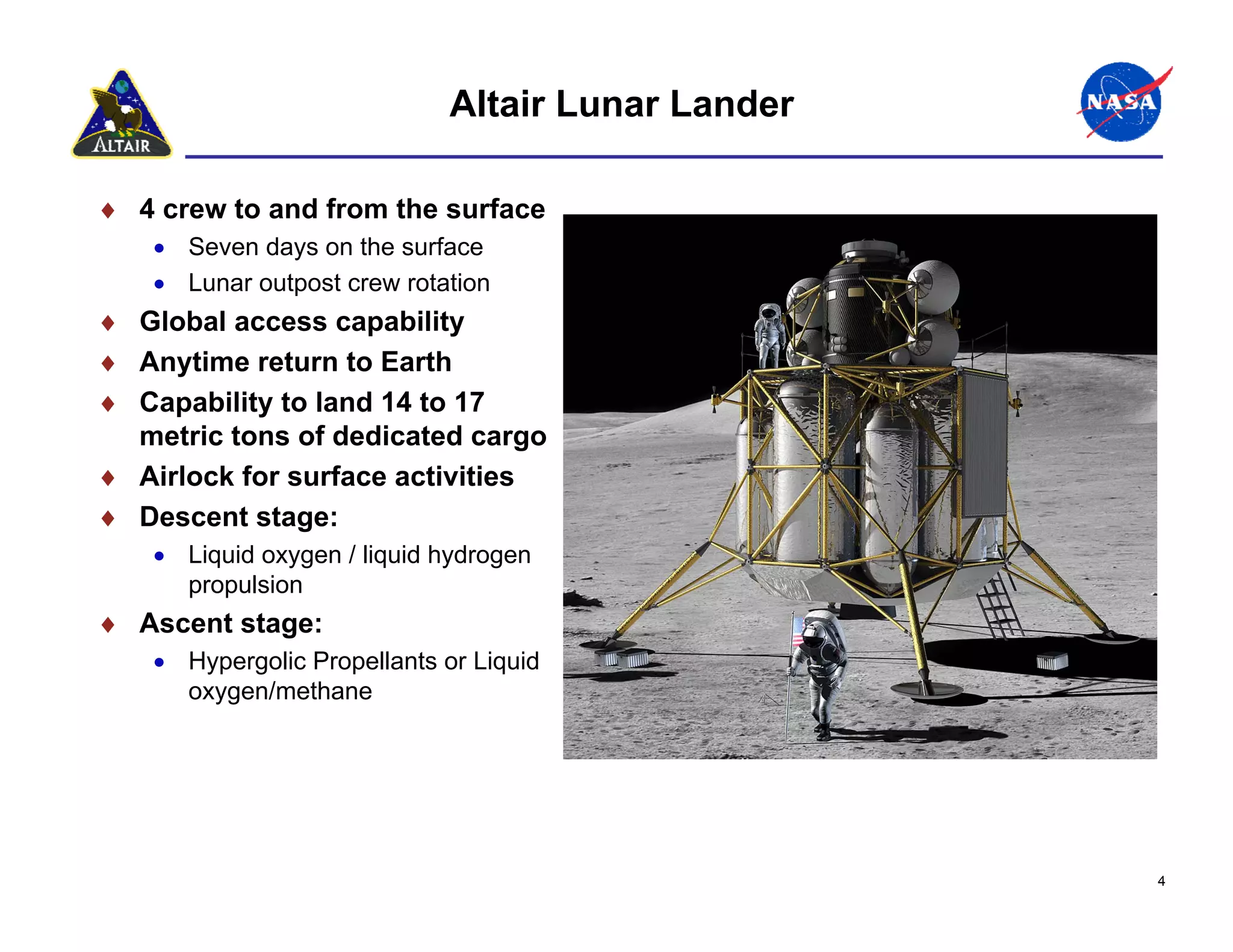
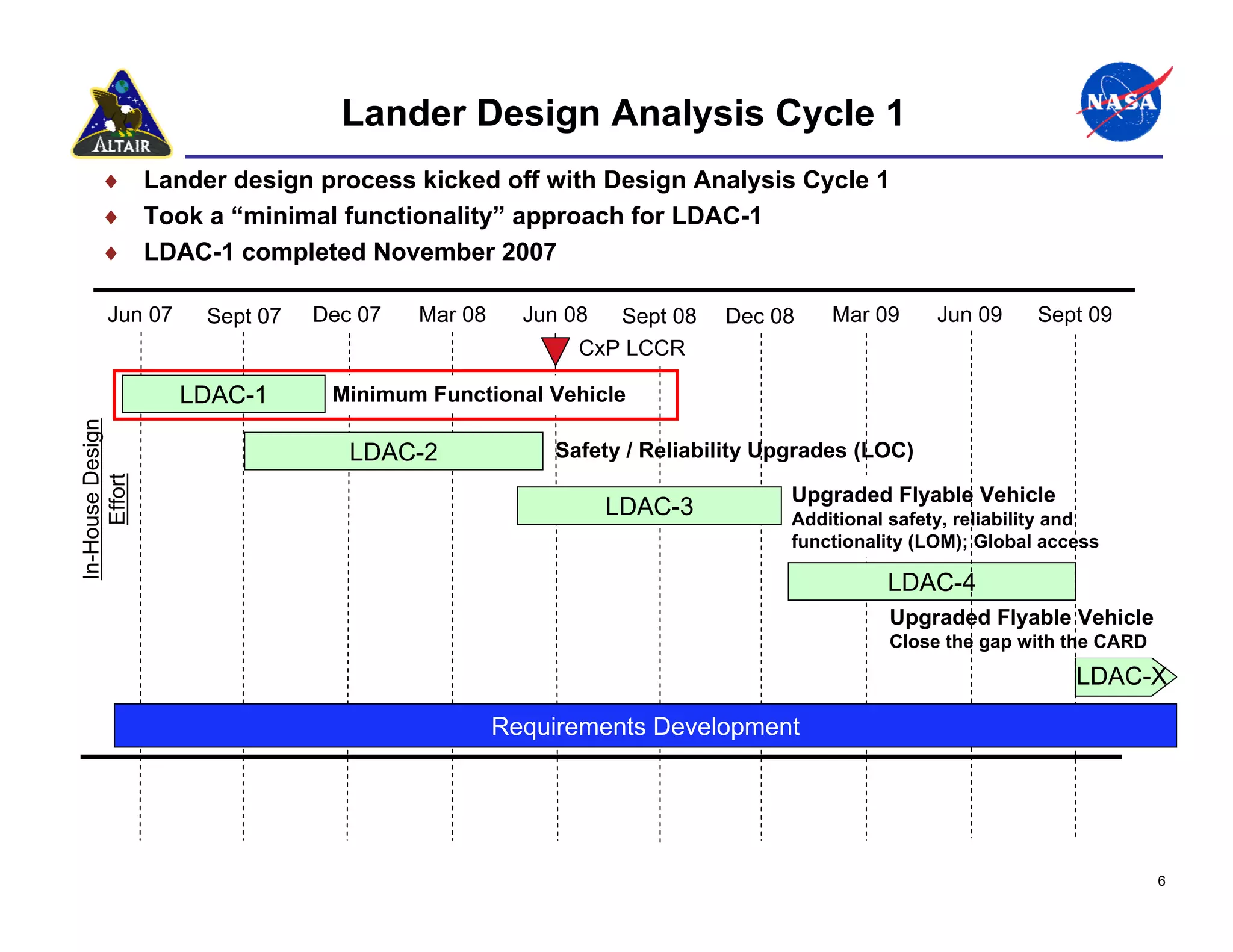
