Downloaded 18 times






![CURRENT REGULATOR
1
dq0
sin_cos
abc
abc
sin_cos
dq0
0
z
1
[Iq]
[Id]
[Id]
[Iq]
Freq
Sin_Cos
wt
Uref Pulses
PI
PI
3
Iabc_inv
2
Iq_ref
1
Id_ref](https://image.slidesharecdn.com/mgppt-170609073432/75/Analysis-of-Low-Frequency-Oscillations-in-Autonomous-Microgrid-in-Staic-and-Dynamic-Loac-15-2048.jpg)
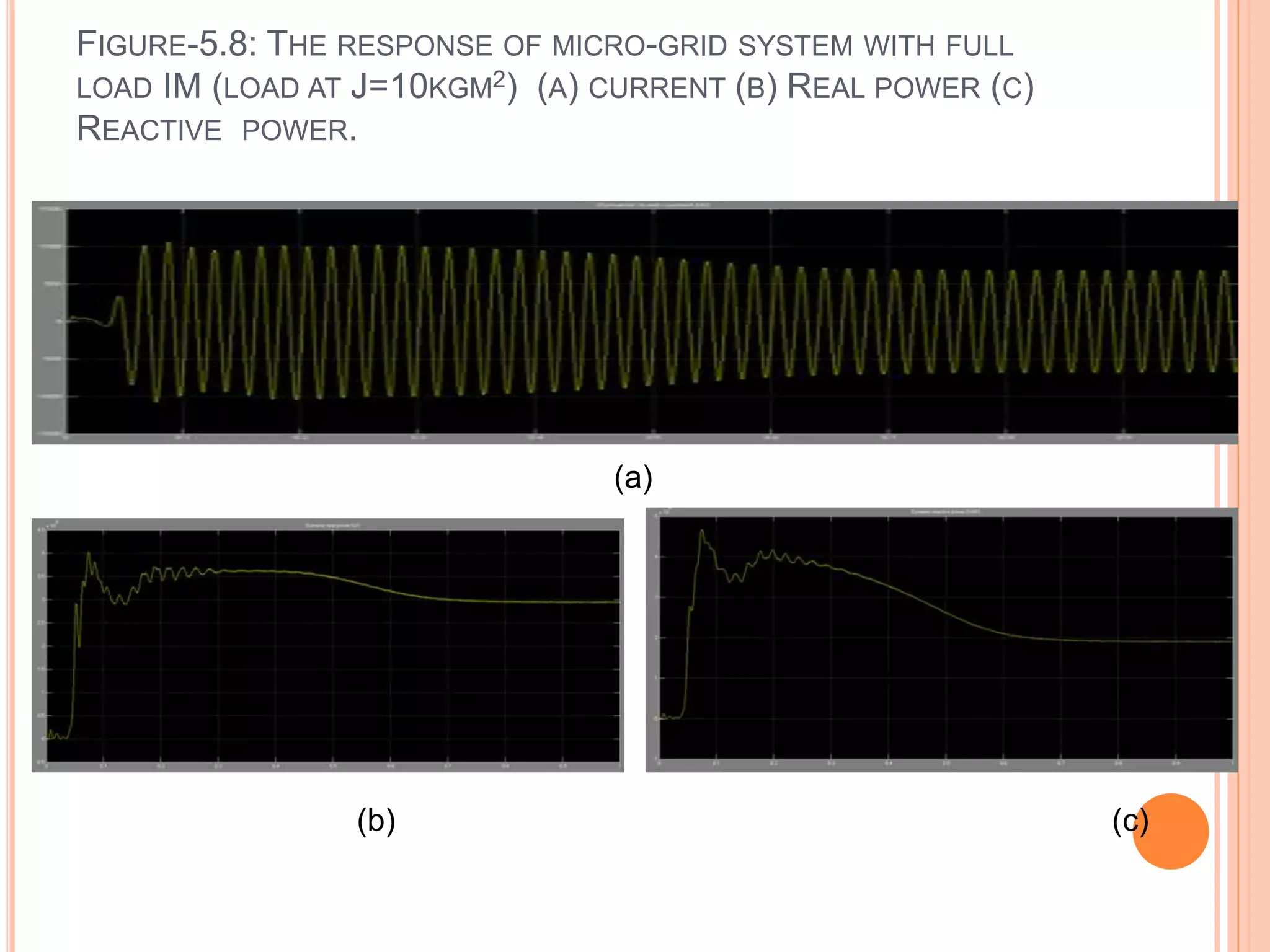
