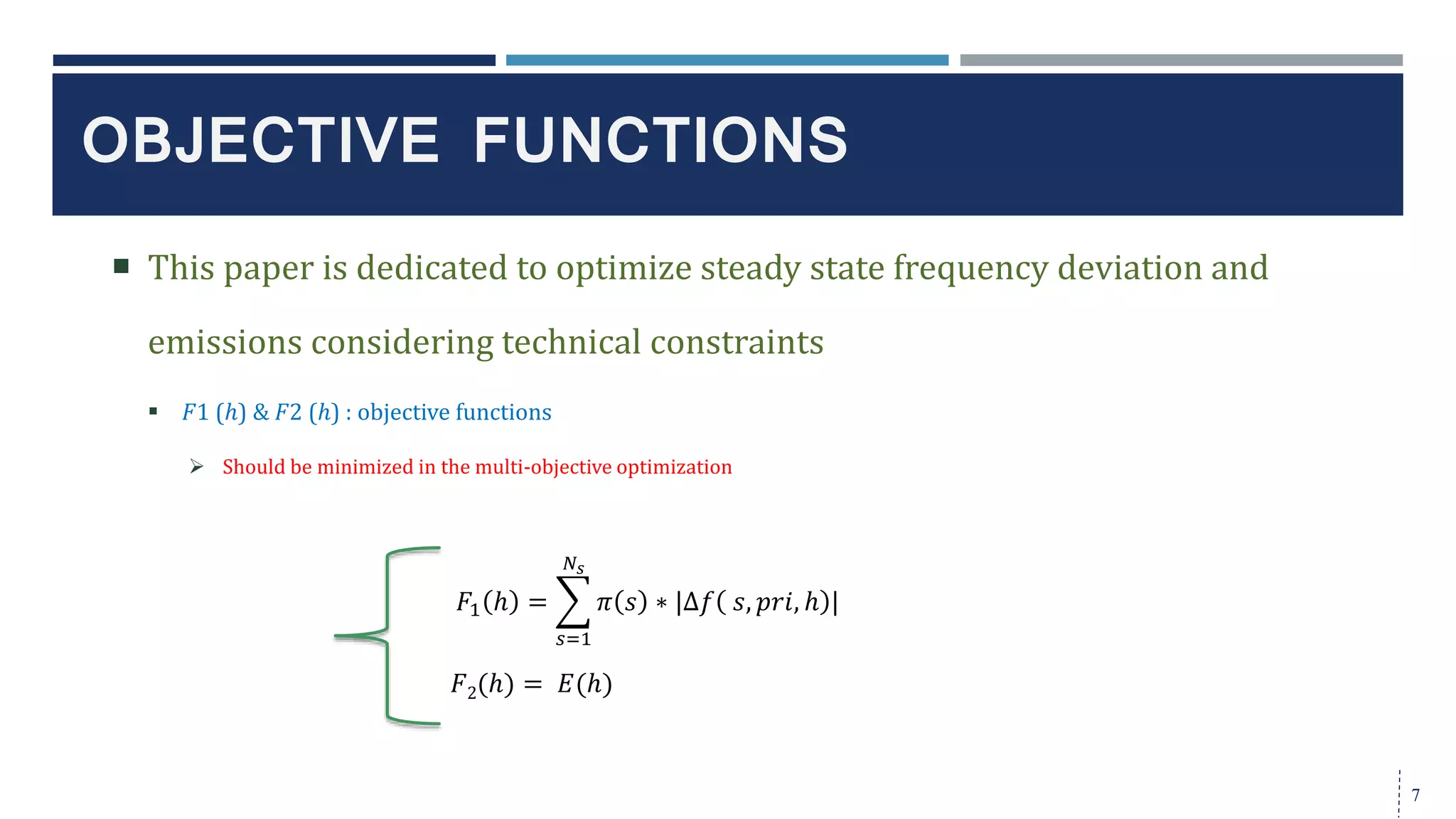
The document presents a hierarchical energy management system for microgrids, focusing on droop controlled dispatchable energy resources (DERs) for frequency control during uncertainties. It details modeling techniques, simulation results, and optimization schemes aimed at minimizing frequency deviations and emissions. The findings underscore the effectiveness of droop controlled DERs in enhancing microgrid operational performance and meeting environmental objectives.




