Downloaded 54 times



![24
RAY: Distributed Computing for ML
Researchers in UC Berkeley created the framework
To speed up ML training with CPU cores or cluster nodes
API in Python, core in C++
High level libraries use Ray internally for distributed computation
Ray GitHub
RlLib: Scalable Reinforcement Learning
import ray
import ray.rllib.agents.ppo as ppo
ray.init()
SELECT_ENV = "CartPole-v1"
config = ppo.DEFAULT_CONFIG.copy()
config['num_workers'] = 8
config['model']['fcnet_hiddens'] = [40,20]
trainer = ppo.PPOTrainer(config, SELECT_ENV)
for n in range(20):
result = trainer.train()
print(result['episode_reward_mean'])
Ray Tune: Hyperparameter Tuning
import ray
from ray import tune
ray.init()
tune.run(
"PPO",
stop={"episode_reward_mean": 400},
config={
"env": "CartPole-v1",
"num_gpus": 0,
"num_workers": 6,
"model": {
'fcnet_hiddens': [
tune.grid_search([20, 40, 60, 80]),
tune.grid_search([20, 40, 60, 80])]},},)](https://image.slidesharecdn.com/reinforcementlearning-220212125446/75/Reinforcement-learning-24-2048.jpg)
![25
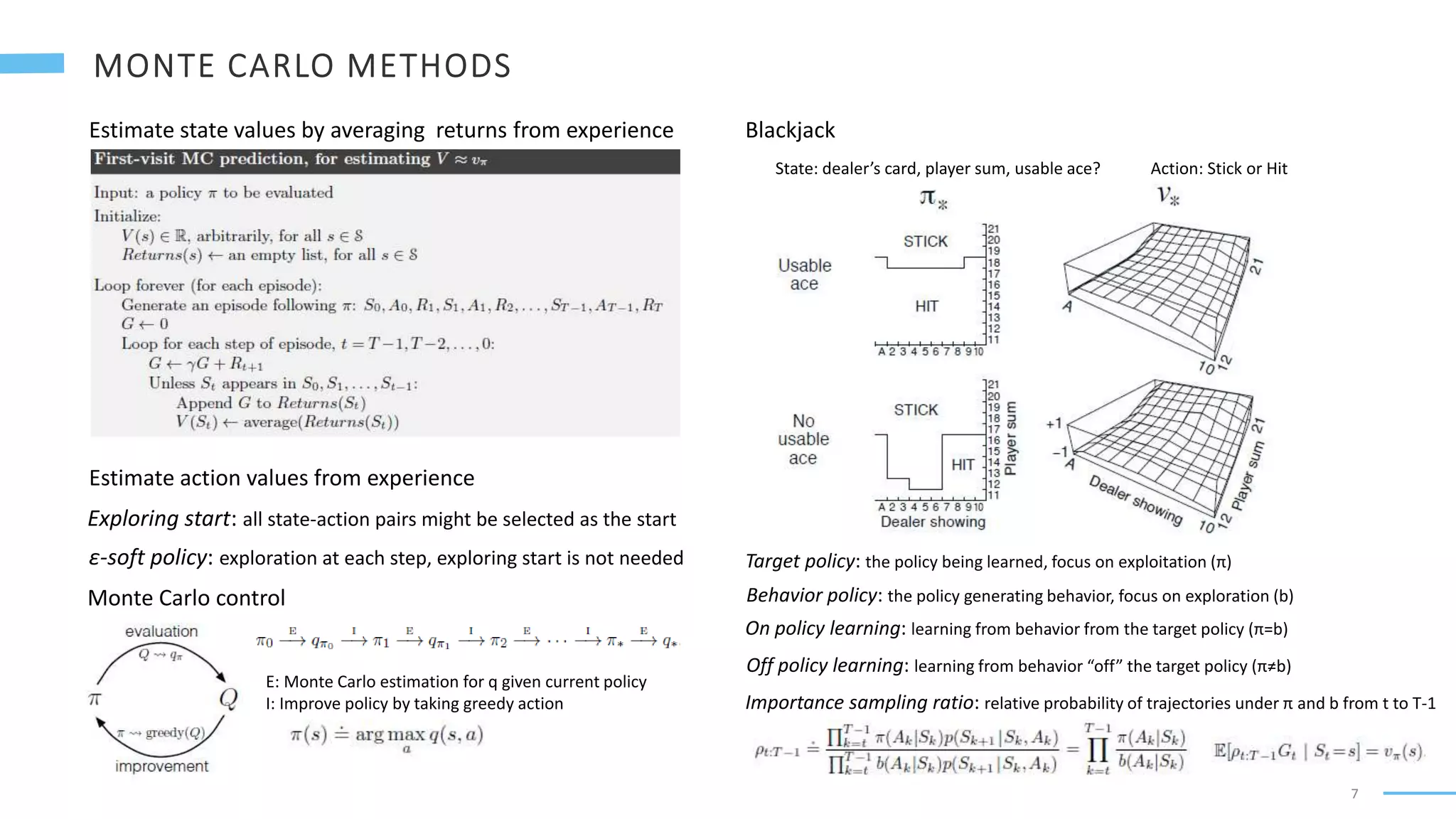
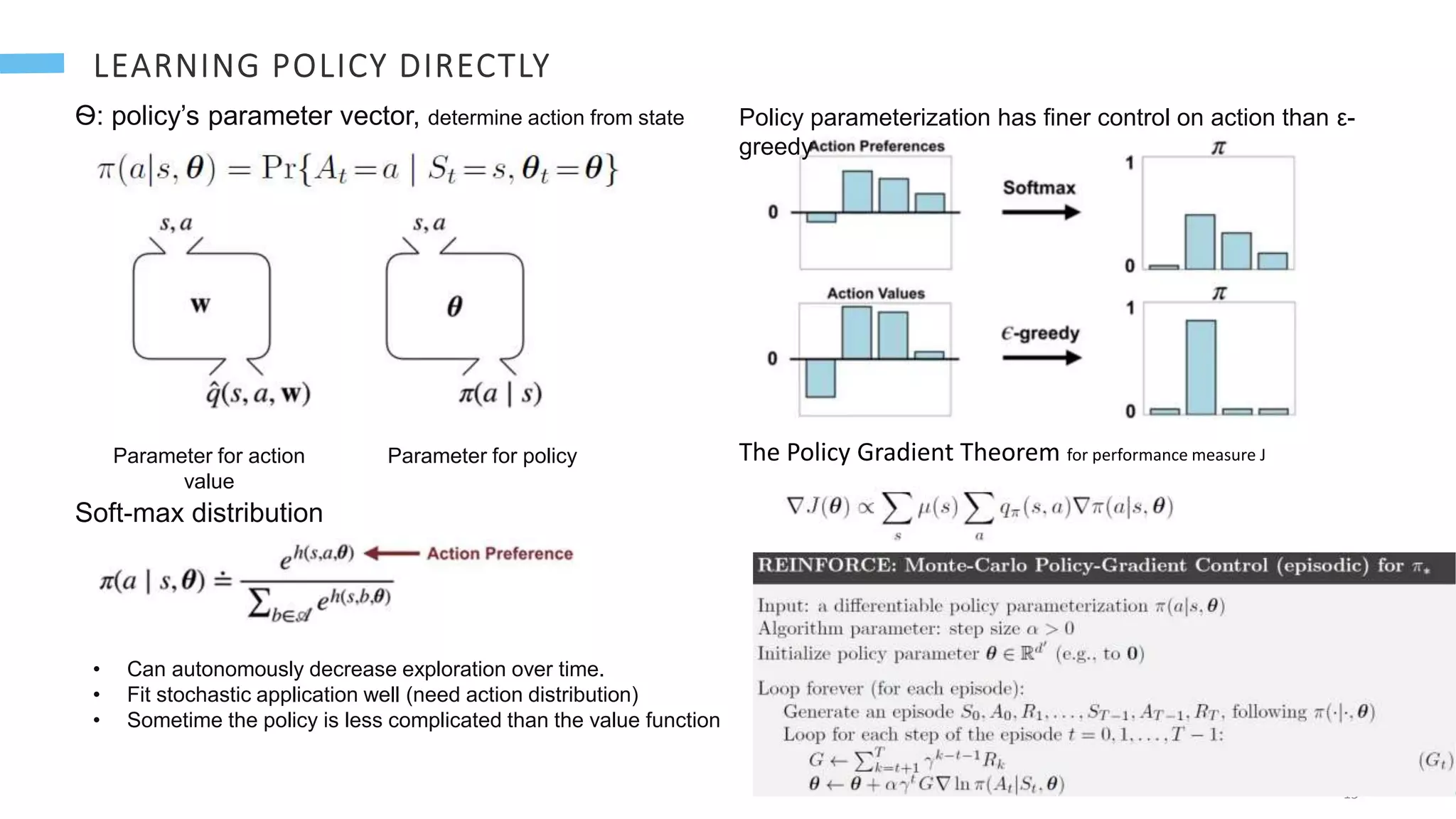
Policy: calculate action from state
Colab RlLib
Environment
import gym
env = gym.make('CartPole-v0’)
