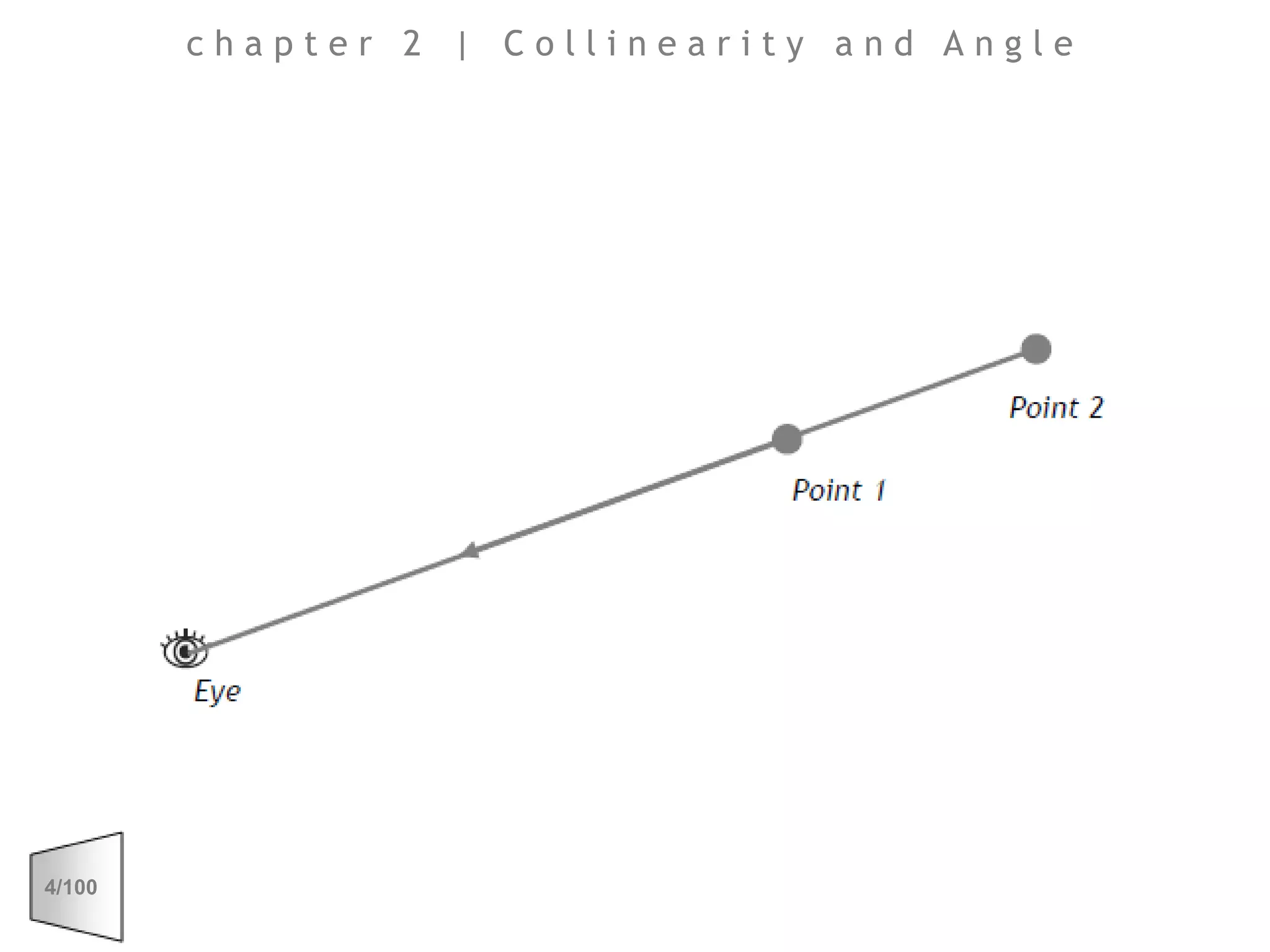
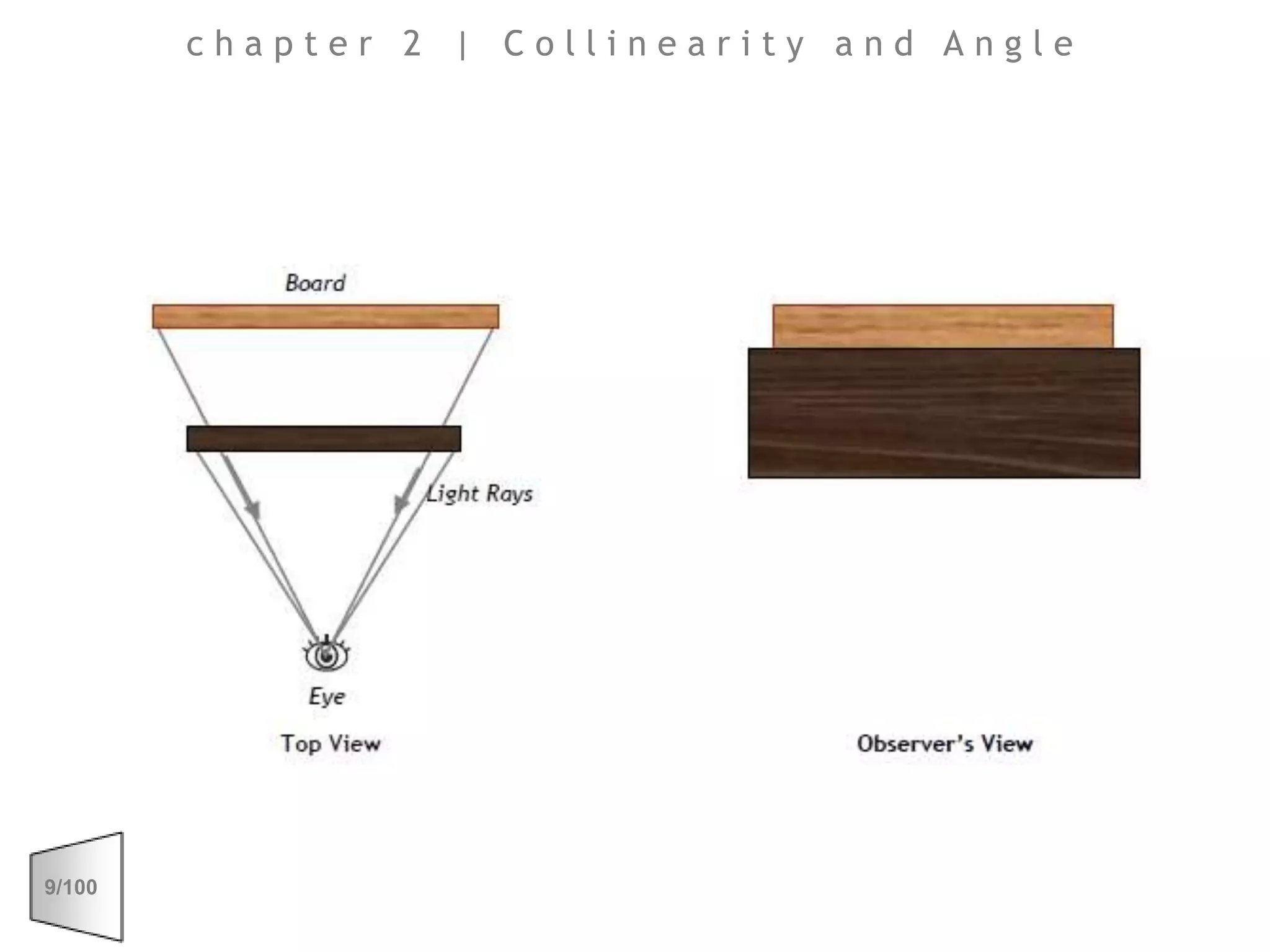
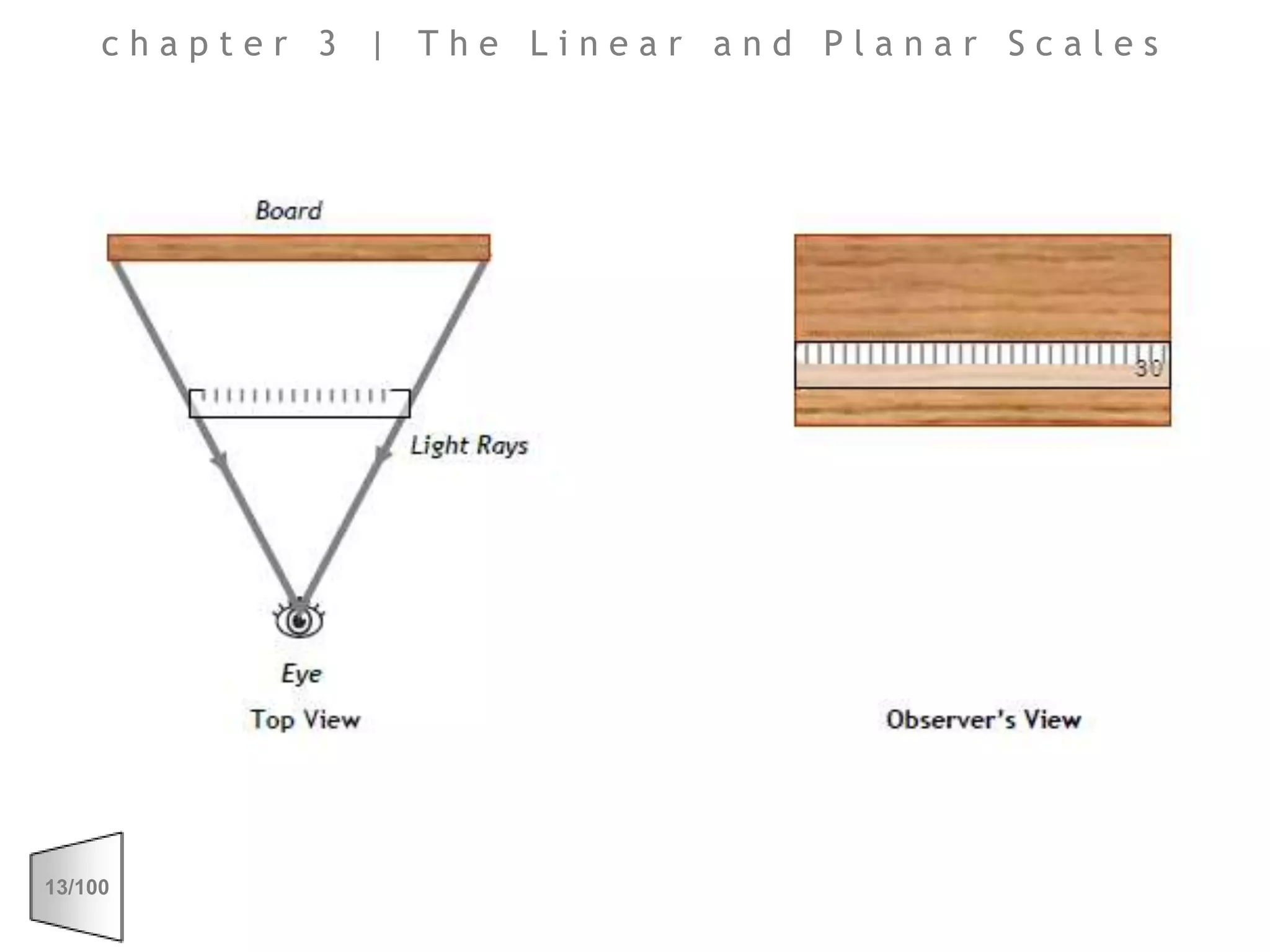
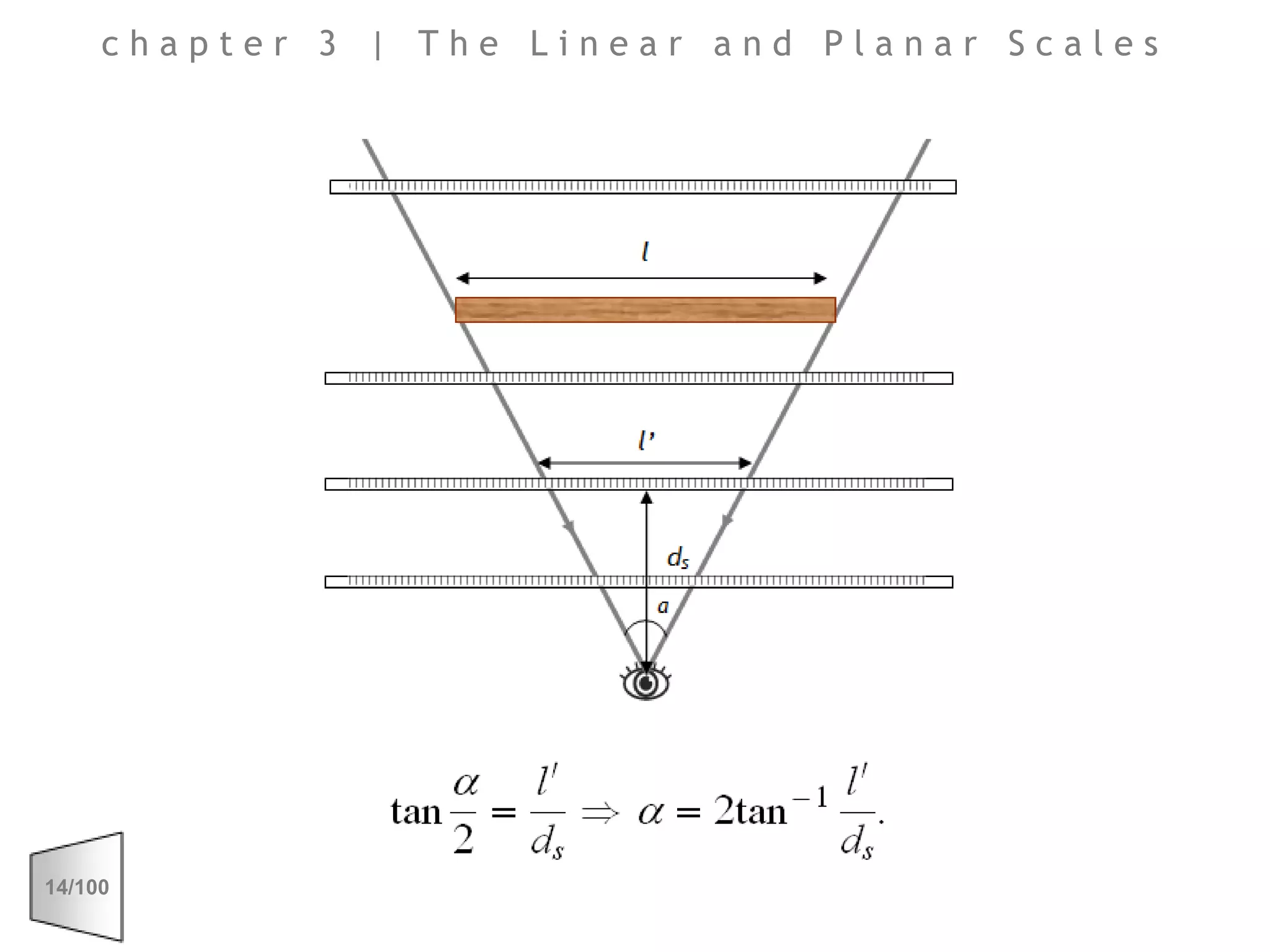
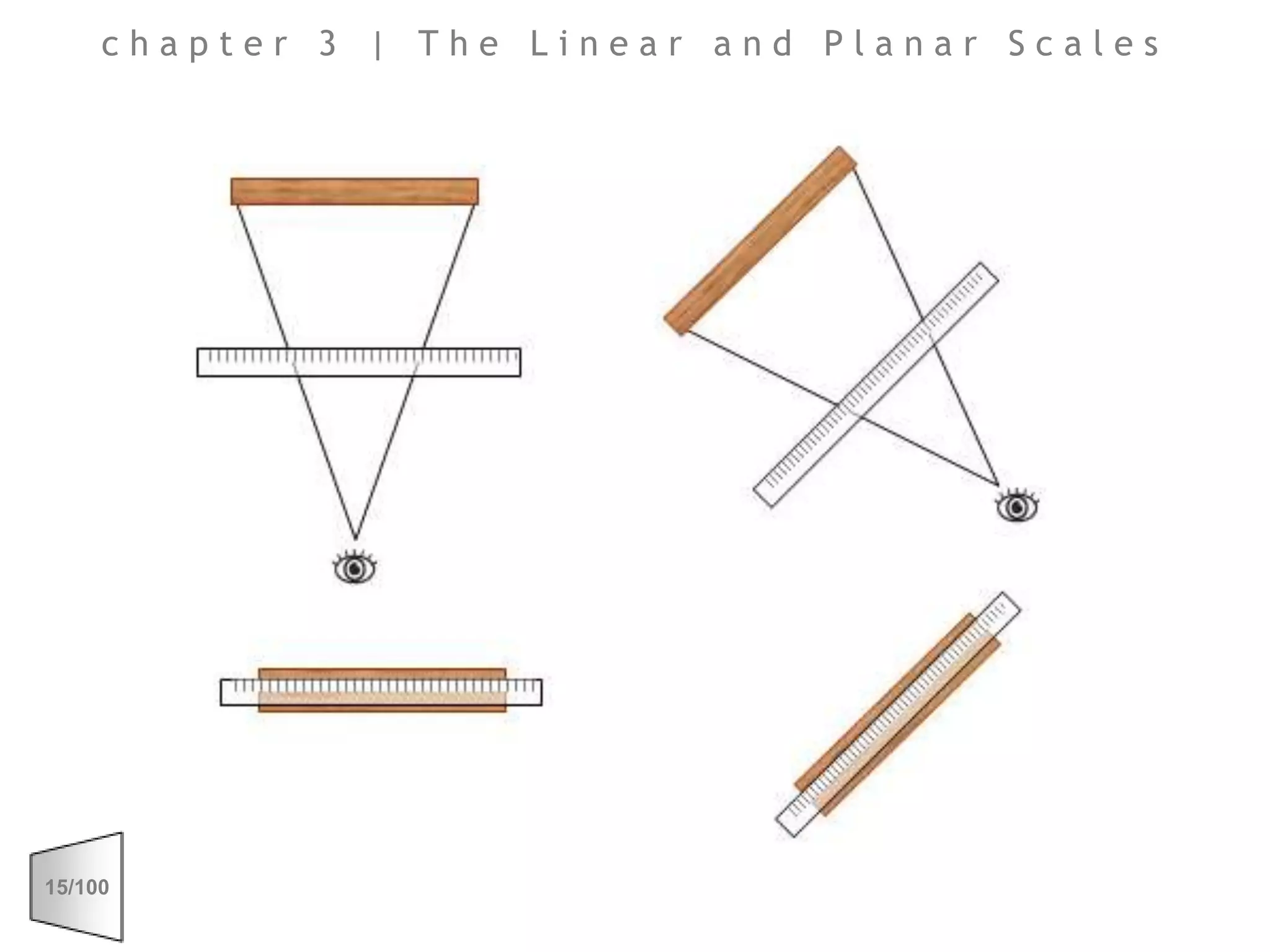
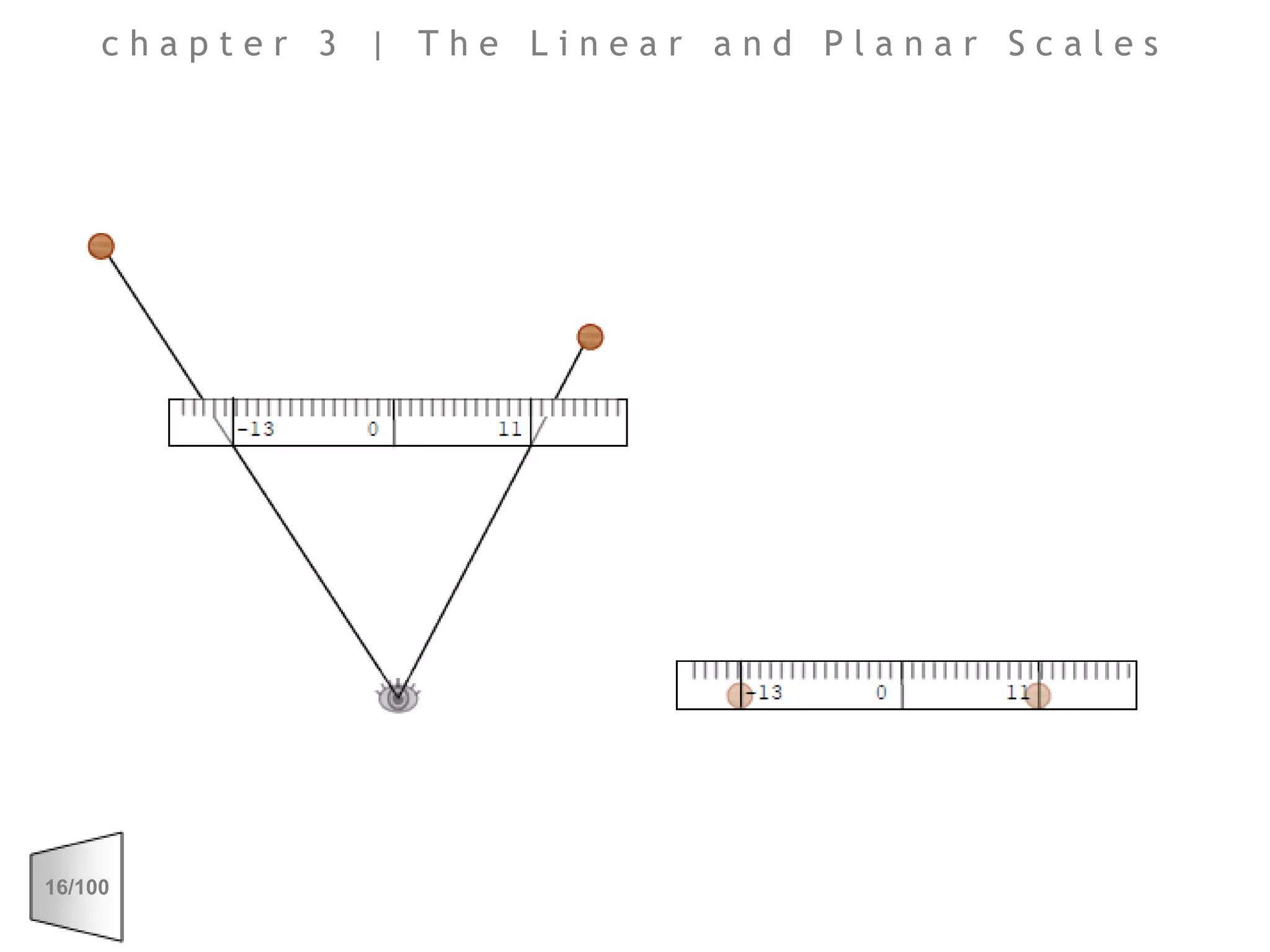
