Downloaded 12 times
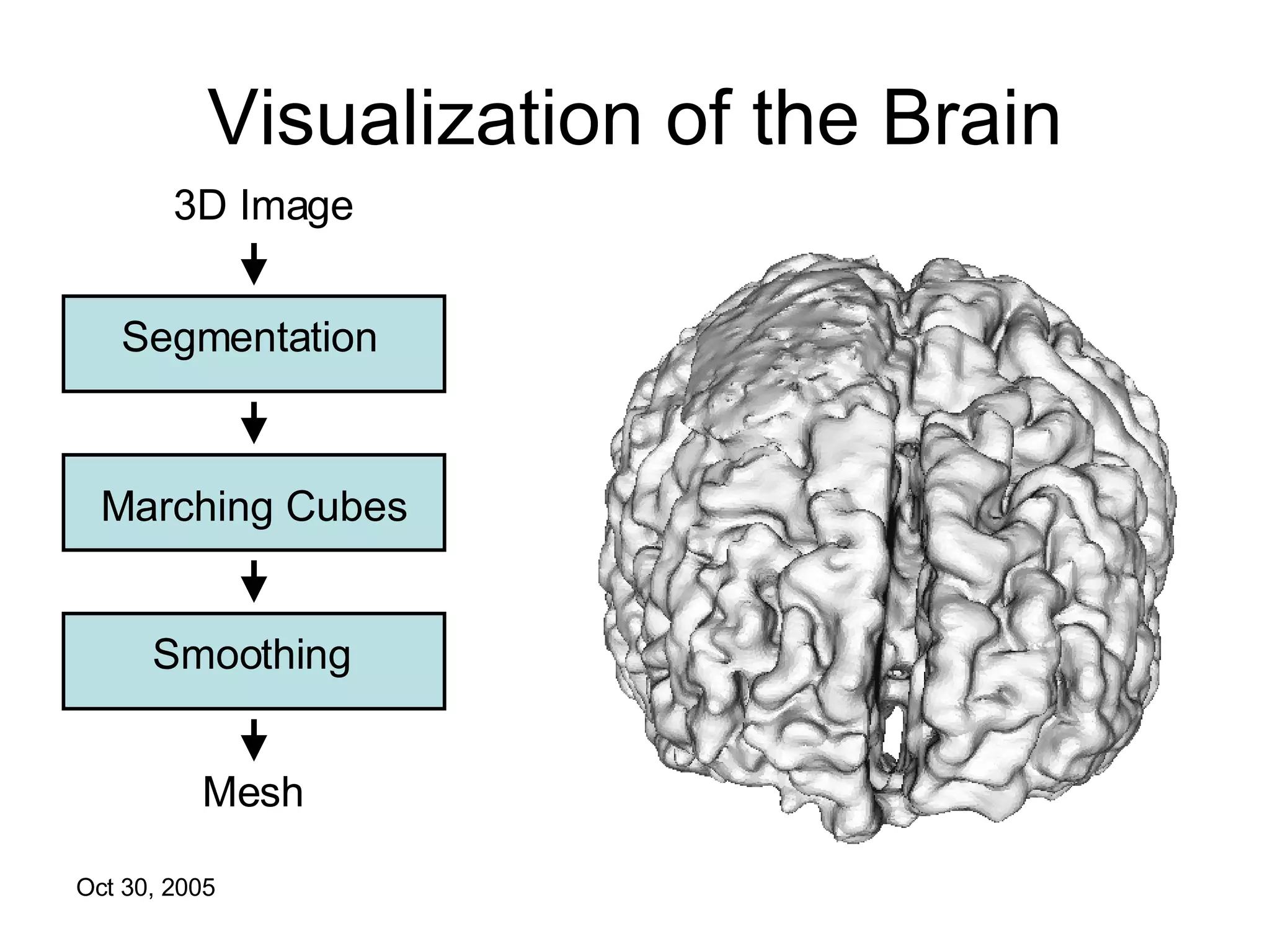
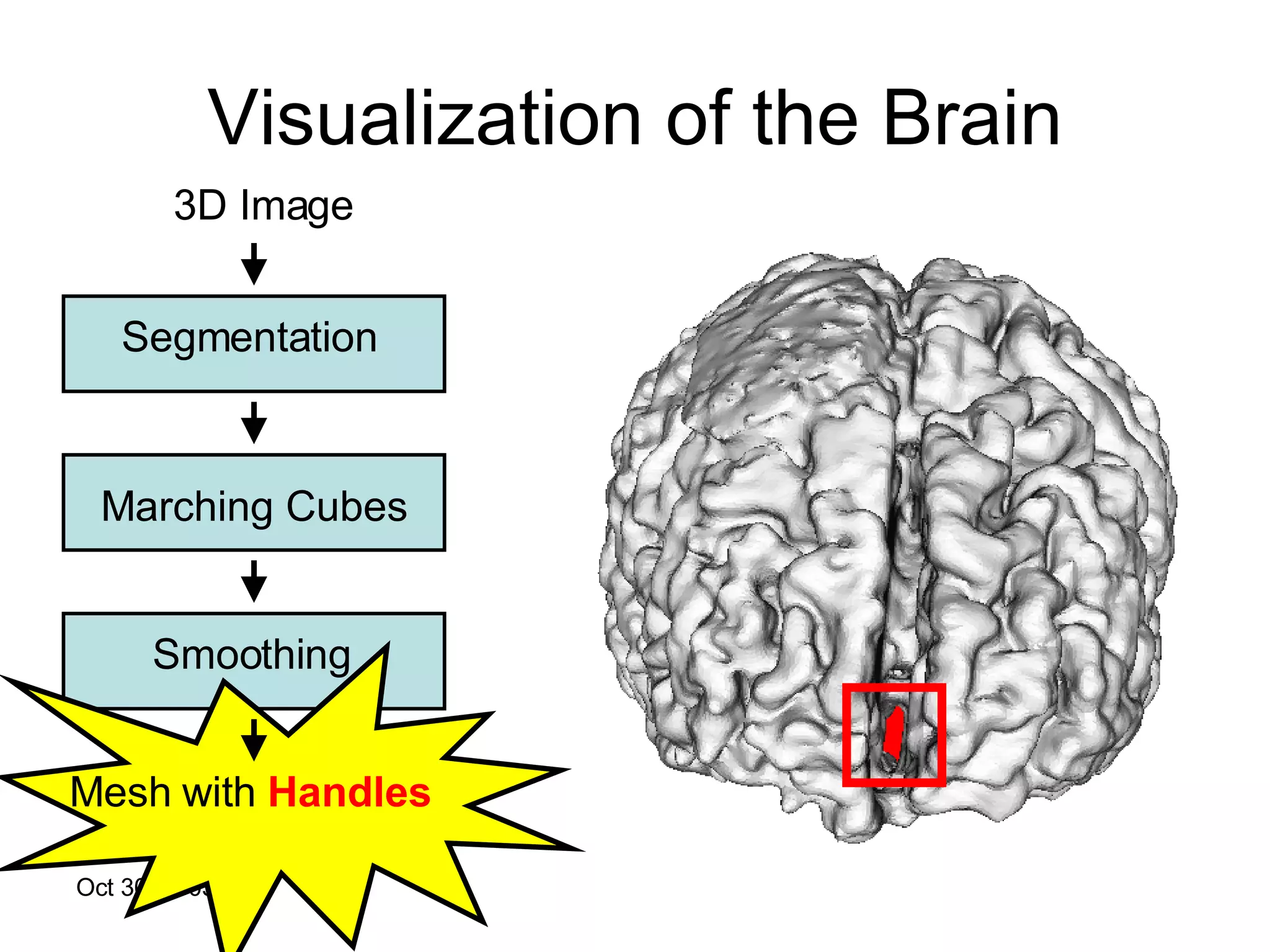
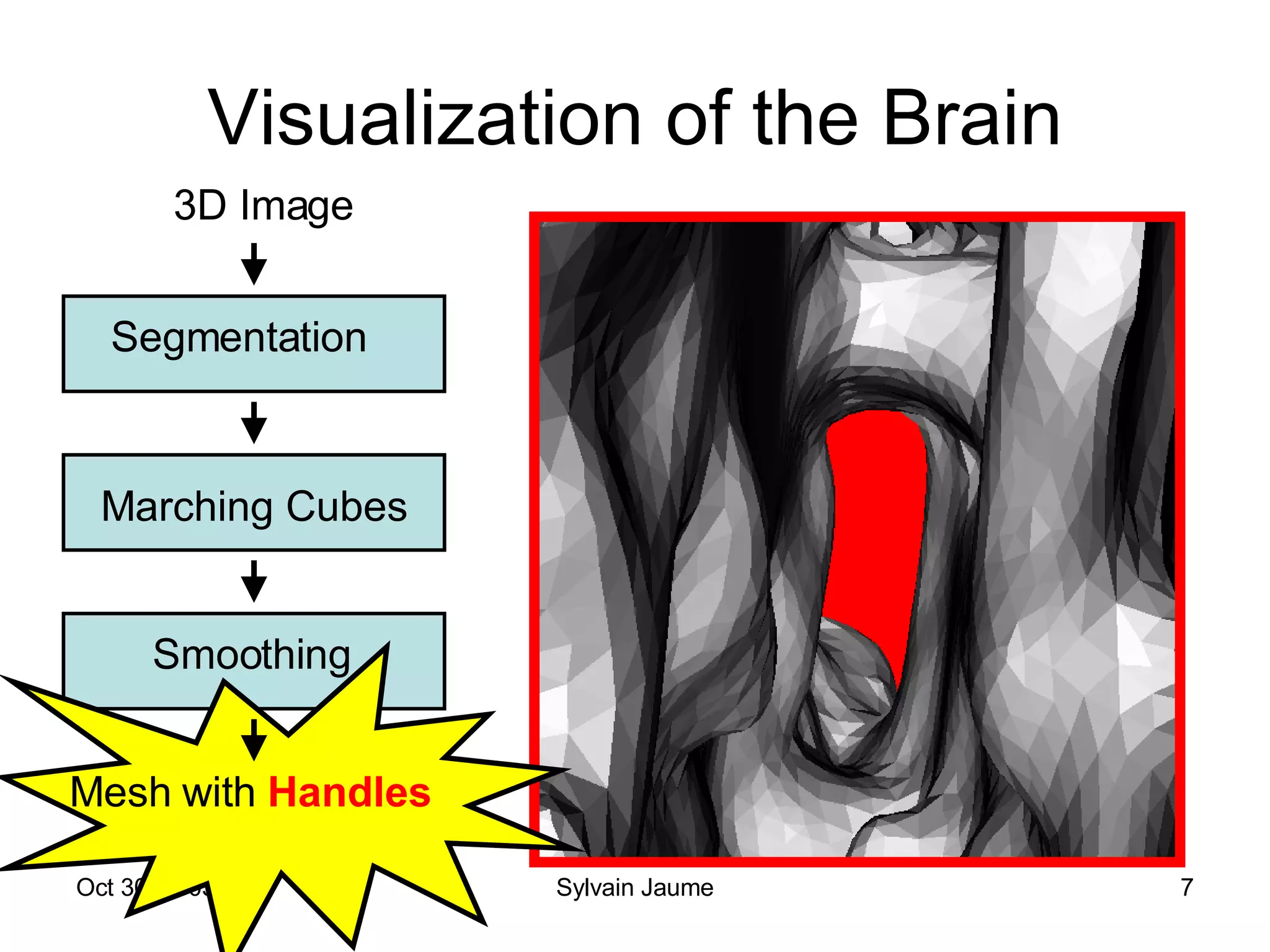
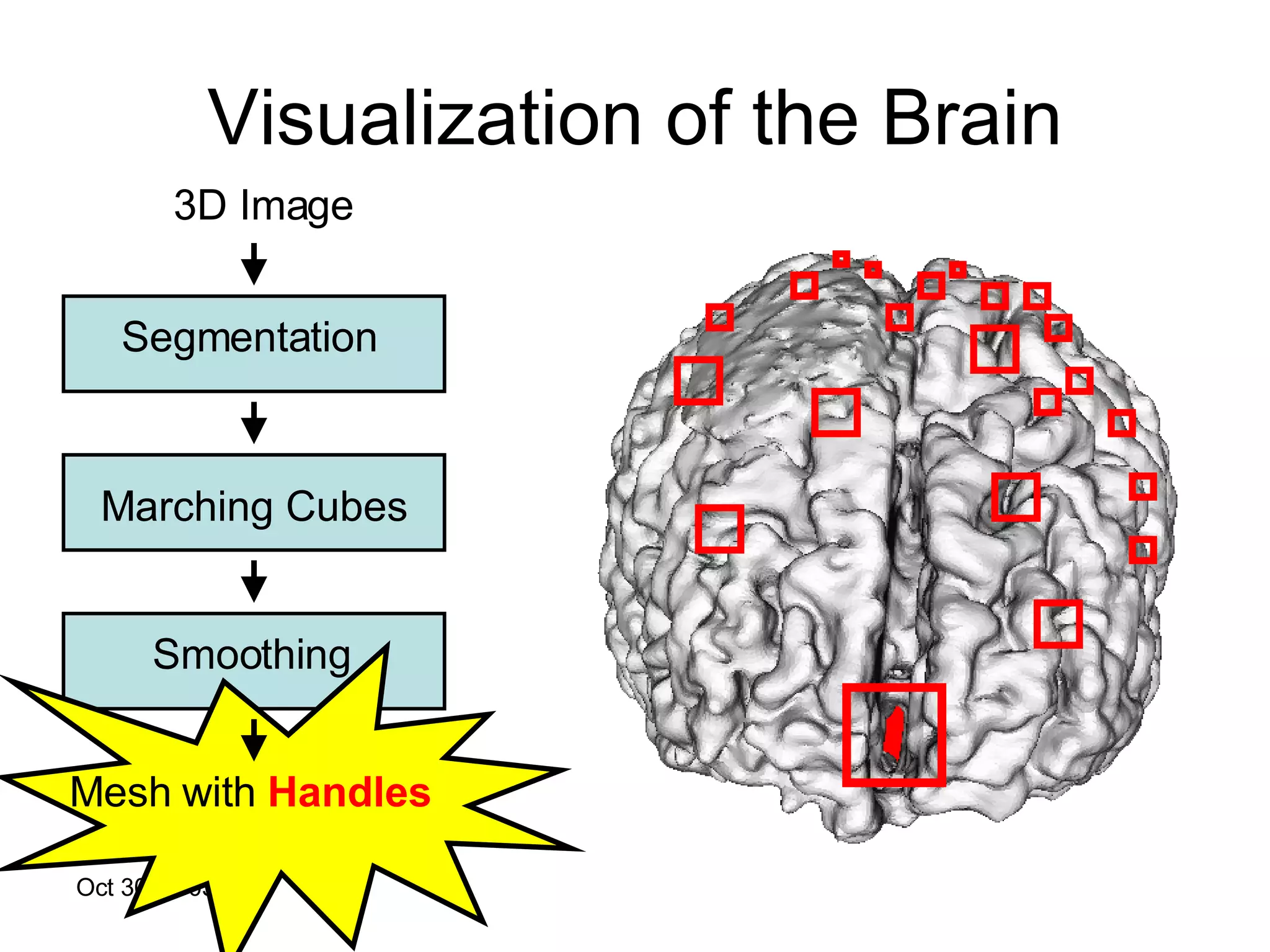