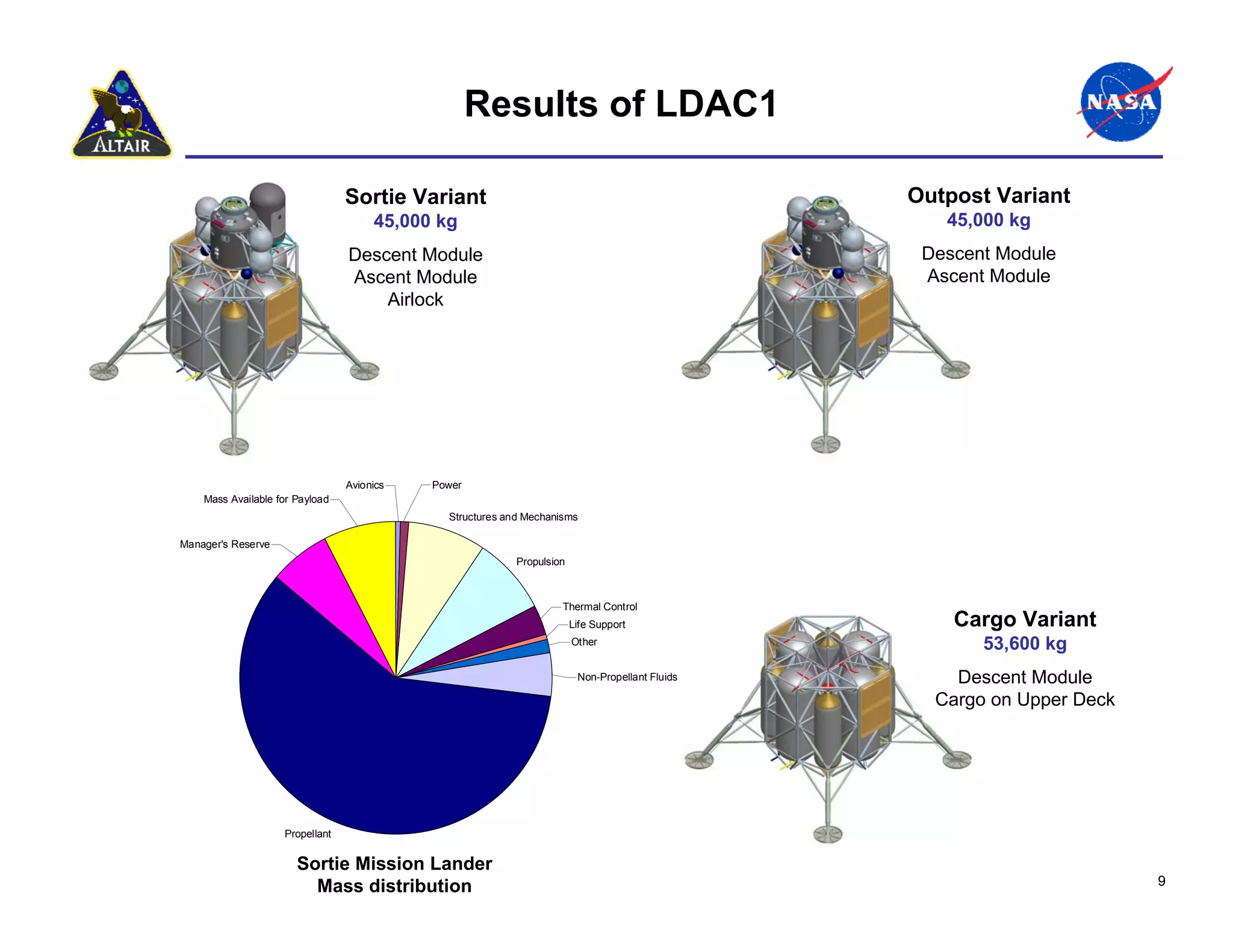
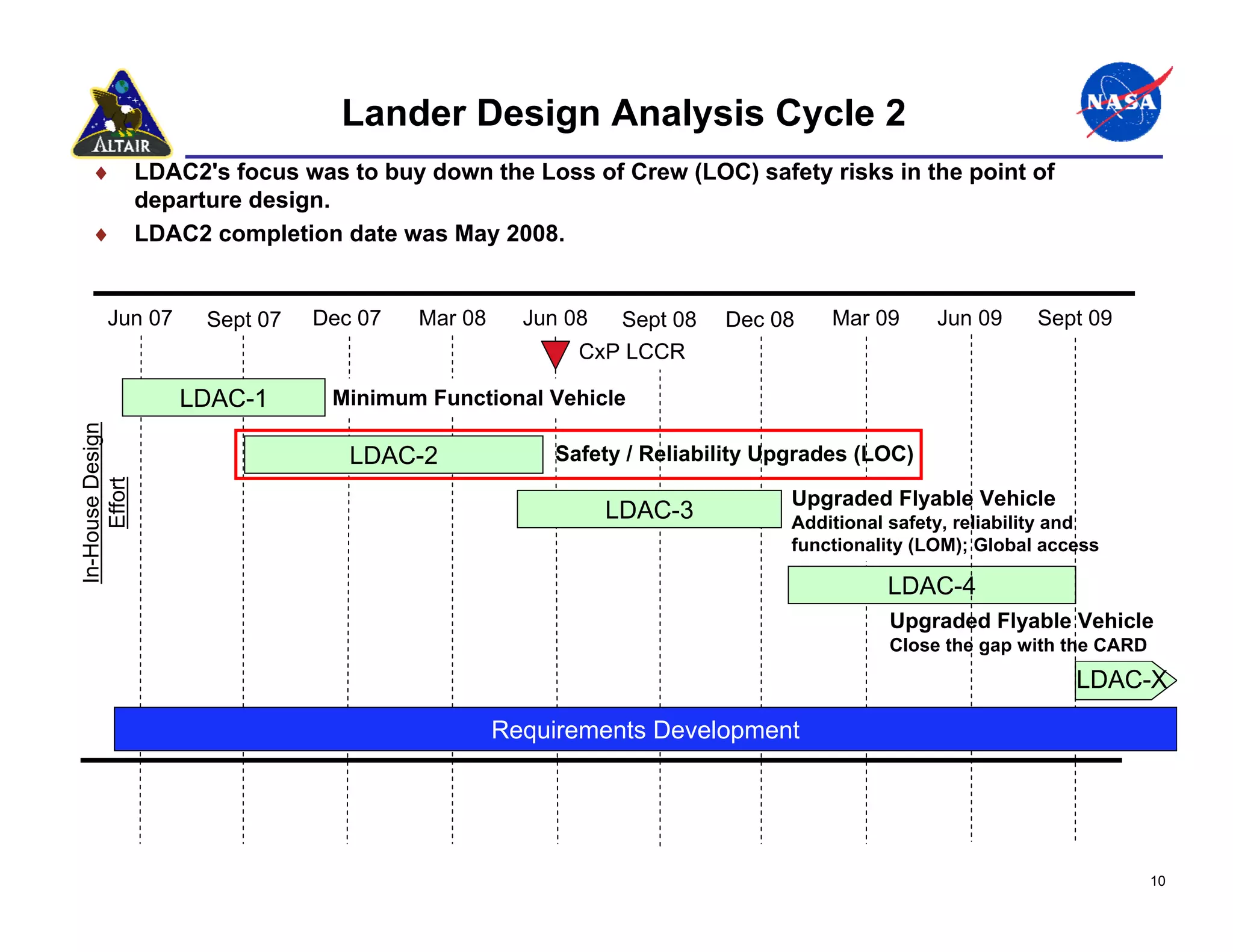
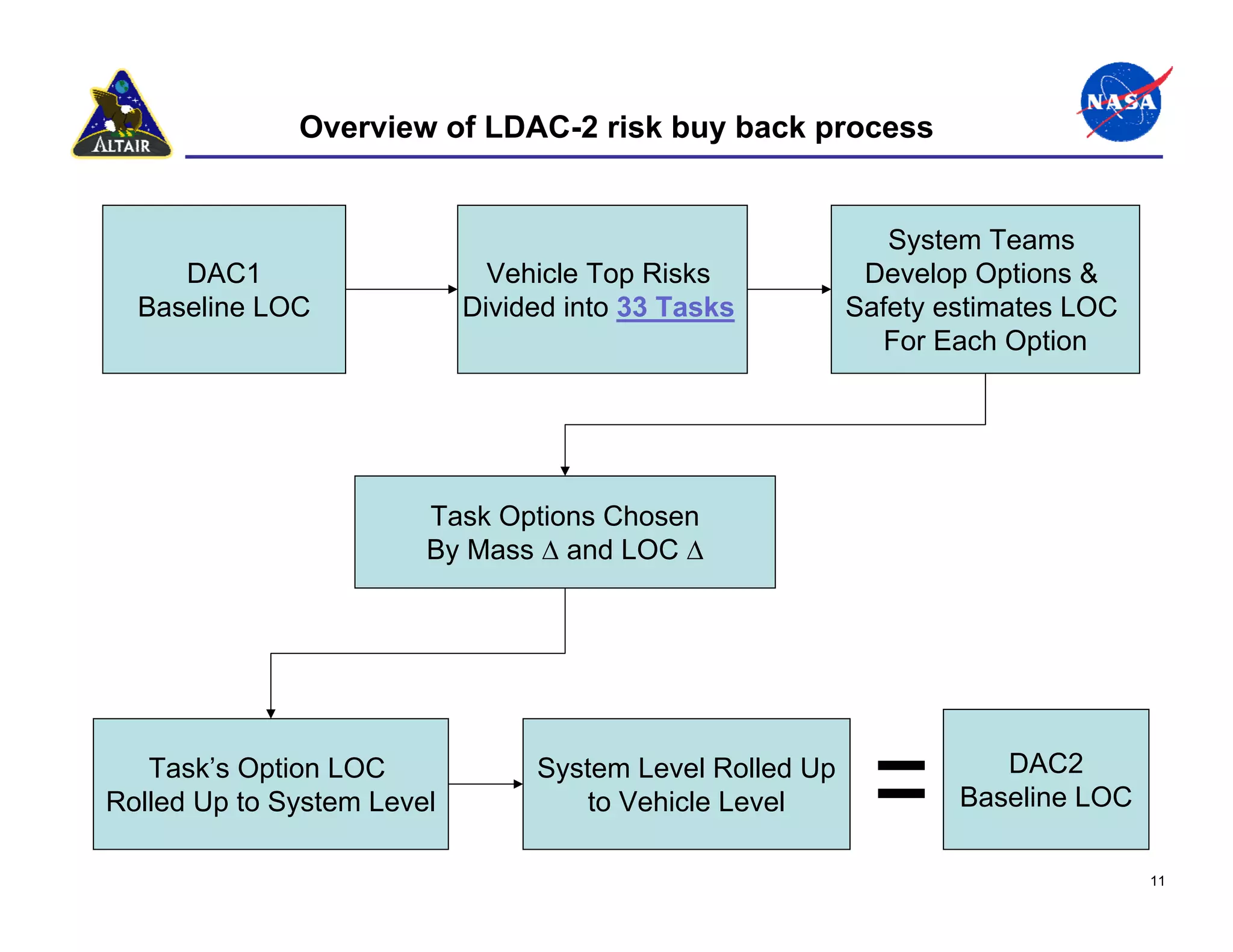