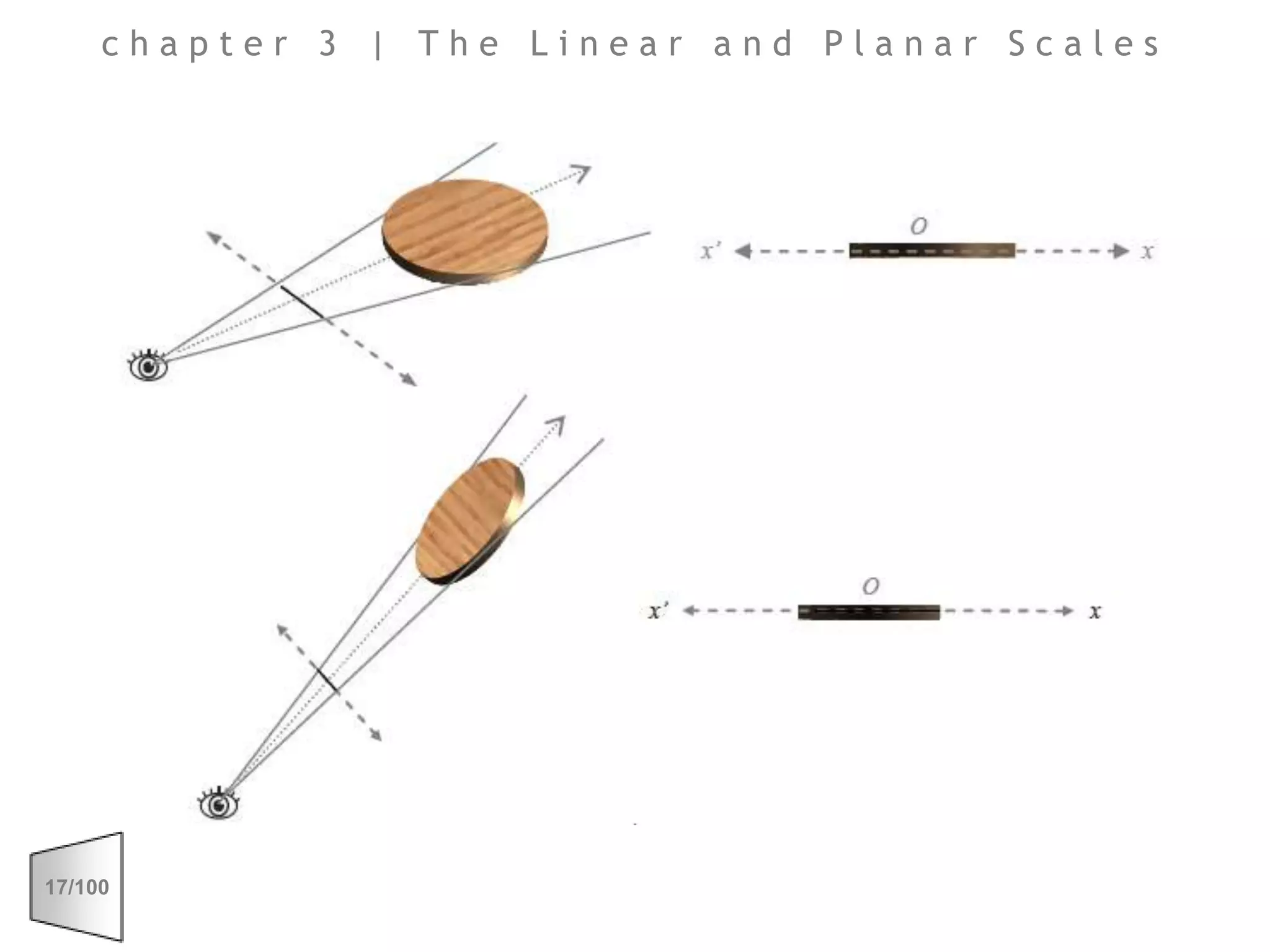
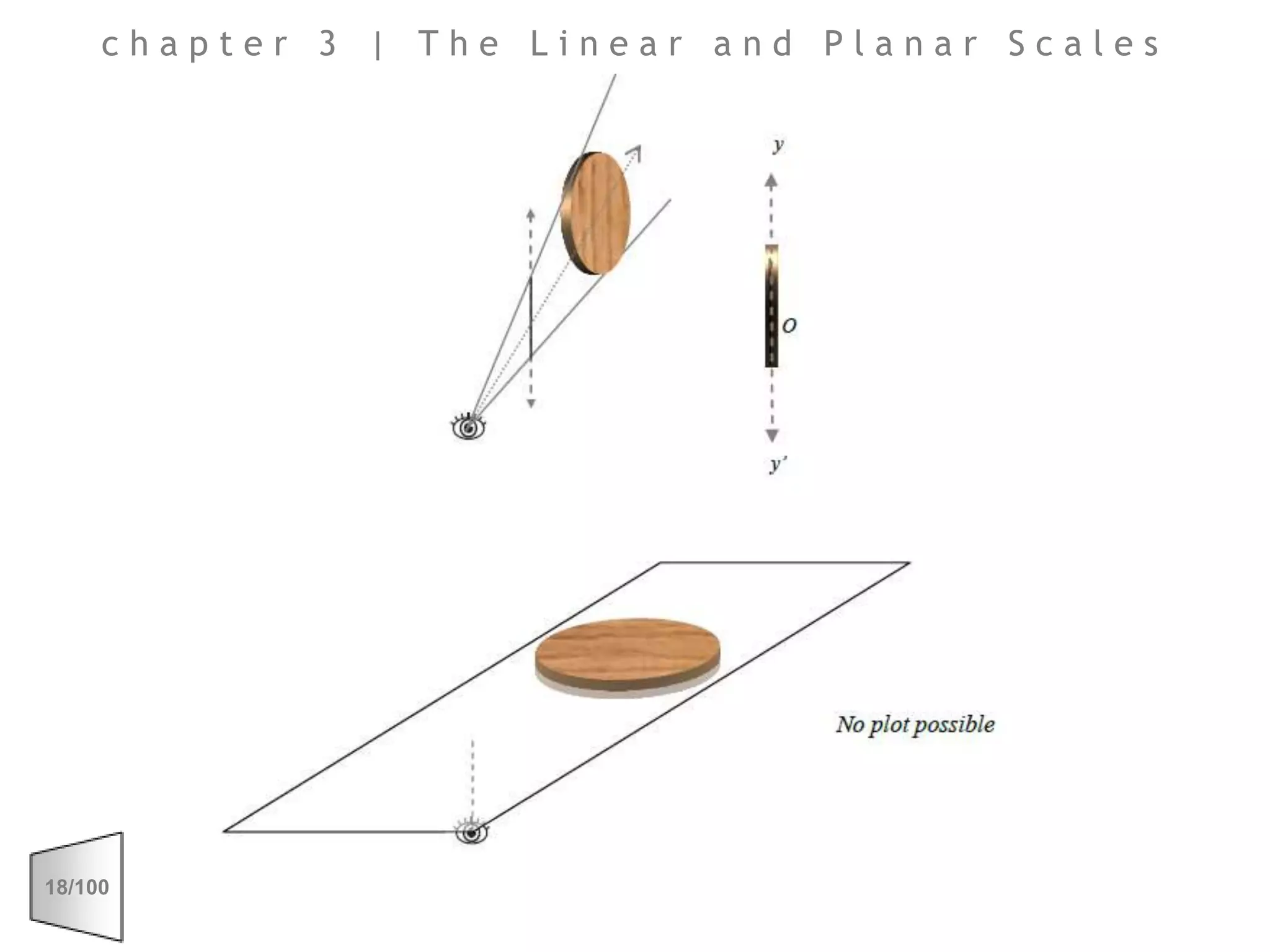
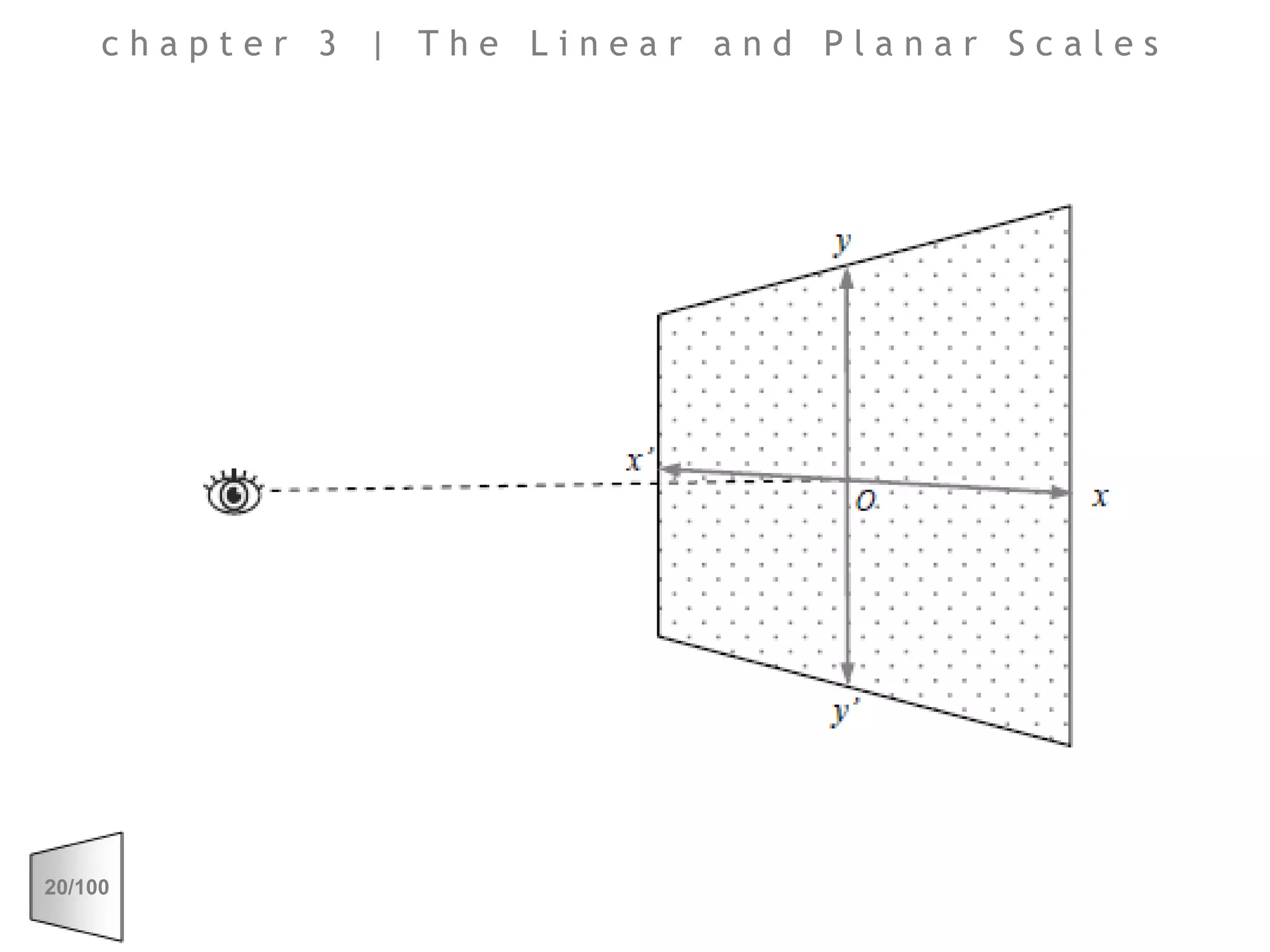
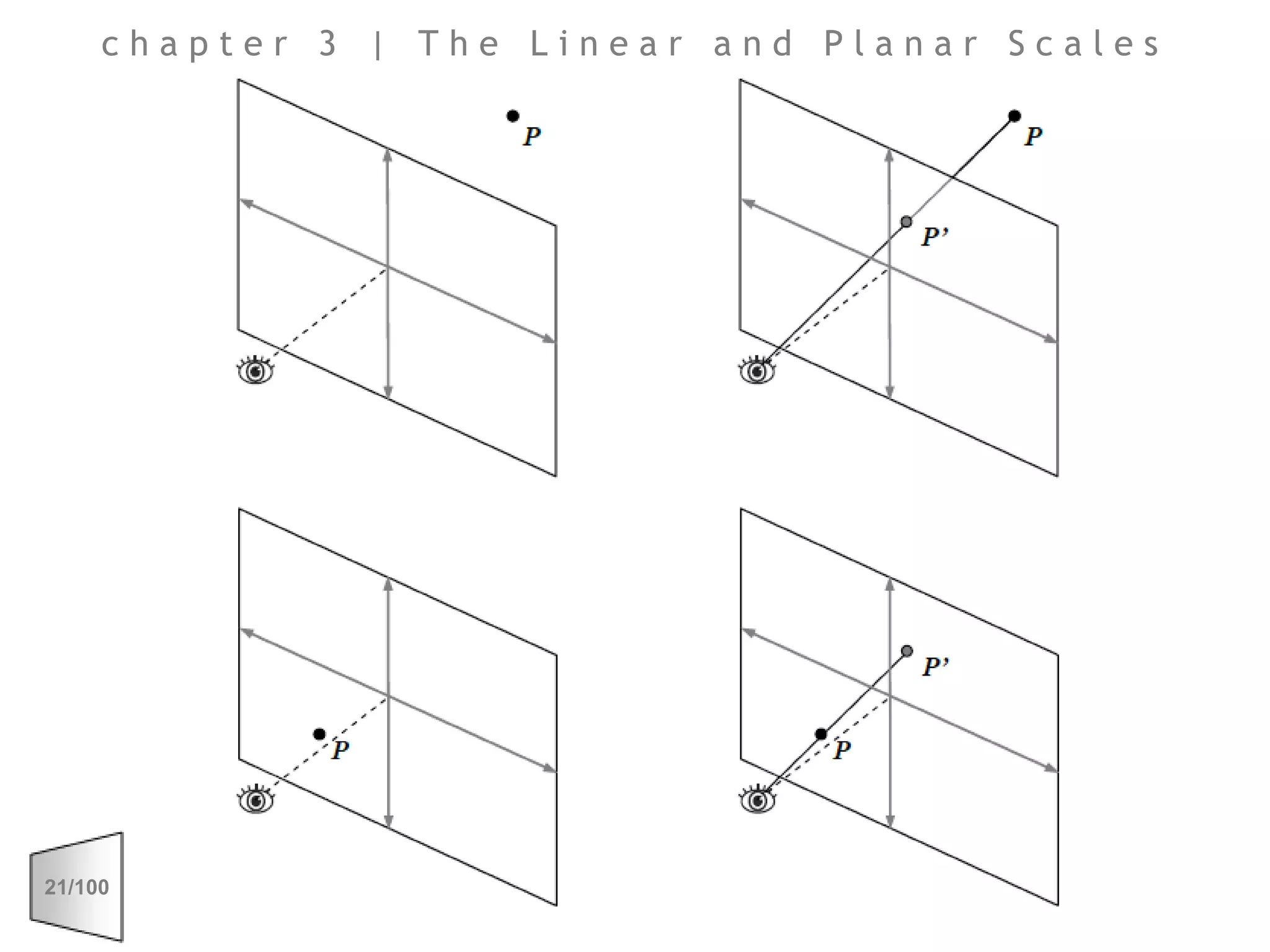
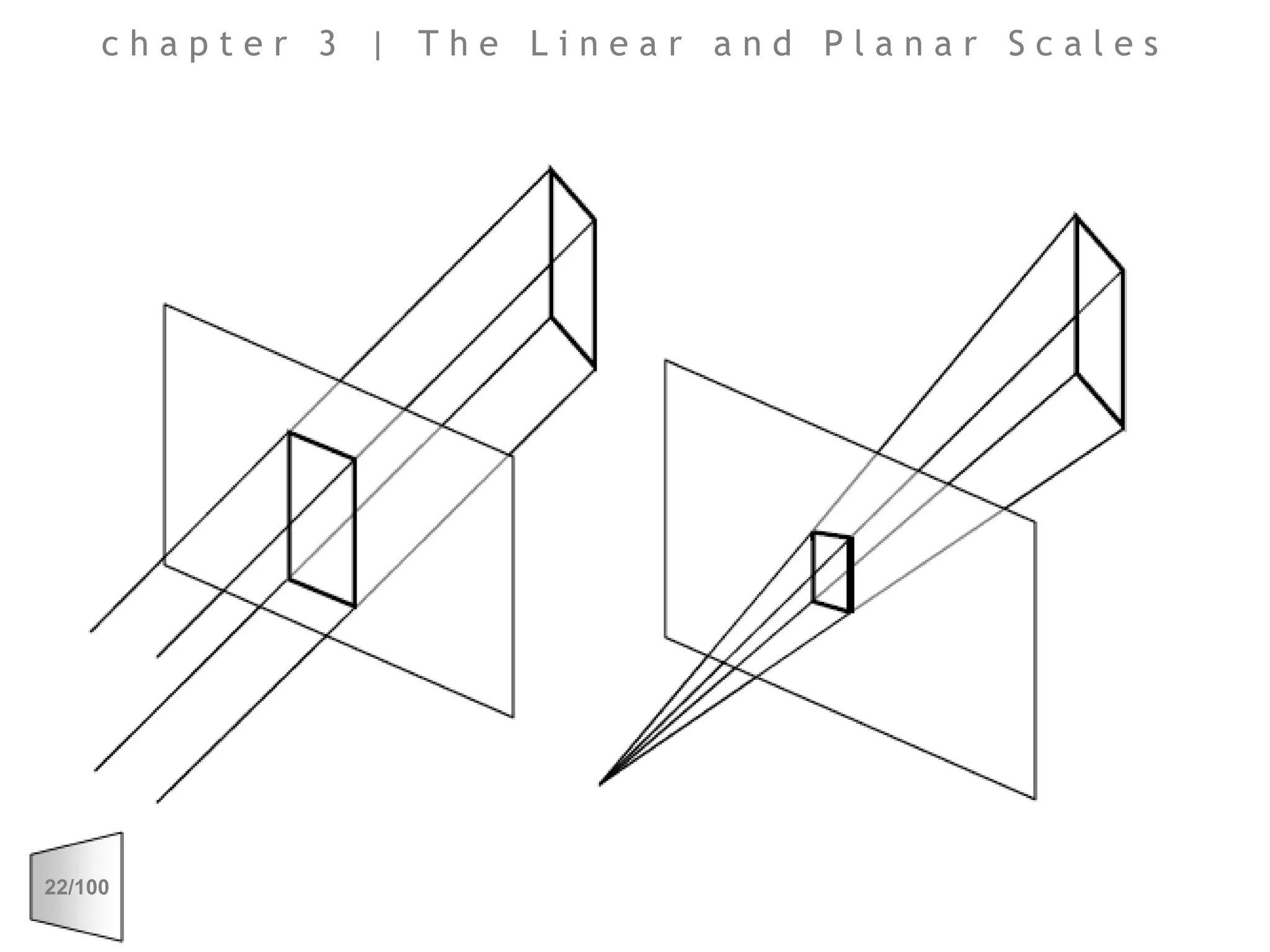
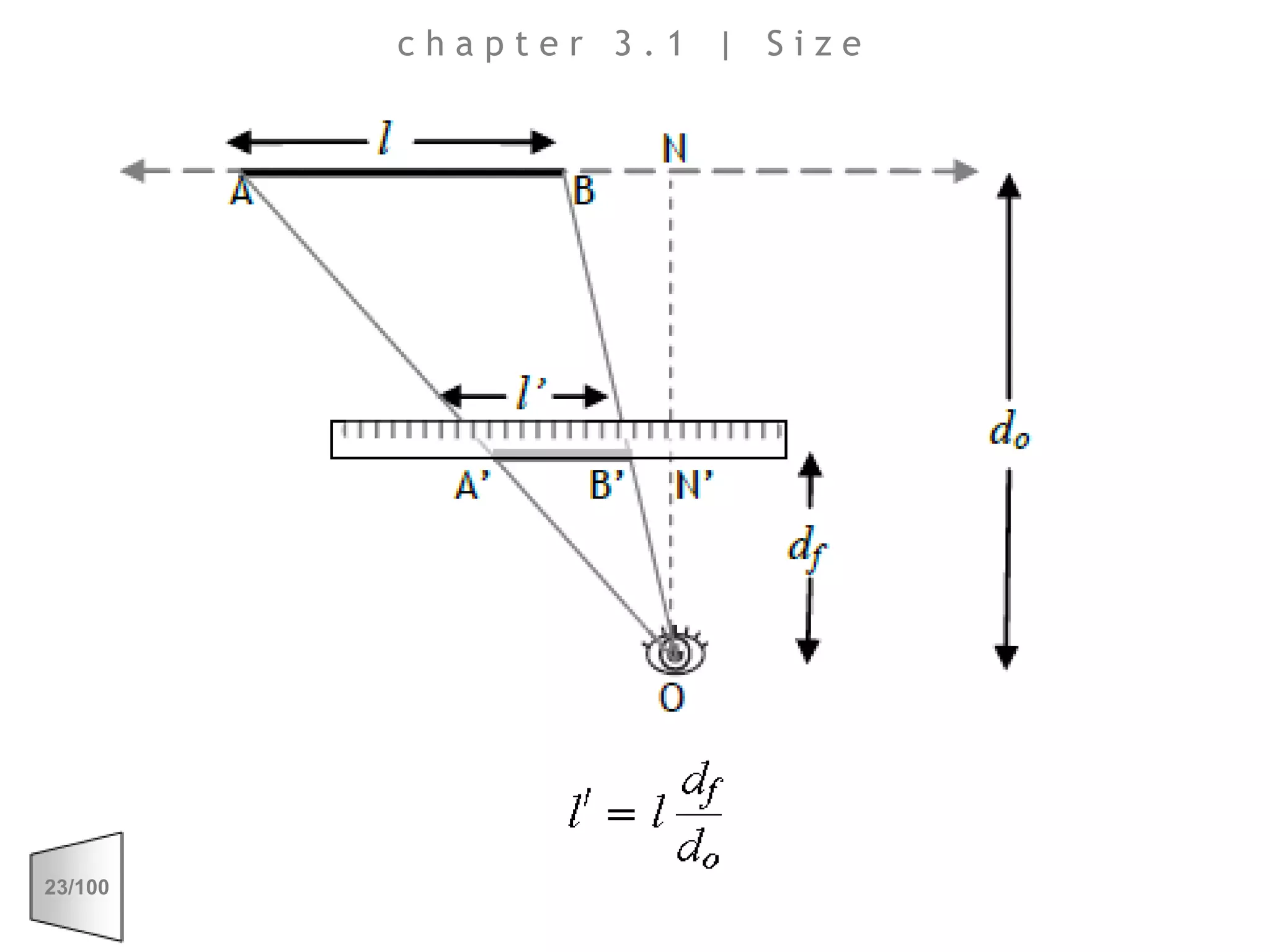
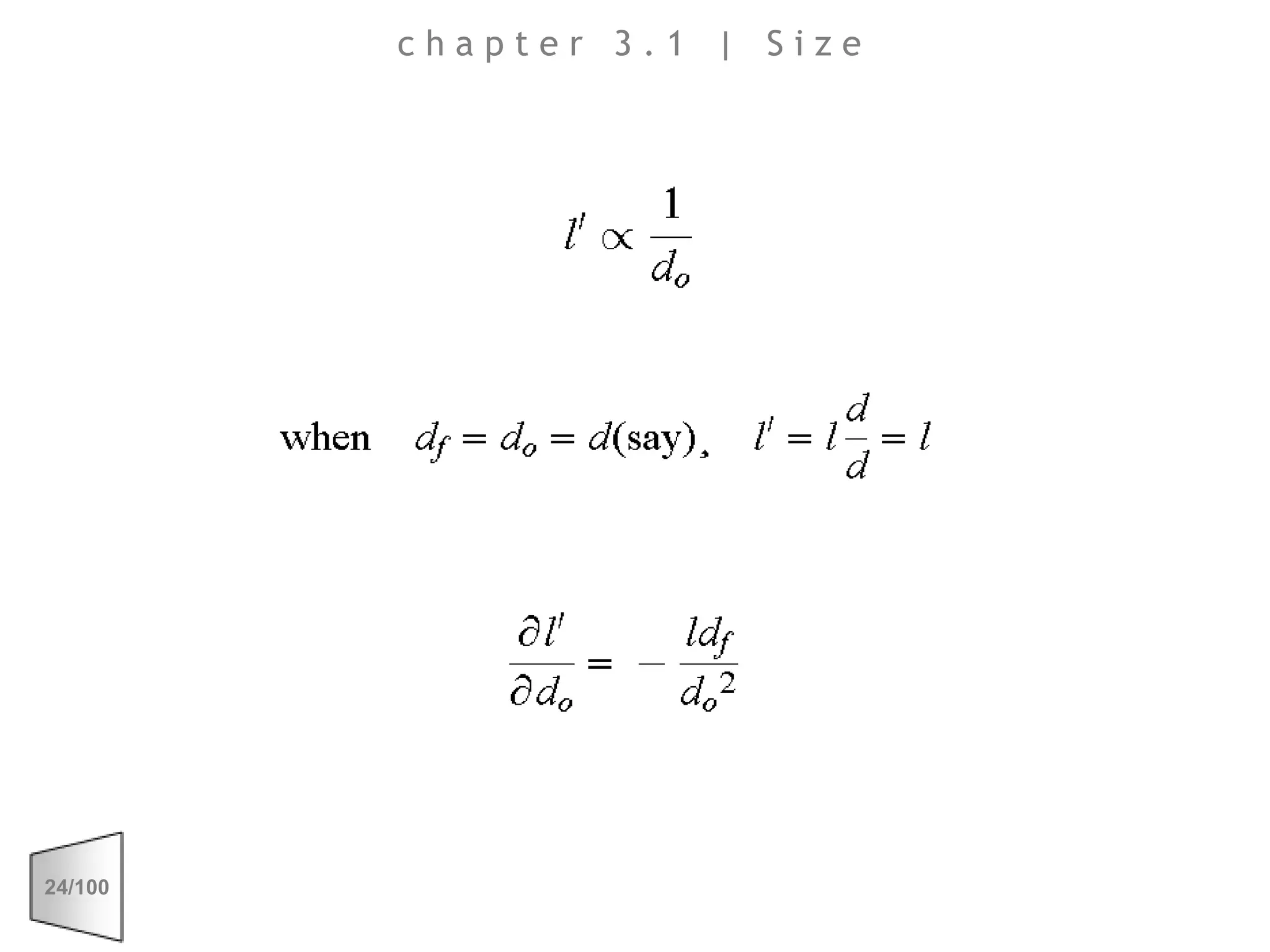
