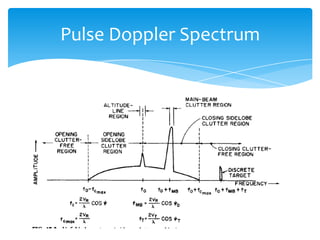
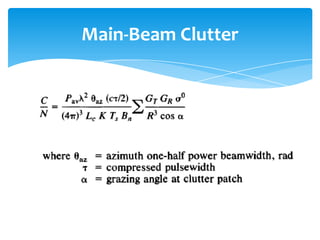
This document discusses pulse Doppler spectrum and radar clutter. It begins with an overview of pulse Doppler spectrum and then discusses different types of clutter including ground clutter from stationary and moving radars, sidelobe clutter, main beam clutter, and clutter from rain and chaff. It also briefly discusses single target tracking and multiple target tracking methods for pulse Doppler radars.