# Choose an action (either 0 or 1).
def sample_policy(state):
return 0 if state[0] < 0 else 1
def rollout_policy(env, policy):
state = env.reset()
done = False
cumulative_reward = 0
while not done:
action = policy(state)
# Take the action in the environment.
state, reward, done, _ = env.step(action)
cumulative_reward += reward
return cumulative_reward
reward = rollout_policy(env, sample_policy)
import gym, ray
from ray.rllib.agents import ppo
class MyEnv(gym.Env):
def __init__(self, env_config):
self.action_space = <gym.Space>
self.observation_space = <gym.Space>
def reset(self):
return <obs>
def step(self, action):
return <obs>, <reward: float>, <done: bool>, <info: dict>
ray.init()
trainer = ppo.PPOTrainer(env=MyEnv, config={
"env_config": {}, # config to pass to env class
})
while True:
print(trainer.train())
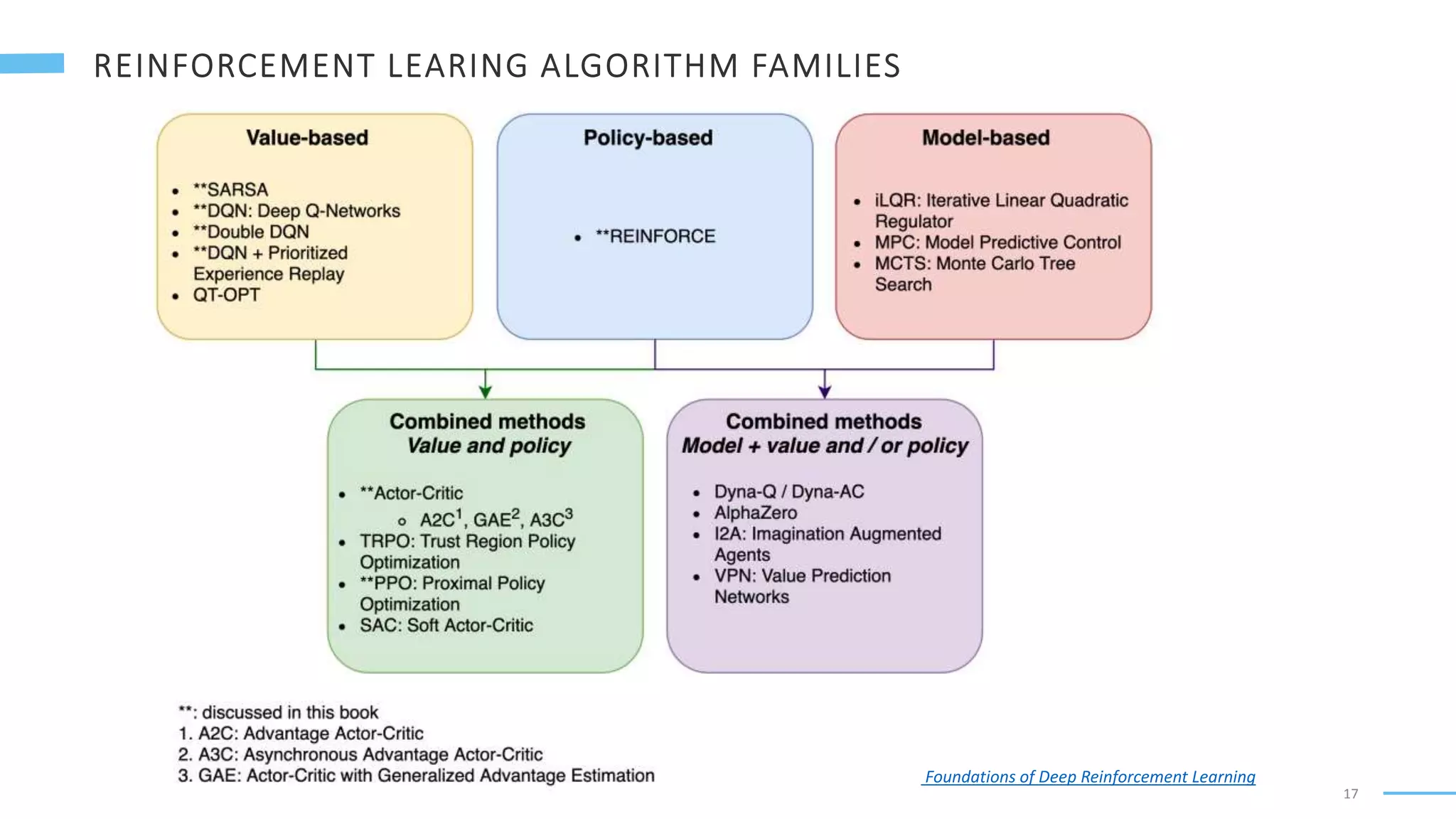
Algorithms](https://image.slidesharecdn.com/reinforcementlearning-220212125446/75/Reinforcement-learning-25-2048.jpg)
![27
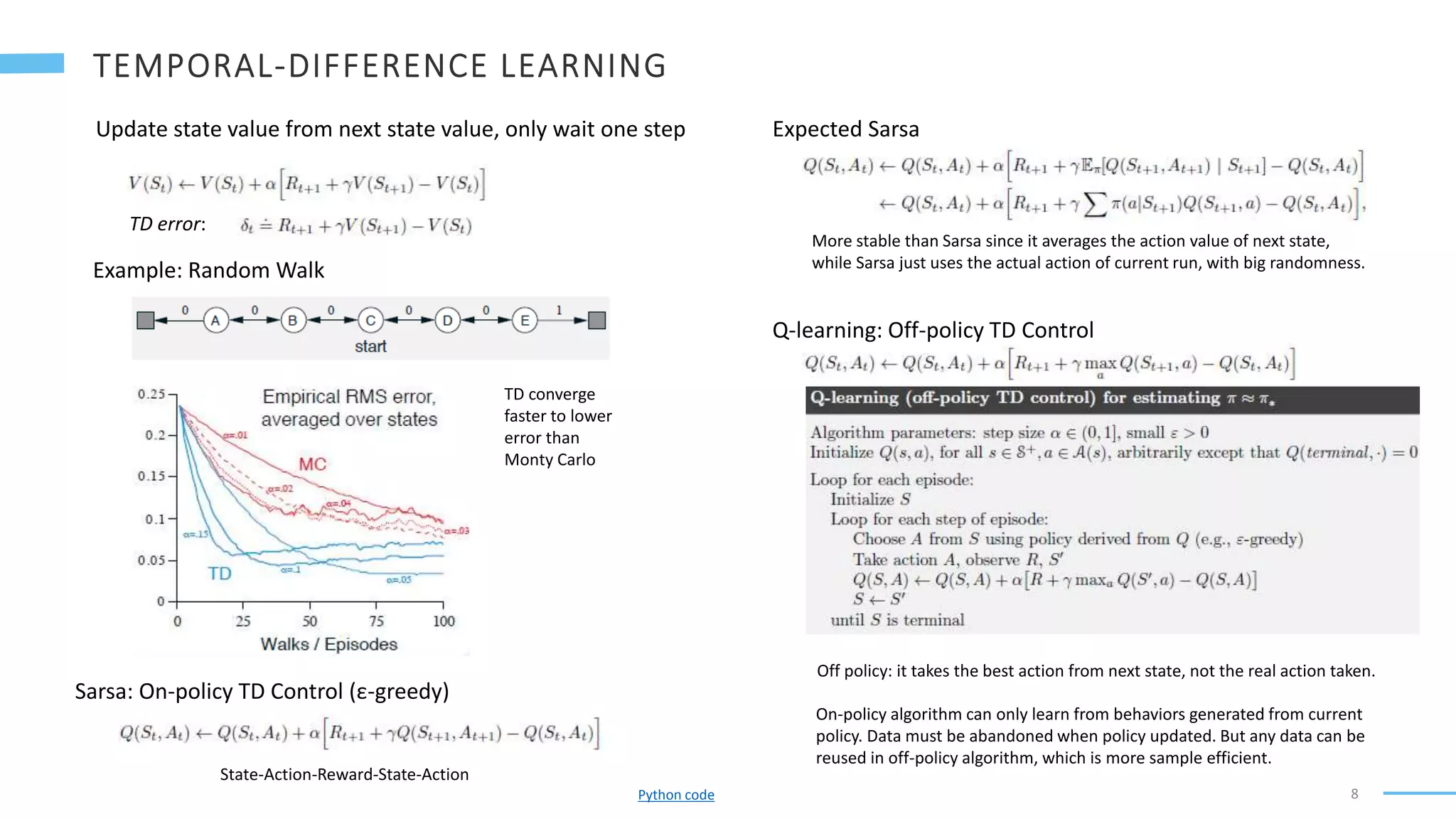
A simple REINFORCE car pole spec file
1 #
slm_lab/spec/benchmark/reinforce/reinforce_cartpole.js
on
2
3 {
4 "reinforce_cartpole": {
5 "agent": [{
6 "name": "Reinforce",
7 "algorithm": {
8 "name": "Reinforce",
9 "action_pdtype": "default",
10 "action_policy": "default",
