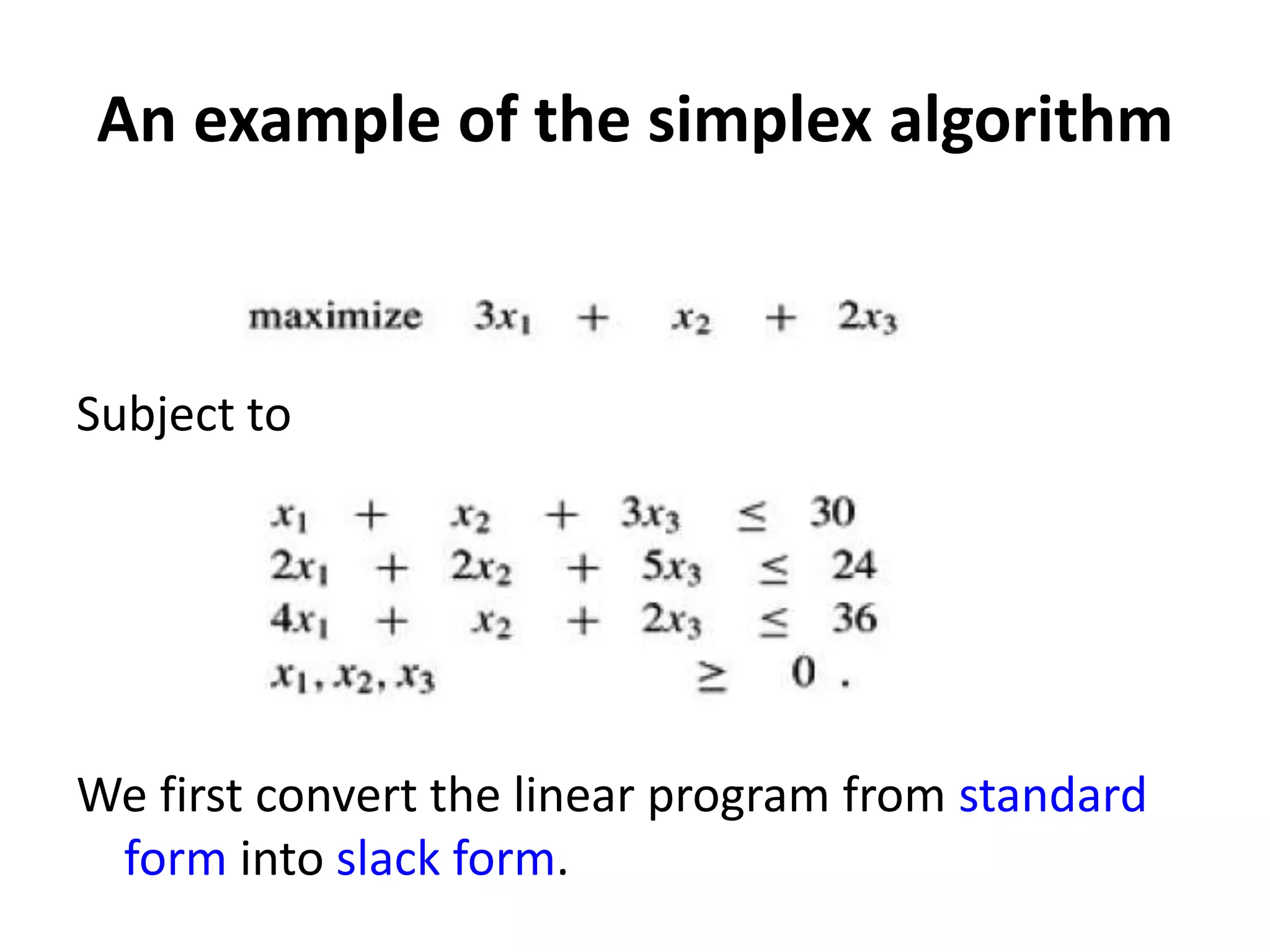
The document summarizes the simplex algorithm for solving linear programs. It describes how the algorithm works by starting with an initial basic feasible solution and iteratively arriving at solutions with greater objective values through pivoting. Pivoting exchanges a non-basic variable for a basic variable to obtain an equivalent linear program with a higher objective value. The algorithm terminates when all coefficients in the objective function are negative, indicating an optimal solution has been found.