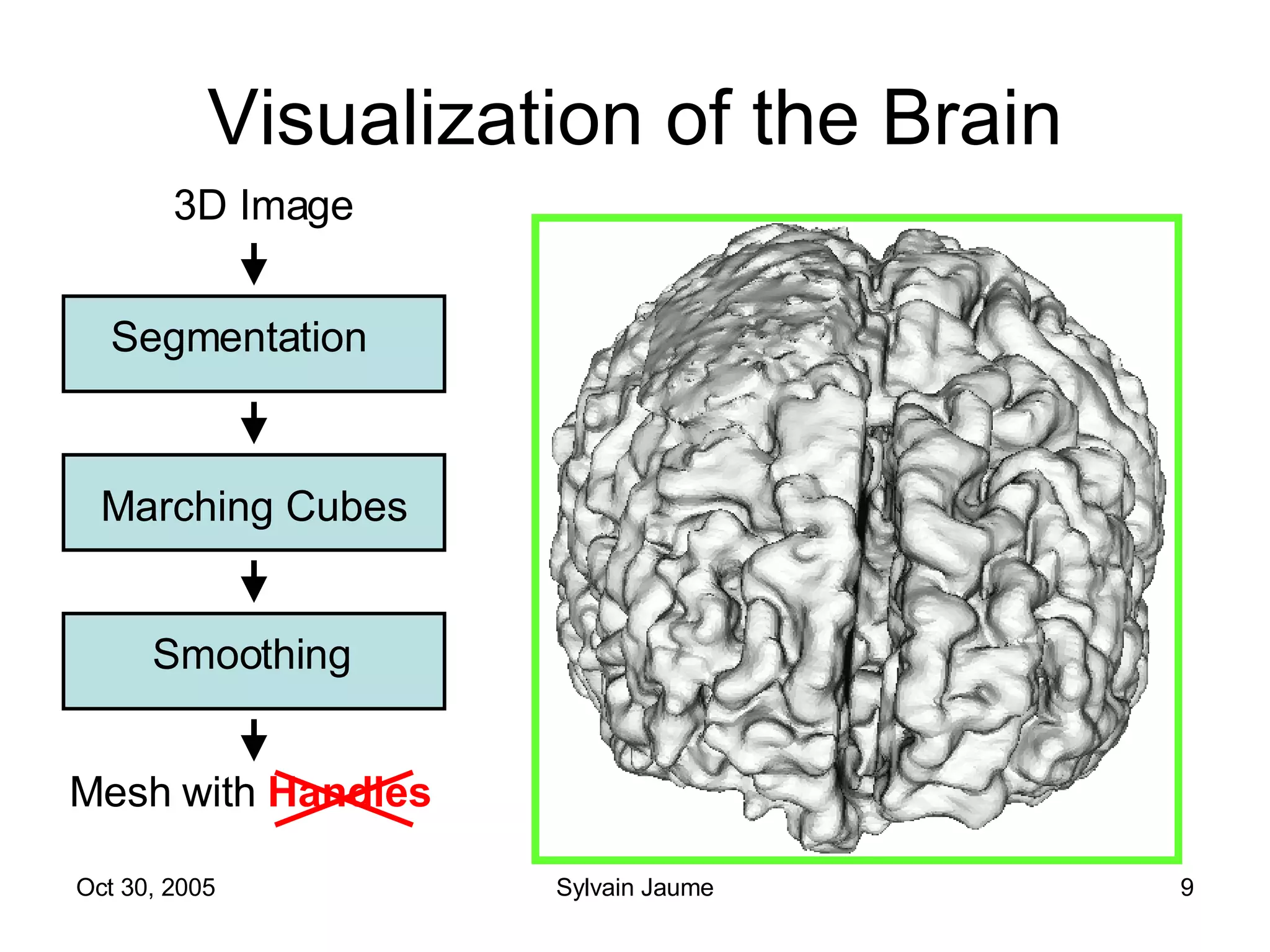

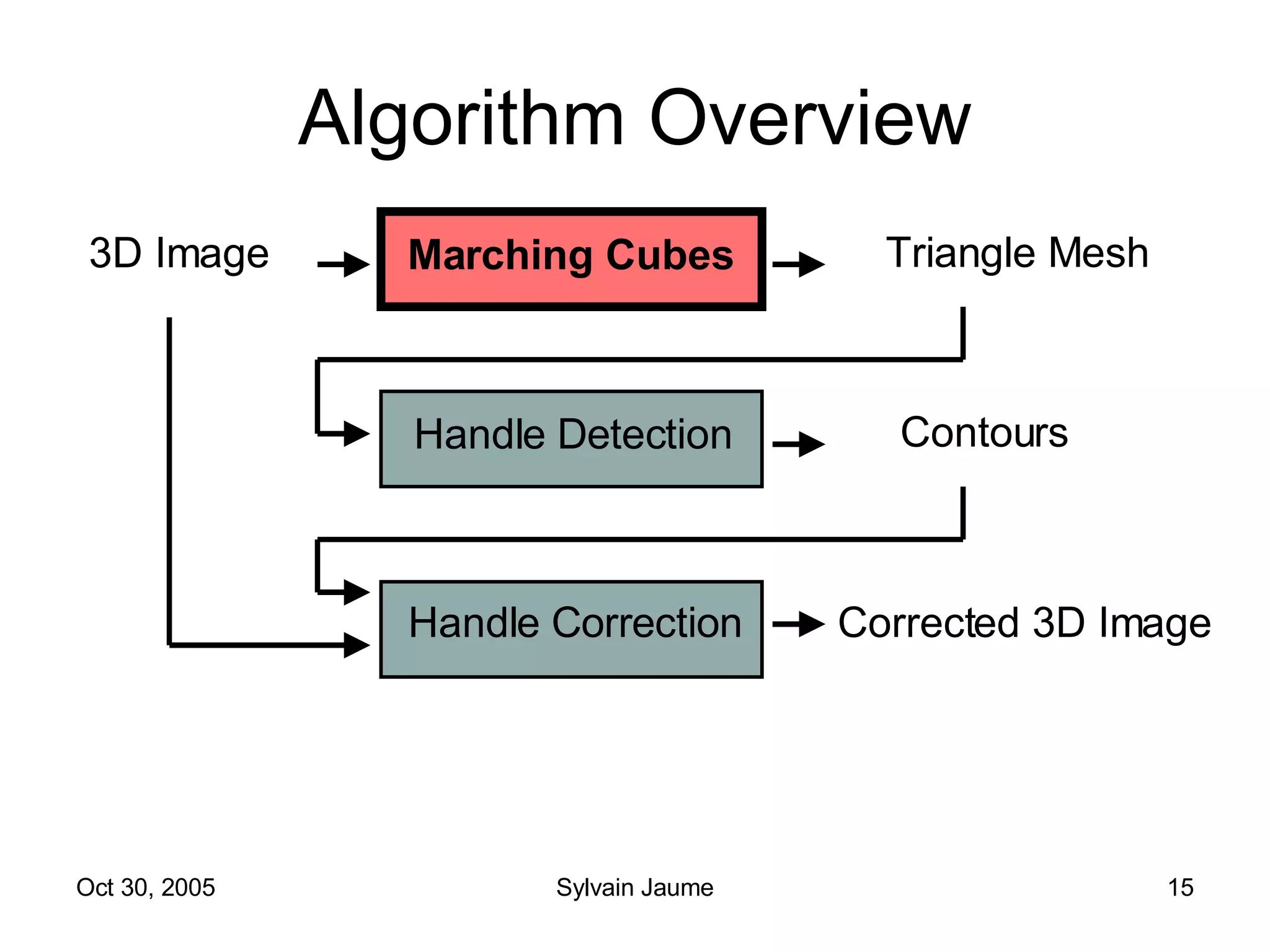
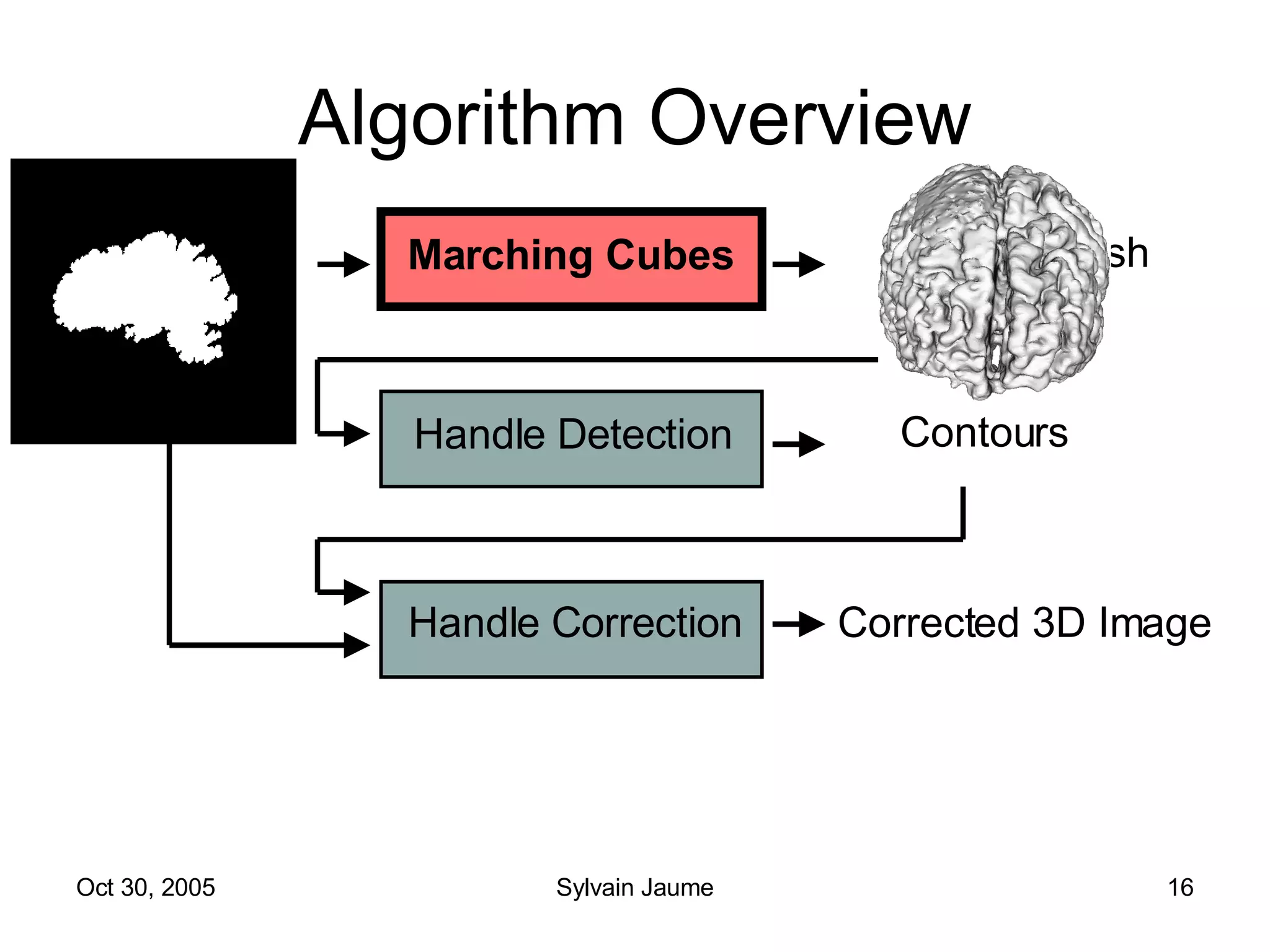
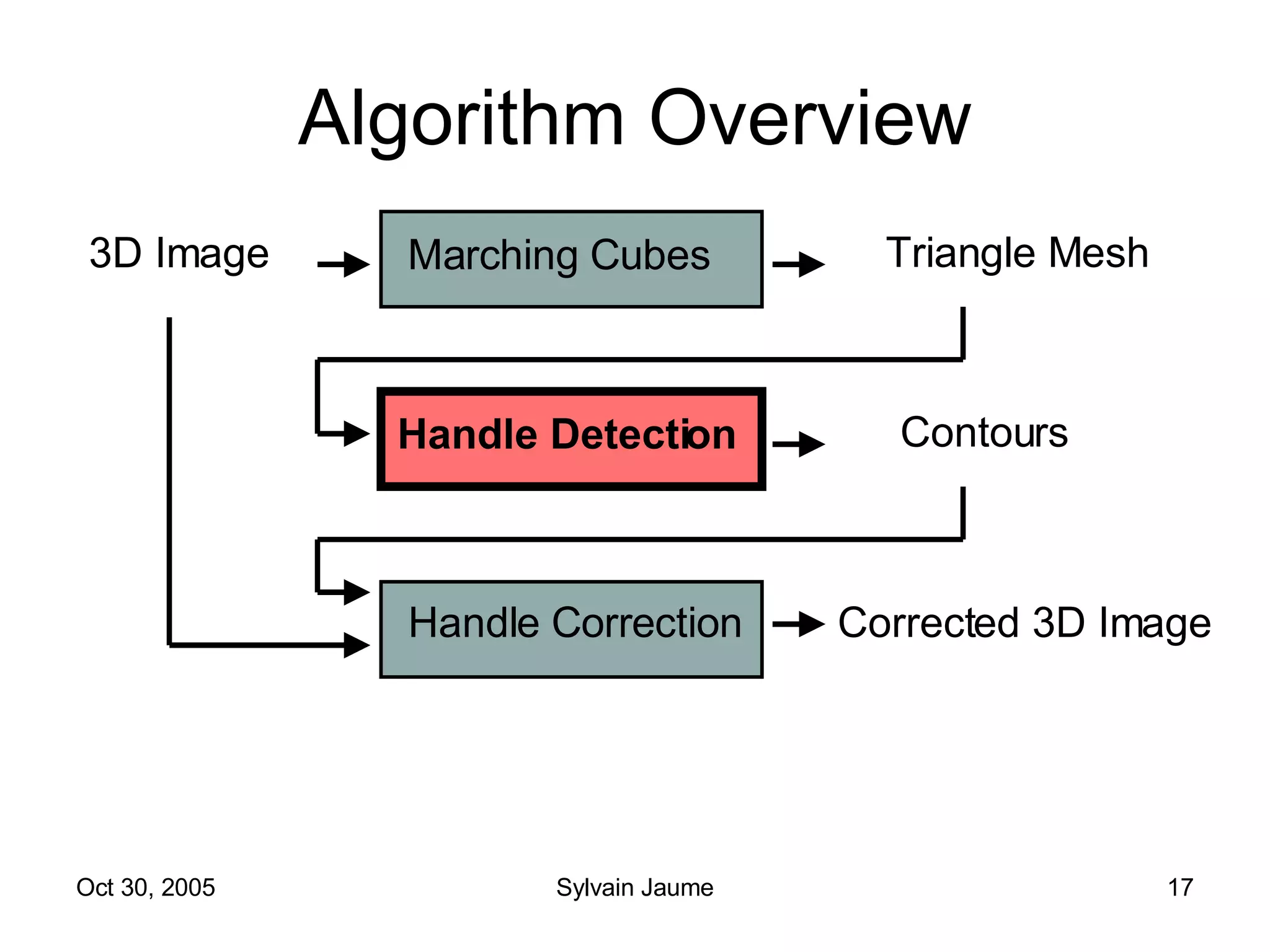
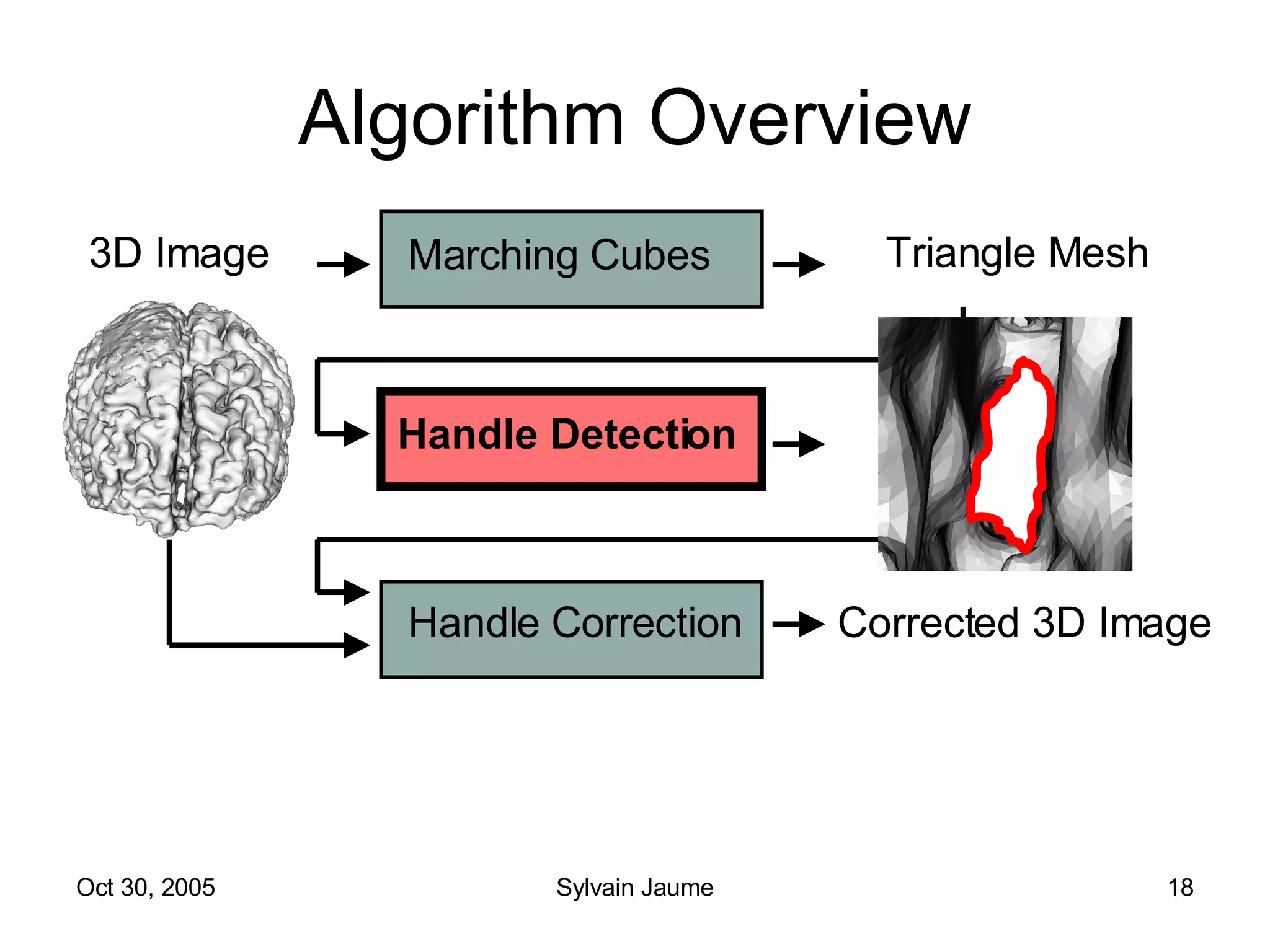