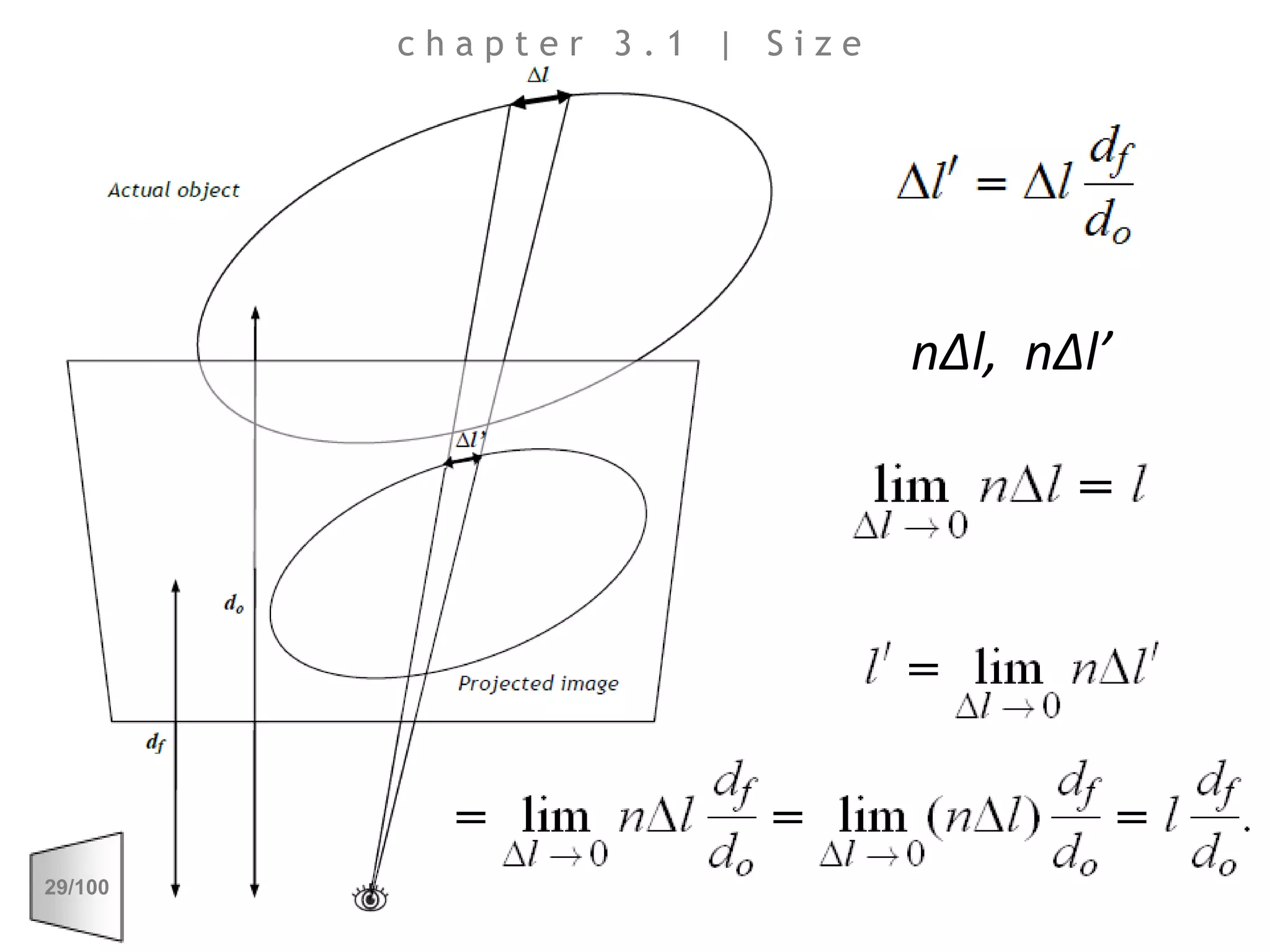
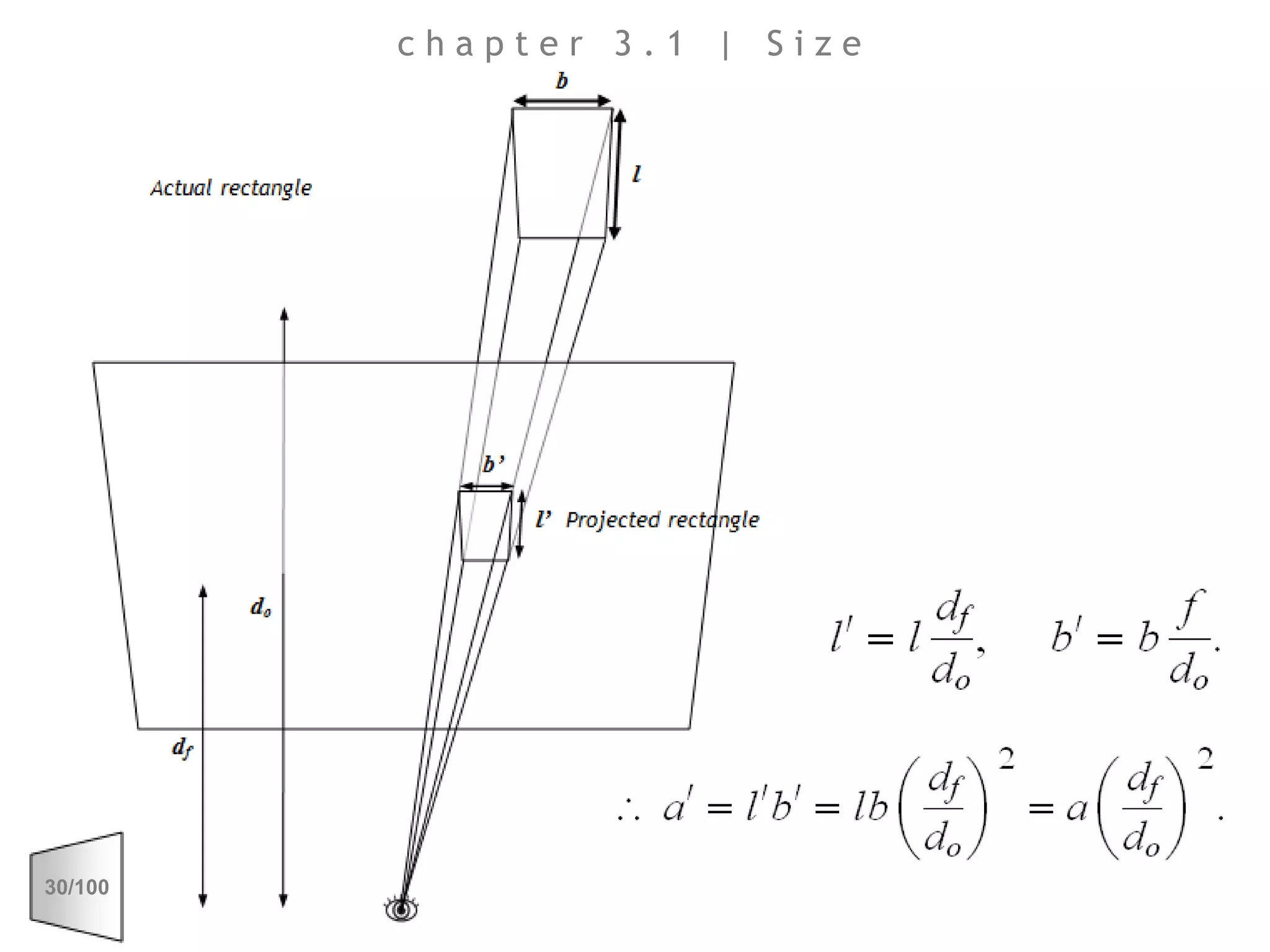
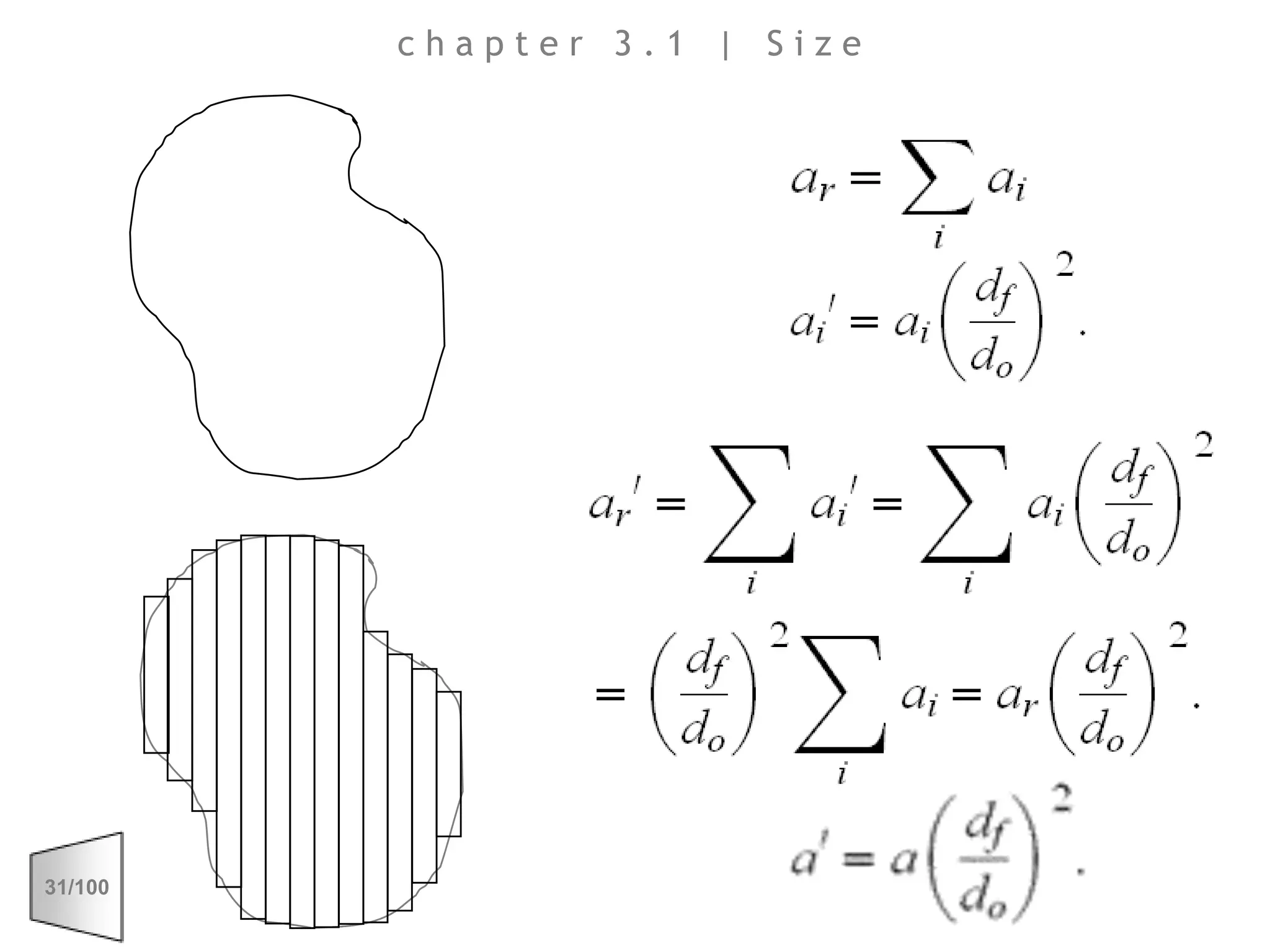
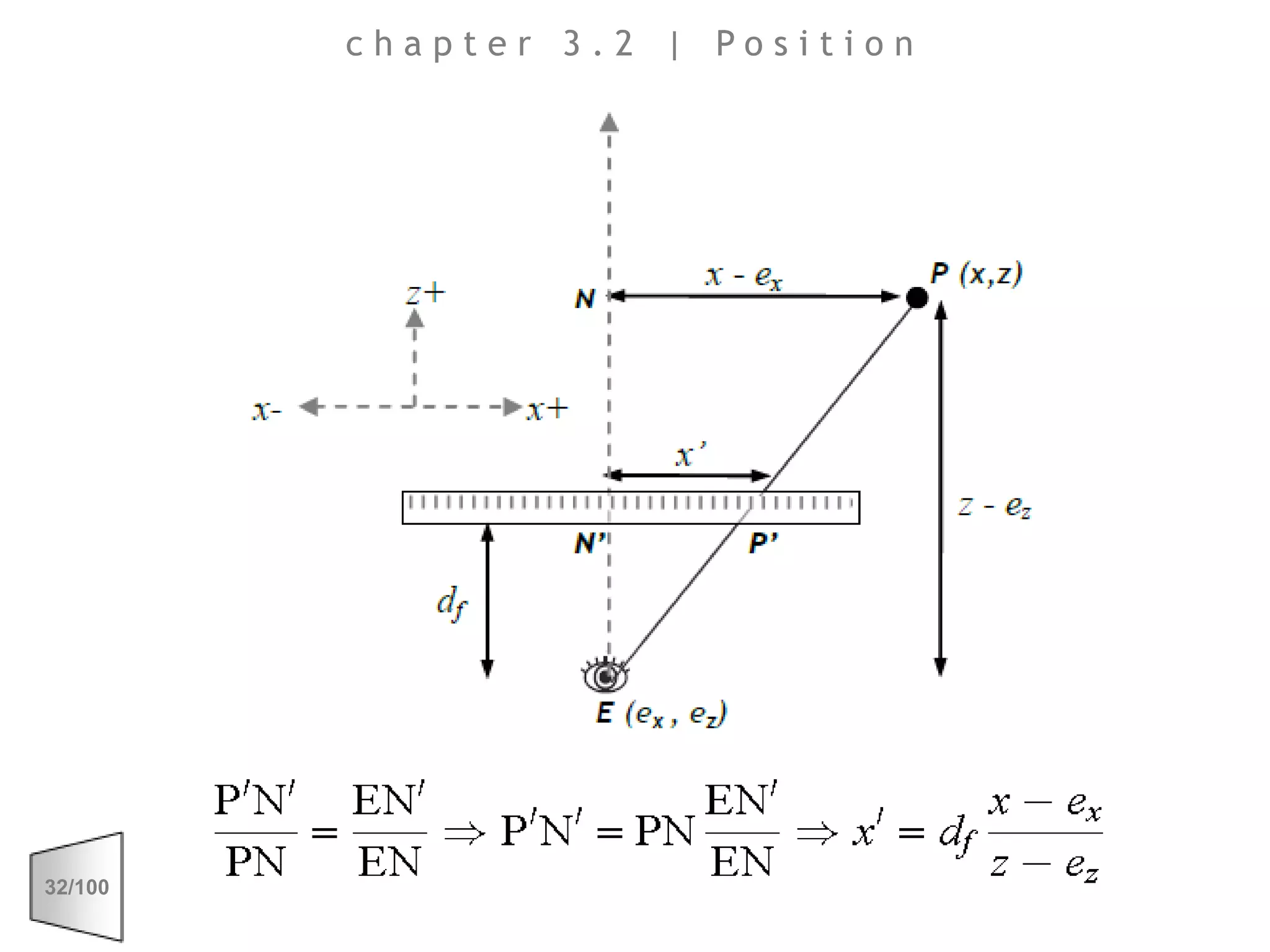
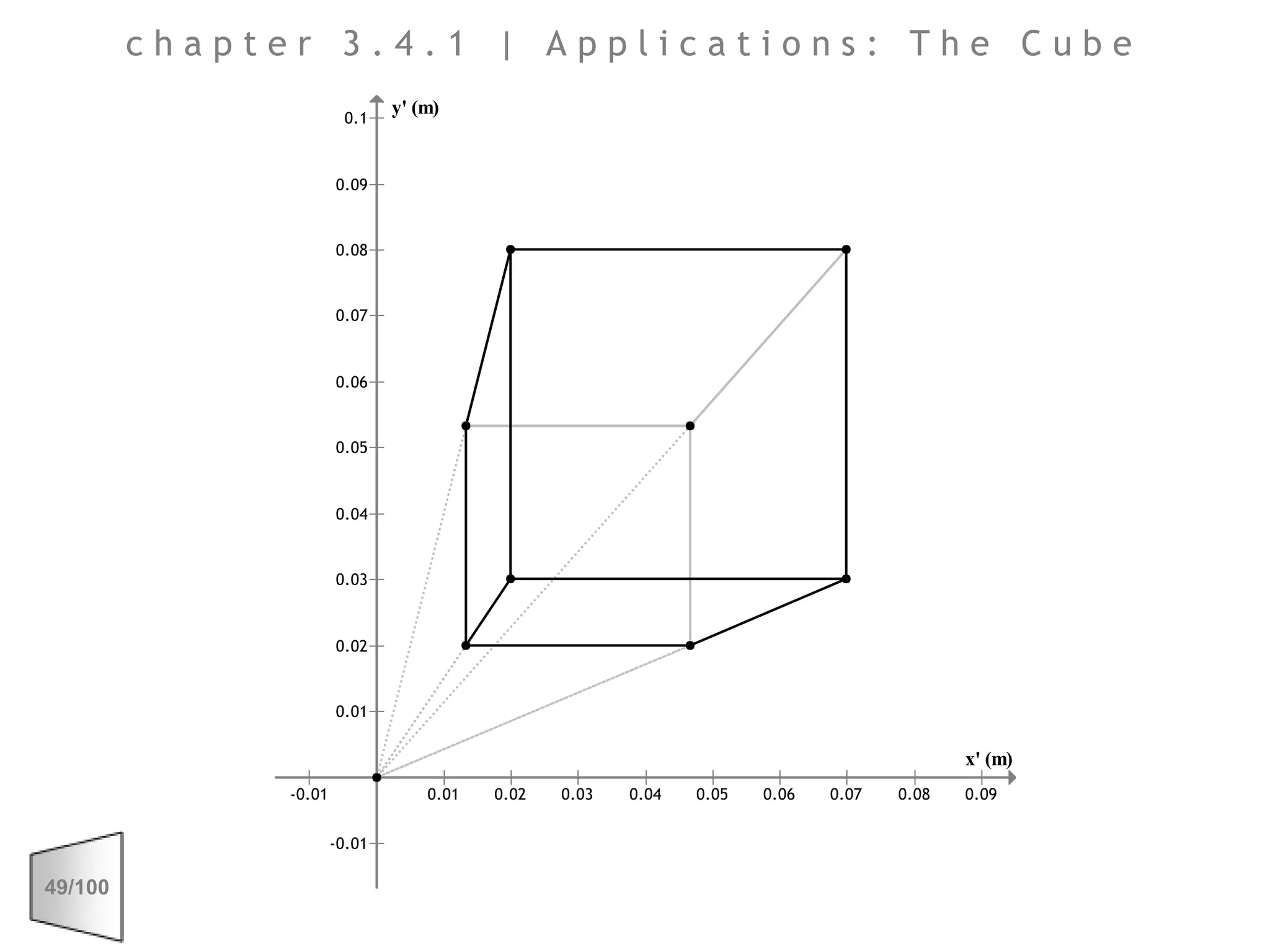
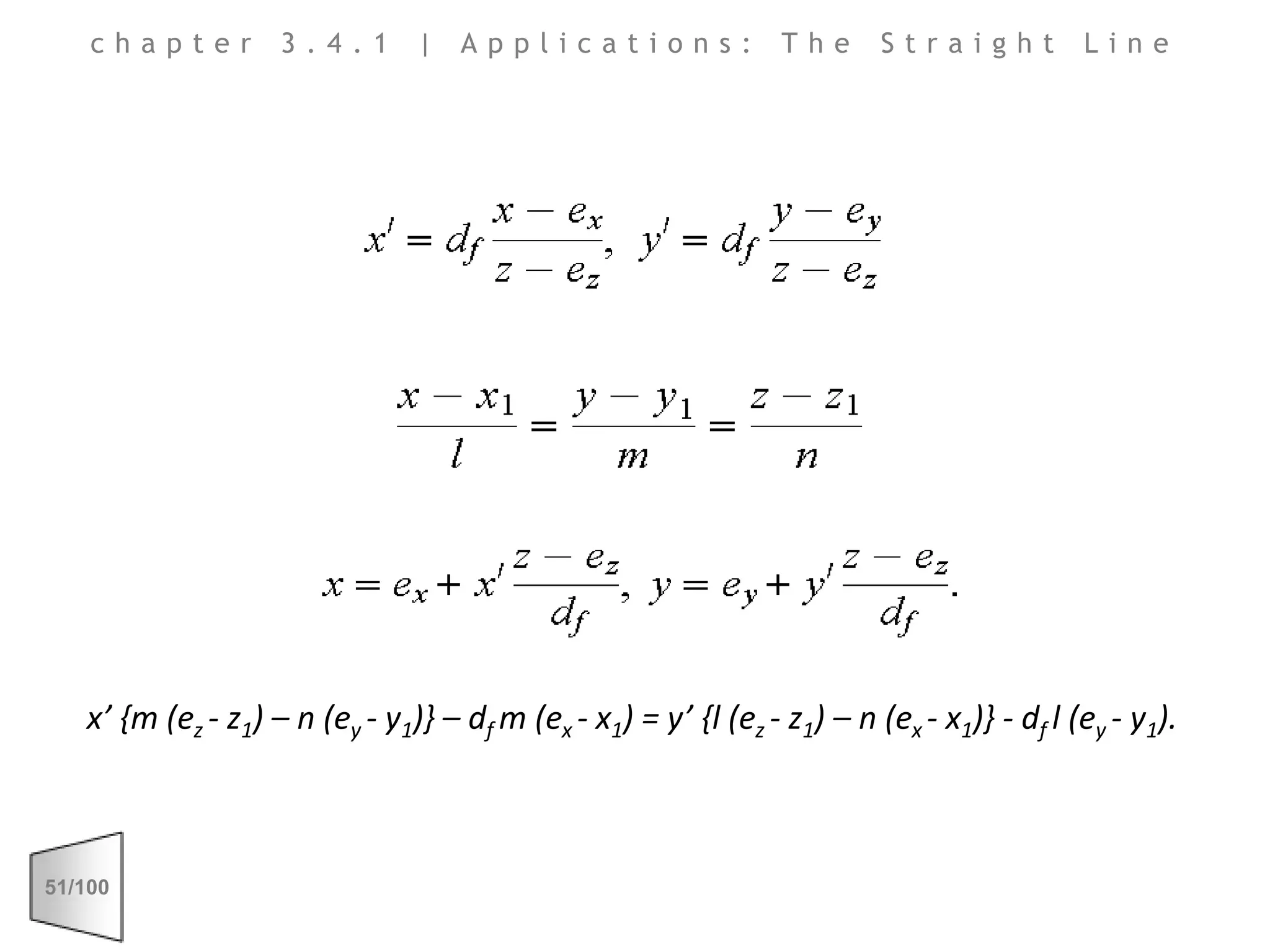