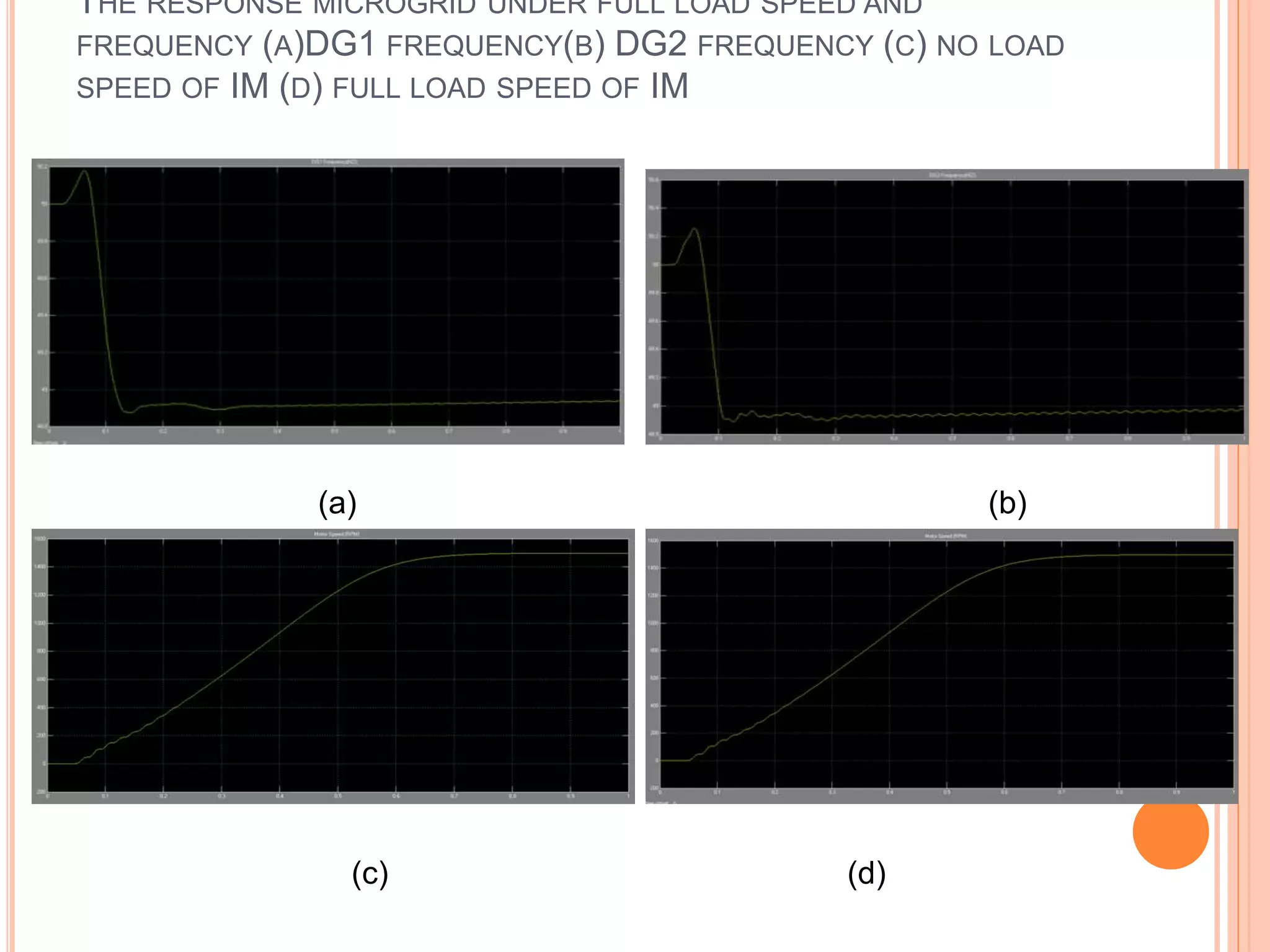
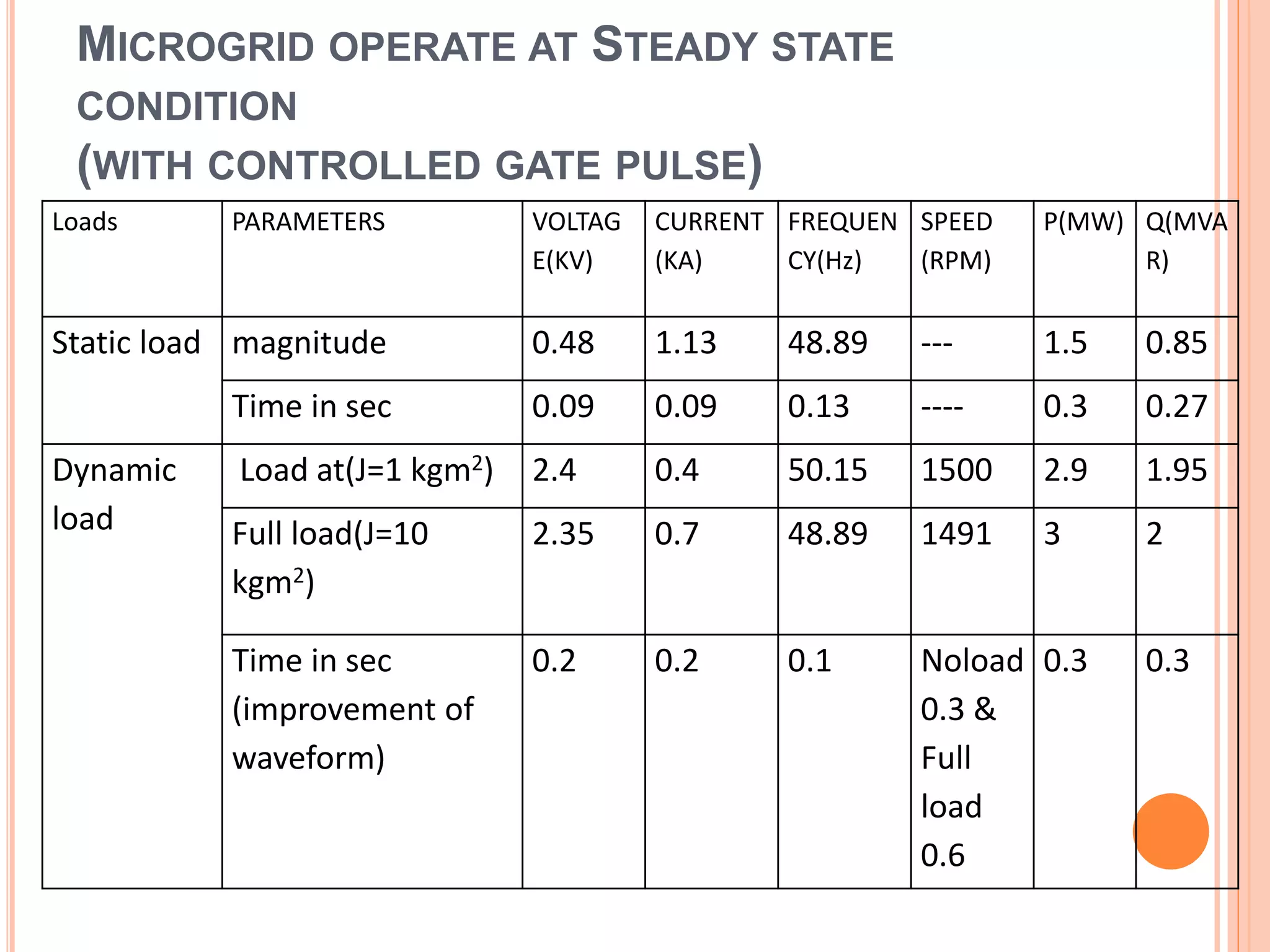
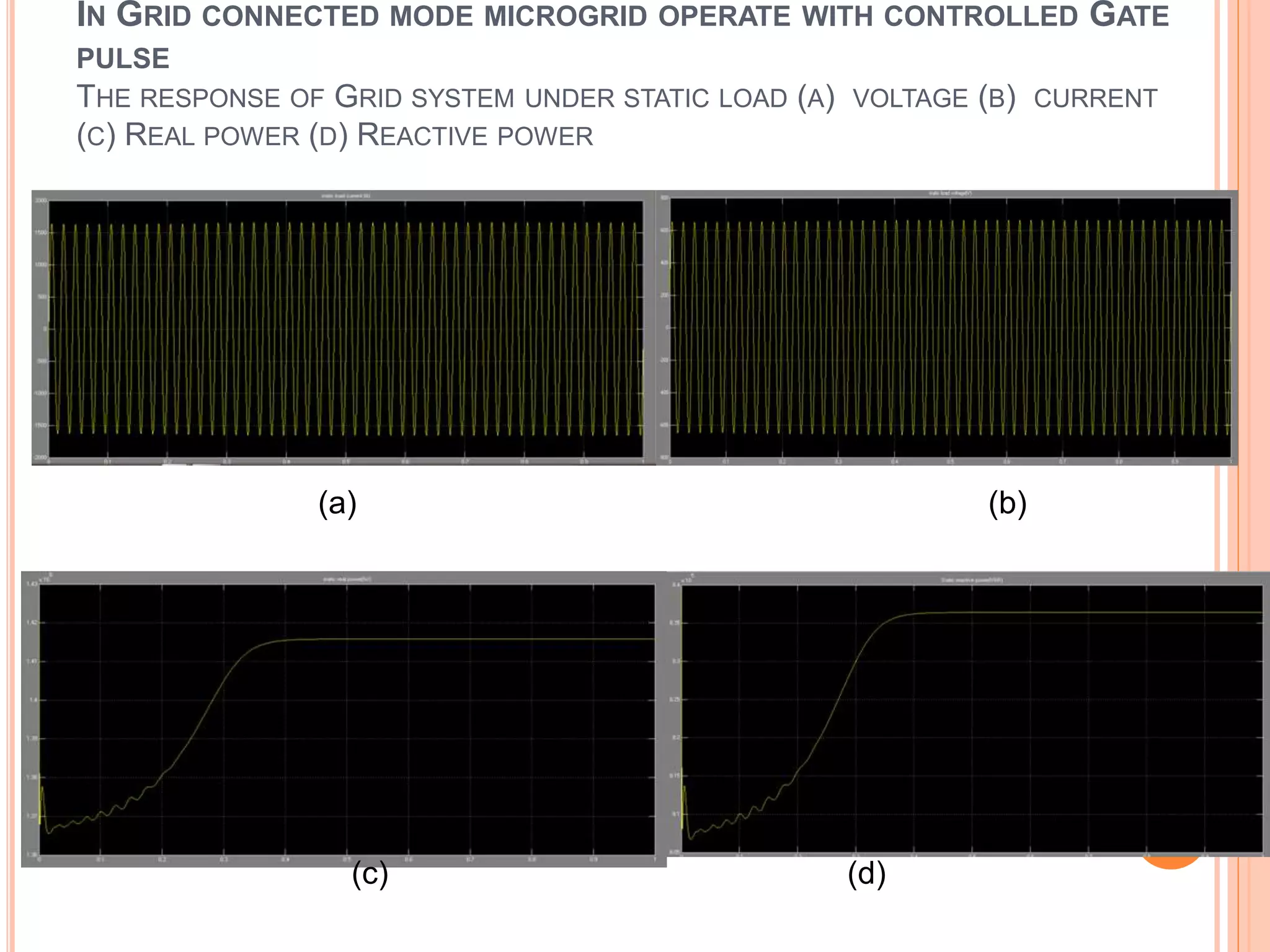
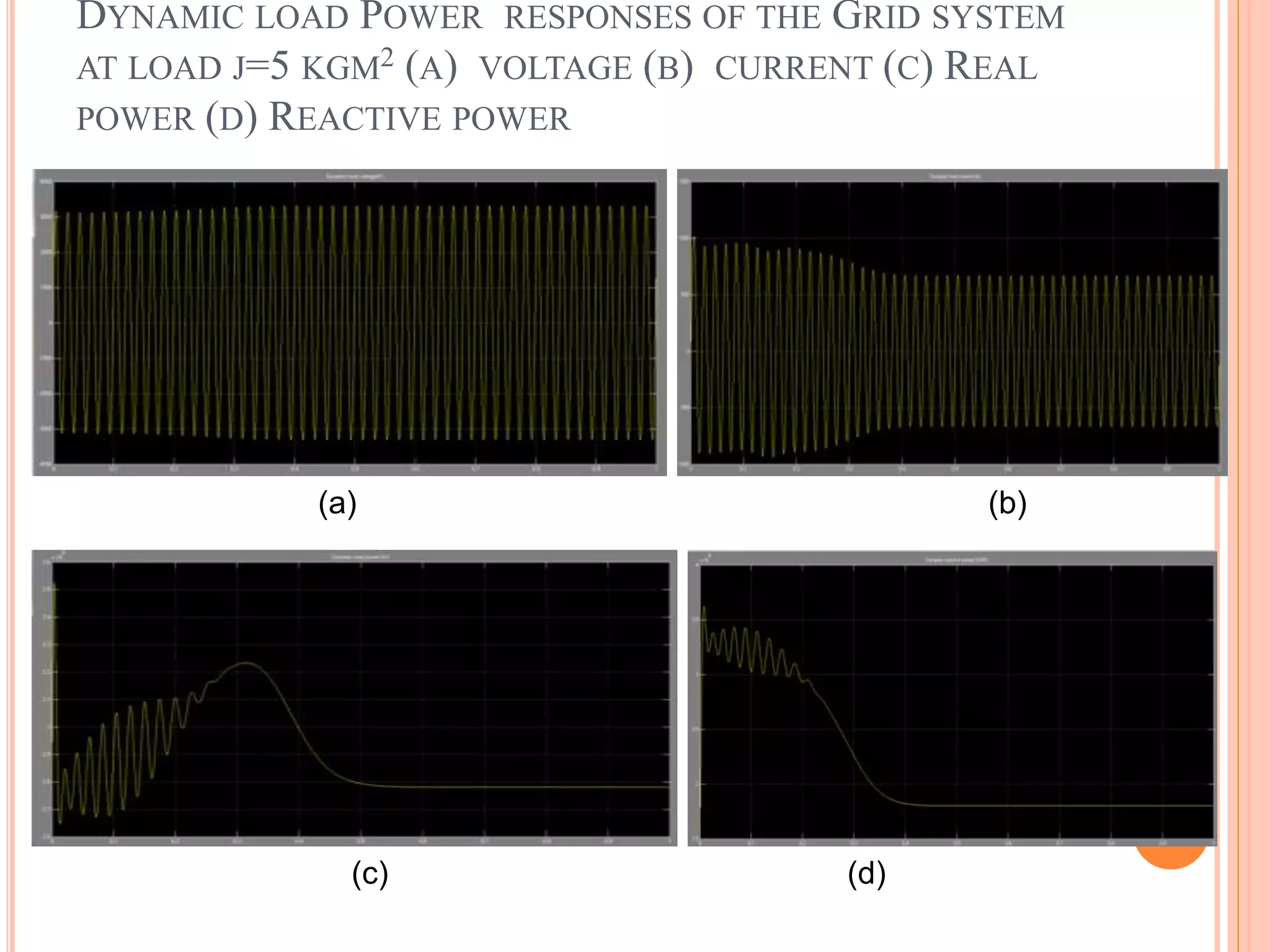