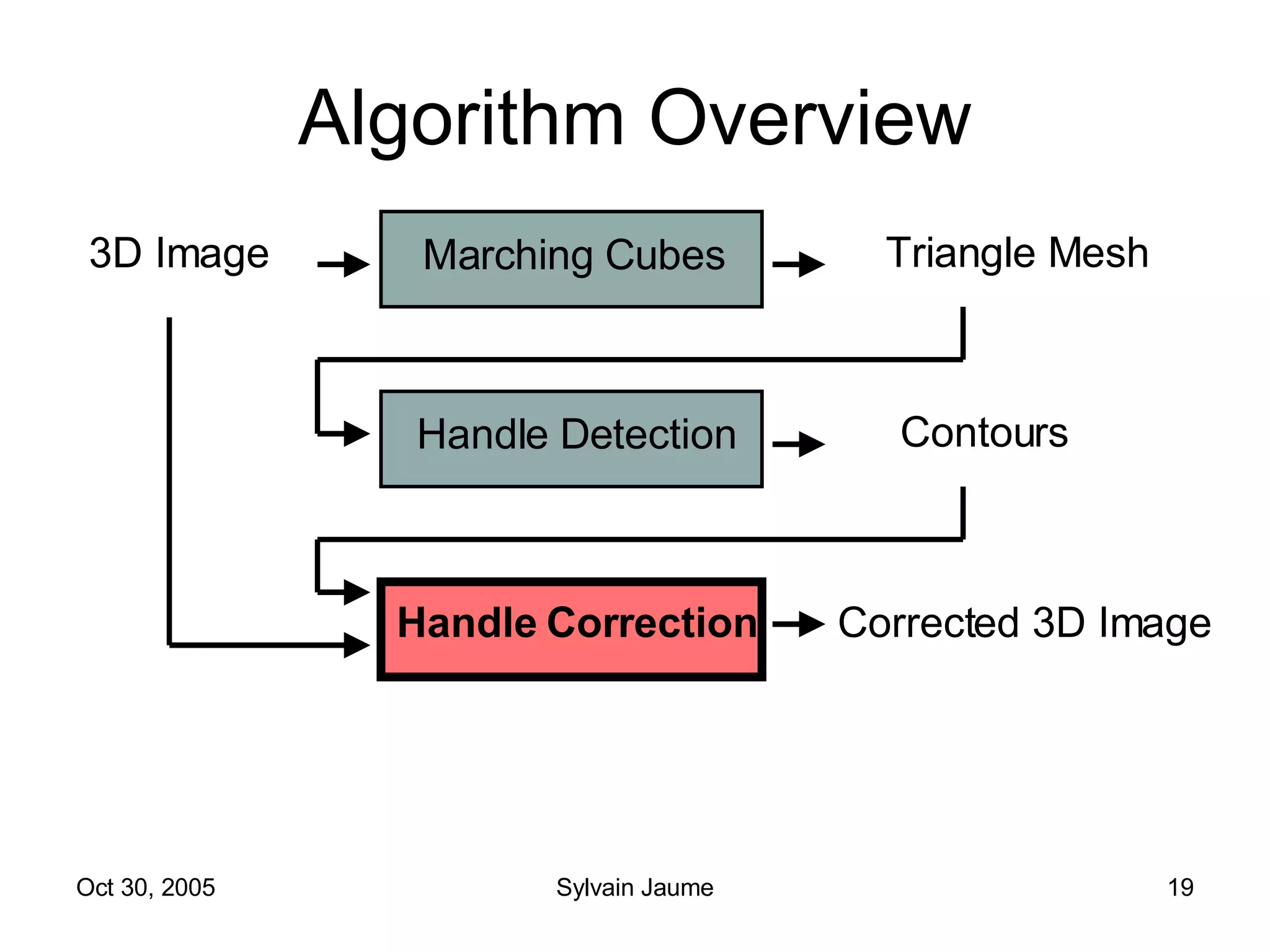
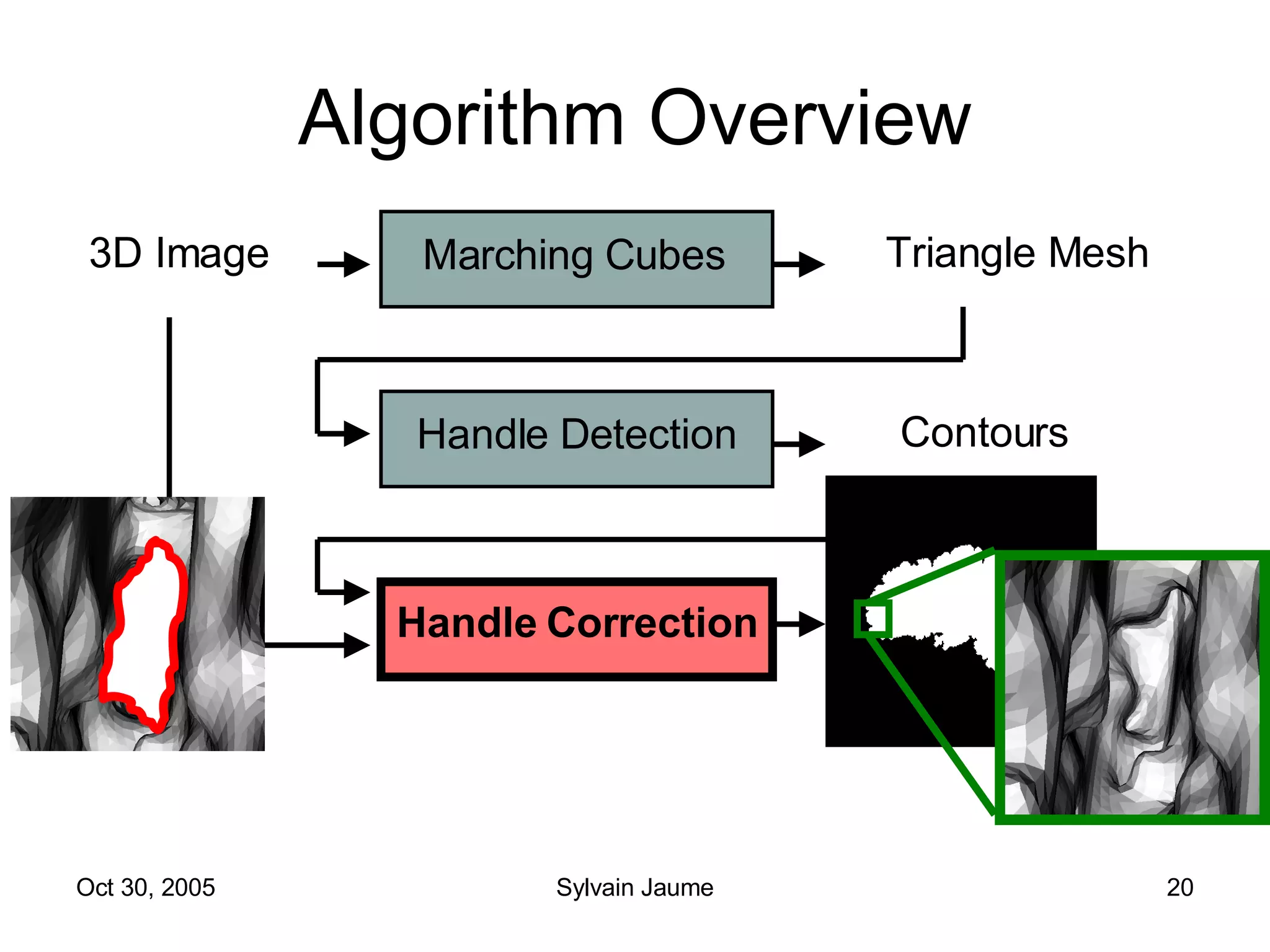
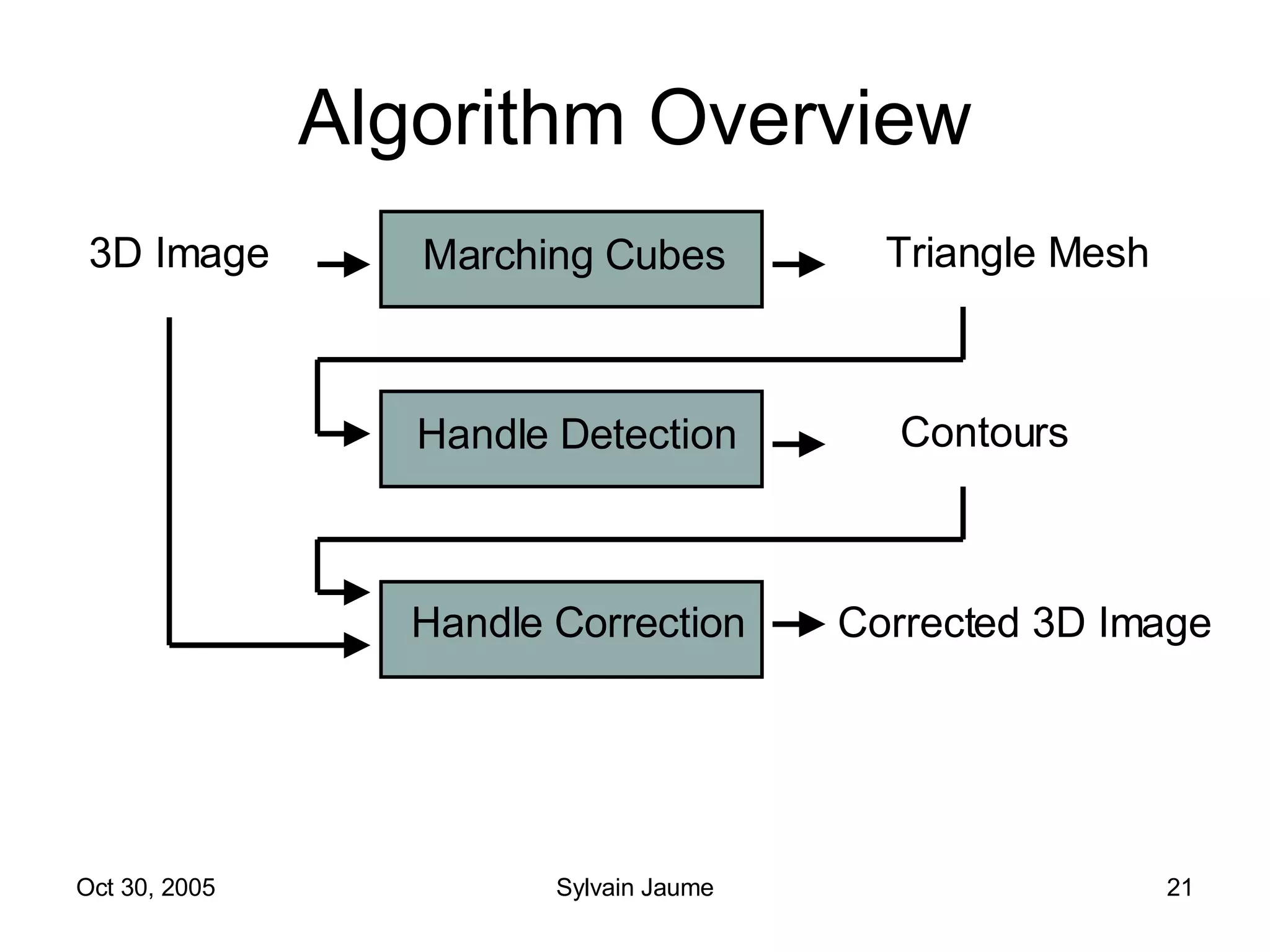
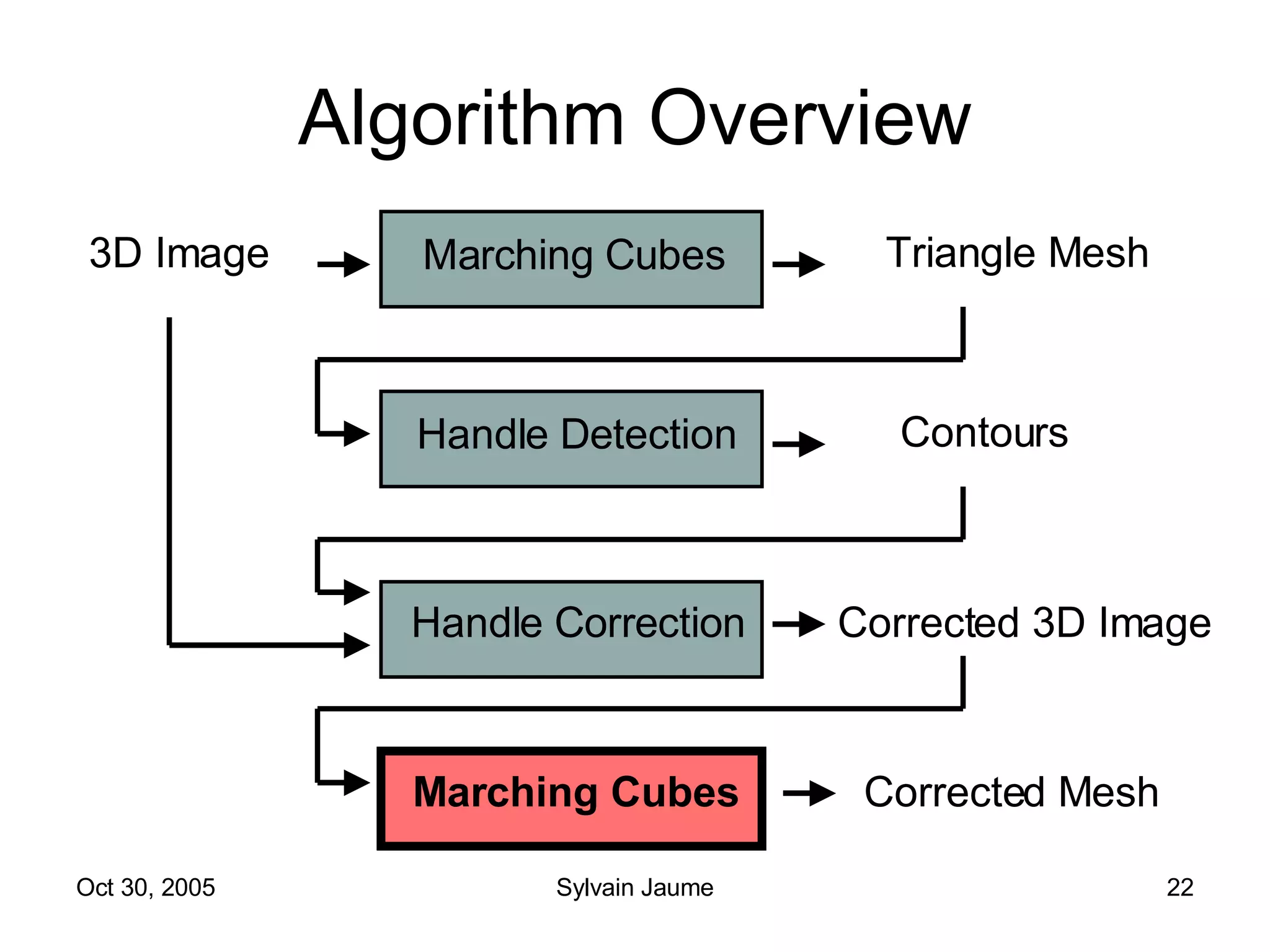