11 "center_return": true,
12 "explore_var_spec": null,
13 "gamma": 0.99,
14 "entropy_coef_spec": {
15 "name": "linear_decay",
16 "start_val": 0.01,
17 "end_val": 0.001,
18 "start_step": 0,
19 "end_step": 20000,
20 },
21 "training_frequency": 1
22 },
23 "memory": {
24 "name": "OnPolicyReplay"
25 },
26 "net": {
27 "type": "MLPNet",
28 "hid_layers": [64],
29 "hid_layers_activation": "selu",
30 "clip_grad_val": null,
31 "loss_spec": {
32 "name": "MSELoss"
33 },
34 "optim_spec": {
35 "name": "Adam",
36 "lr": 0.002
37 },
38 "lr_scheduler_spec": null
39 }
40 }],
41 "env": [{
42 "name": "CartPole-v0",
43 "max_t": null,
44 "max_frame": 100000,
45 }],
46 "body": {
47 "product": "outer",
48 "num": 1
49 },
50 "meta": {
51 "distributed": false,
52 "eval_frequency": 2000,
53 "max_session": 4,
54 "max_trial": 1,
55 },
56 ...
57 }
58 }
REINFORCE spec file with search spec for different gamma values
1 # slm_lab/spec/benchmark/reinforce/reinforce_cartpole.json
2
3 {
4 "reinforce_cartpole": {
5 ...
6 "meta": {
7 "distributed": false,
8 "eval_frequency": 2000,
9 "max_session": 4,
10 "max_trial": 1,
11 },
12 "search": {
13 "agent": [{
14 "algorithm": {
15 "gamma__grid_search": [0.1, 0.5, 0.7, 0.8, 0.90, 0.99, 0.999]
16 }
17 }]
18 }
19 }
20 }
γ values above 0.90 perform better,
with γ = 0.999 from trial 6 giving the