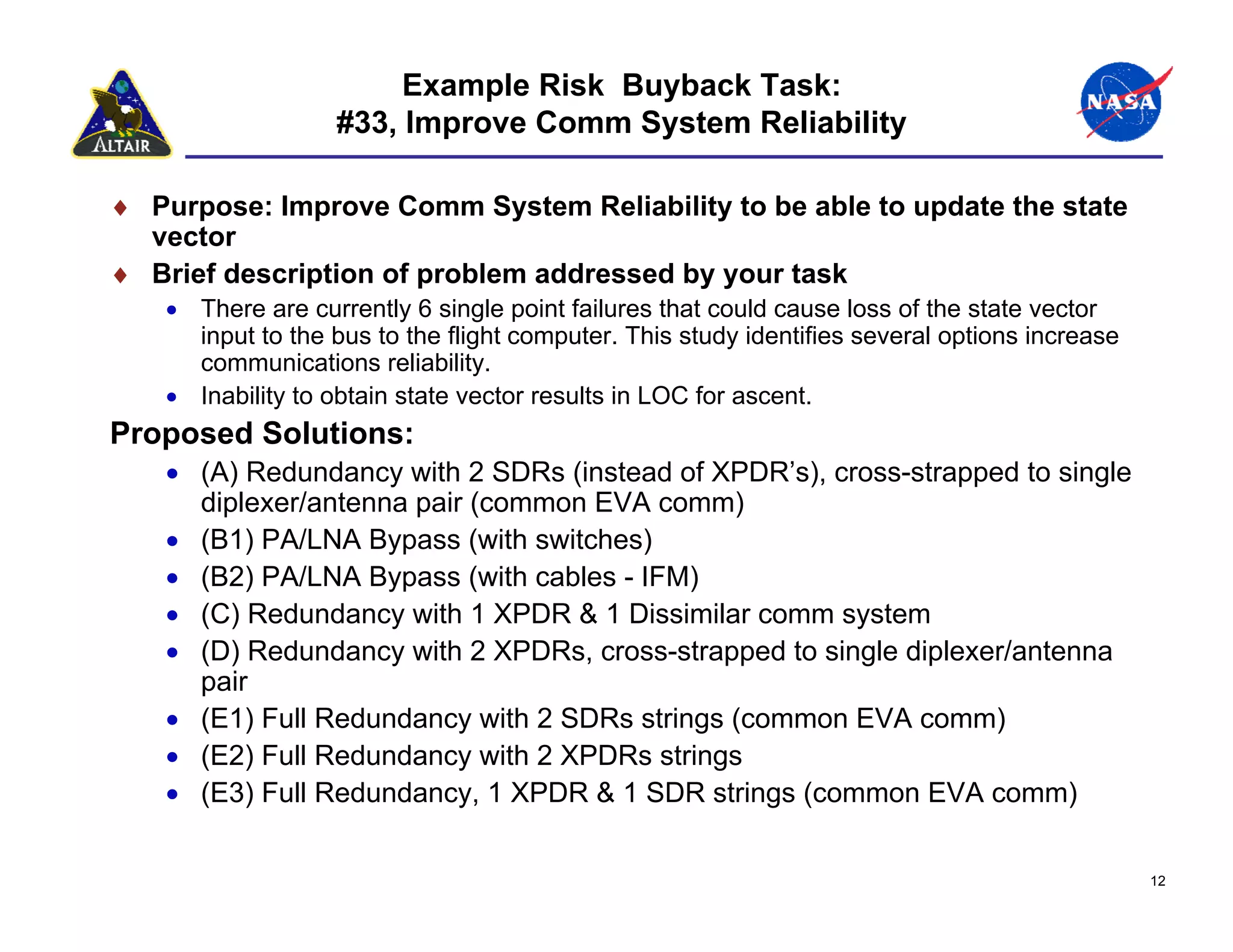
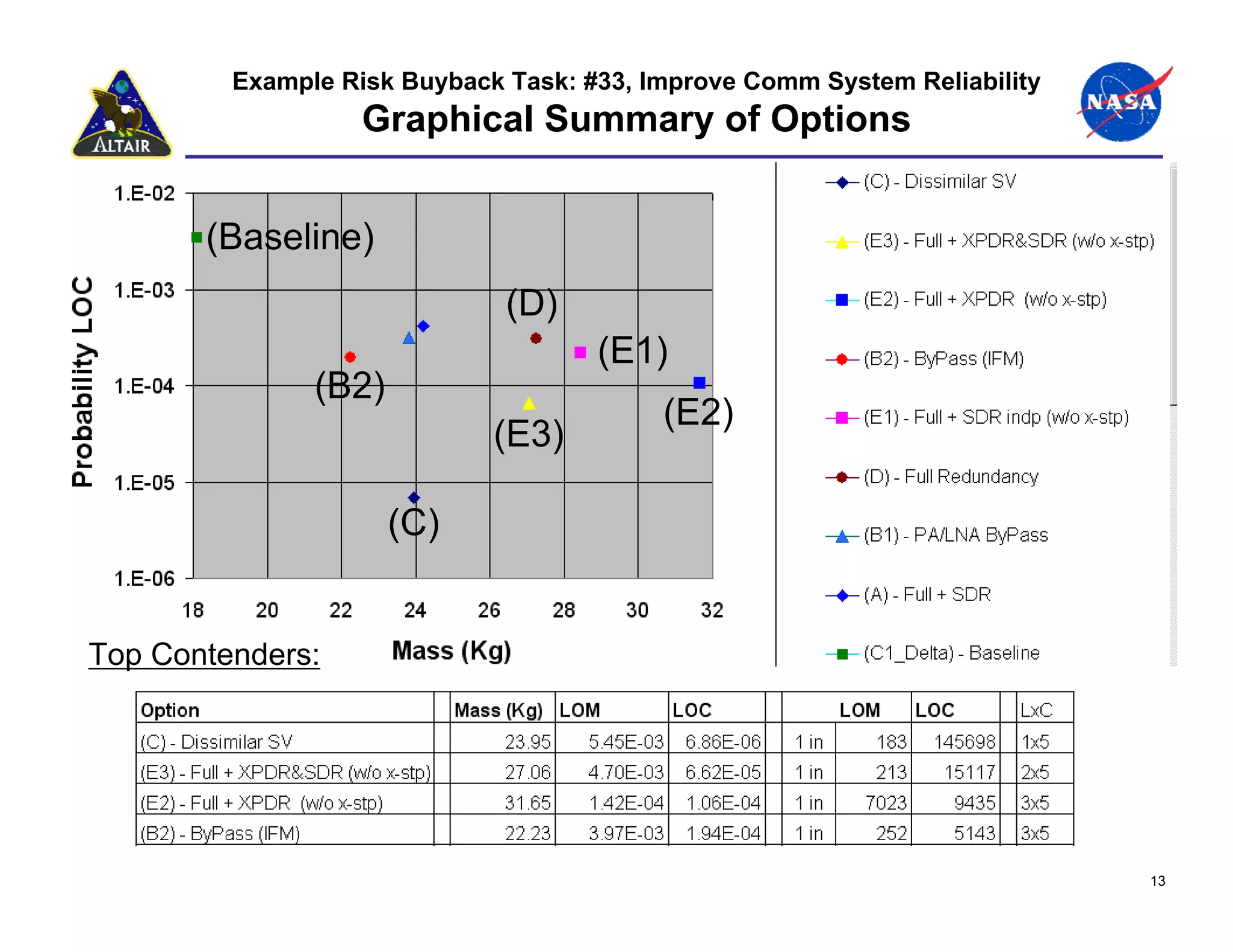