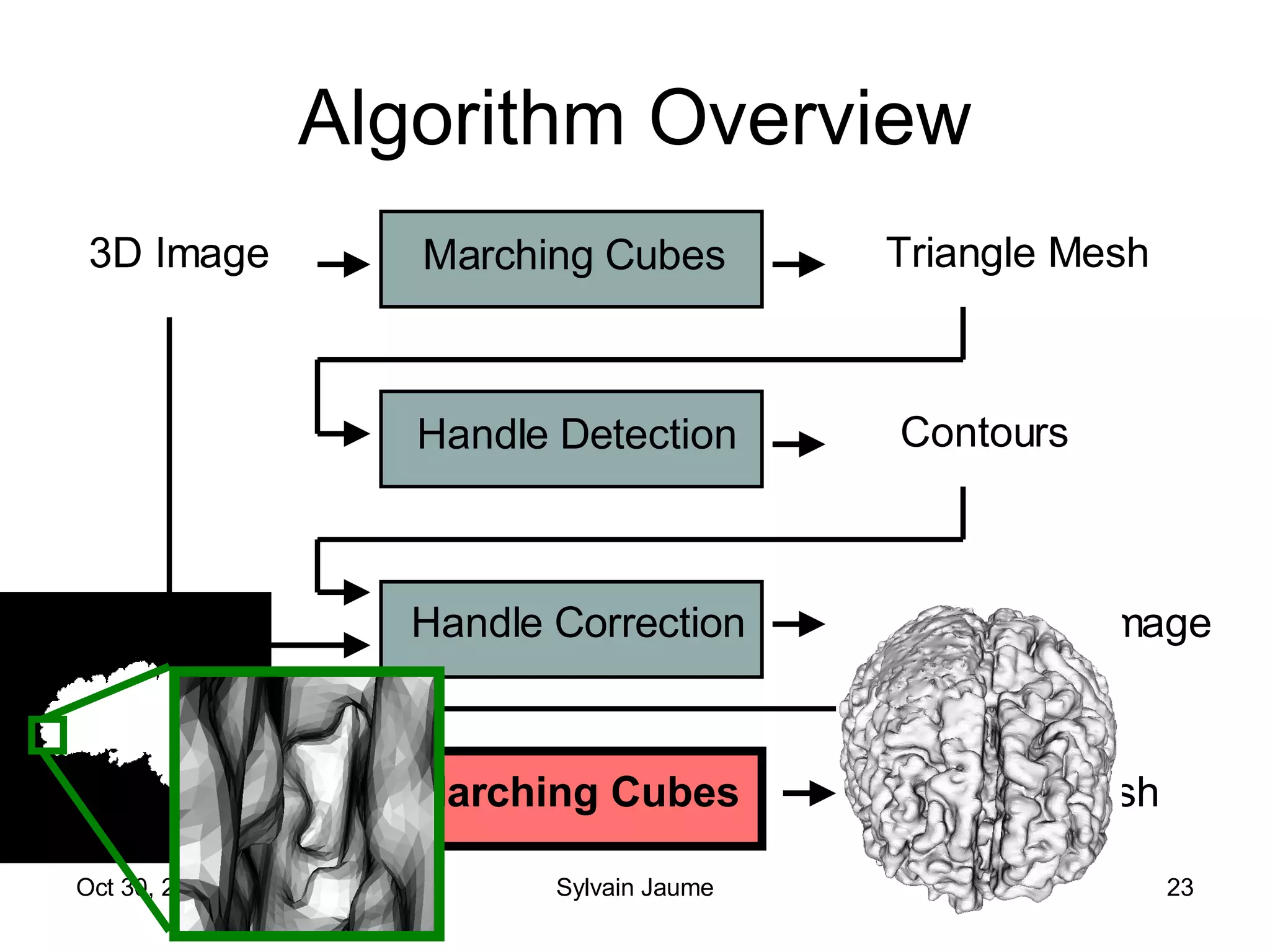
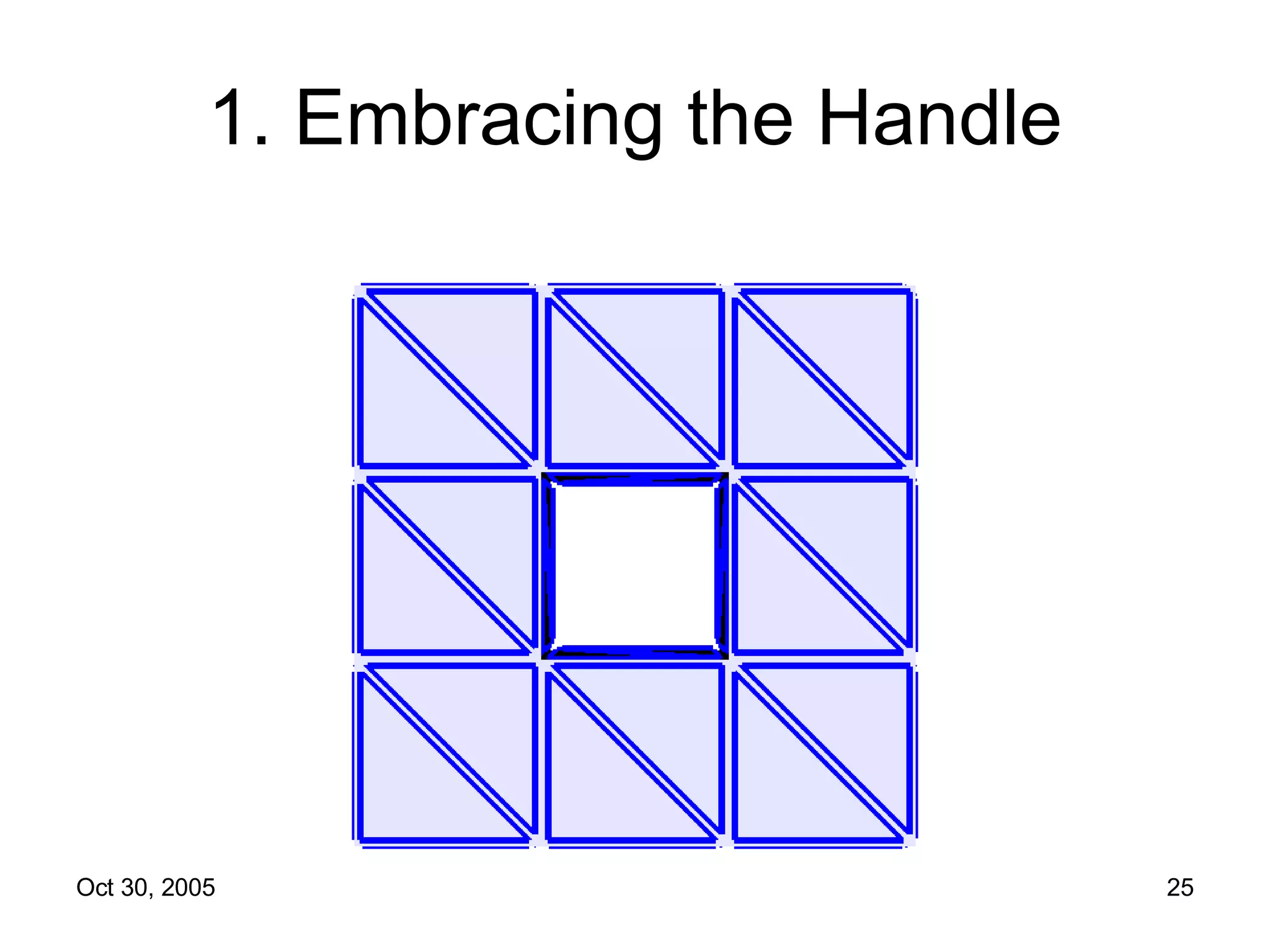
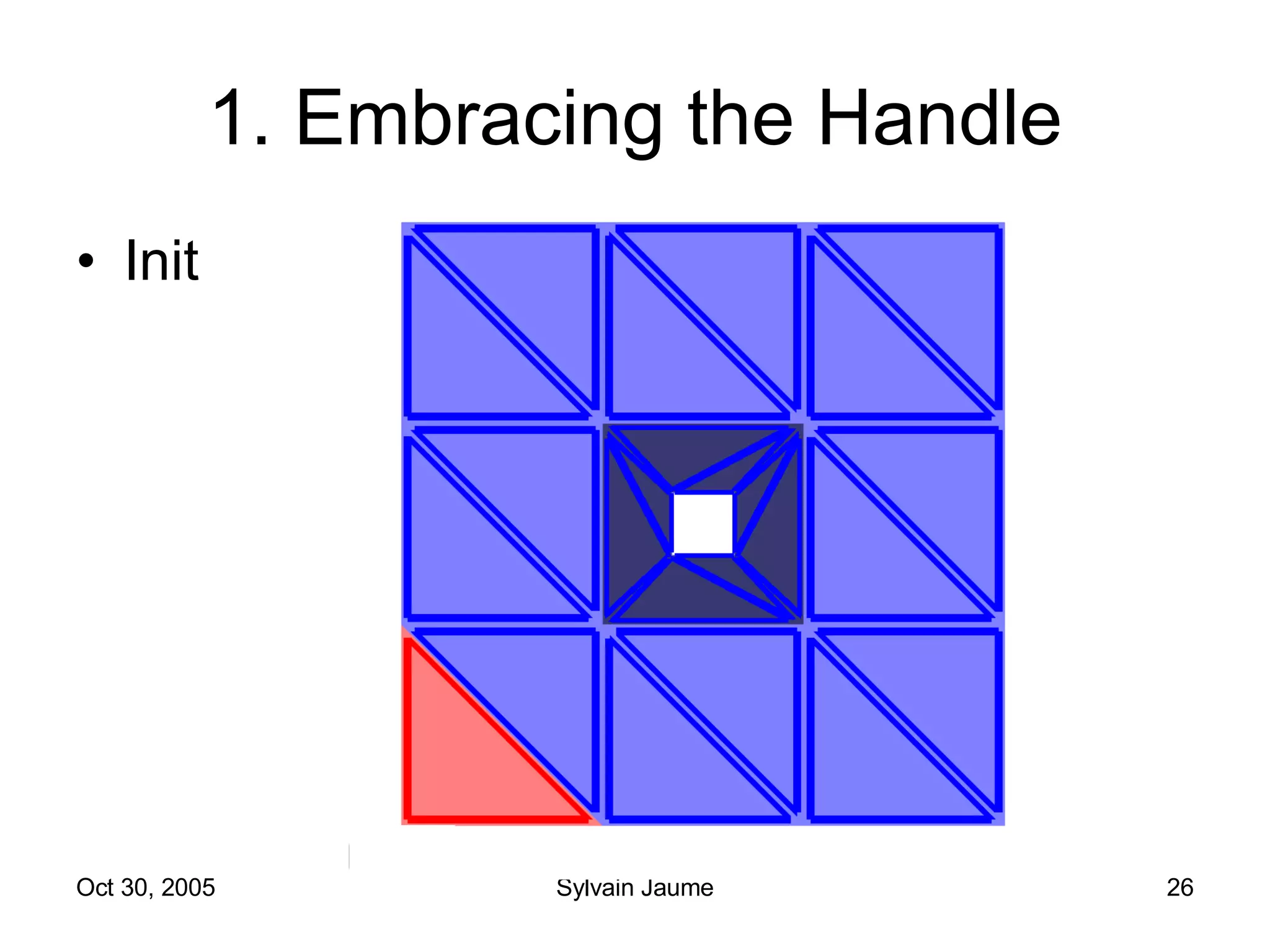
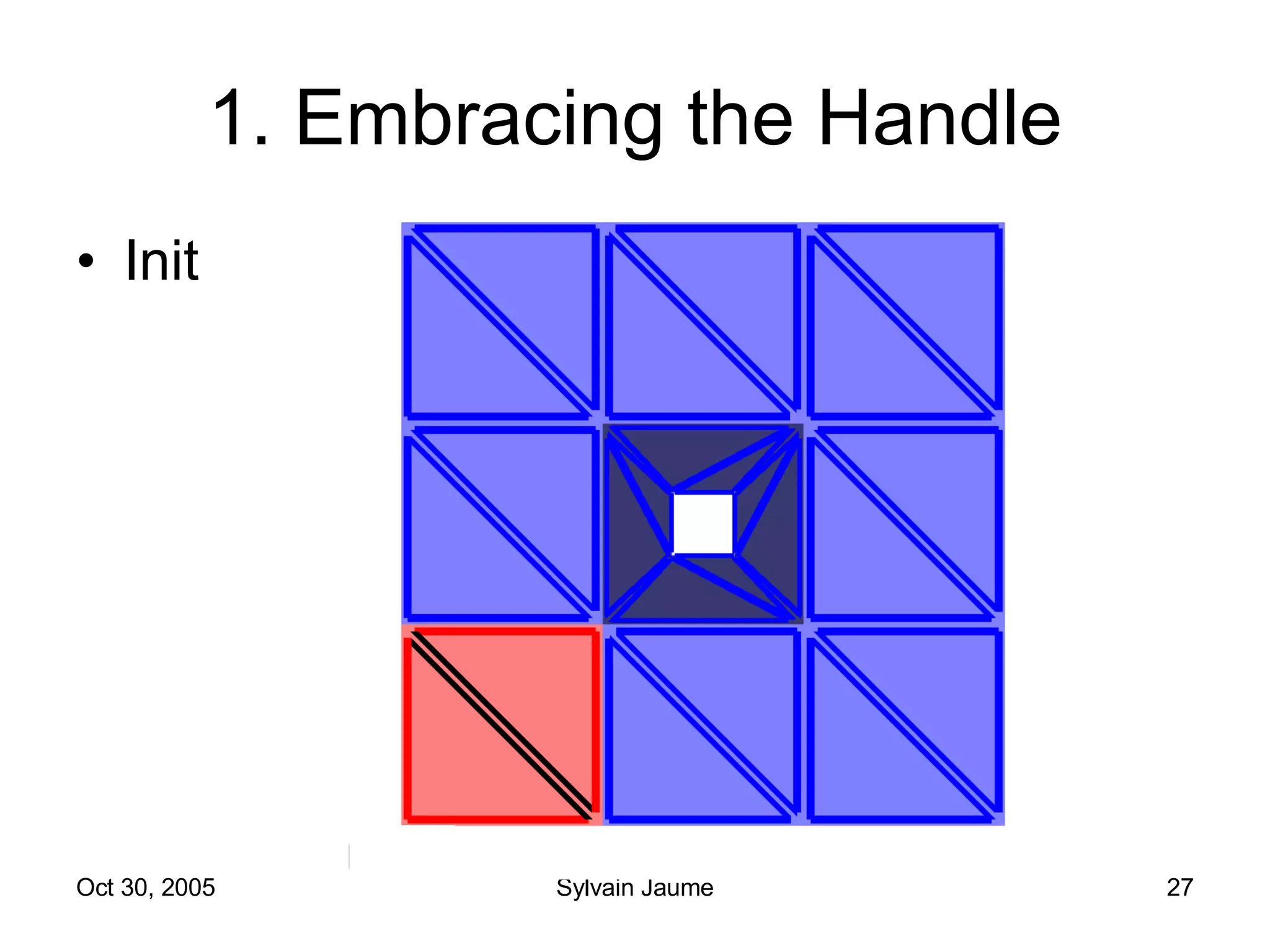
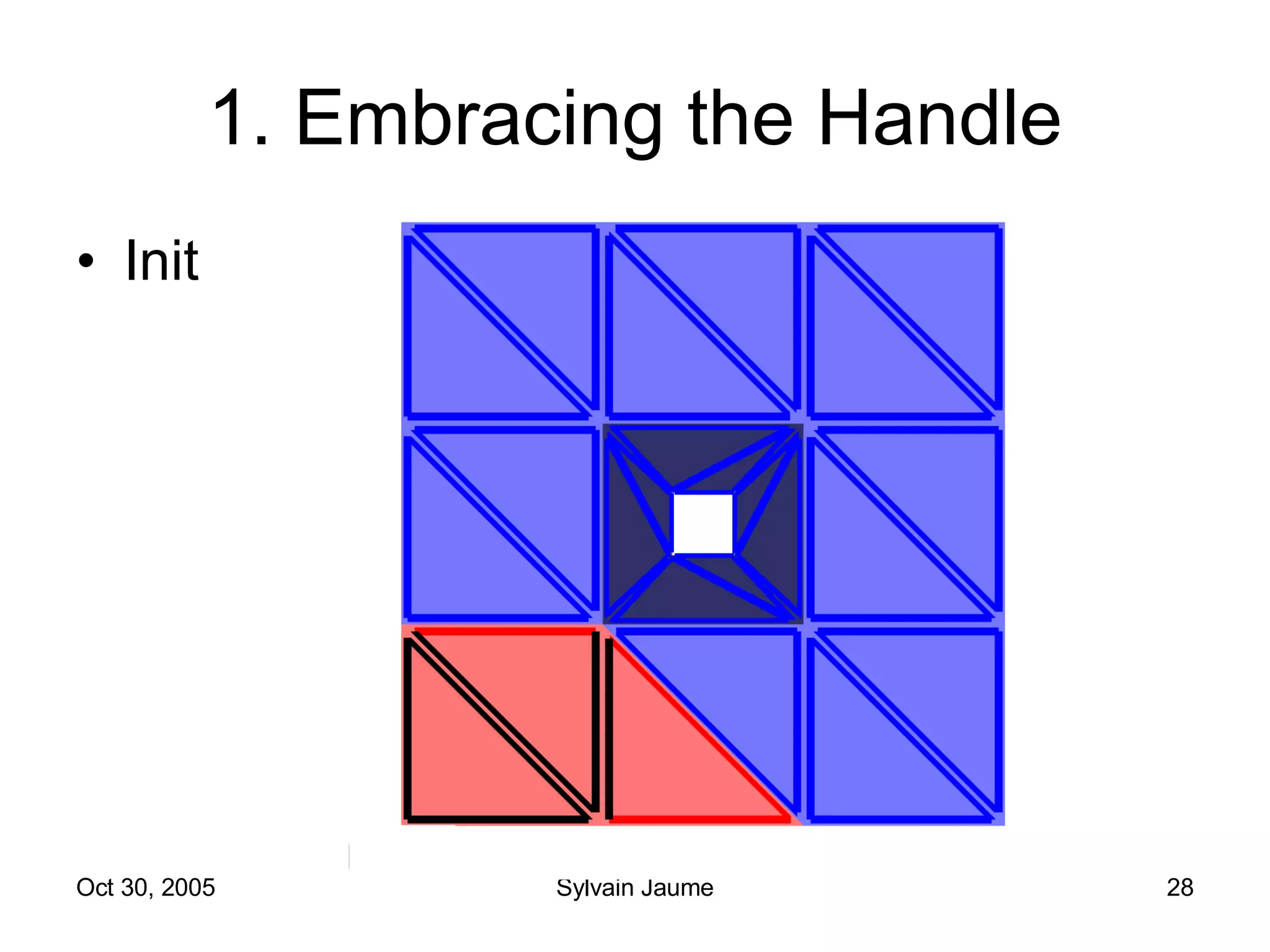