best result. When γ is too low, the
algorithm fails to learn a policy that
solves the problem, and the learning
curve stays flat.](https://image.slidesharecdn.com/reinforcementlearning-220212125446/75/Reinforcement-learning-27-2048.jpg)

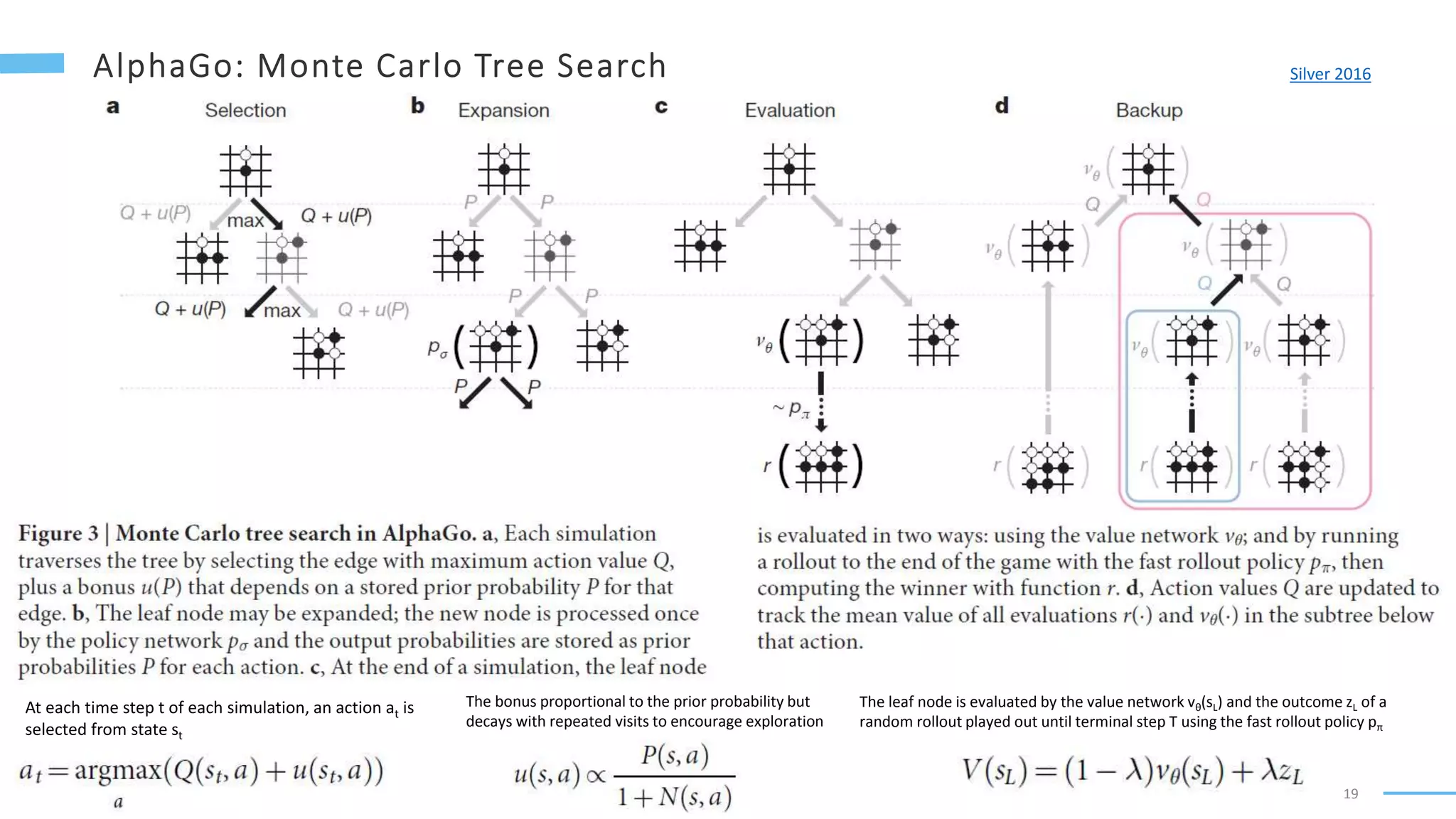
Here are the key steps to run a REINFORCE algorithm on the CartPole environment using SLM Lab: 1. Define the REINFORCE agent configuration in a spec file. This specifies things like the algorithm name, hyperparameters, network architecture, optimizer, etc. 2. Define the CartPole environment configuration. 3. Initialize SLM Lab and load the spec file: ```js const slmLab = require('slm-lab'); slmLab.init(); const spec = require('./reinforce_cartpole.js'); ``` 4. Create an experiment with the spec: ```js const experiment = new slmLab.Experiment(spec



























![[PR12] You Only Look Once (YOLO): Unified Real-Time Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/yolo-170616085751-thumbnail.jpg?width=640&height=640&fit=bounds)



































![[DSC Europe 25] Ivan Peric - Intelligence Swarm Logic and Techno-Functional M...](https://cdn.slidesharecdn.com/ss_thumbnails/7my7c97fsduiccadgavw-2-251212103249-5a03f7c6-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Uros Pesic - The Reality of AI in Marketing.