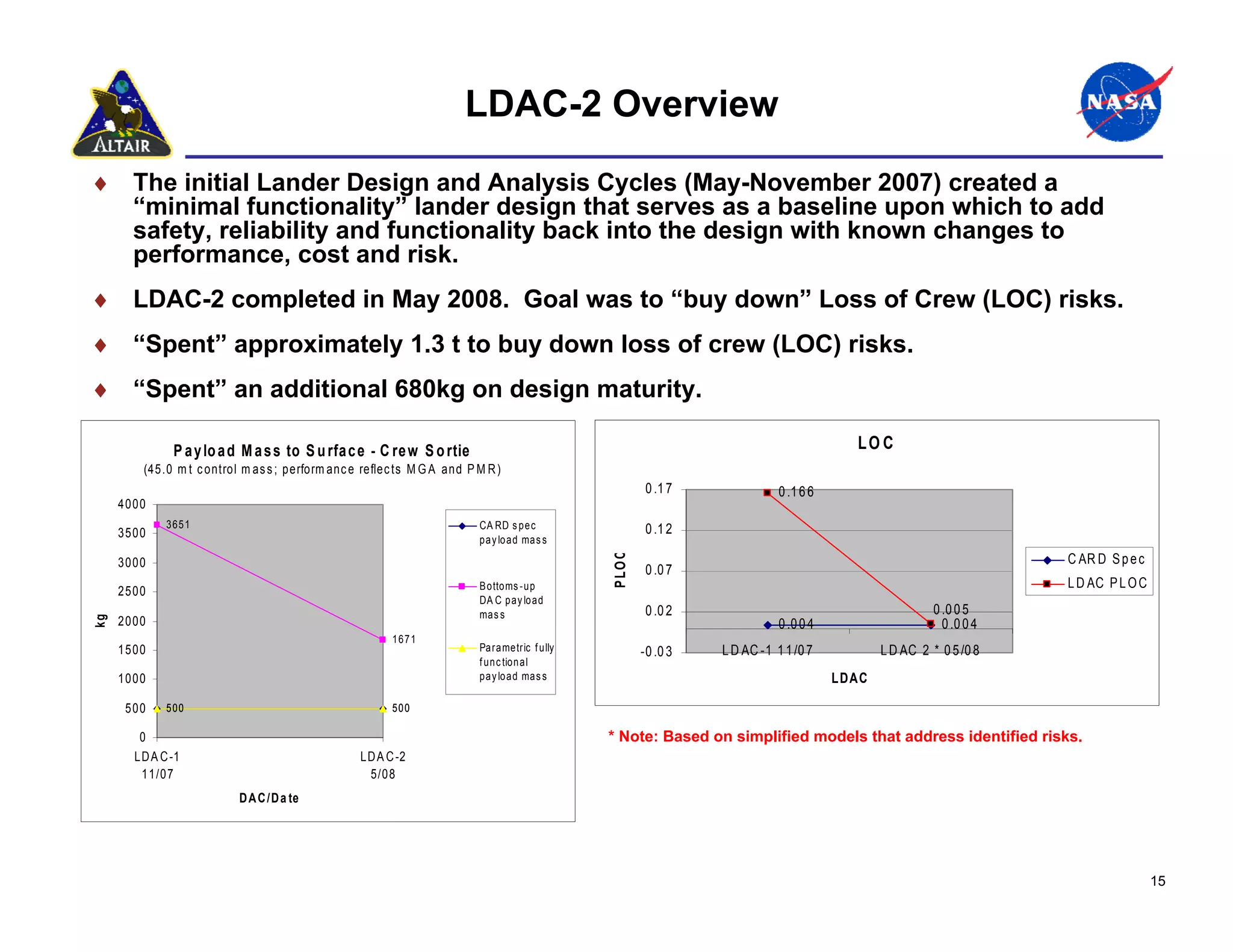
LDAC-1 developed a minimum functionality lunar lander design using a risk-informed approach to meet basic mission requirements. LDAC-2 then focused on reducing risks to crew safety by adding redundancy and reliability upgrades. The goal was to design a lander that provided adequate safety for crew with a design optimized for mass.
























































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)
