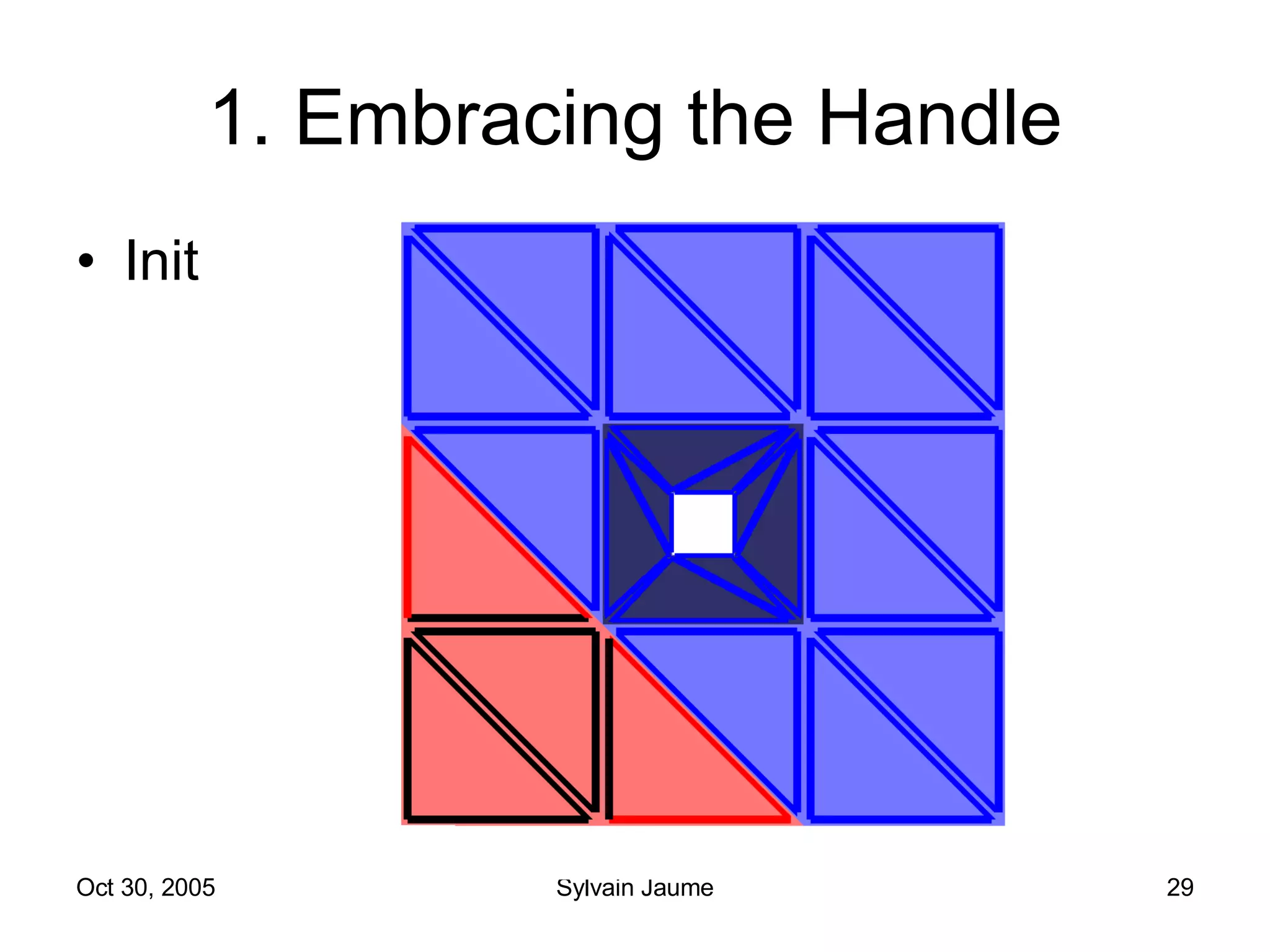
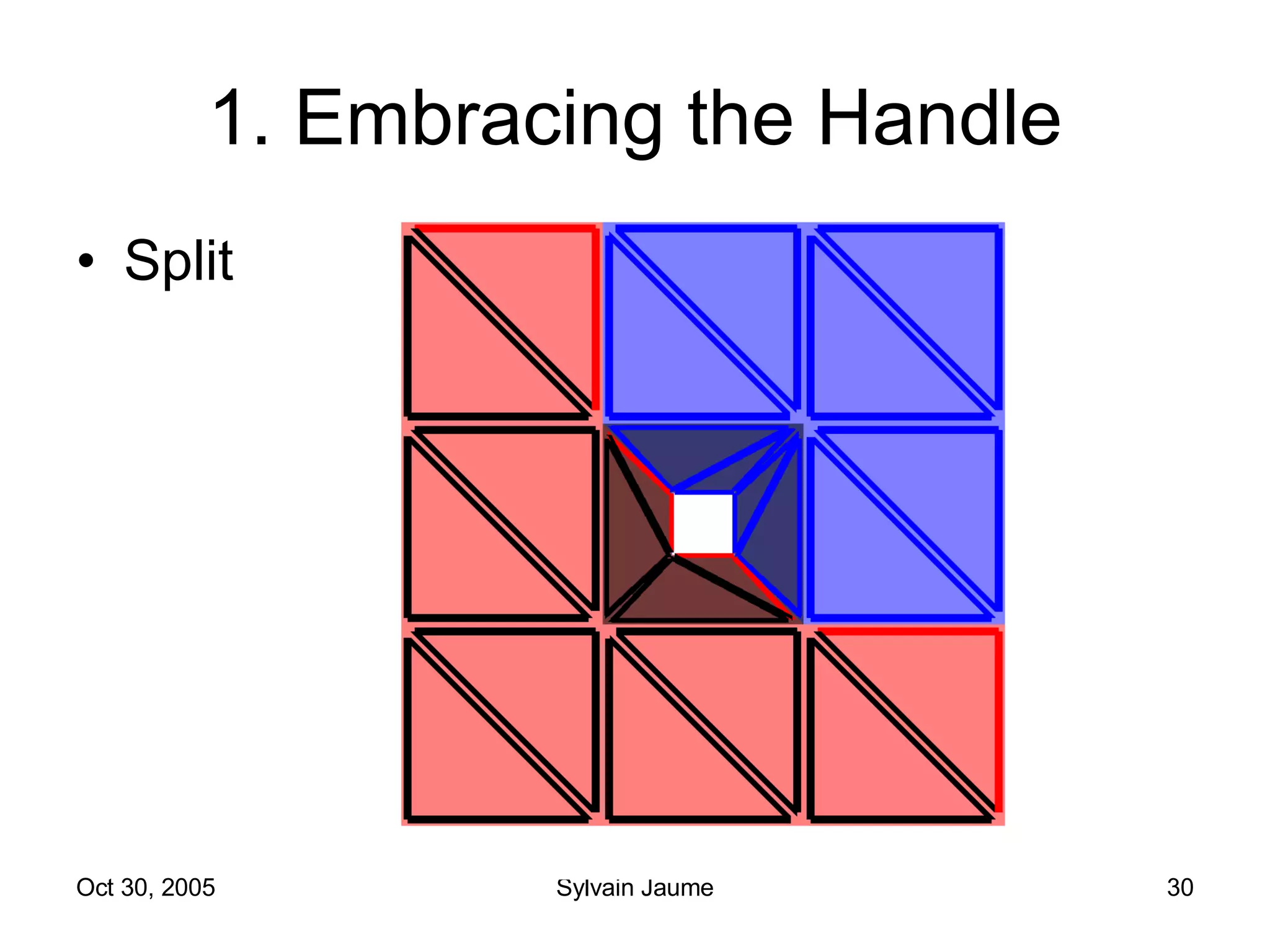
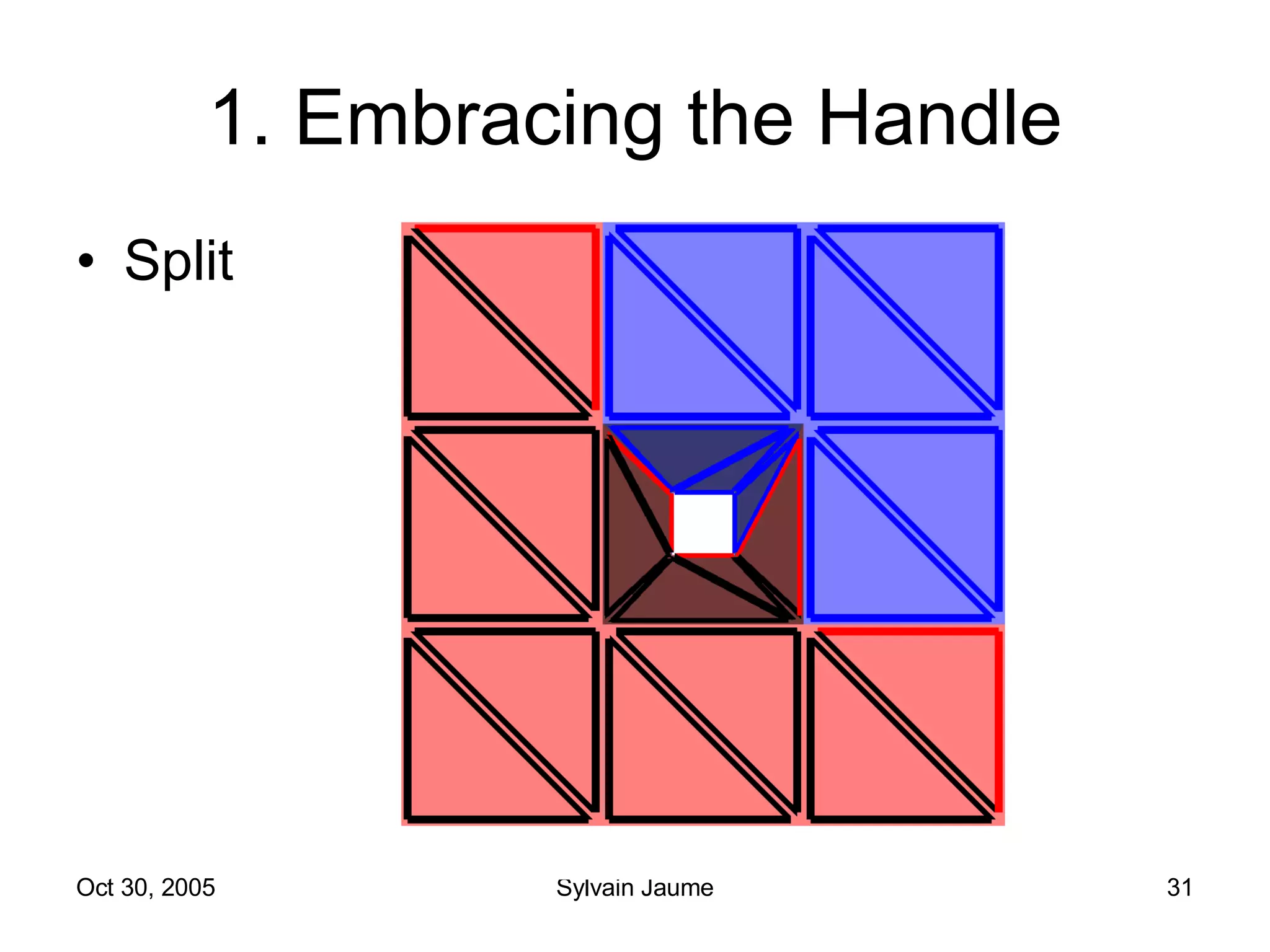
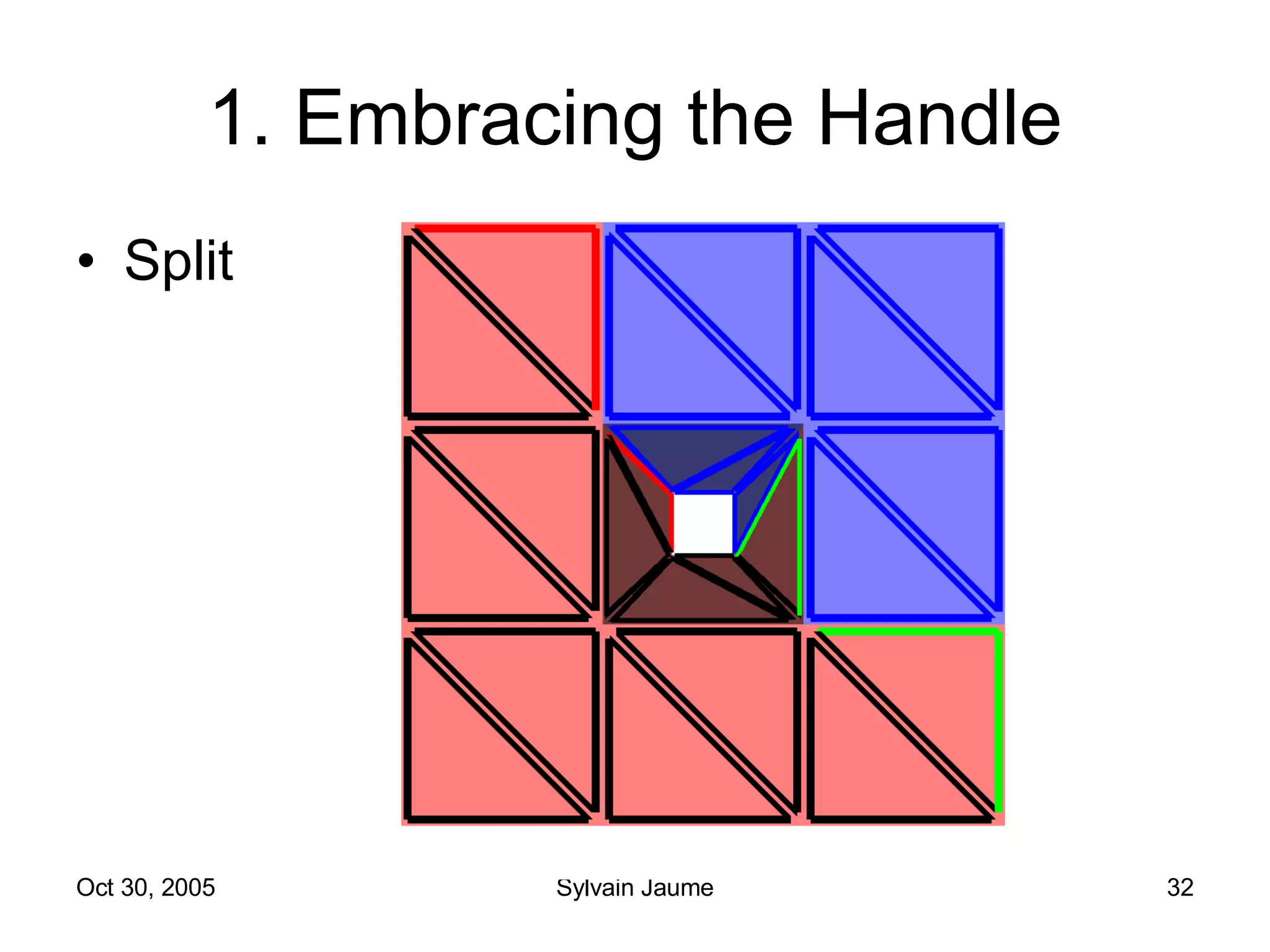
