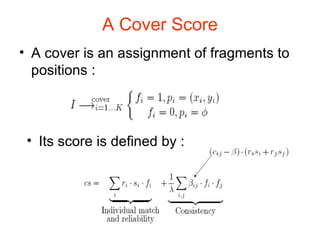
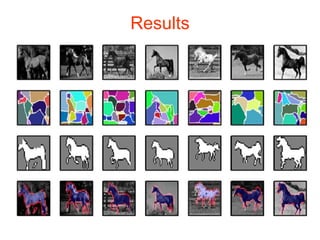
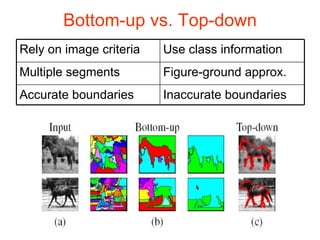
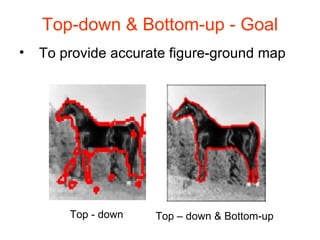
The document presents a method for generating figure-ground maps using a class-specific segmentation approach, integrating top-down and bottom-up techniques. It discusses the use of fragment-based representation to define object boundaries and employs a greedy iterative algorithm for optimizing fragment coverage. The proposed solution aims to improve segmentation accuracy by balancing the requirements of object classification against image-based variability.