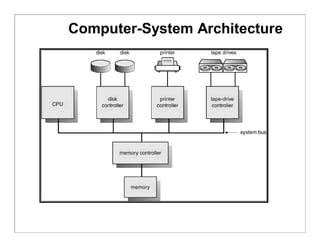
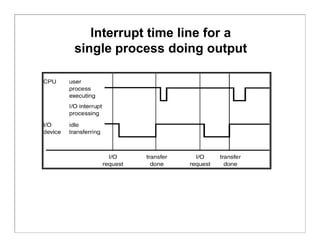
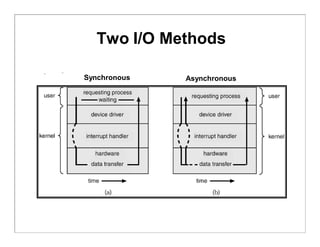
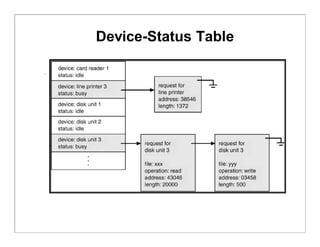
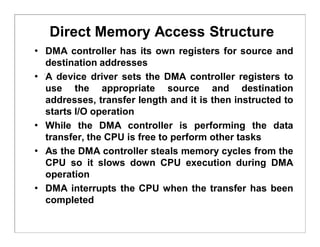
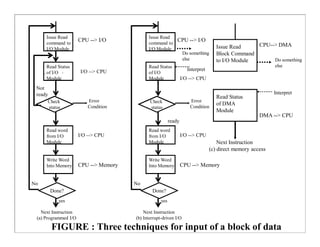
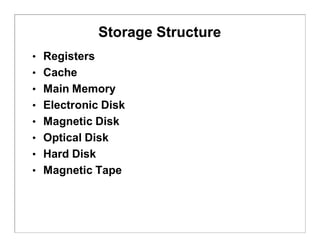
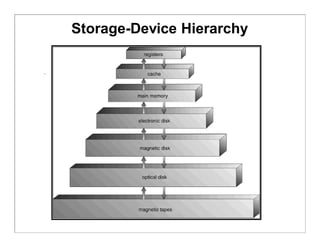
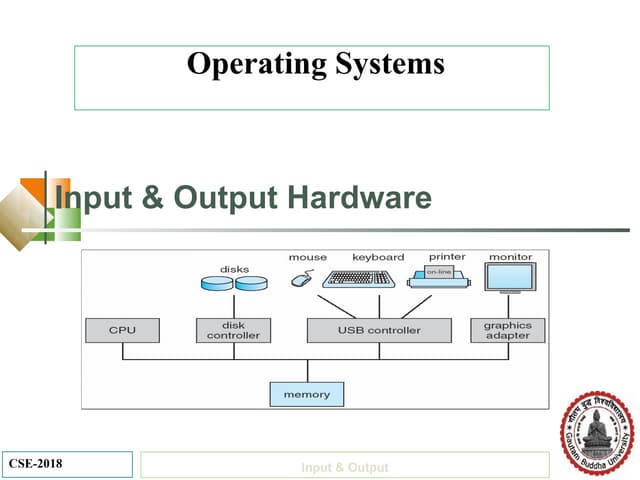
The document discusses various aspects of computer system structures. It describes that a modern computer system consists of a CPU, memory, and device controllers connected through a system bus. I/O devices and the CPU can operate concurrently, with each device controller managing a specific device type. Interrupts are used to signal when I/O operations are complete. Memory is organized in a hierarchy from fastest and smallest registers to slower but larger magnetic disks. Various techniques like caching, paging and virtual memory help bridge differences in speed between CPU and I/O devices. The document also discusses hardware protection mechanisms like dual mode operation, memory protection using base and limit registers, and CPU protection using timers.































































![Attack surfaces and attack tress[inform]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture03-260108015941-a4dee53b-thumbnail.jpg?width=640&height=640&fit=bounds)