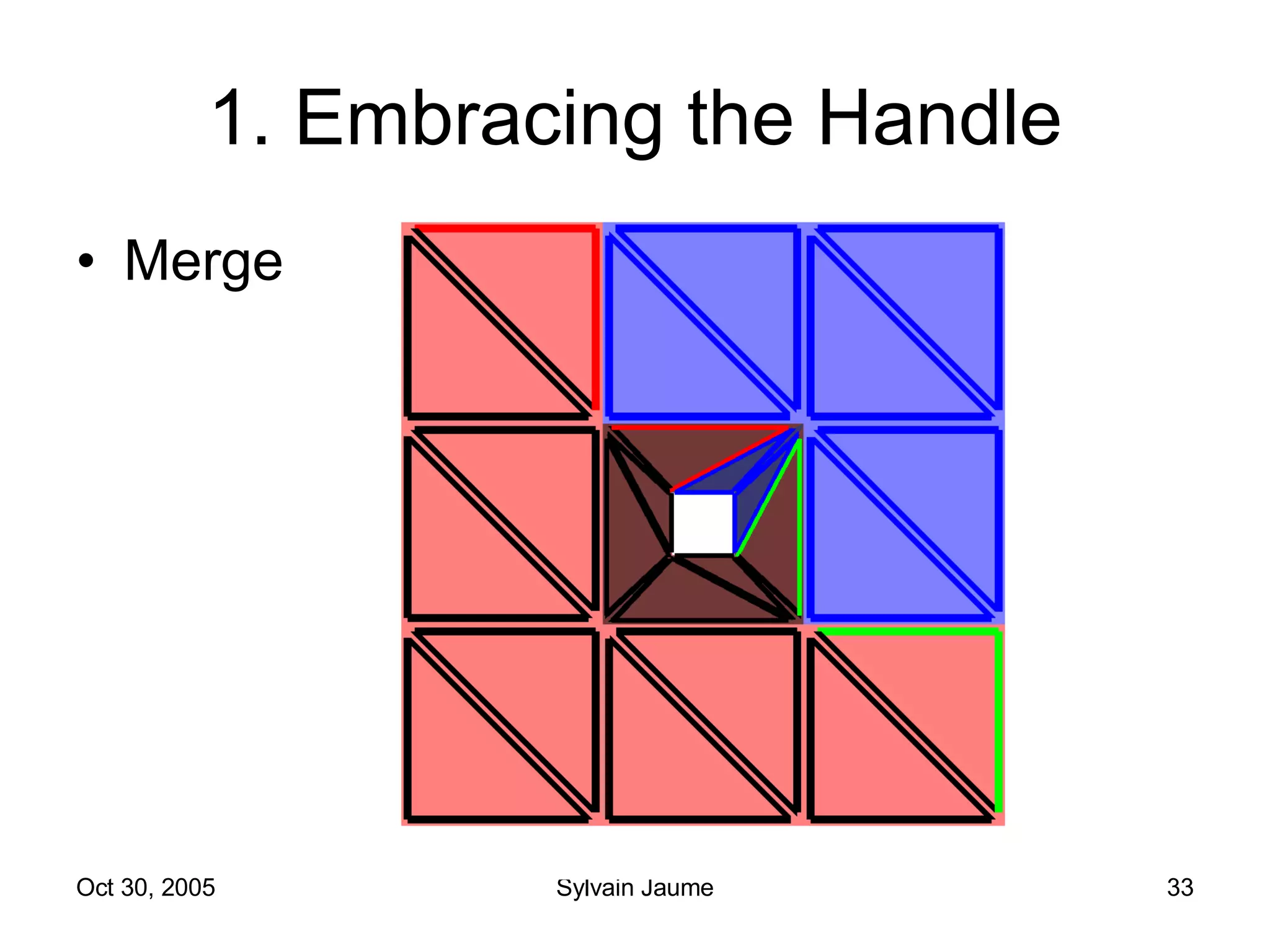
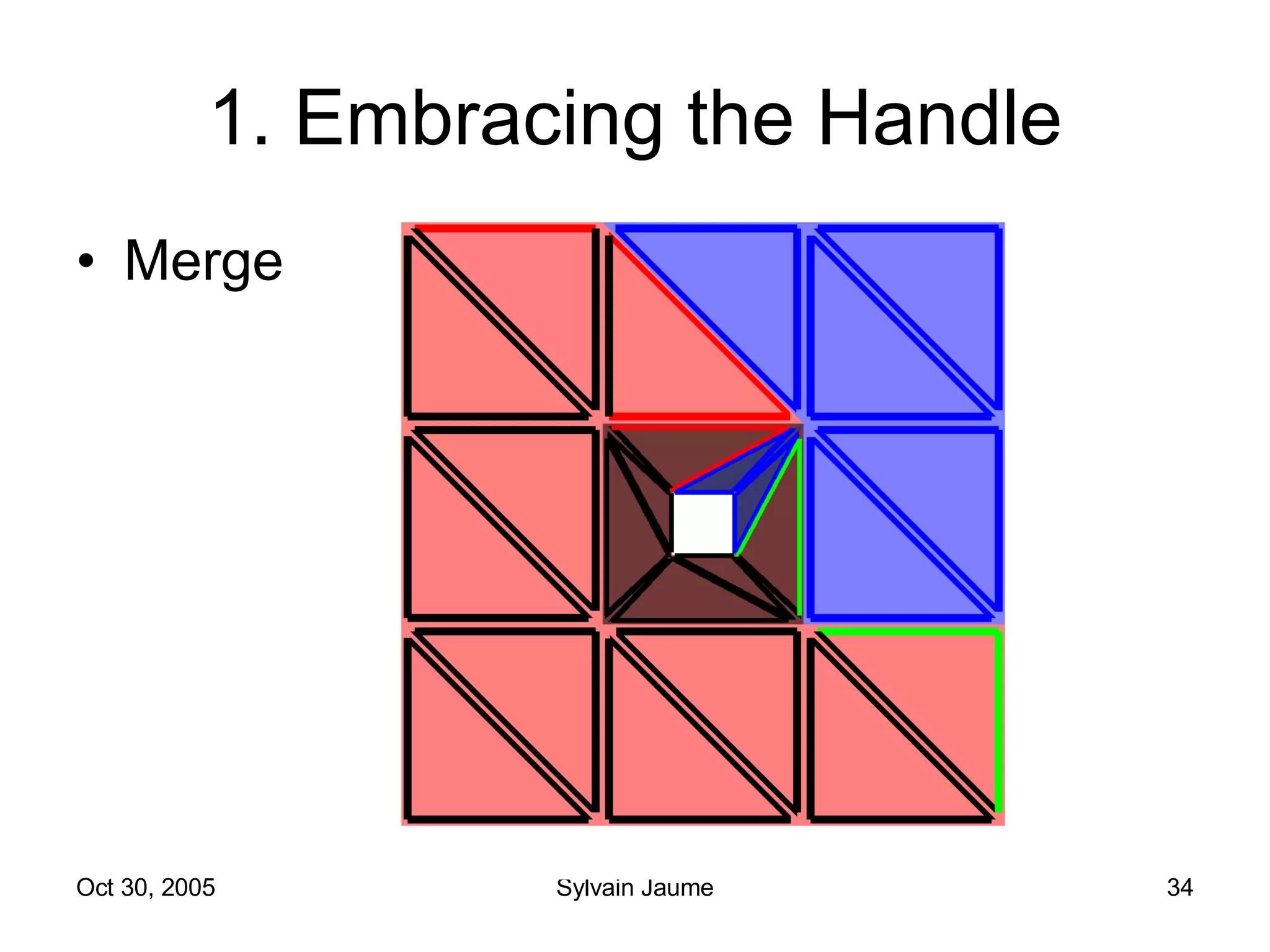
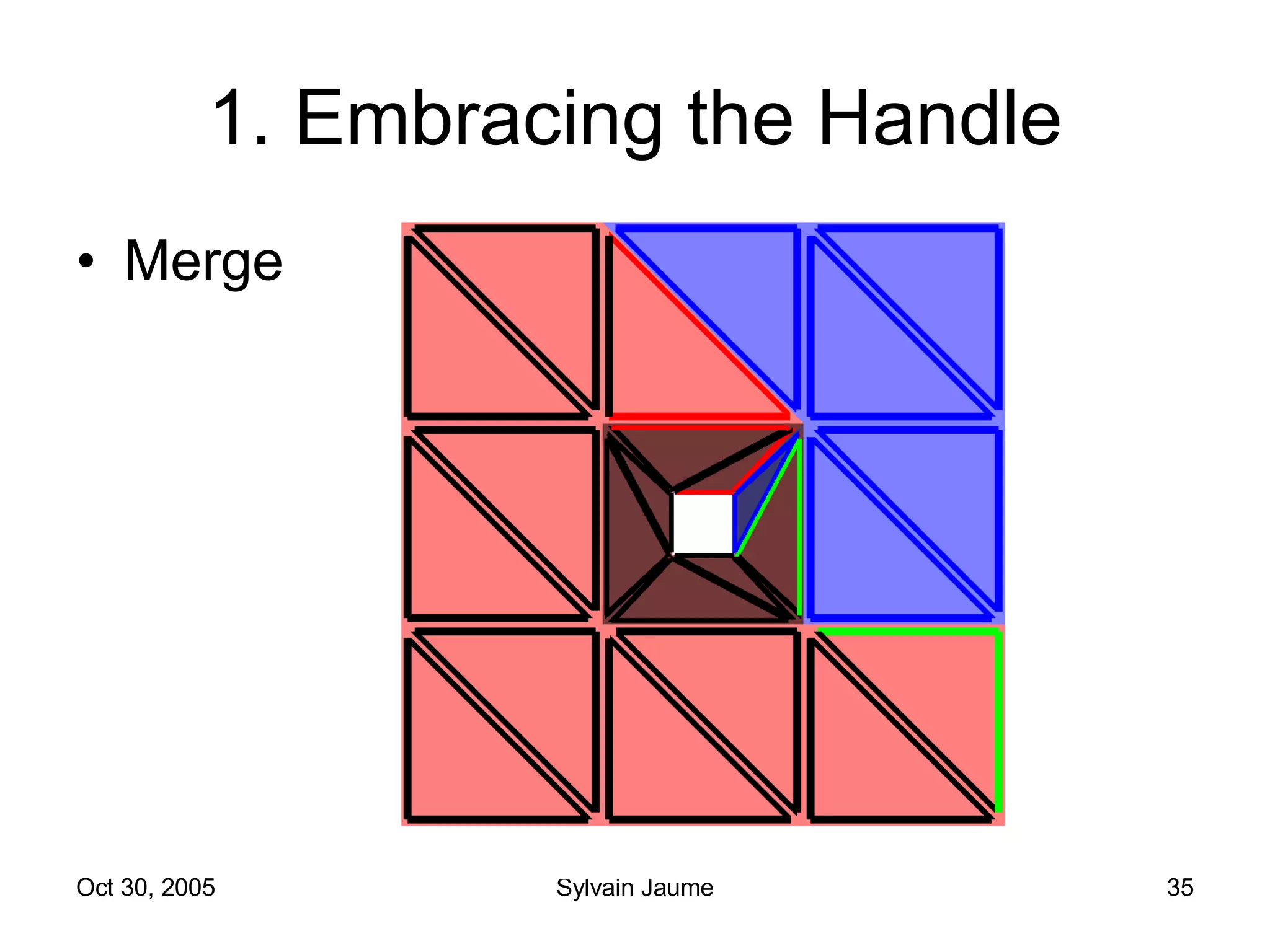
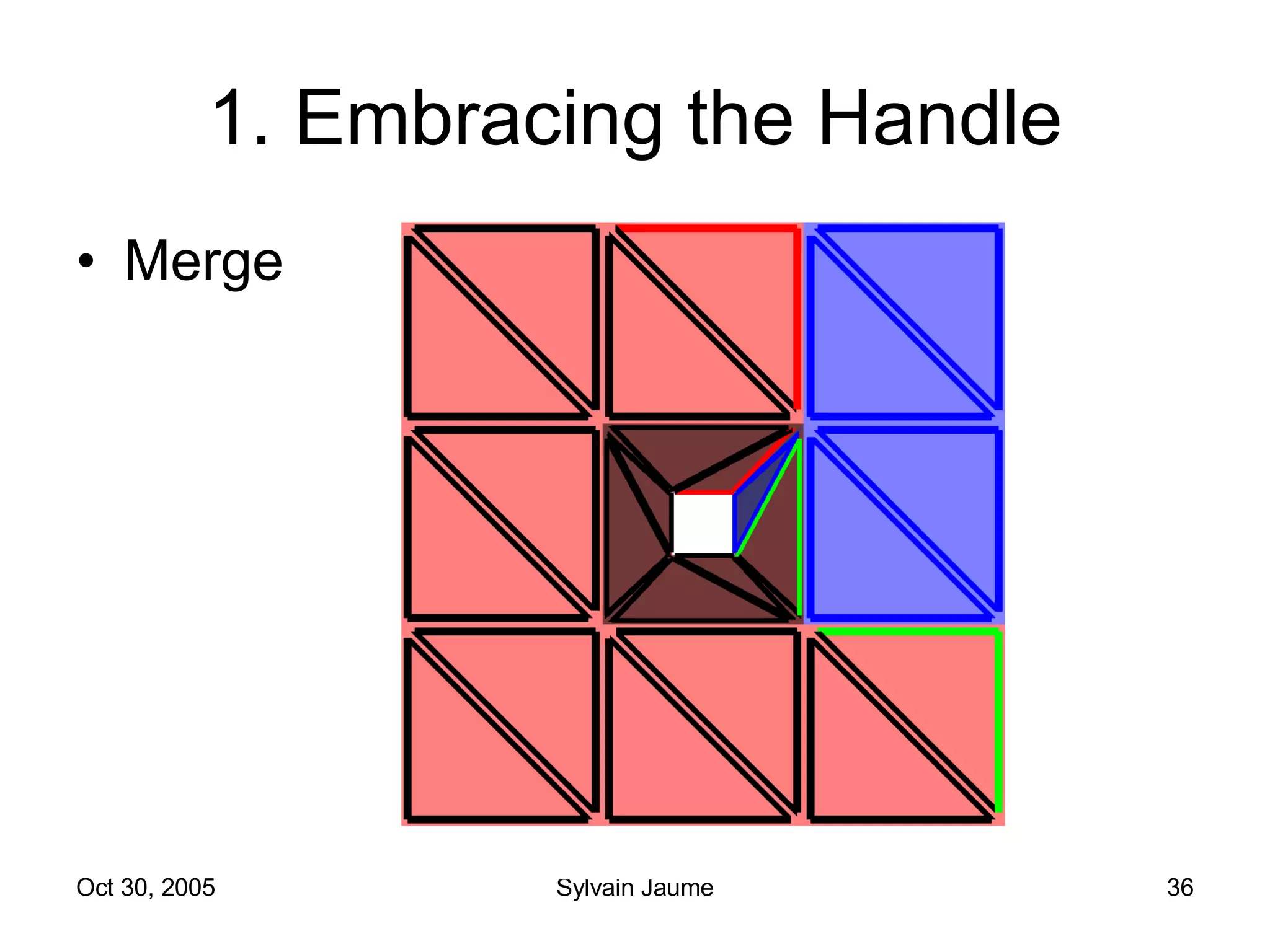
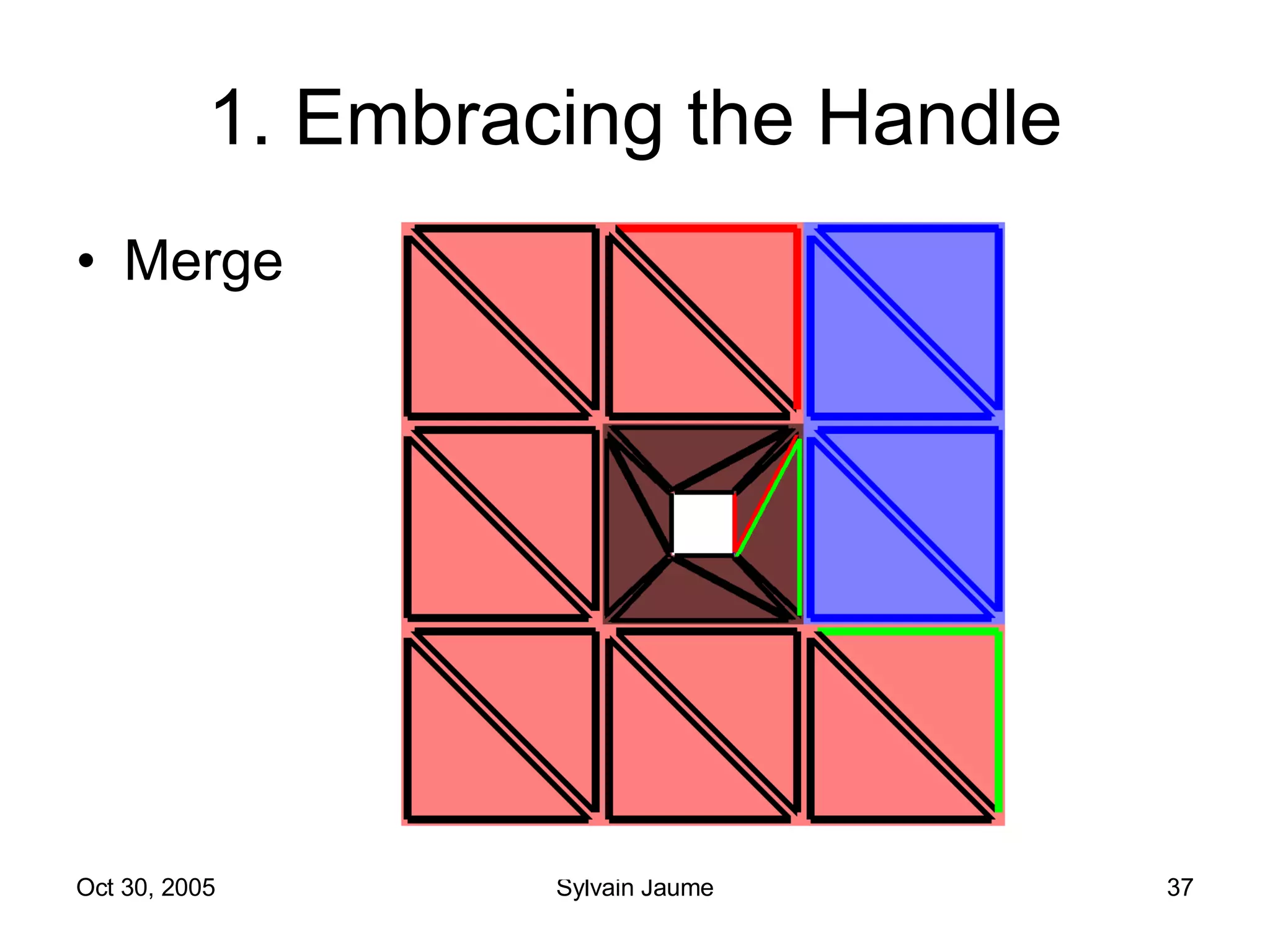