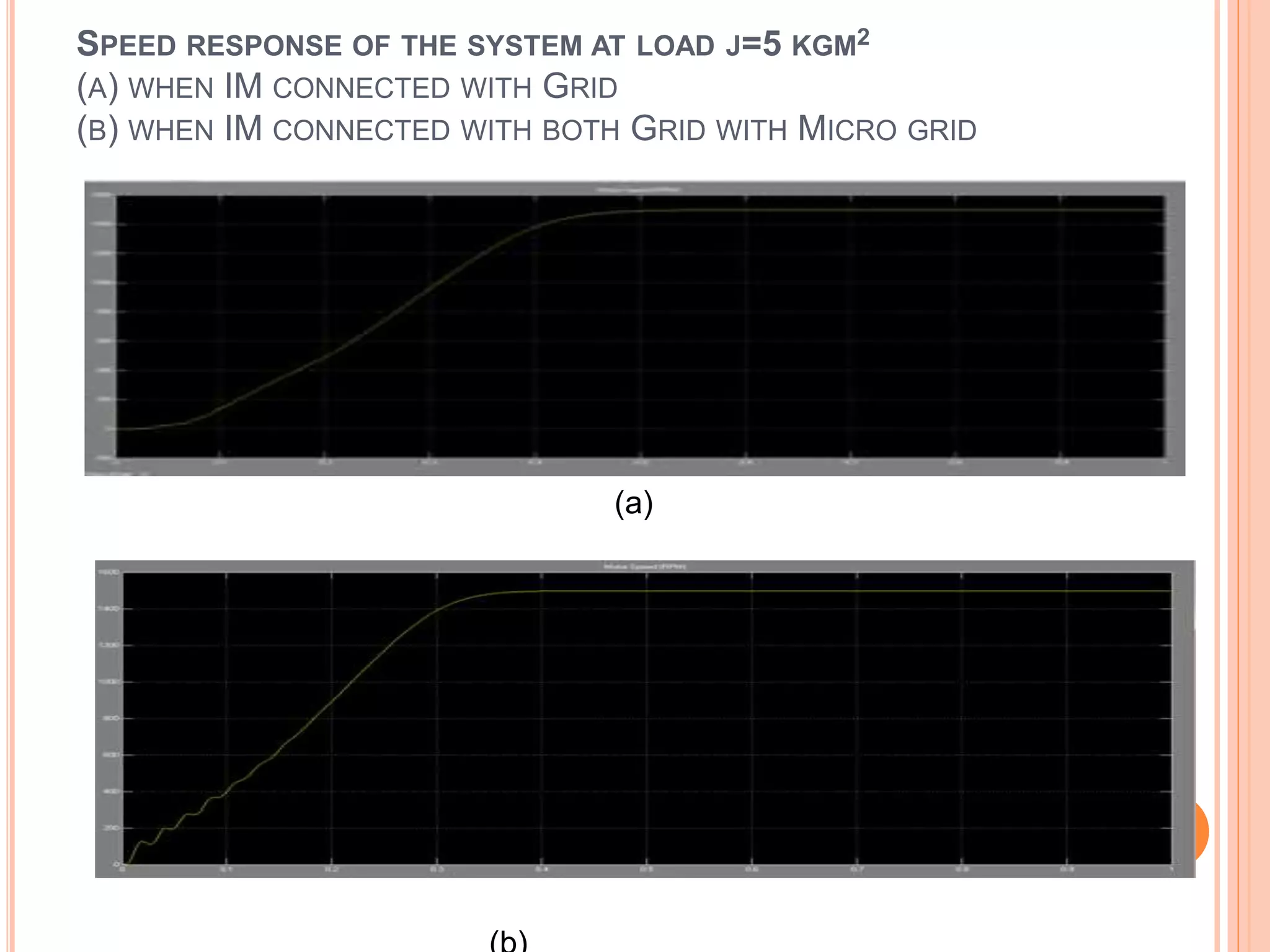
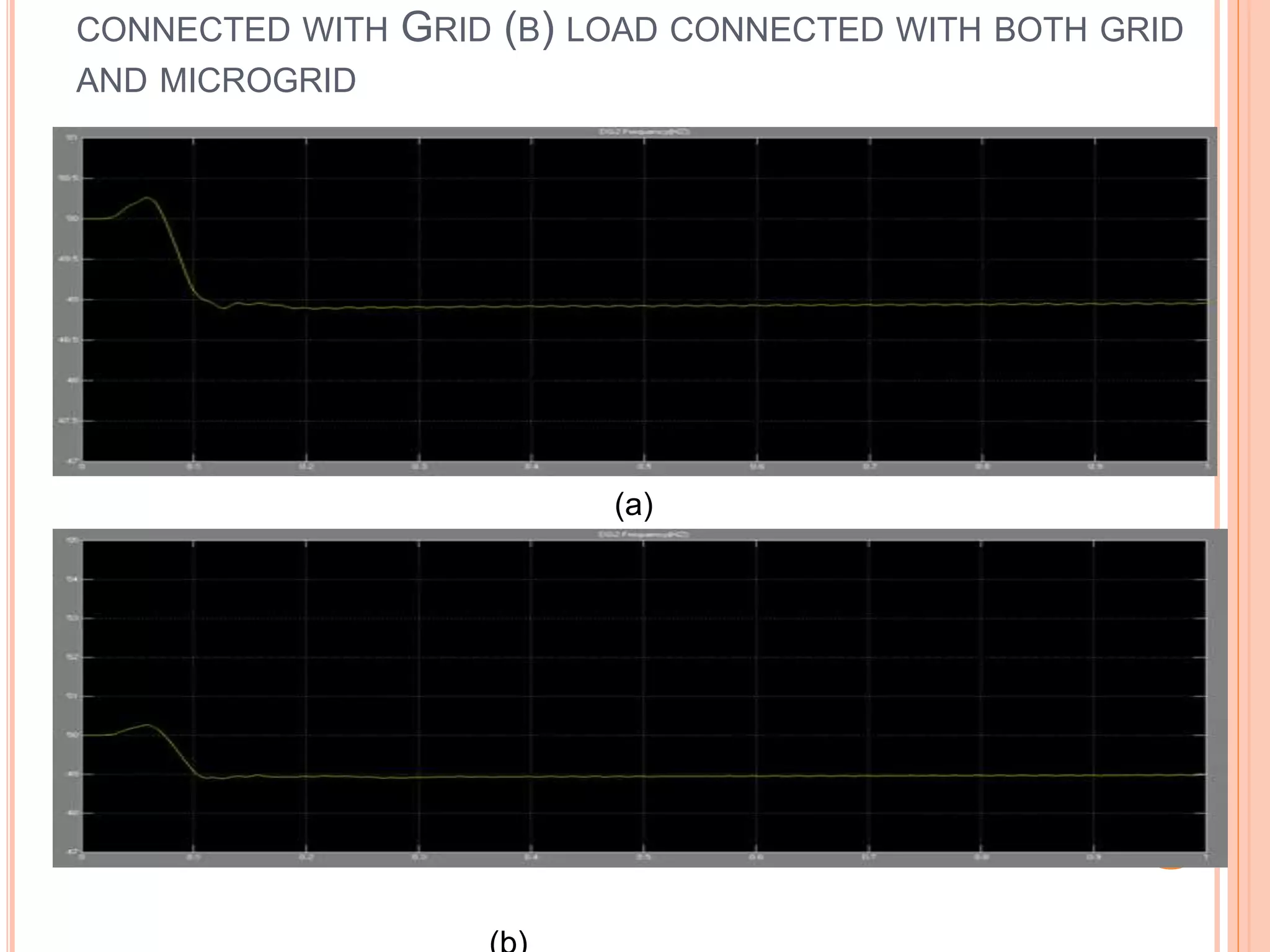
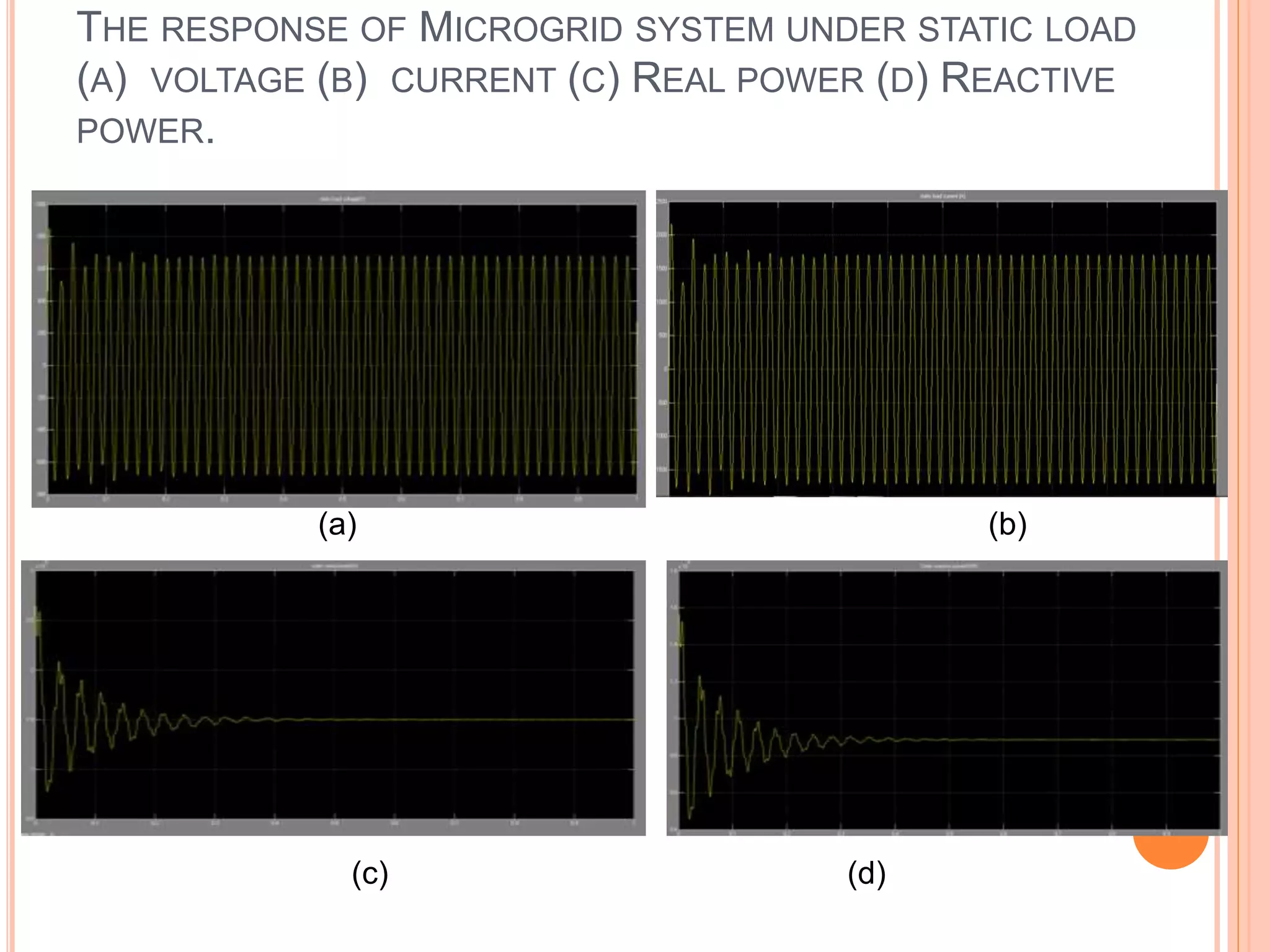
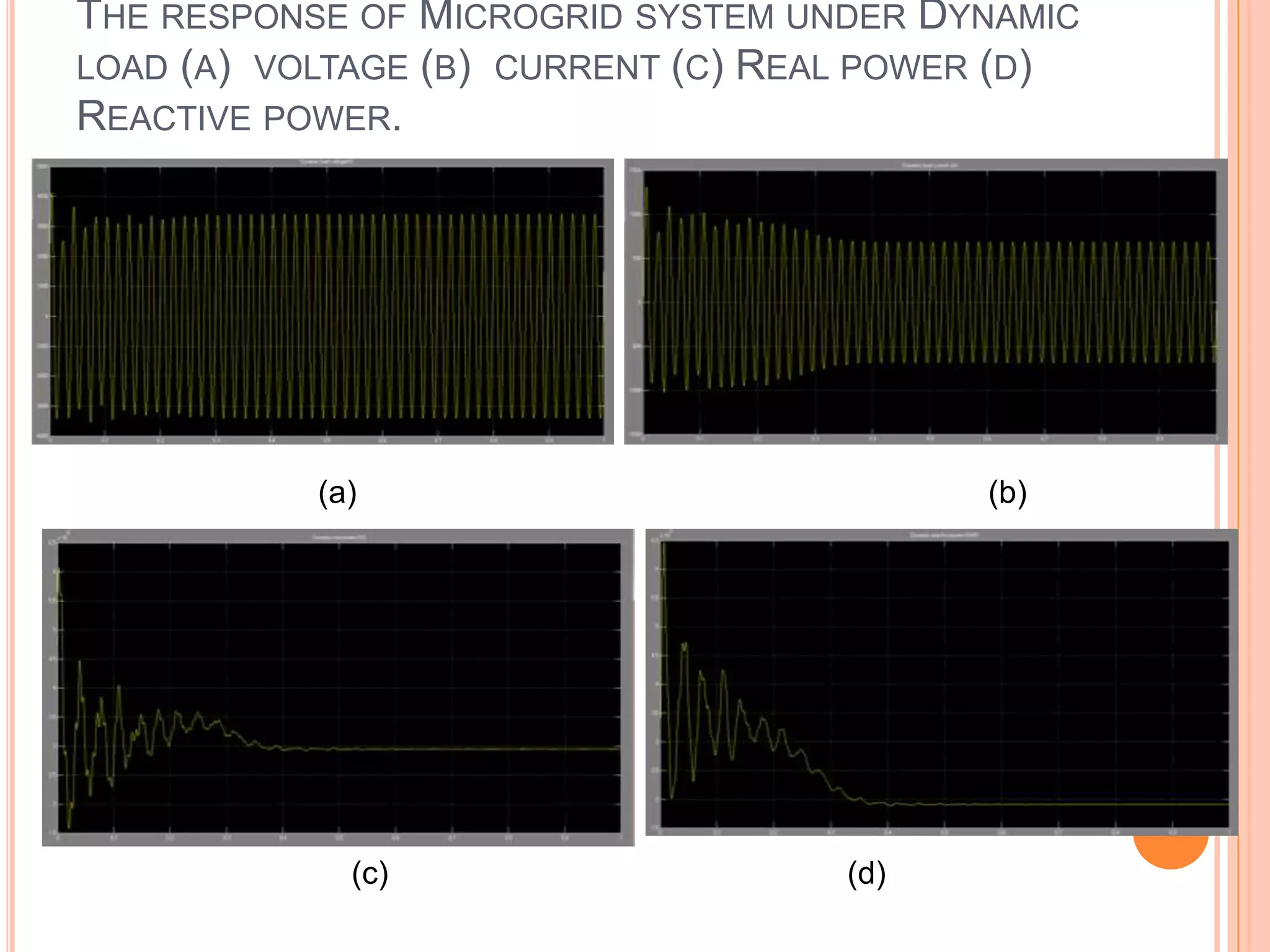
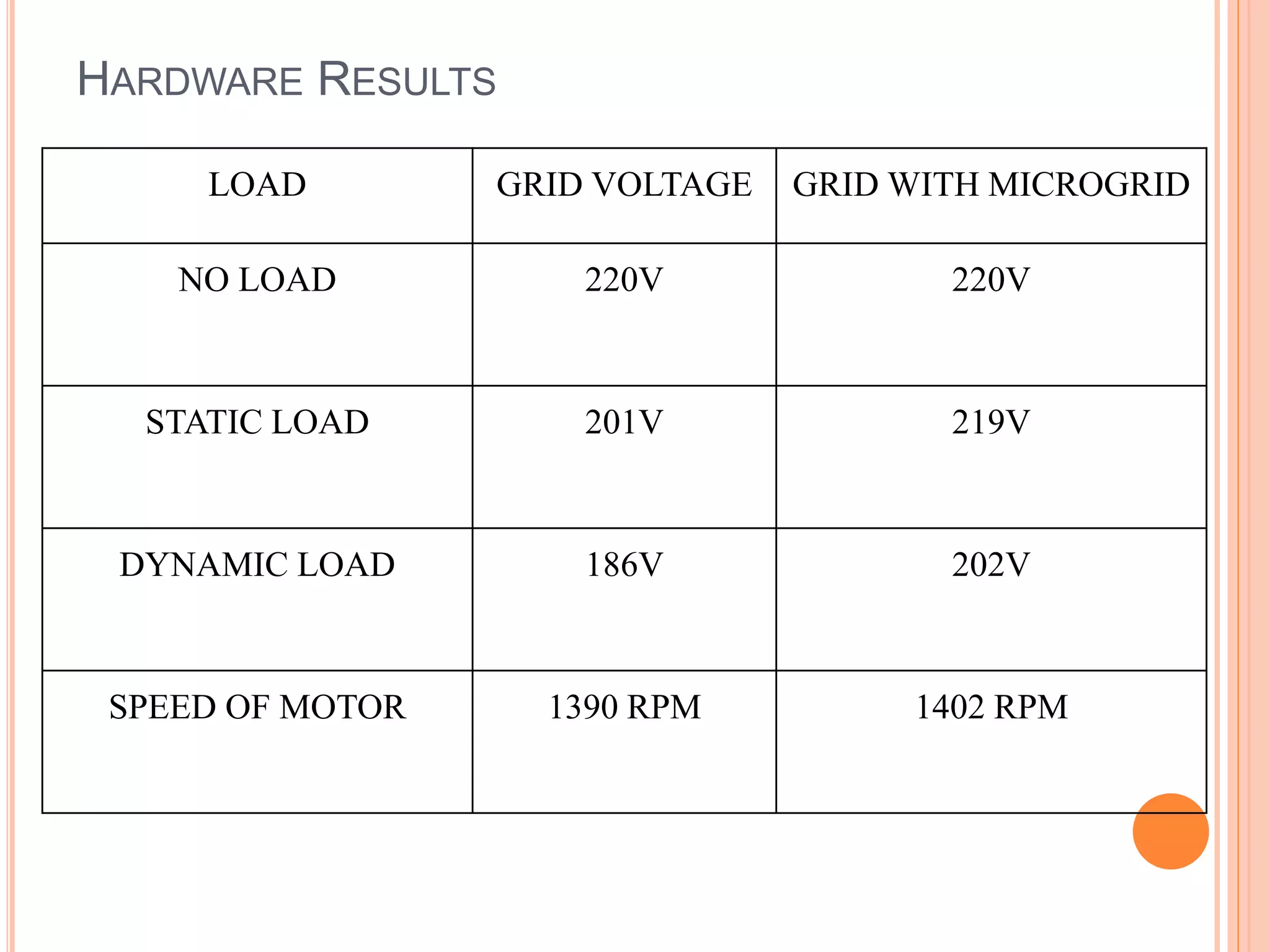

