solution and calculates values at each step to determine which variable should leave the basis and improve the objective function.