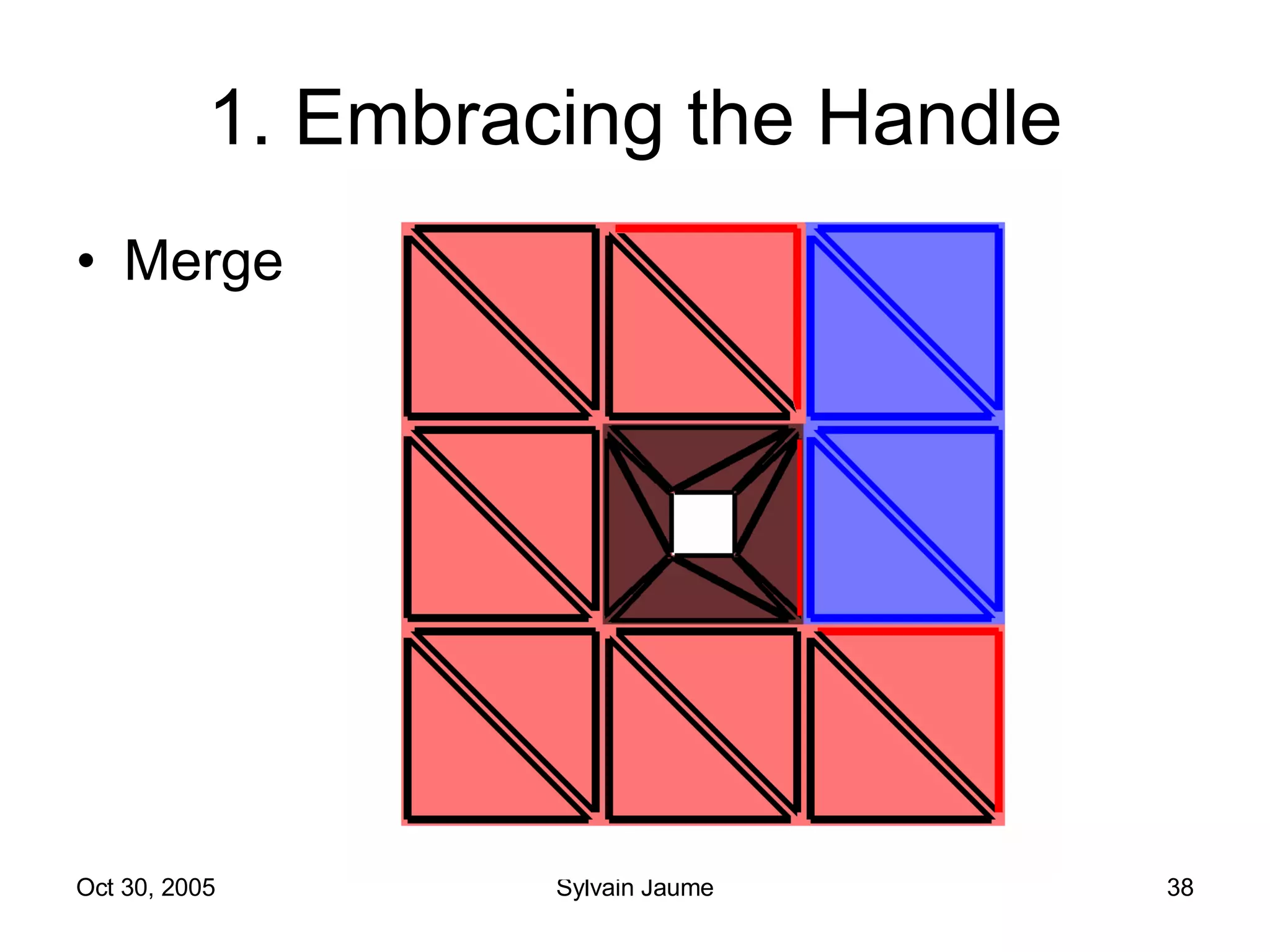
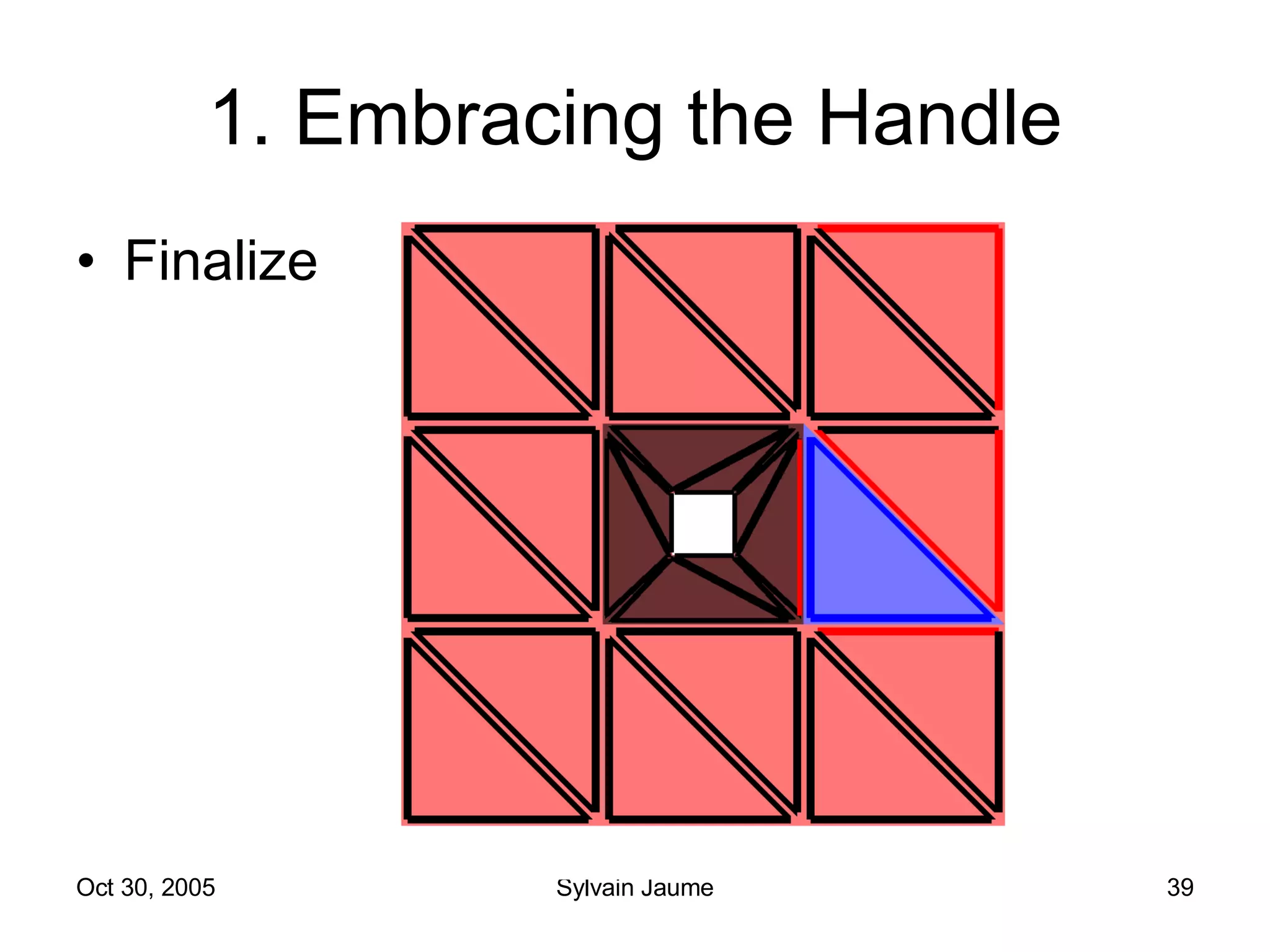
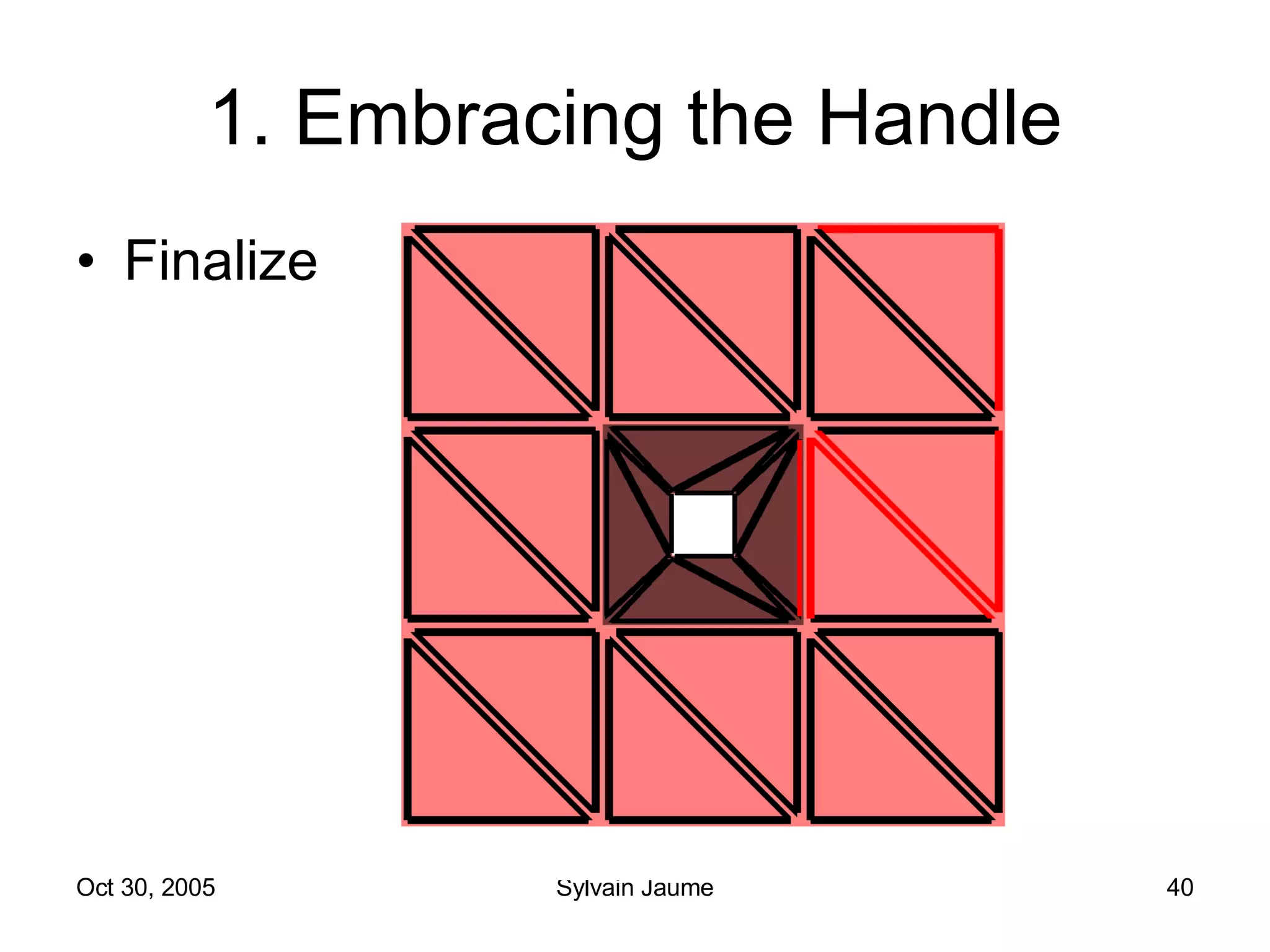
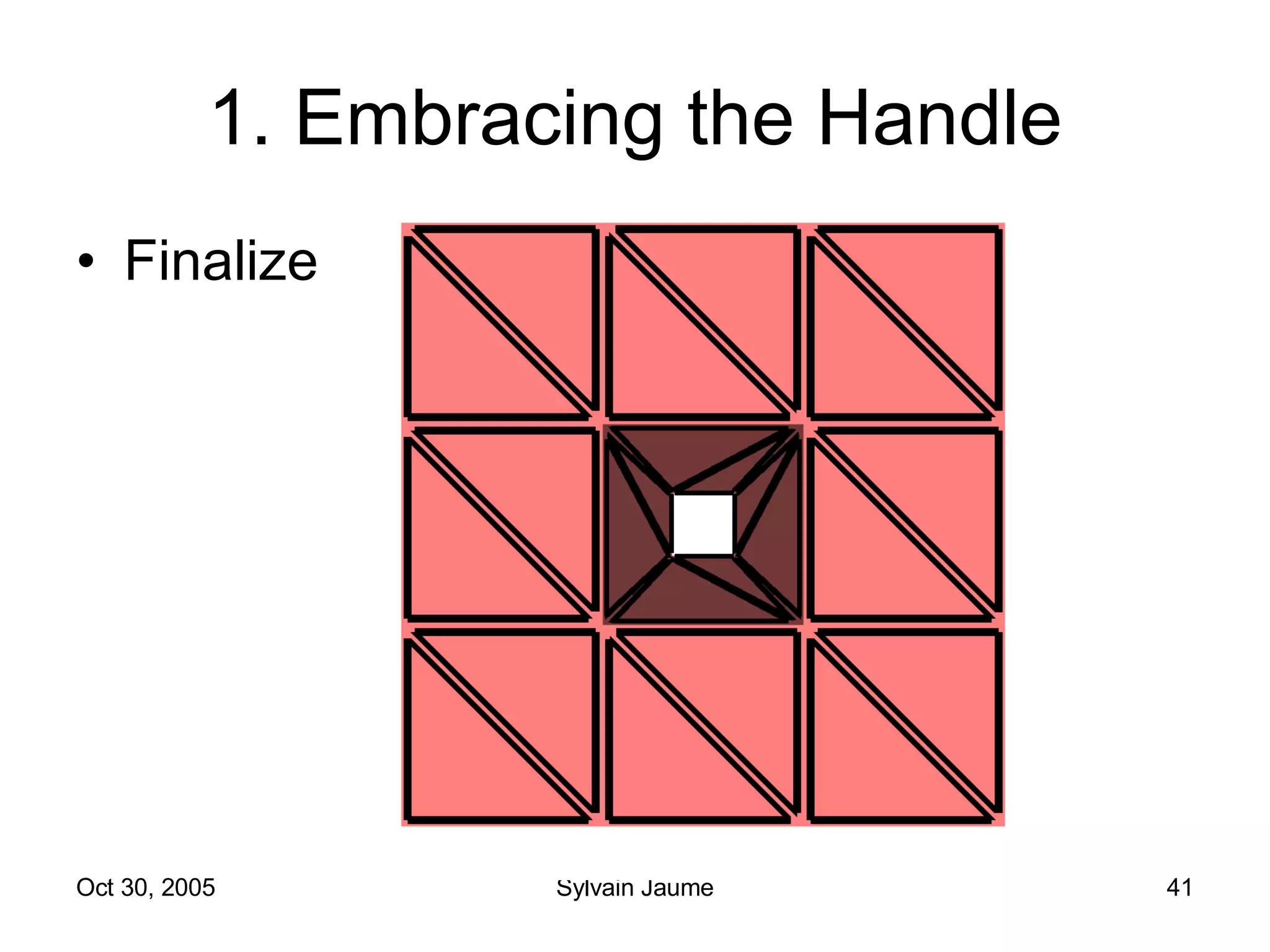
