Download as PDF, PPTX
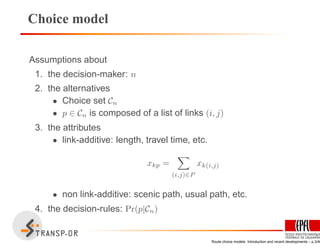
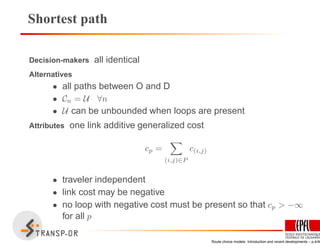
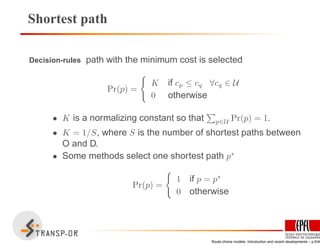
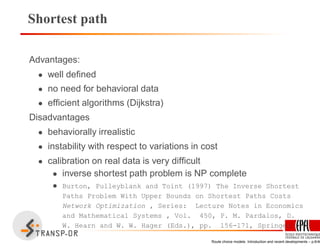
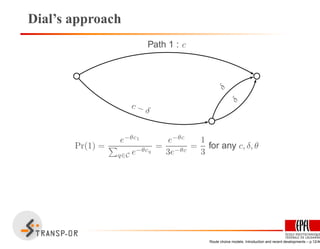
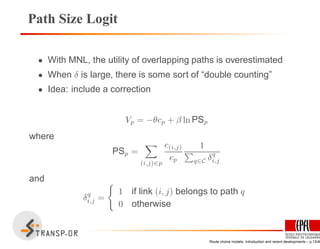
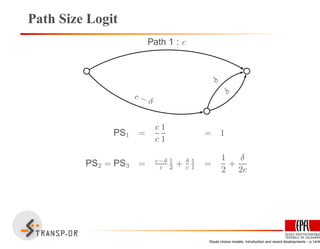
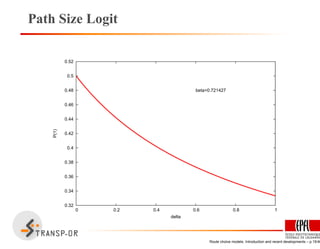
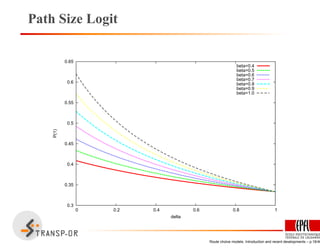
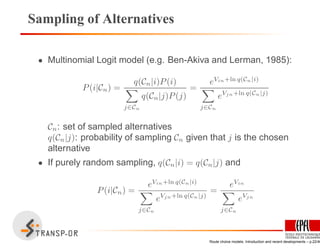
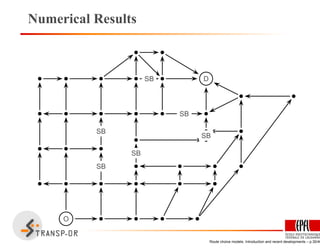

This document discusses route choice models and recent developments in the field. It introduces the basic components of a route choice model, including a transportation network, origin-destination pairs, link and path attributes. It then describes several classic models: the shortest path model, Dial's approach using a multinomial logit model on efficient paths, and the path size logit which addresses issues with overlapping paths in the multinomial logit. The document also discusses challenges with path enumeration and different approaches to address this such as stochastic path generation and sampling of alternatives from the universal set of paths.