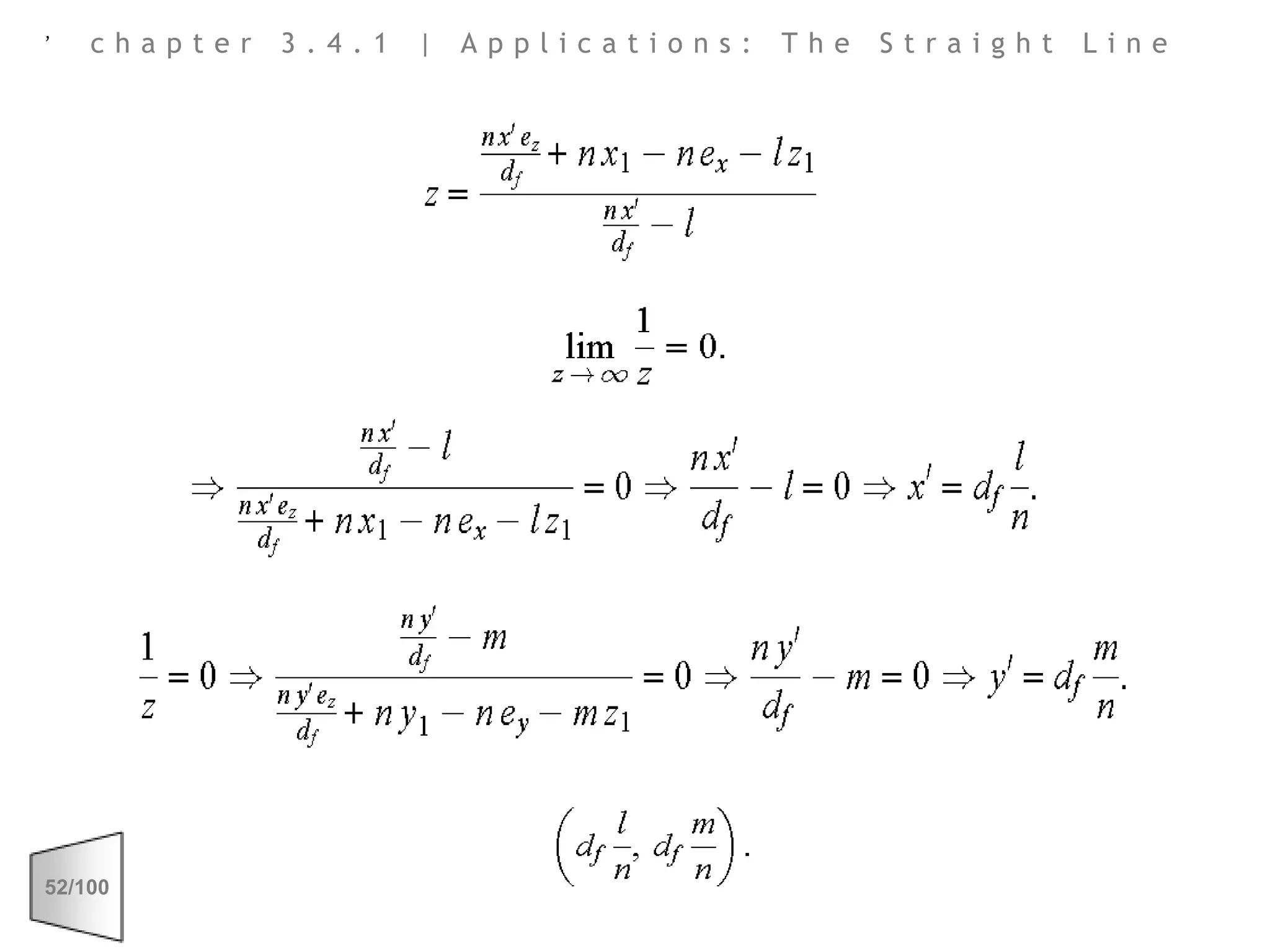
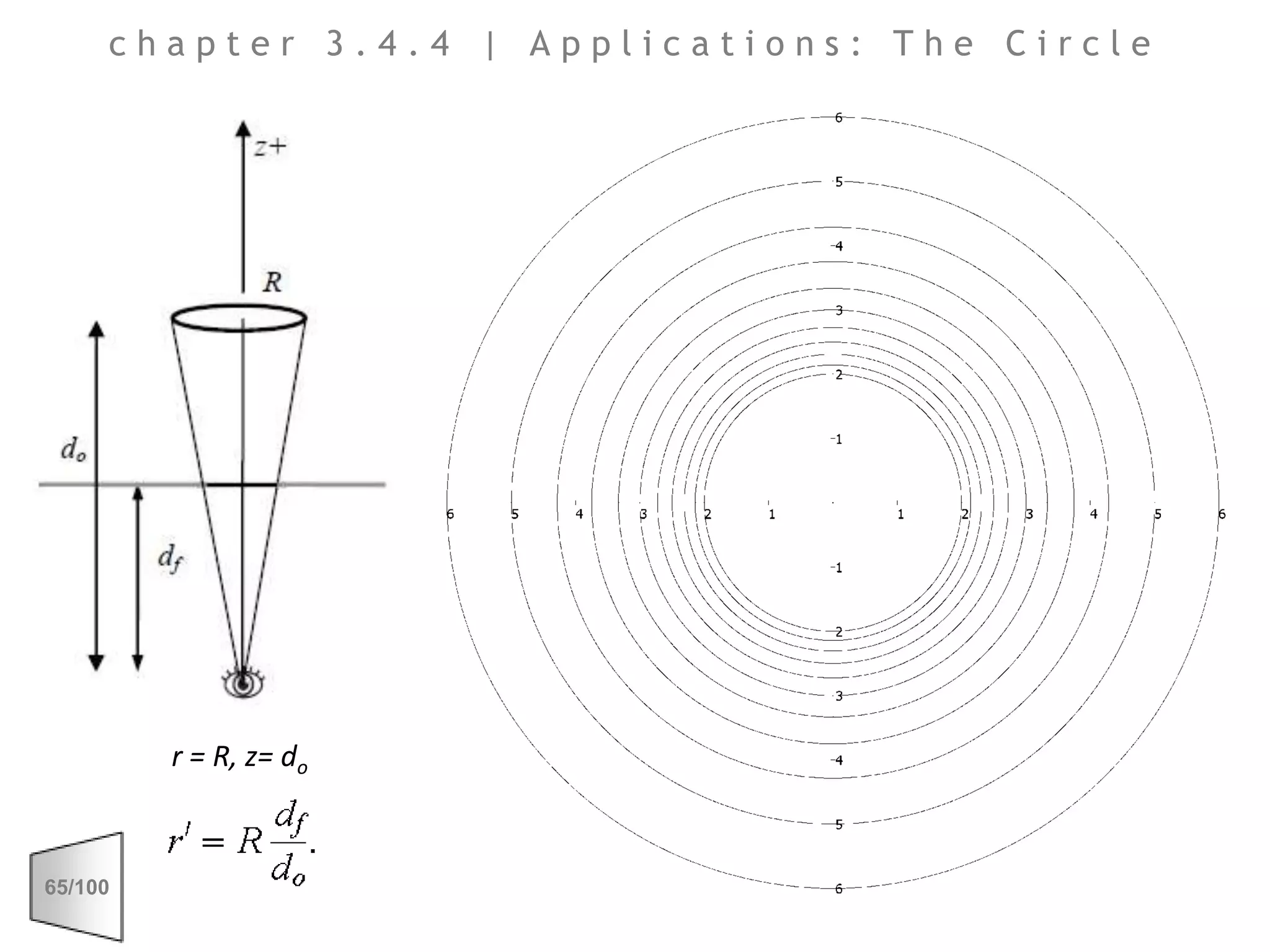
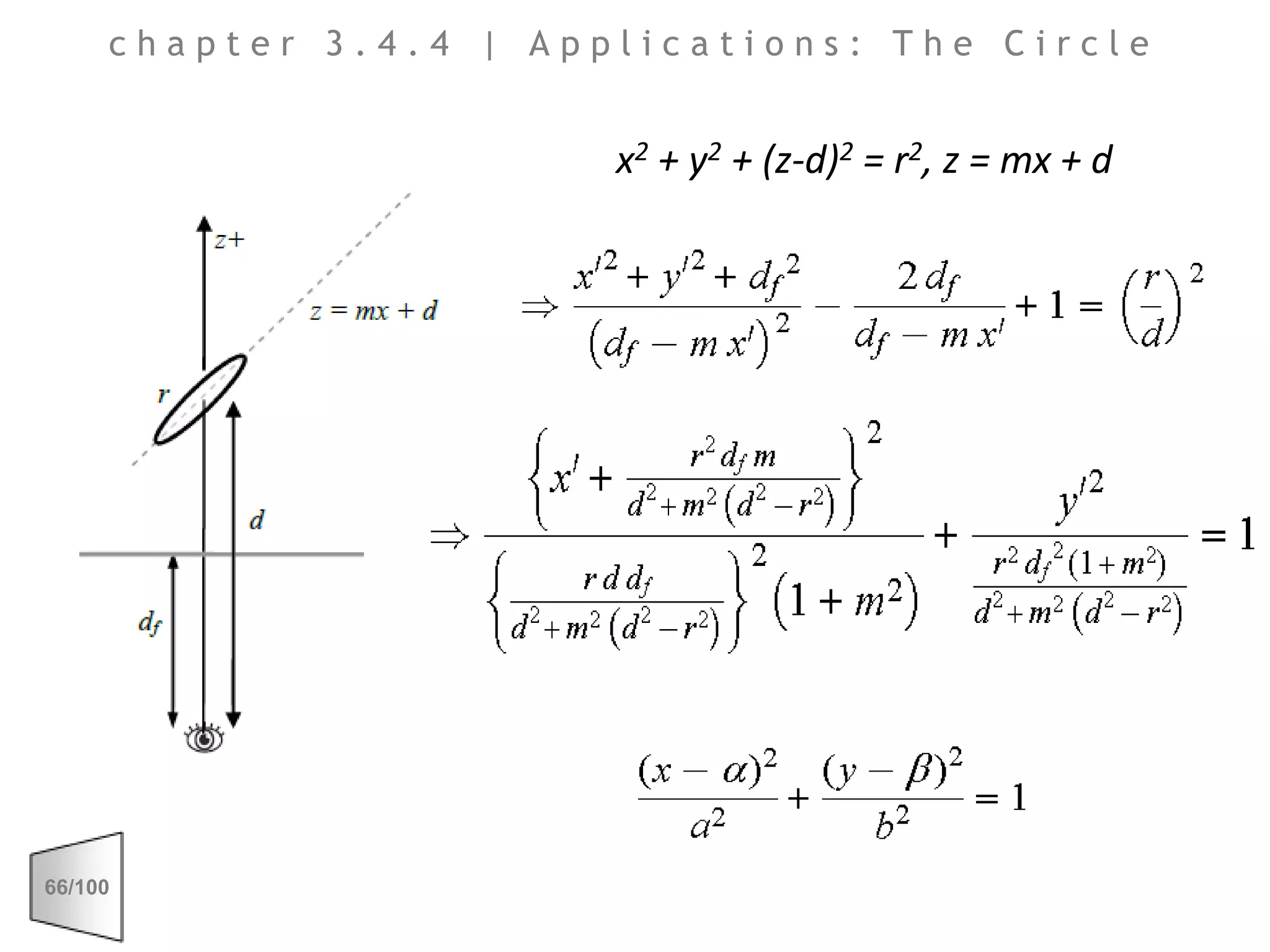
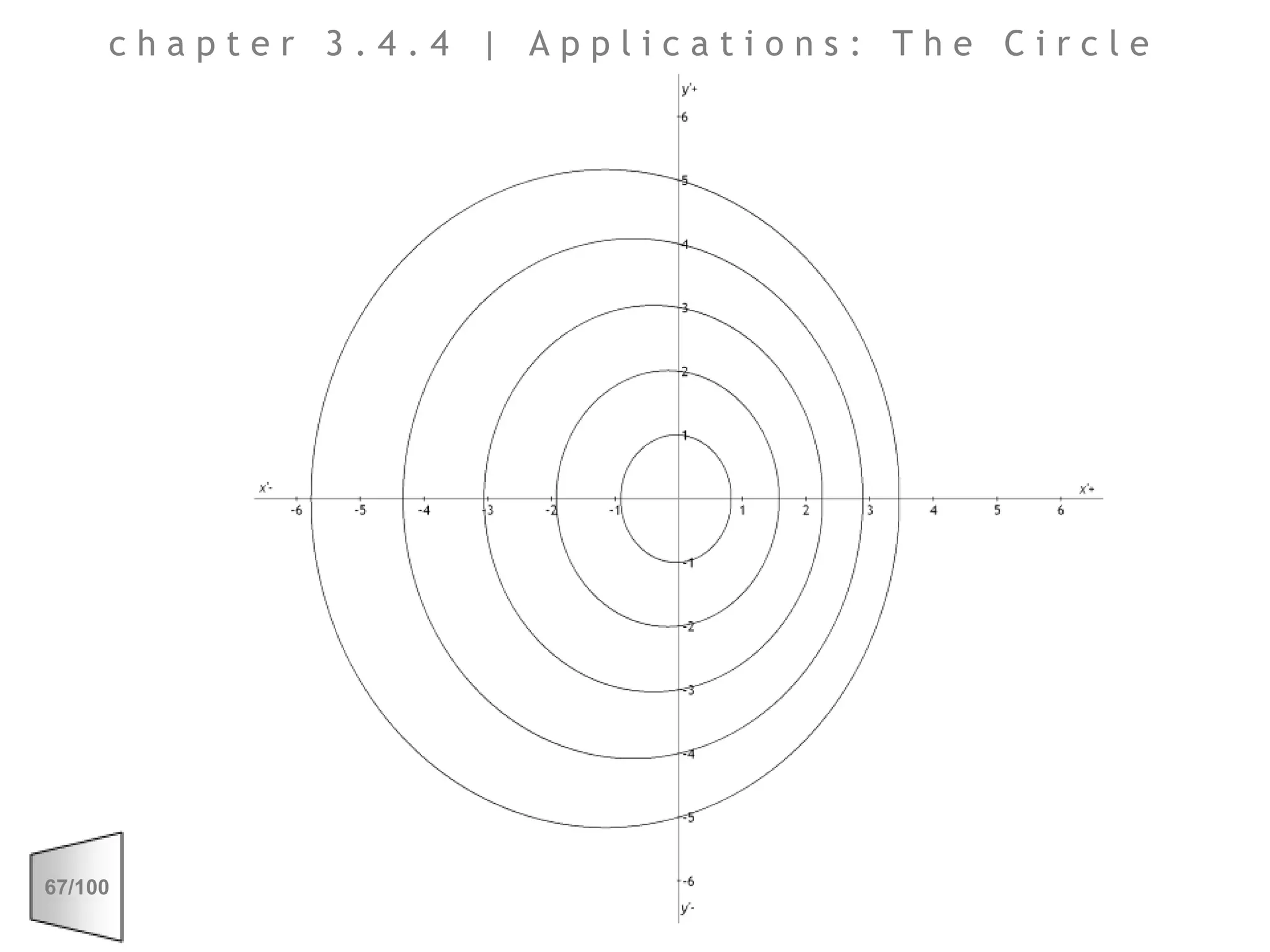
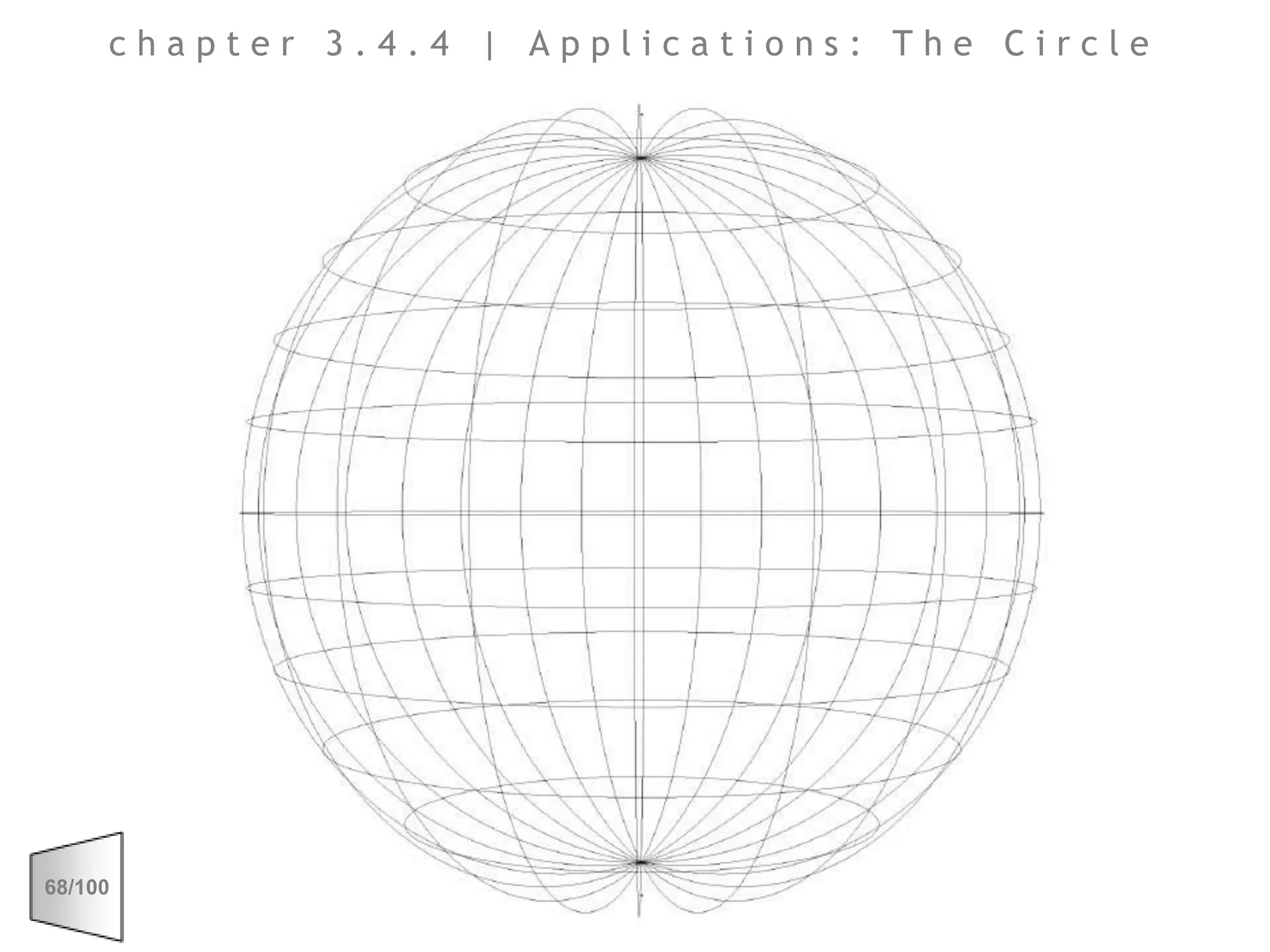
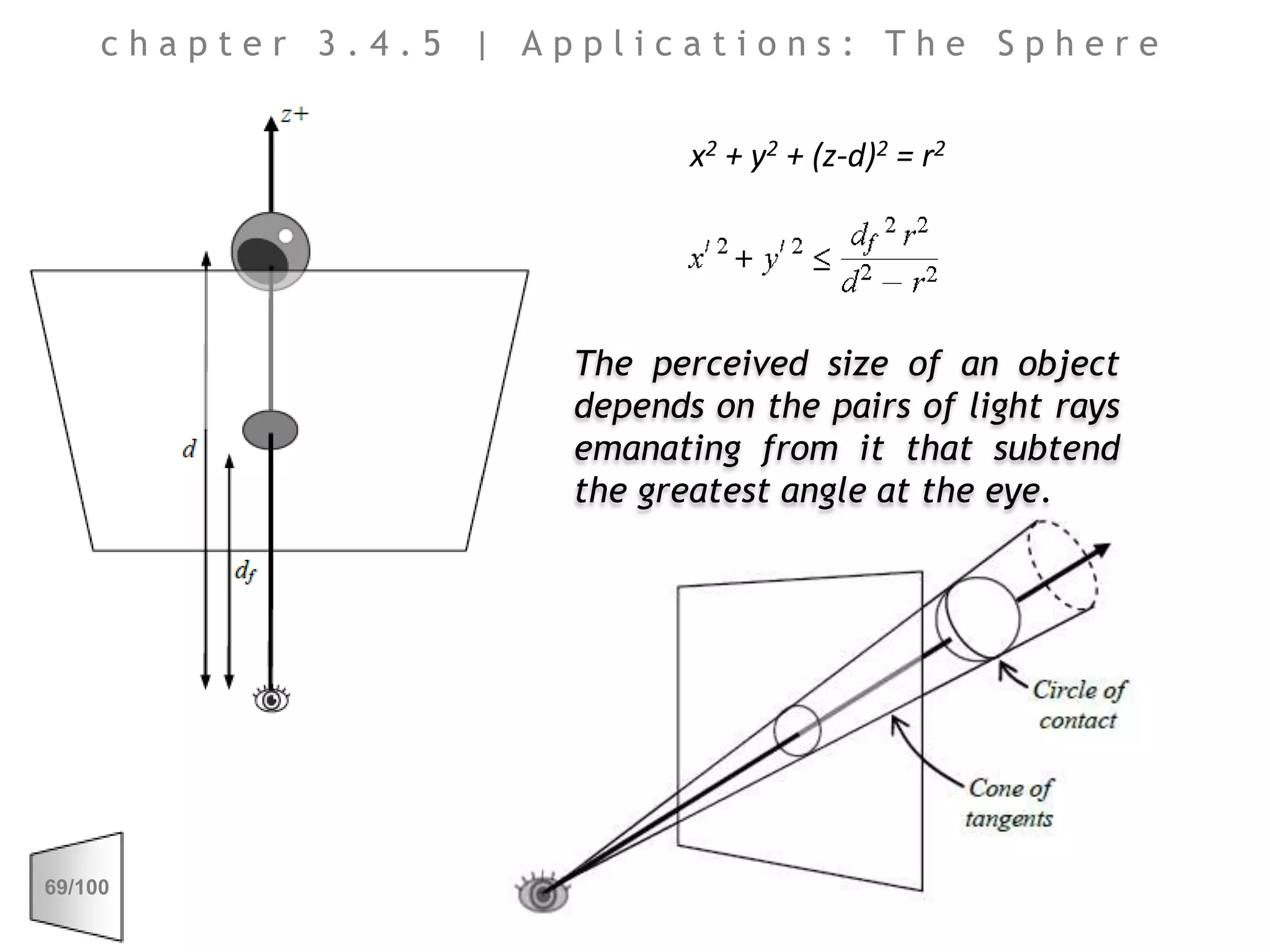
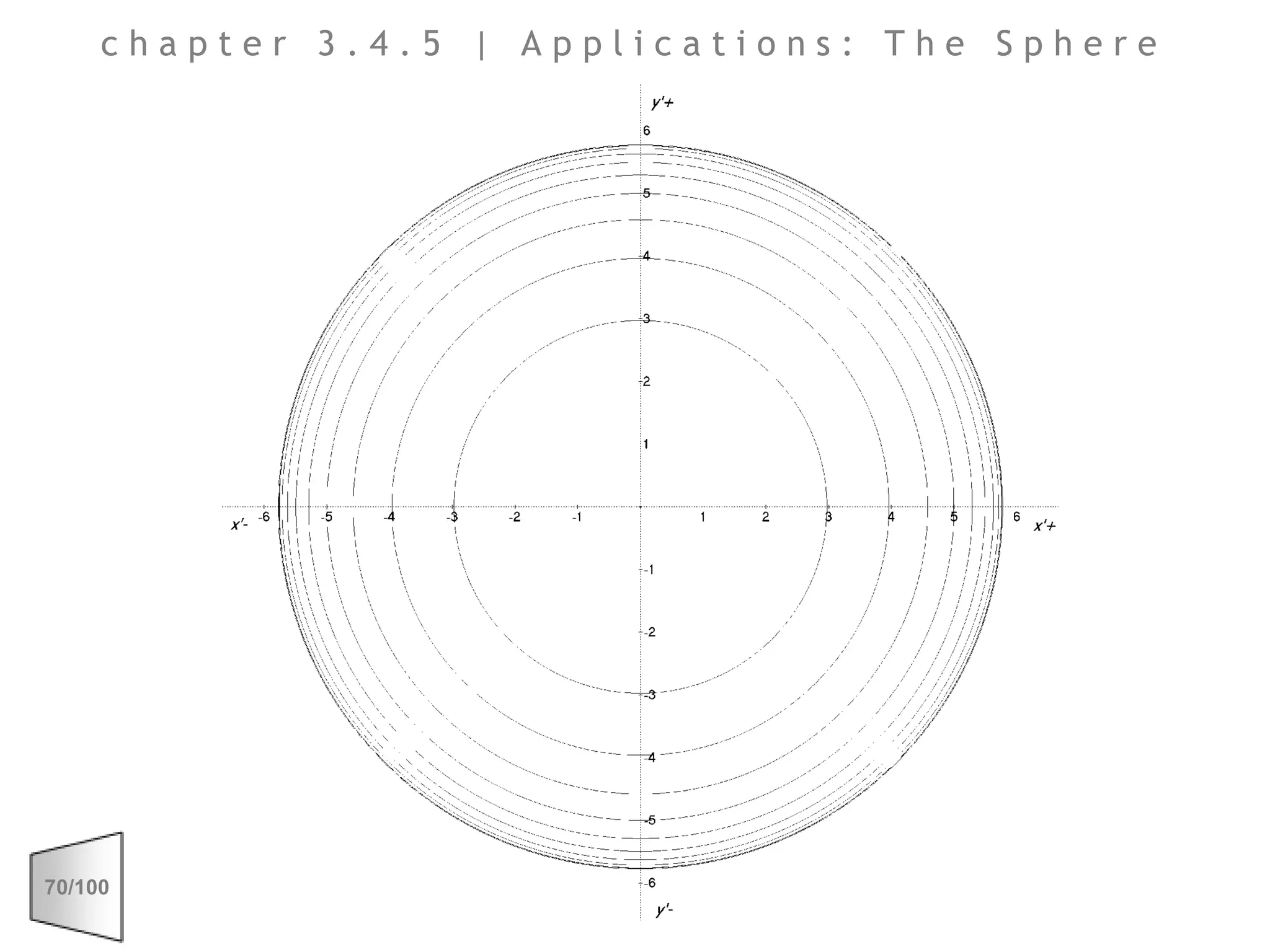
