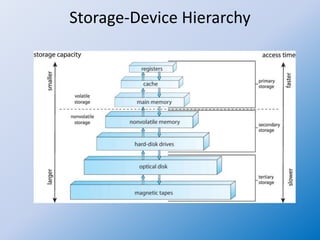
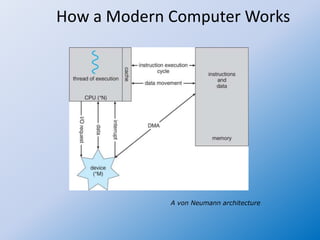
The document discusses the basics of I/O and memory management in operating systems, outlining how control returns to user programs after I/O operations and detailing the structure of main and secondary storage. It explains device drivers, caching, and the storage hierarchy, emphasizing the differences in characteristics between volatile and non-volatile memory. Additionally, it covers computer architecture, including multiprocessor systems and clustered systems, highlighting their operational dynamics and advantages.