
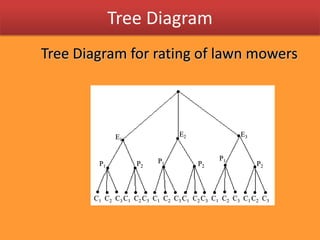

1) A sample space is the set of all possible outcomes of an experiment. Any subset of the sample space is called an event. 2) Events can be mutually exclusive, meaning they cannot occur simultaneously, or not mutually exclusive. 3) Venn diagrams can be used to depict relationships between events, such as intersections and unions. 4) Tree diagrams provide a systematic way to determine the size of a finite sample space when multiple variables are involved.






























































![Probability[1]](https://cdn.slidesharecdn.com/ss_thumbnails/probability1-110816105858-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)








