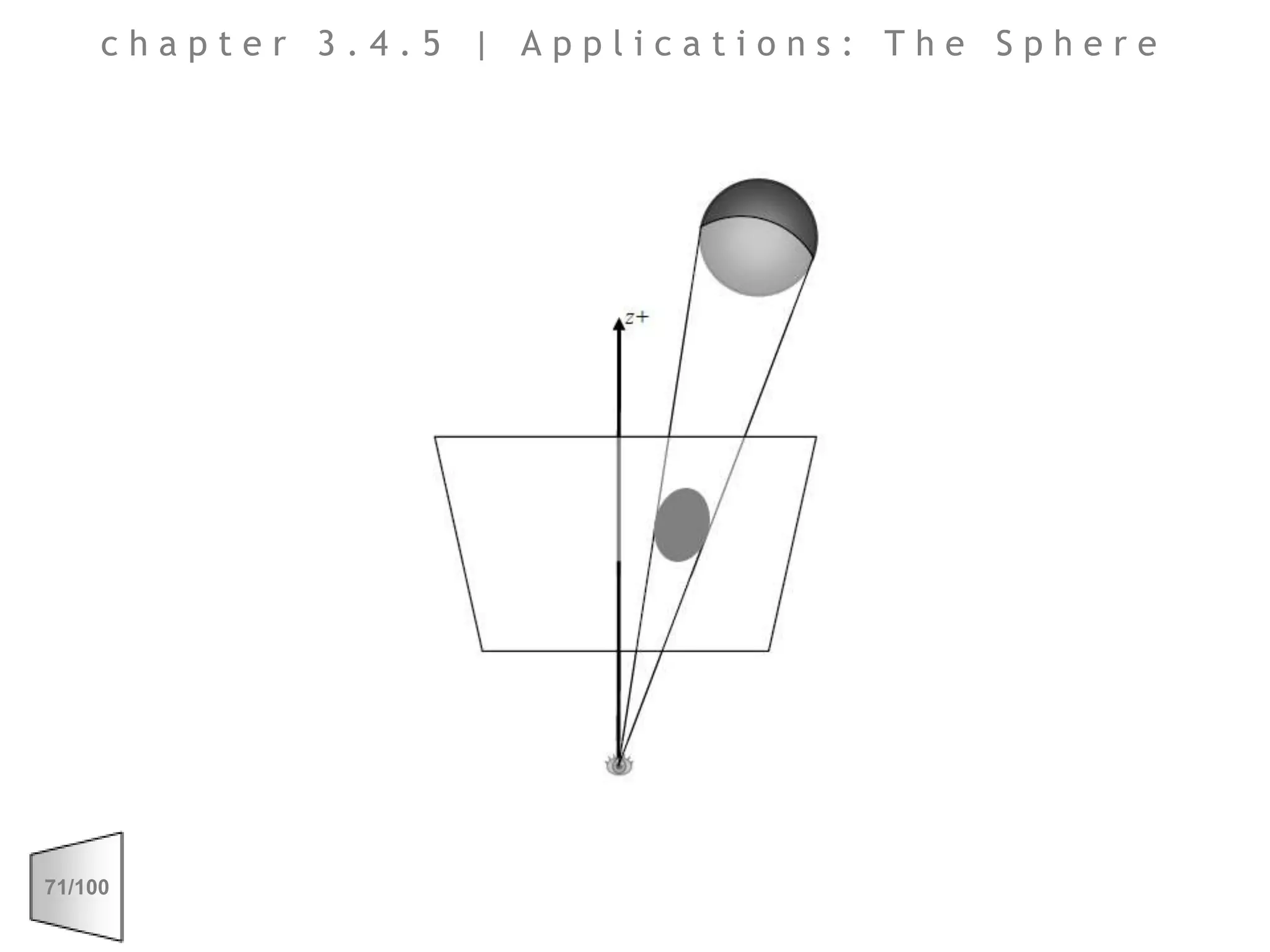
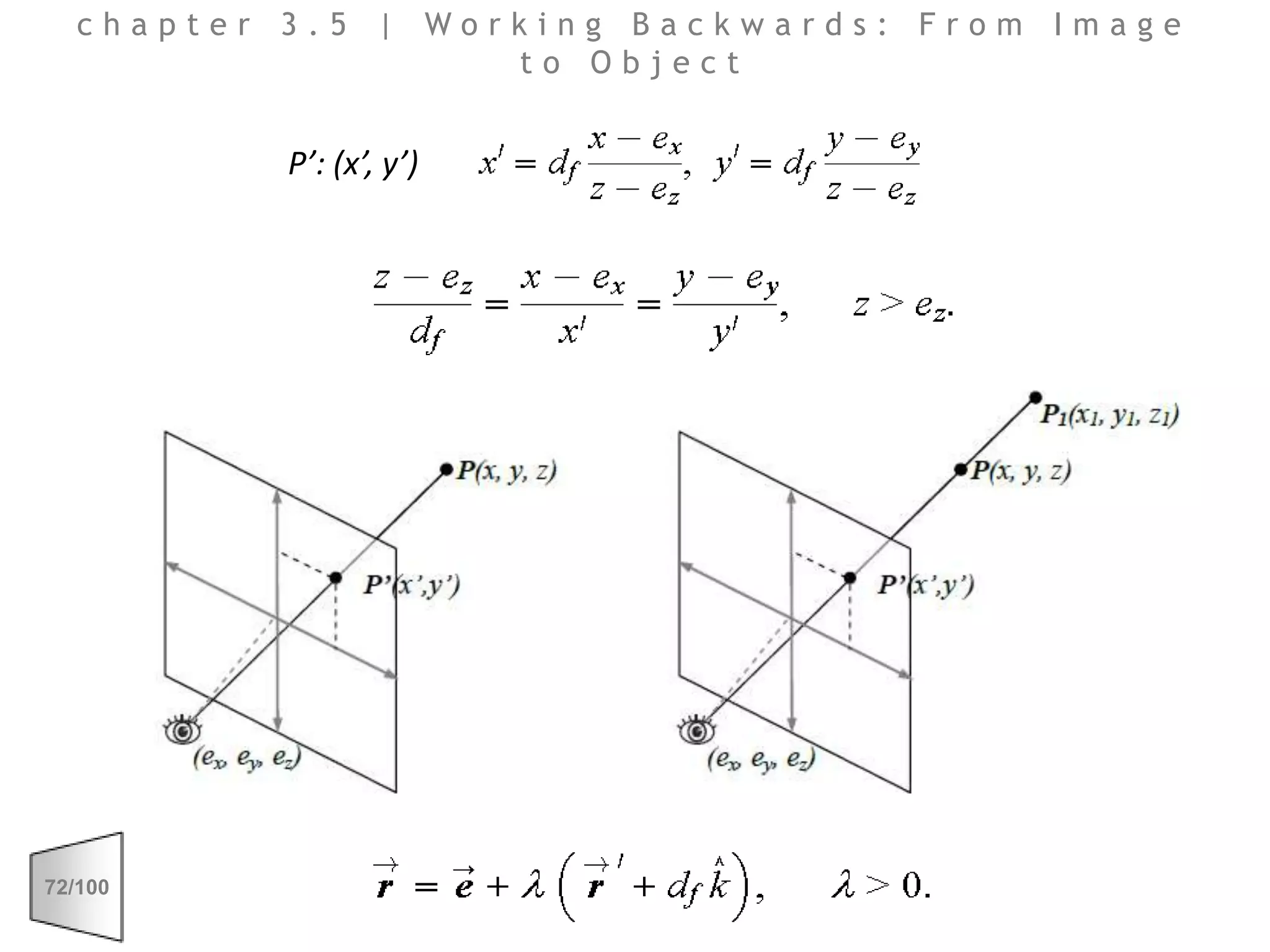
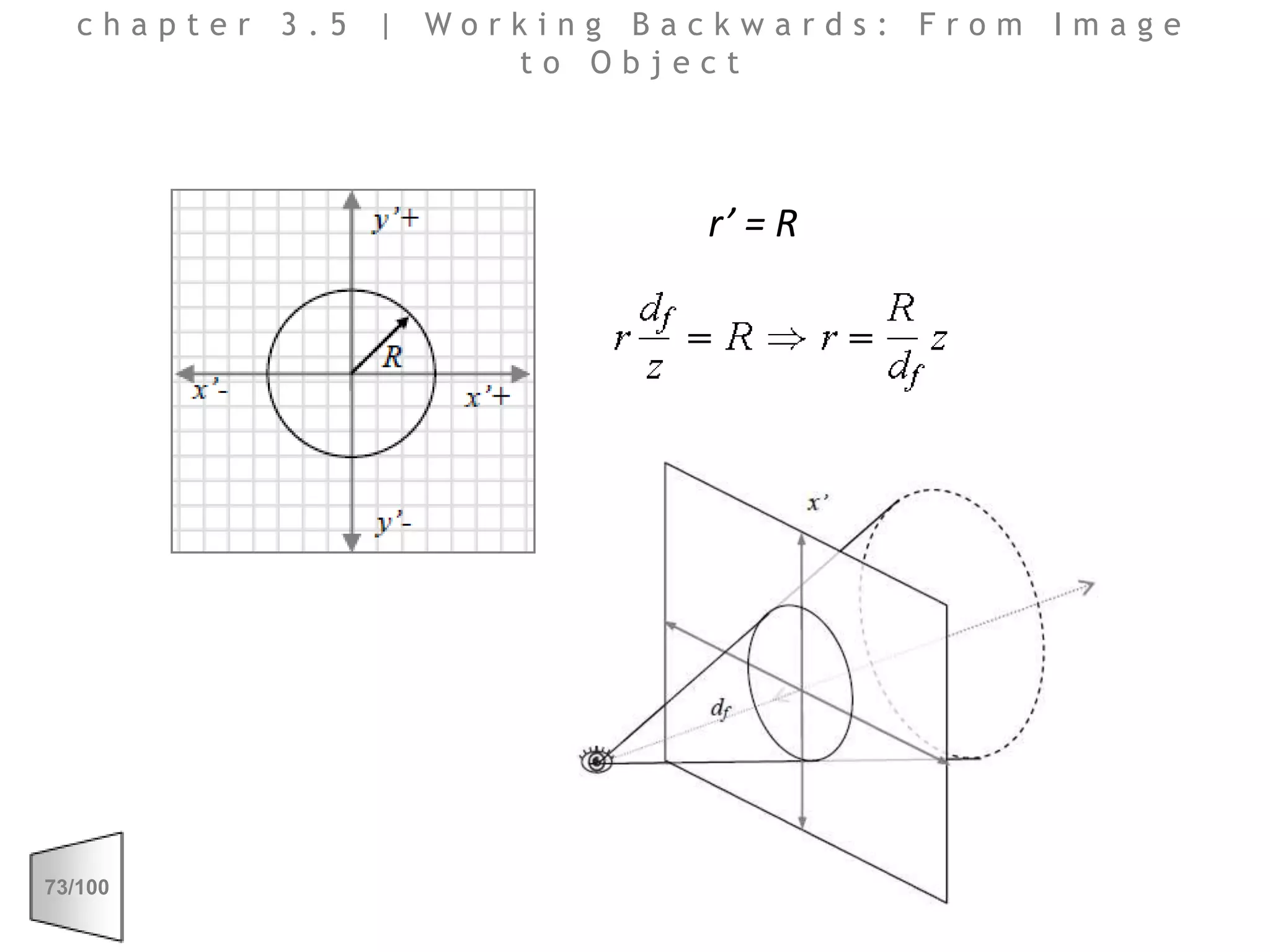
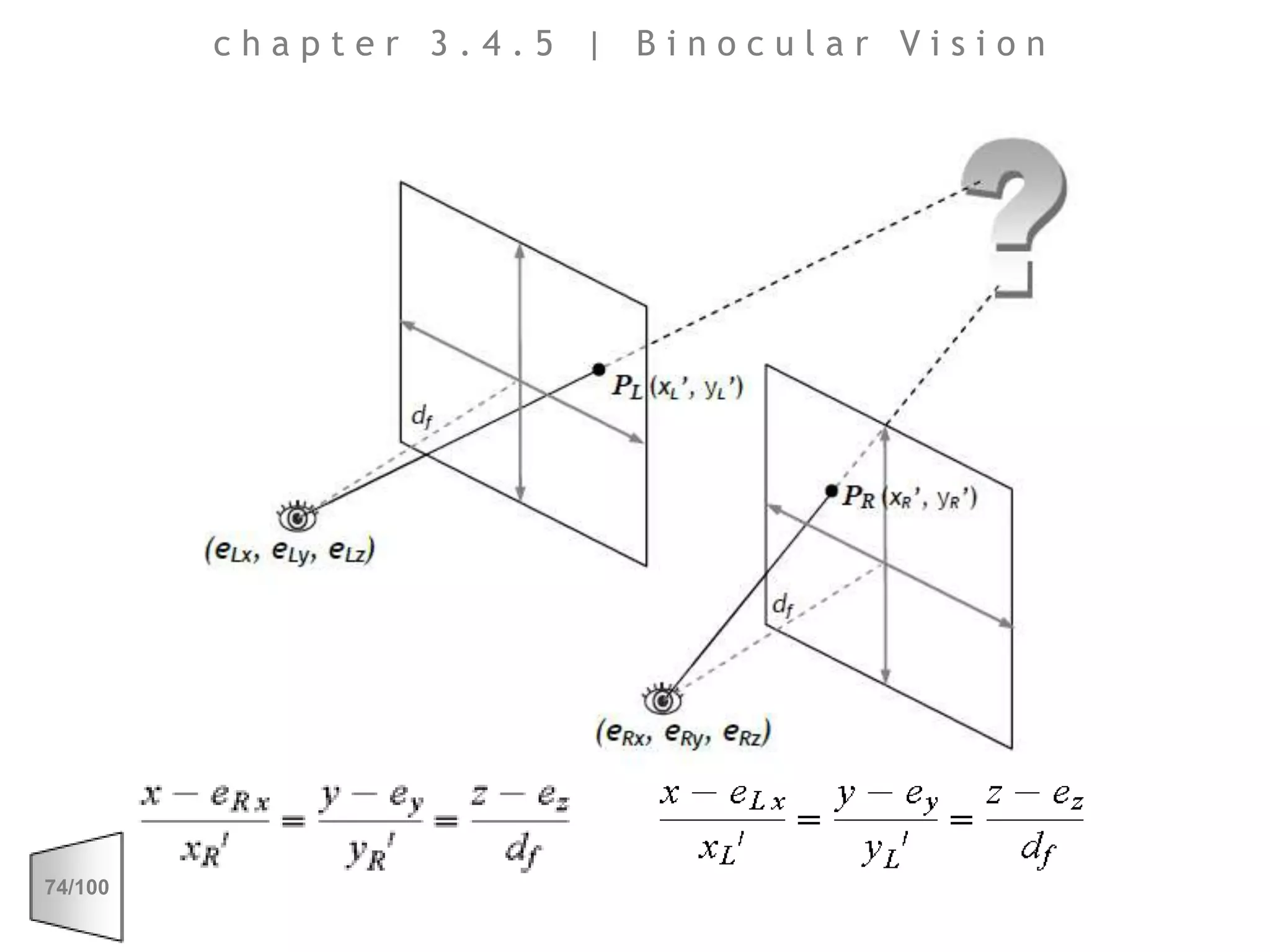
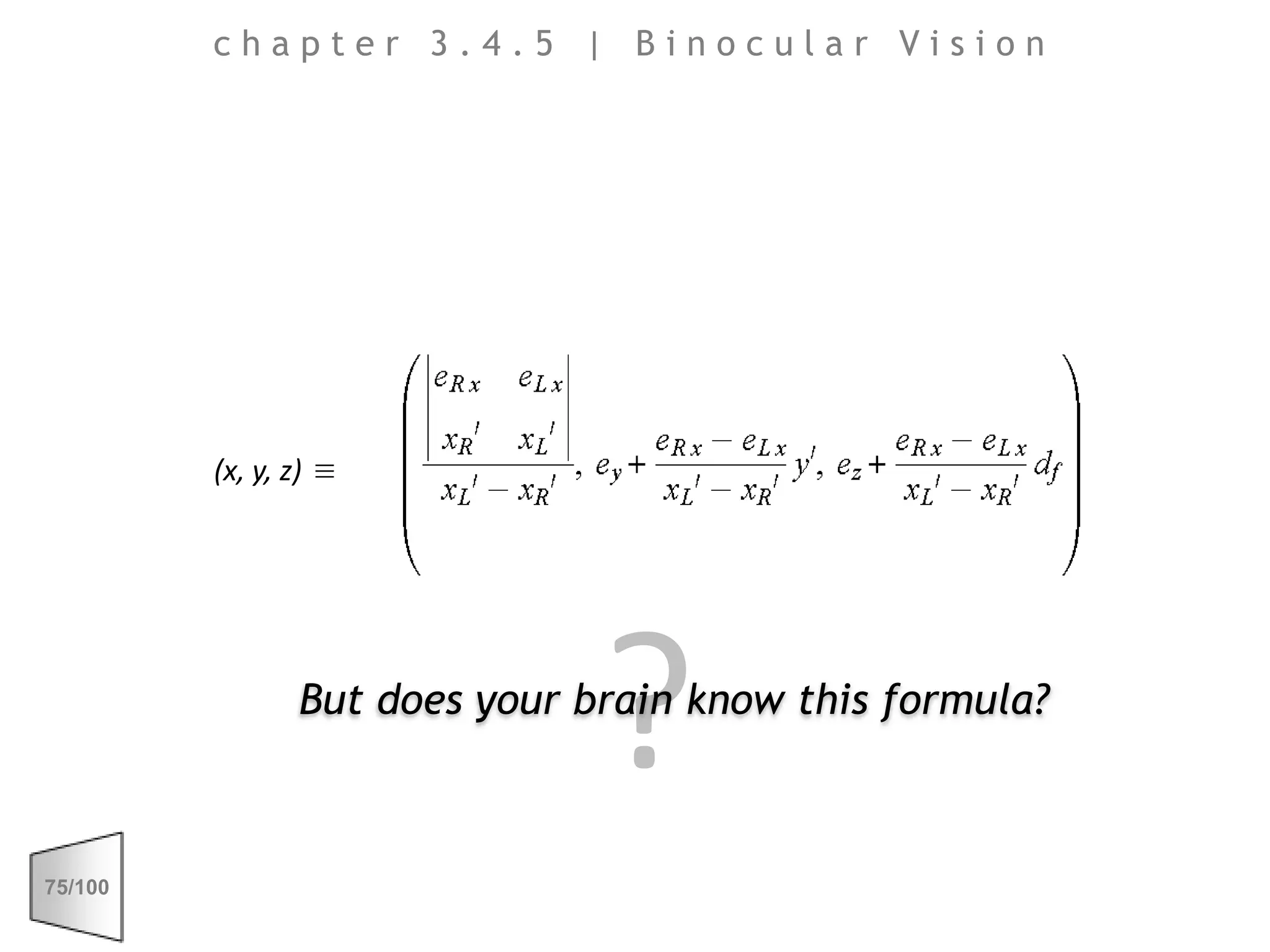
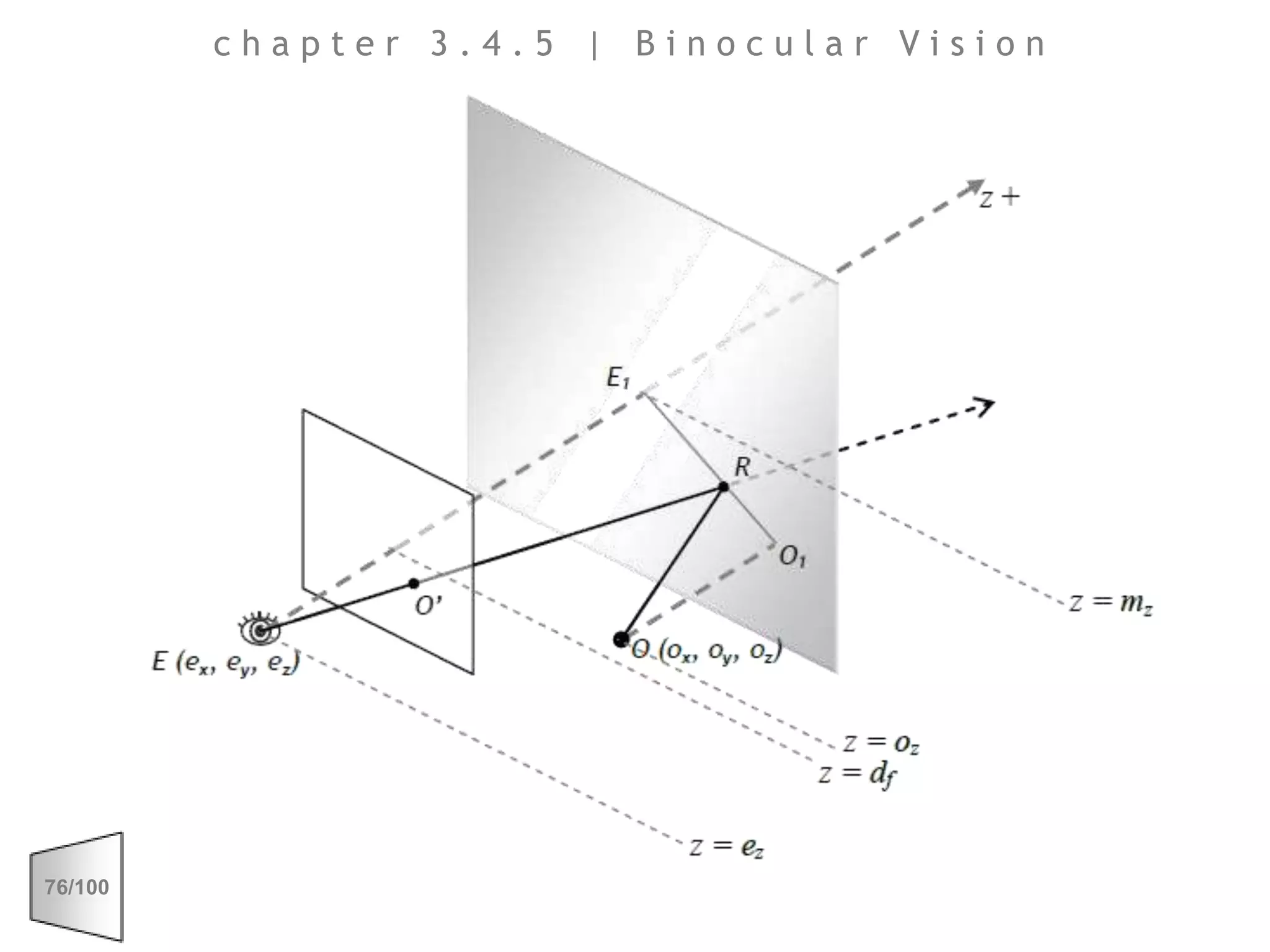