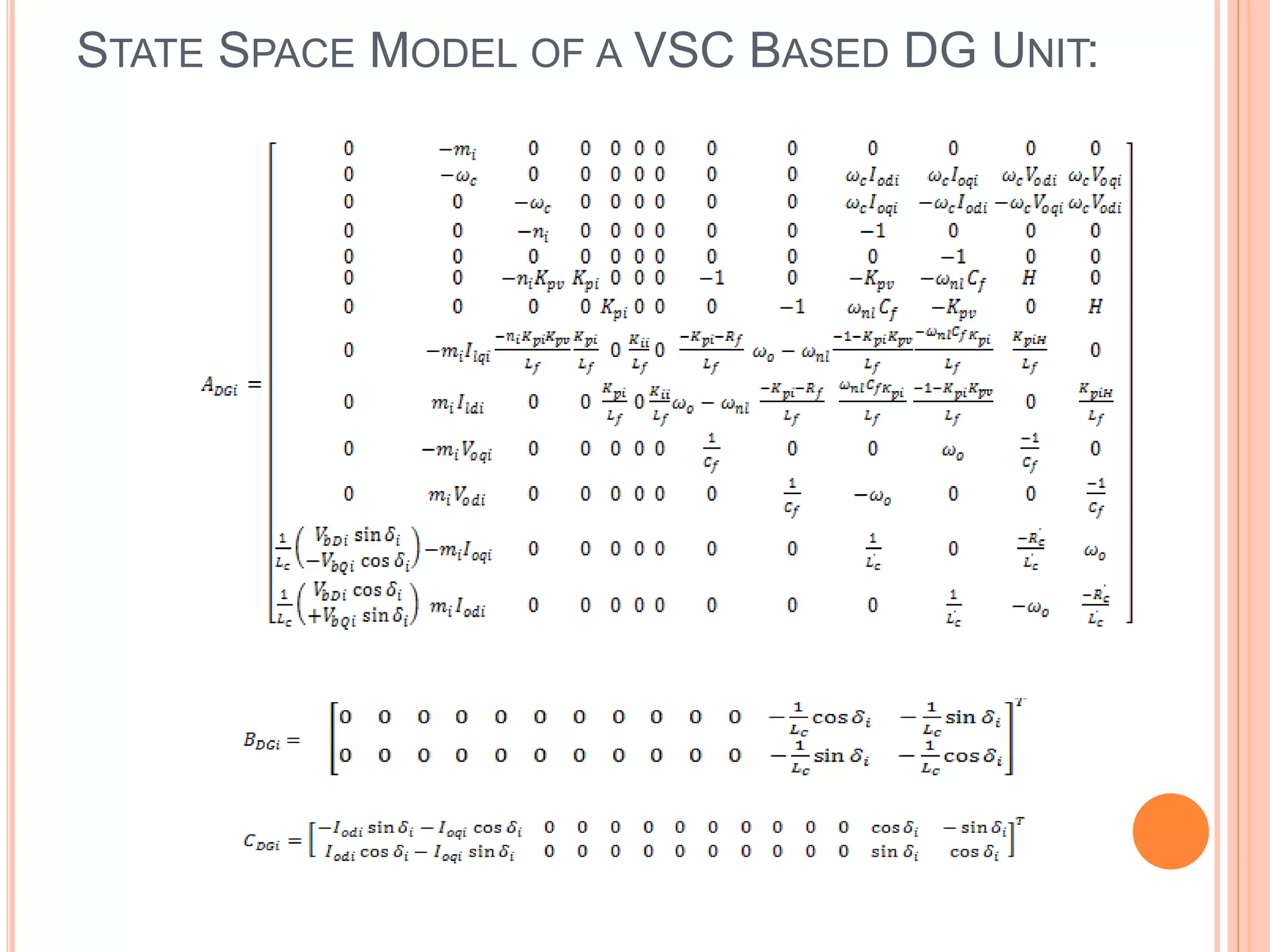
This document presents an analysis of low frequency oscillations in autonomous microgrids driven by dynamic loads, emphasizing the importance of effective control strategies to stabilize system performance. It introduces a two degree of freedom active damping controller designed to mitigate oscillatory dynamics while enhancing power quality and reliability. The findings highlight the significant impact of induction motor loads on microgrid stability and the proposed strategies improve operational efficiency across varying conditions.













































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)

