![Microgrid frequency deviation in
scenario s, control level m, and at hour h
DROOP CONTROL OF DERS
6
P-f droop control technique applied to DERs by EMS
𝑖=1
𝑁 𝑔
∆𝑃𝑔( 𝑠, 𝑖, 𝑚, ℎ) = 𝑖=1
𝑁 𝑔
∆𝑃𝑟𝑒𝑓 𝑠, 𝑖, 𝑚, ℎ − 𝑖=1
𝑁 𝑔 1
𝑚 𝑝
∗ ∆𝑓 𝑠, 𝑚, ℎ , 𝑚 = 𝑝𝑟𝑖, 𝑠𝑒𝑐
Primary and Secondary
control levels
∆𝑃𝑔 𝑠, 𝑖, 𝑚, ℎ = 𝑃𝑔
𝑠 𝑖, 𝑚, ℎ − 𝑃𝑔 𝑖, ℎ
Active power deviation of DER i
o in scenario s, control level m, and hour h.
𝑊𝑖,ℎ,𝑠
𝐷𝐸𝑅
∗
1
𝑚 𝑝 𝑖
∗ ∆𝑓 𝑠, 𝑚, ℎ = −𝑊𝑖,ℎ,𝑠
𝐷𝐸𝑅
∗ ∆𝑃𝑔 𝑠, 𝑖, 𝑚, ℎ , 𝑚 = 𝑝𝑟𝑖
𝑃𝑔
𝑠
𝑖, 𝑚, ℎ = 𝑊𝑖,ℎ,𝑠
𝐷𝐸𝑅
. 𝑃𝑟𝑒𝑓
𝑠
𝑖, 𝑚, ℎ −
1
𝑚 𝑝 𝑖
∗ ∆𝑓 𝑠, 𝑚, ℎ , 𝑚 = 𝑠𝑒𝑐
Active power output of DER i
in scenario s, control level m and hour h.
Forecasted active power output of DER i
at hour h.
∆𝑓 𝑠, 𝑝𝑟𝑖, ℎ =
− 𝑖=1
𝑁 𝑔
𝑊𝑖,ℎ,𝑠
𝐷𝐸𝑅
∗ ∆𝑃𝑔(𝑠, 𝑖, 𝑚, ℎ)
𝐷 𝑠, 𝑚, ℎ + 𝑖=1
𝑁 𝑔
𝑊𝑖,ℎ,𝑠
𝐷𝐸𝑅
∗
1
𝑚 𝑝(𝑖)
∆𝑓 𝑠, 𝑠𝑒𝑐, ℎ = 𝑖=1
𝑁 𝑔
𝑊𝑖,ℎ,𝑠
𝐷𝐸𝑅
∗ [𝑃𝑟𝑒𝑓
𝑠
𝑖, 𝑚, ℎ − 𝑃𝑔
𝑠
𝑖, 𝑚, ℎ ]
𝐷 𝑠, 𝑚, ℎ + 𝑖=1
𝑁 𝑔
𝑊𝑖,ℎ,𝑠
𝐷𝐸𝑅
∗
1
𝑚 𝑝(𝑖)
In the primary level, reference power set point and the dispatched power output of the committed available
DER units are exactly equal, so: 𝑃𝑔
𝑠
𝑖, 𝑝𝑟𝑖, ℎ = 𝑃𝑟𝑒𝑓
𝑠
𝑖, 𝑝𝑟𝑖, ℎ
Reference power of DER i, in scenario s,
primary control level, and hour h](https://image.slidesharecdn.com/presentation22-171115231113/75/Presentation22-6-2048.jpg)