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/rtkodnmtycovsllvzsyn-9-251215095918-b0c6bfe3-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Tatevik Maytesyan - How to actually use AI in marketing: gett...](https://cdn.slidesharecdn.com/ss_thumbnails/tjo626lsqdgfntbgl2mw-4-251216103155-e36cd239-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DSC Europe 25] Branko Urosevic -Rethinking Financial Talent: Integrating Cod...](https://cdn.slidesharecdn.com/ss_thumbnails/8jjrus8ttko6qj64f58f-3-251212103250-642c6374-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DSC Europe 25] Dusan Nesic - Securing Tomorrow’s Infrastructure: Why Cyber-P...](https://cdn.slidesharecdn.com/ss_thumbnails/qikbszfftyowjm2q6duw-1-251211083848-8f2ead6b-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DSC Europe 25] Debmalya Biswas - Agentification: the art of transforming man...](https://cdn.slidesharecdn.com/ss_thumbnails/r5azlggvtqiaiiusrqdr-4-251212103249-5a12c89b-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DSC Europe 25] Katherine Forrest - AI NOW: Understanding the Velocity of Cha...](https://cdn.slidesharecdn.com/ss_thumbnails/wvvbruqfrci0sfq9xwgb-4-251212104007-e5ad1987-thumbnail.jpg?width=640&height=640&fit=bounds)