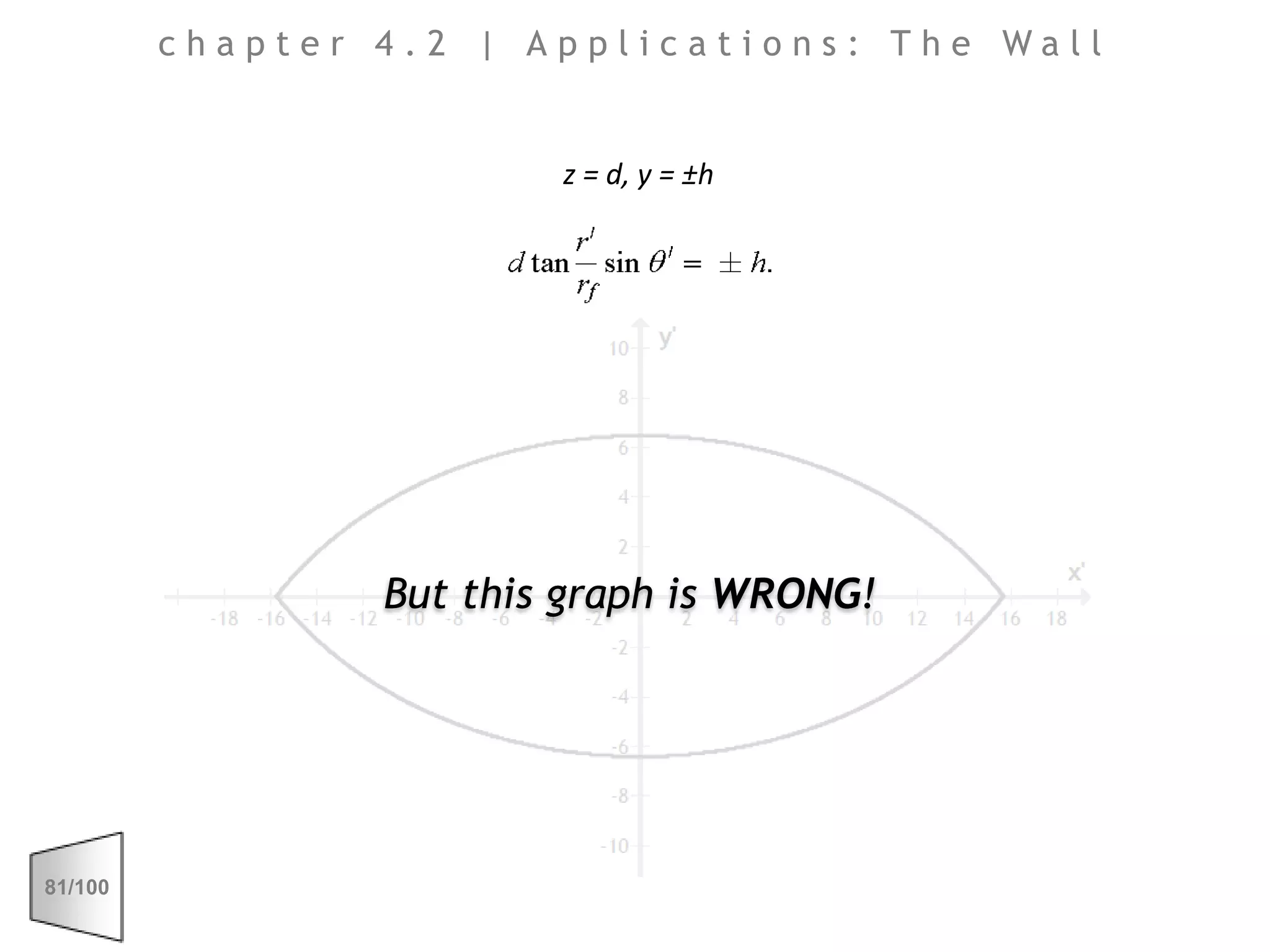
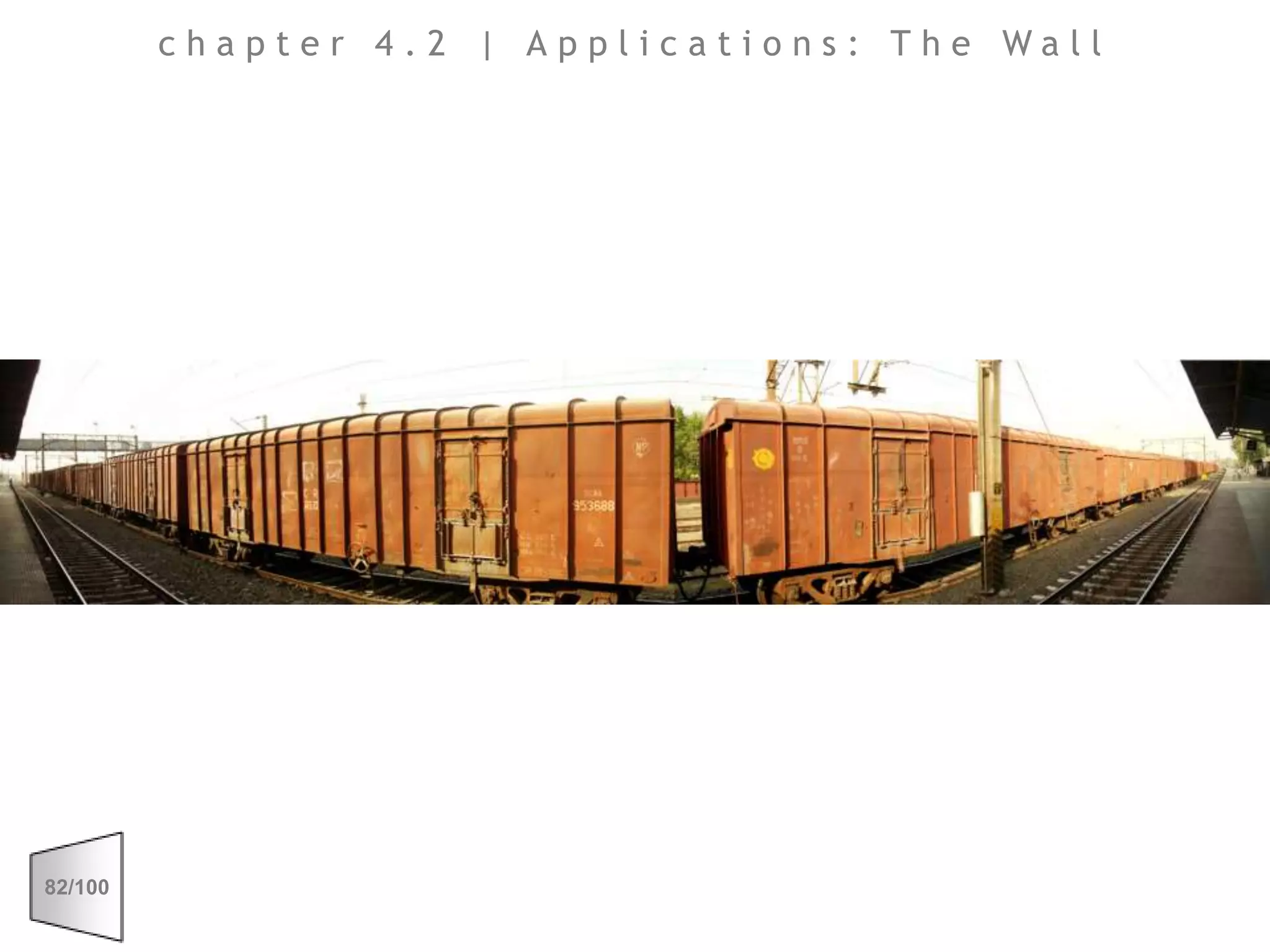
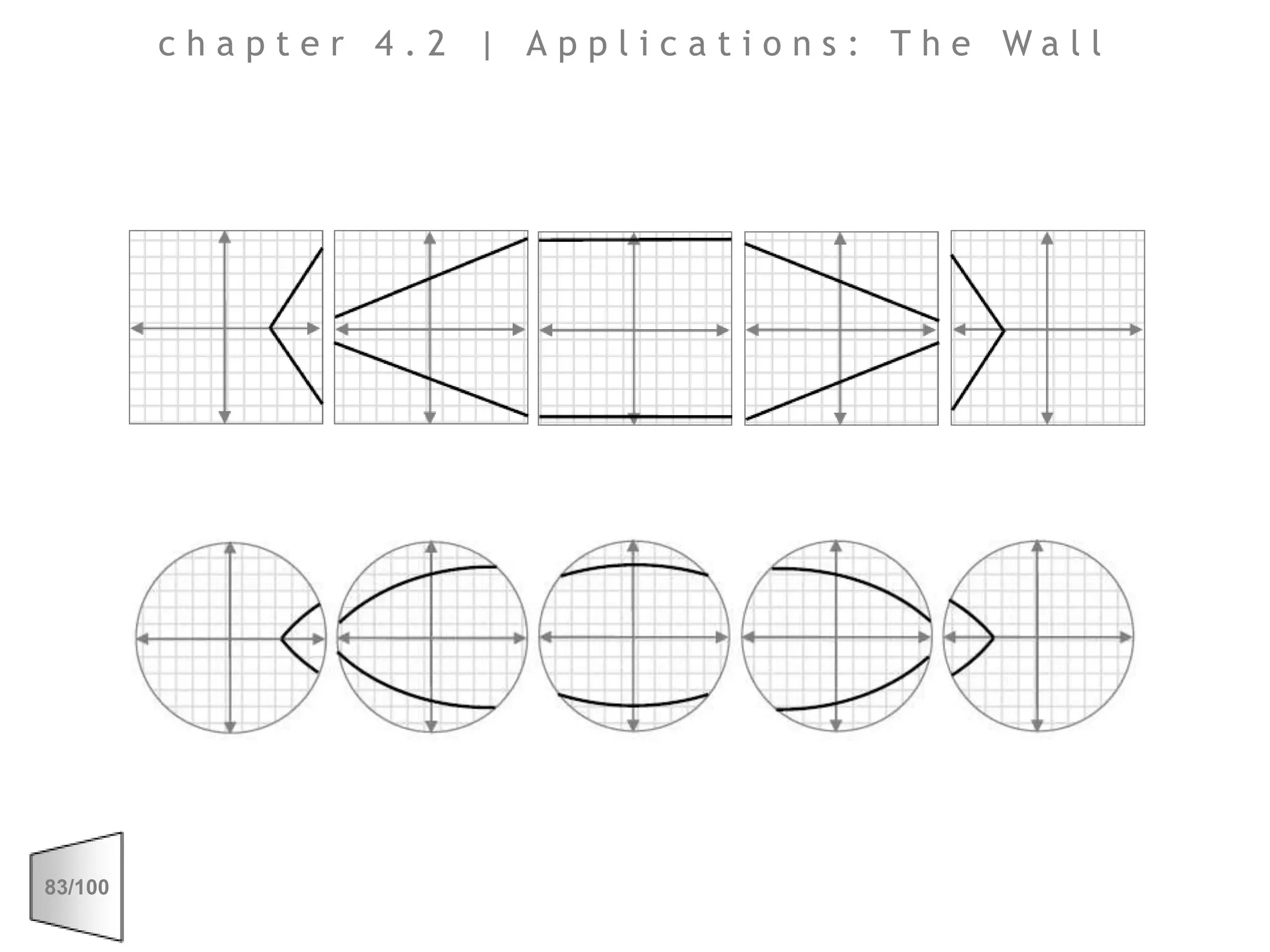
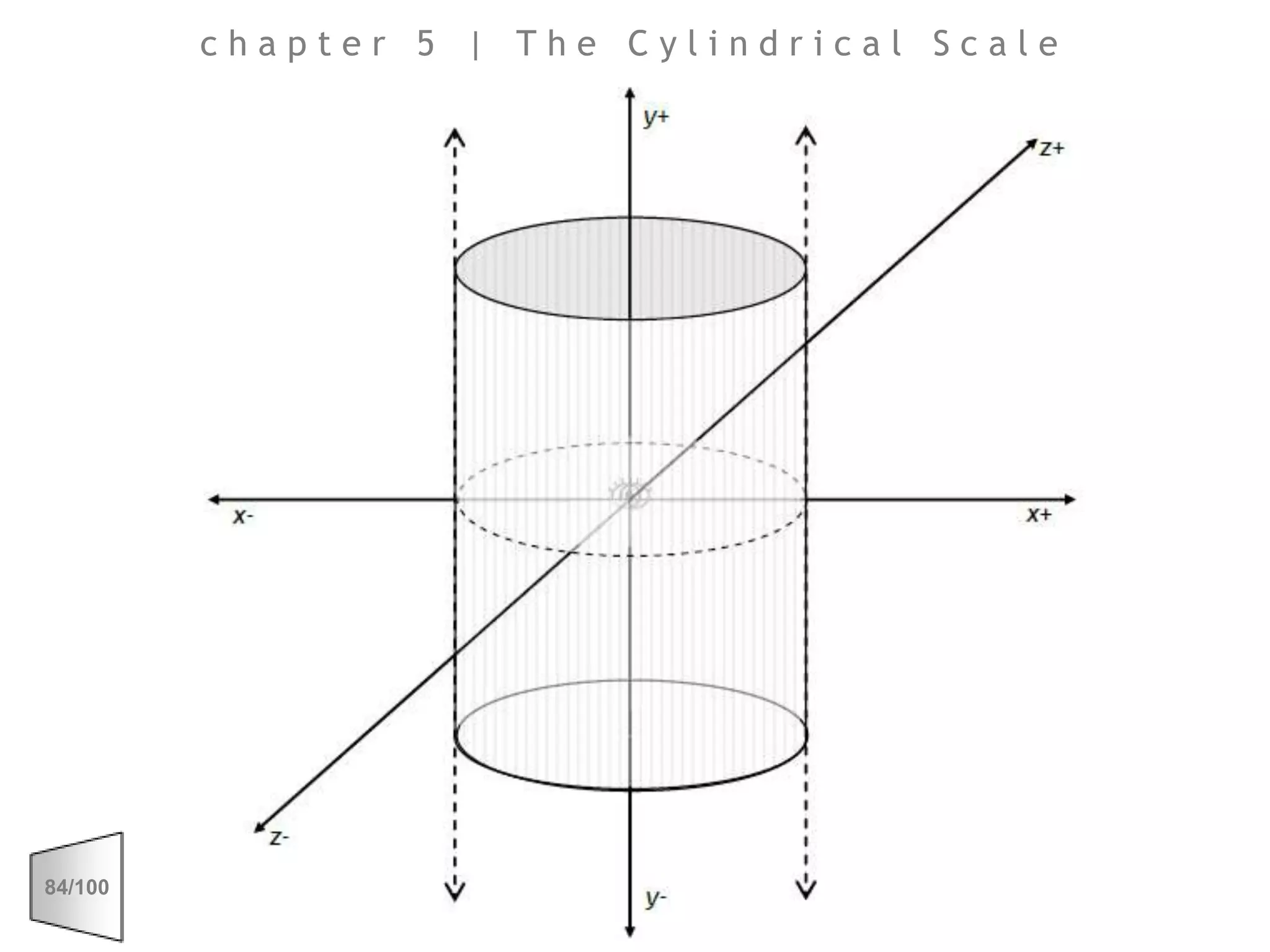
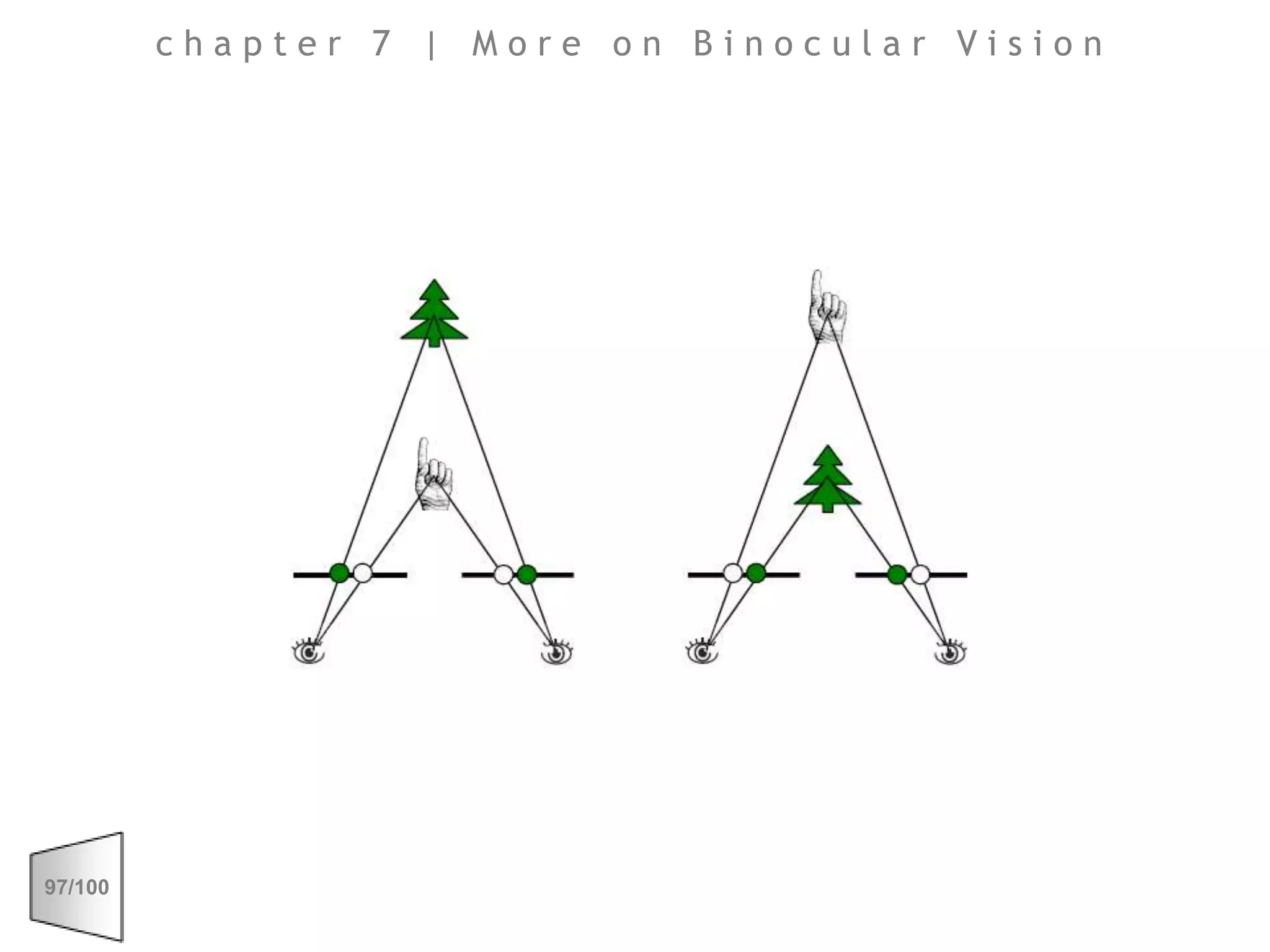
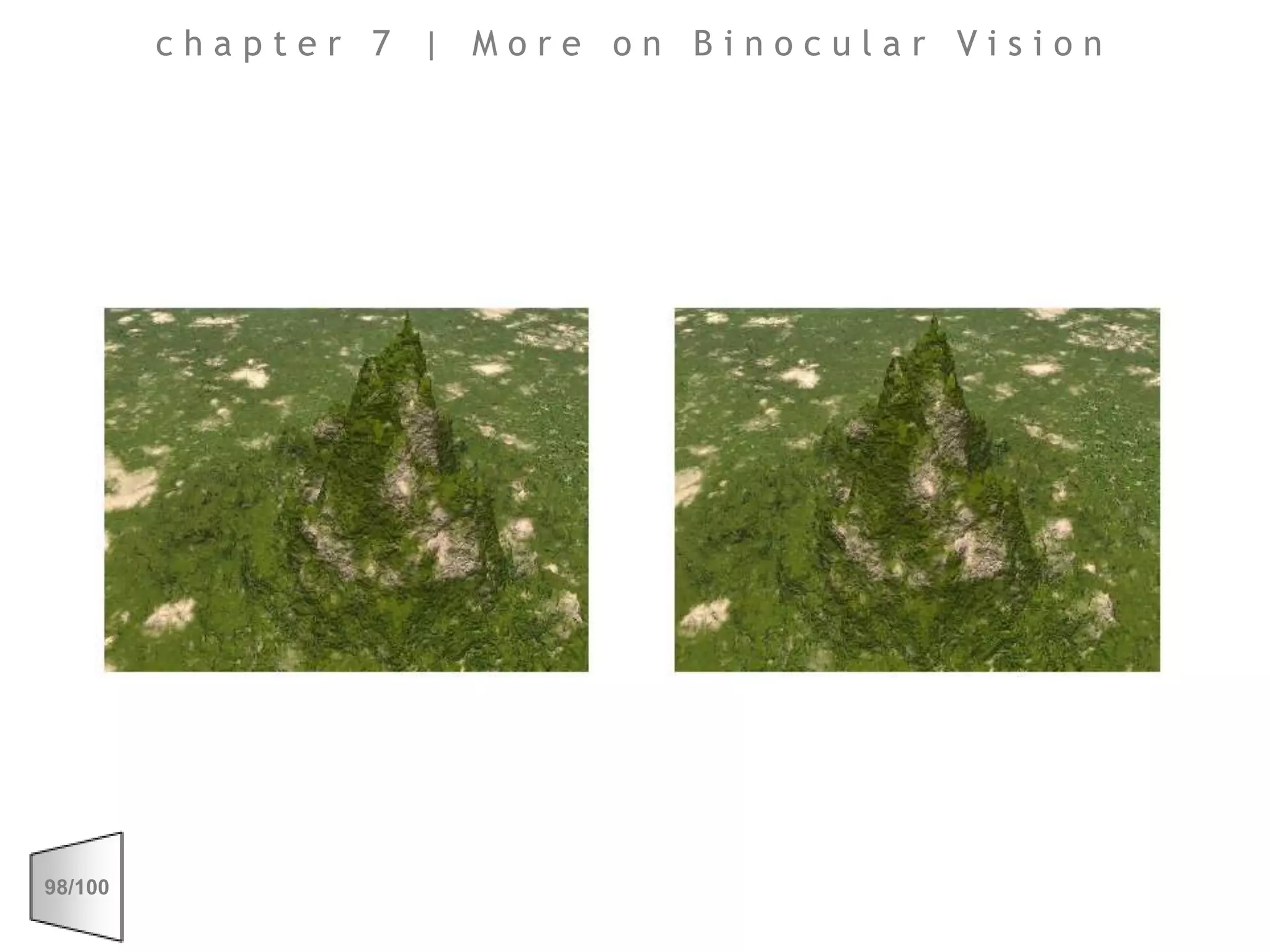
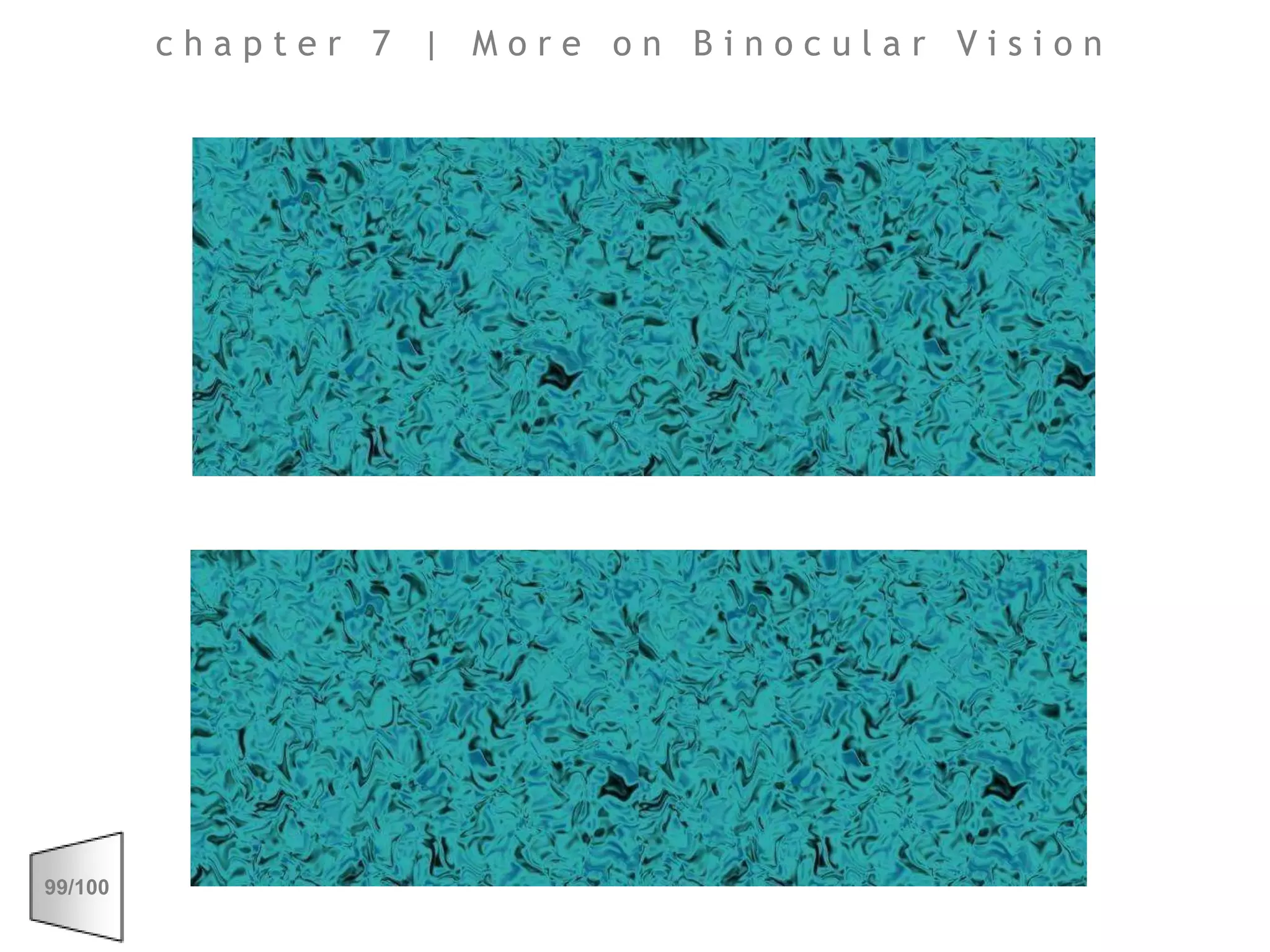

This document discusses the principles of perspective and visual perception, emphasizing how the perceived size and position of objects depend on the angles subtended at the eye rather than their actual dimensions or distances. It covers various geometric applications, including linear, circular, and spherical scales, and explores concepts like collinearity, motion, and binocular vision. The text also addresses practical applications of these principles in contexts such as projecting objects and visualizing geometrical shapes.