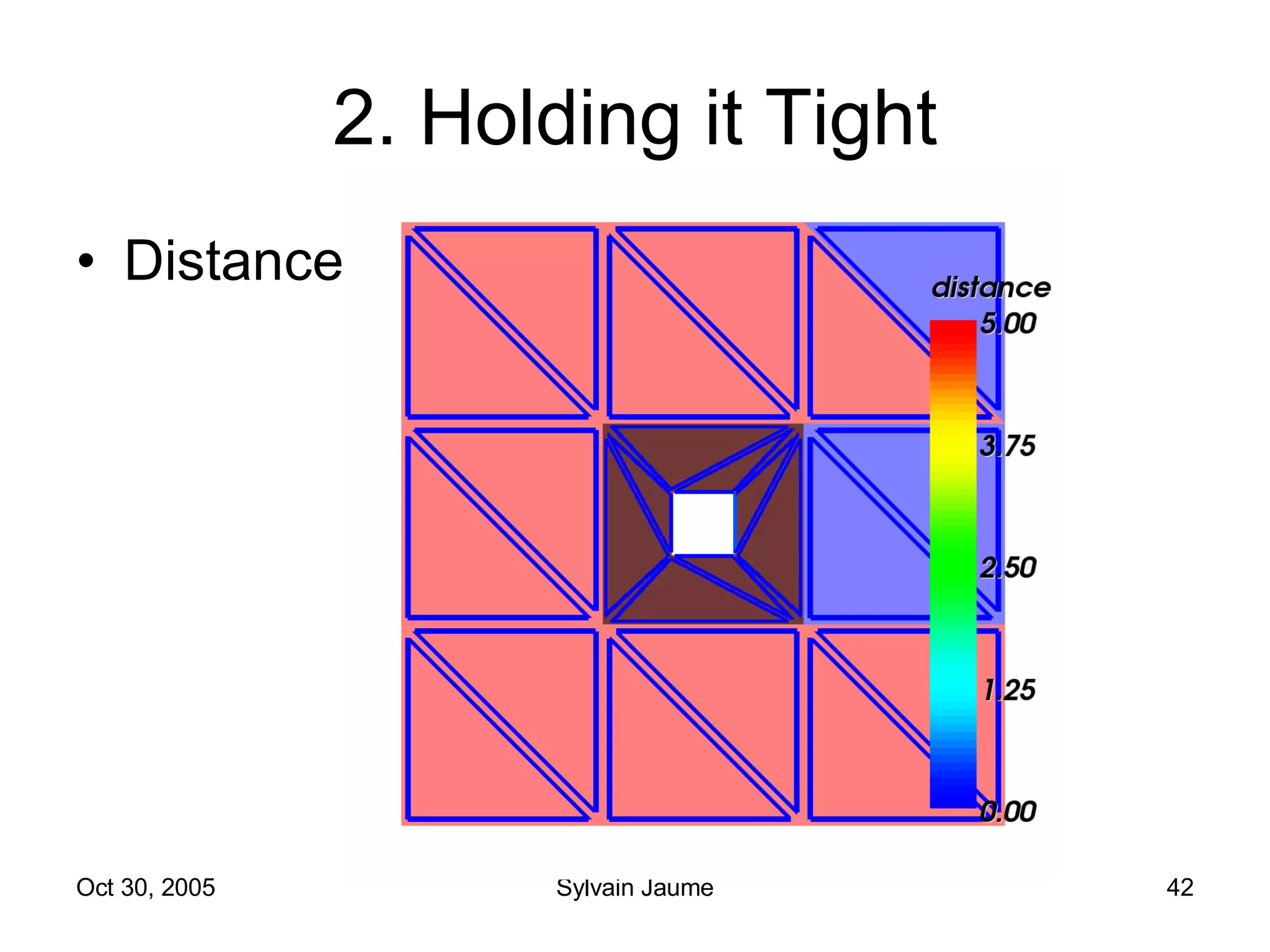
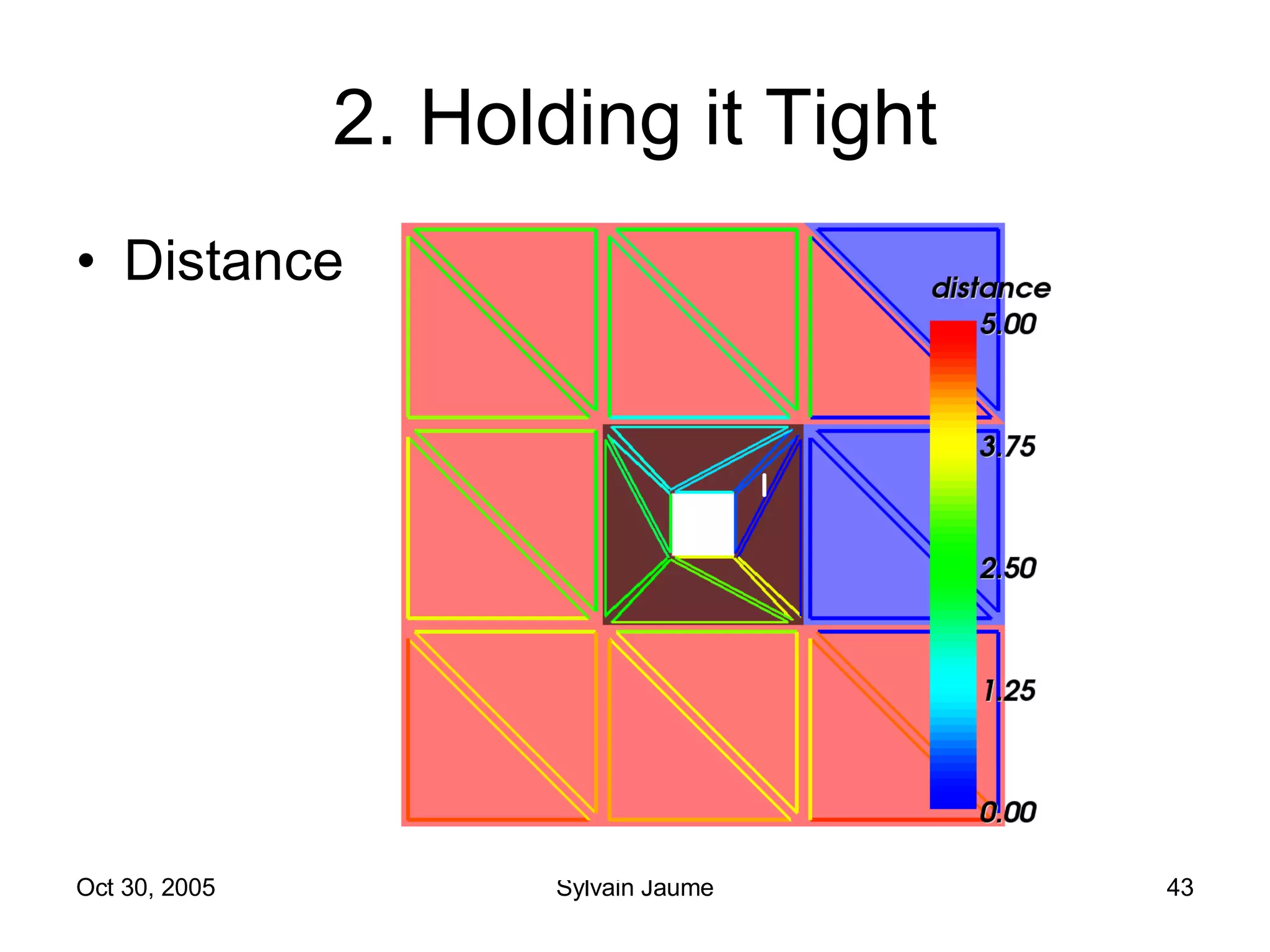
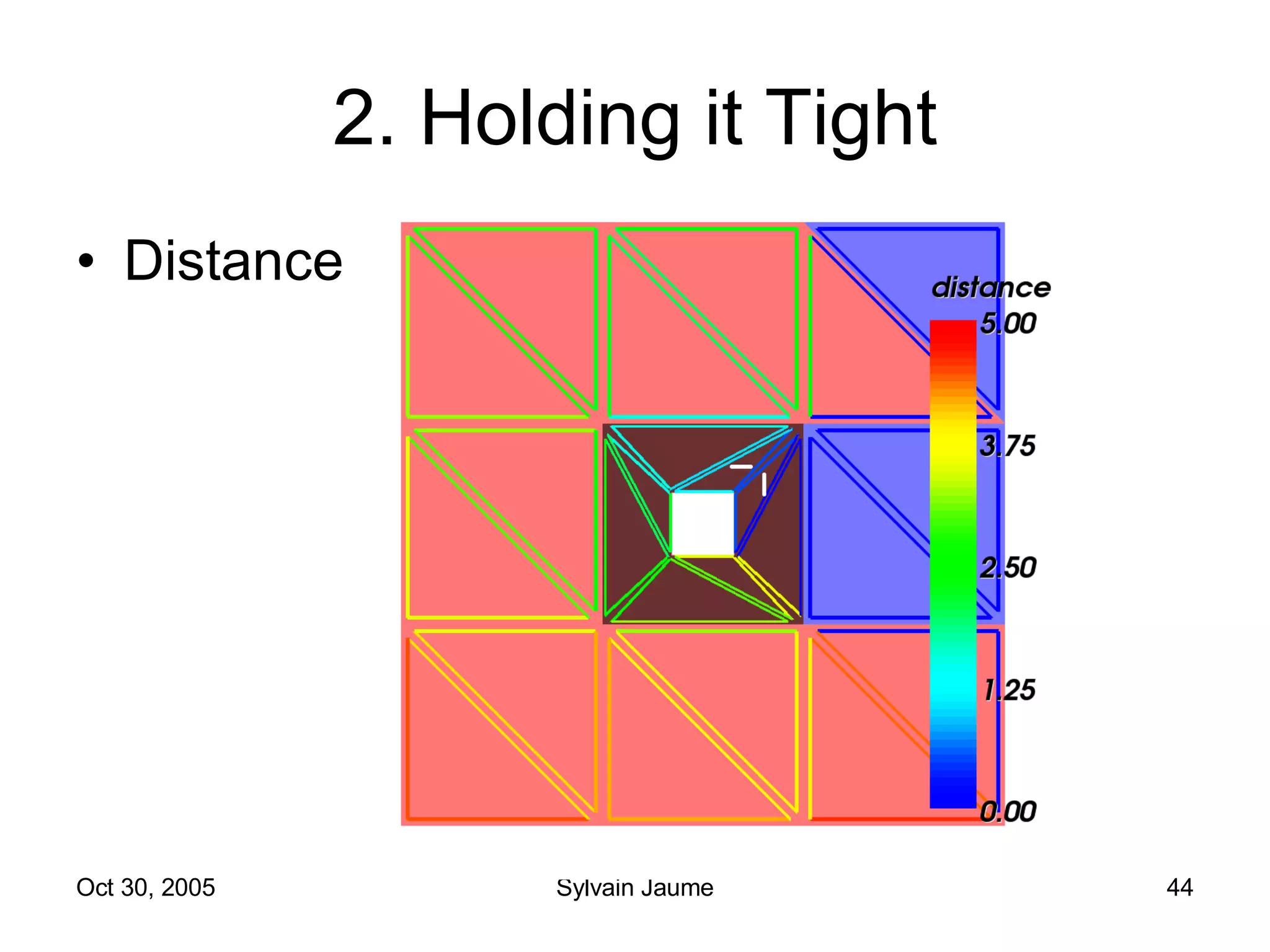
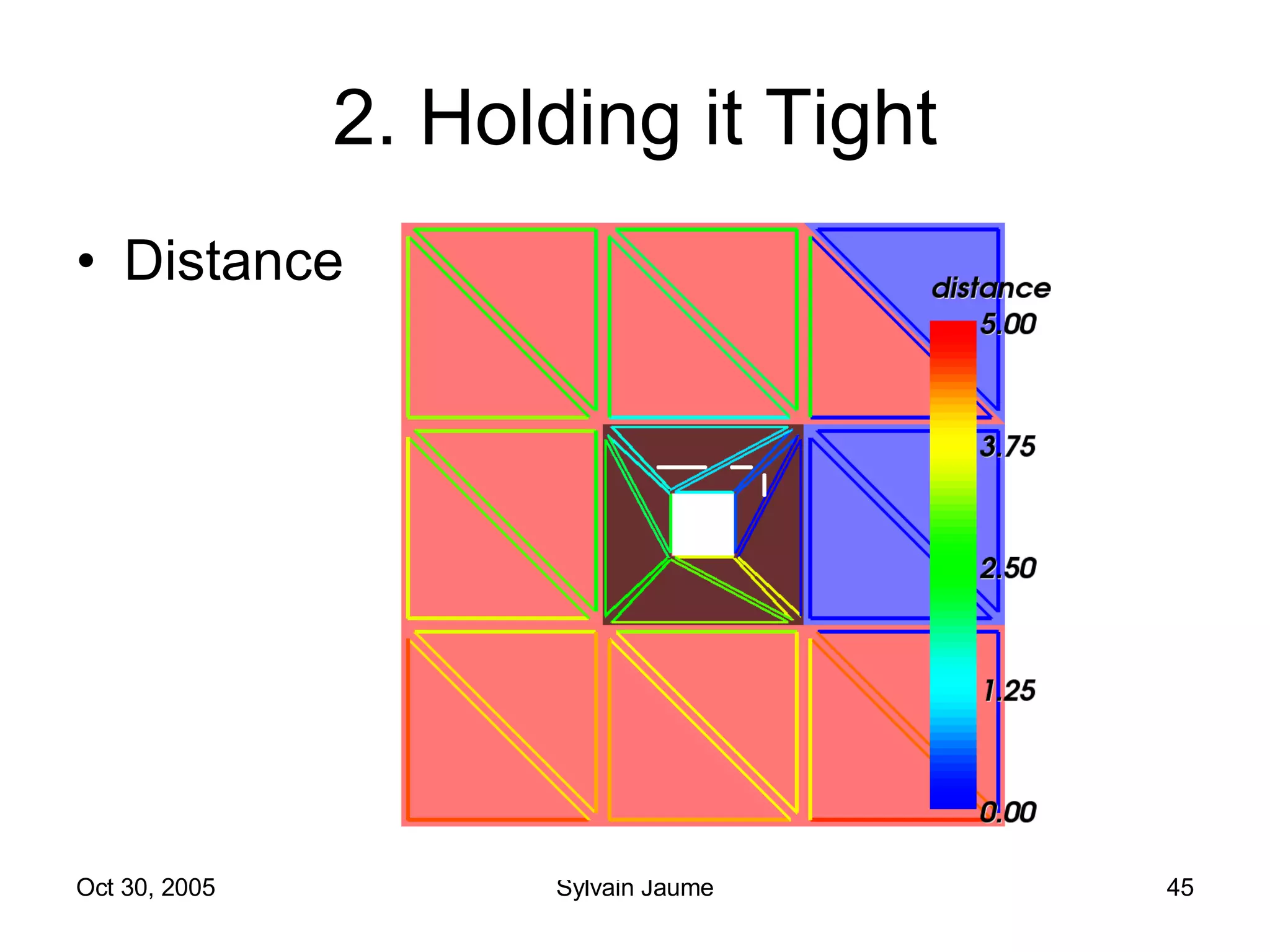
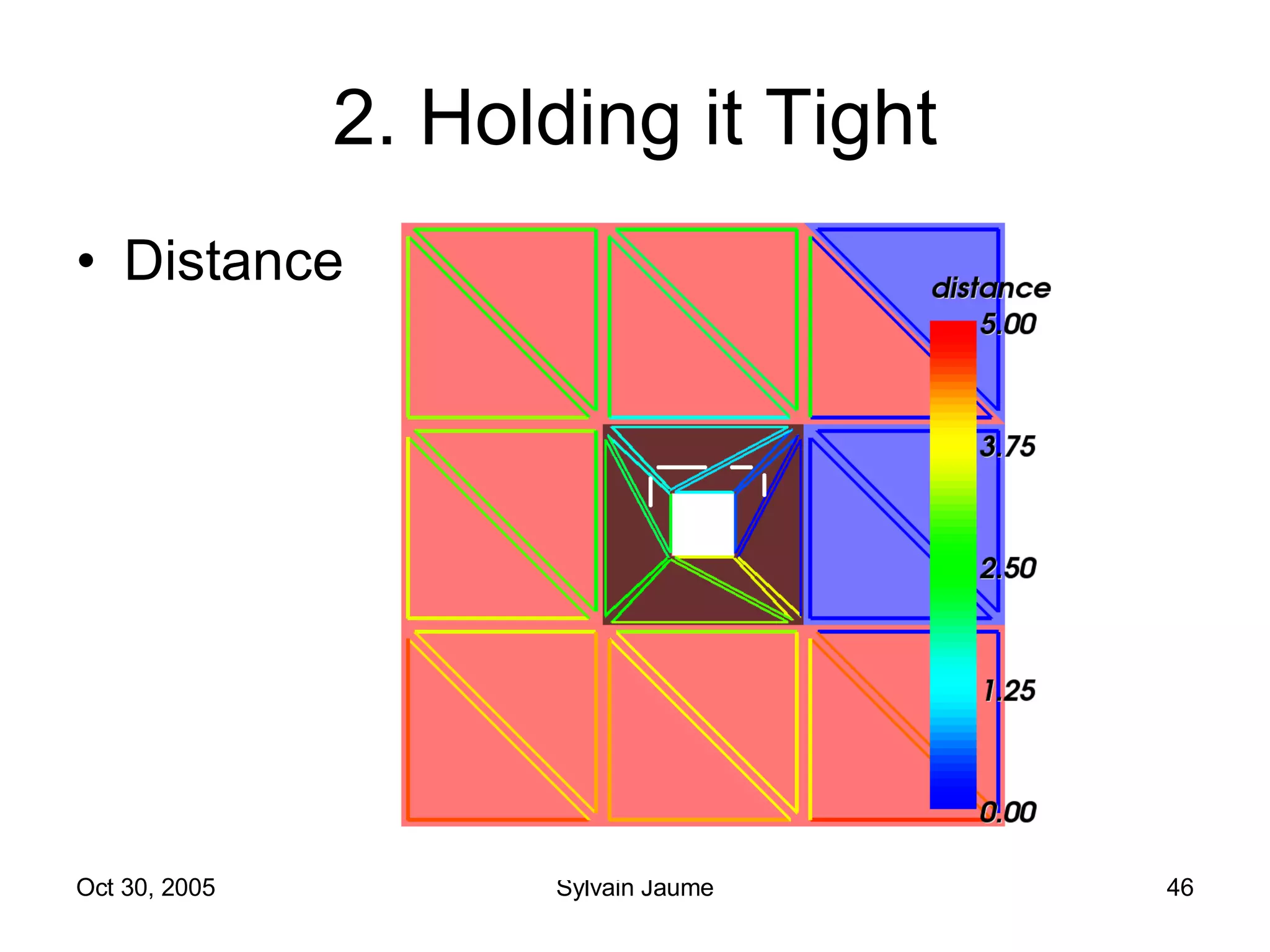
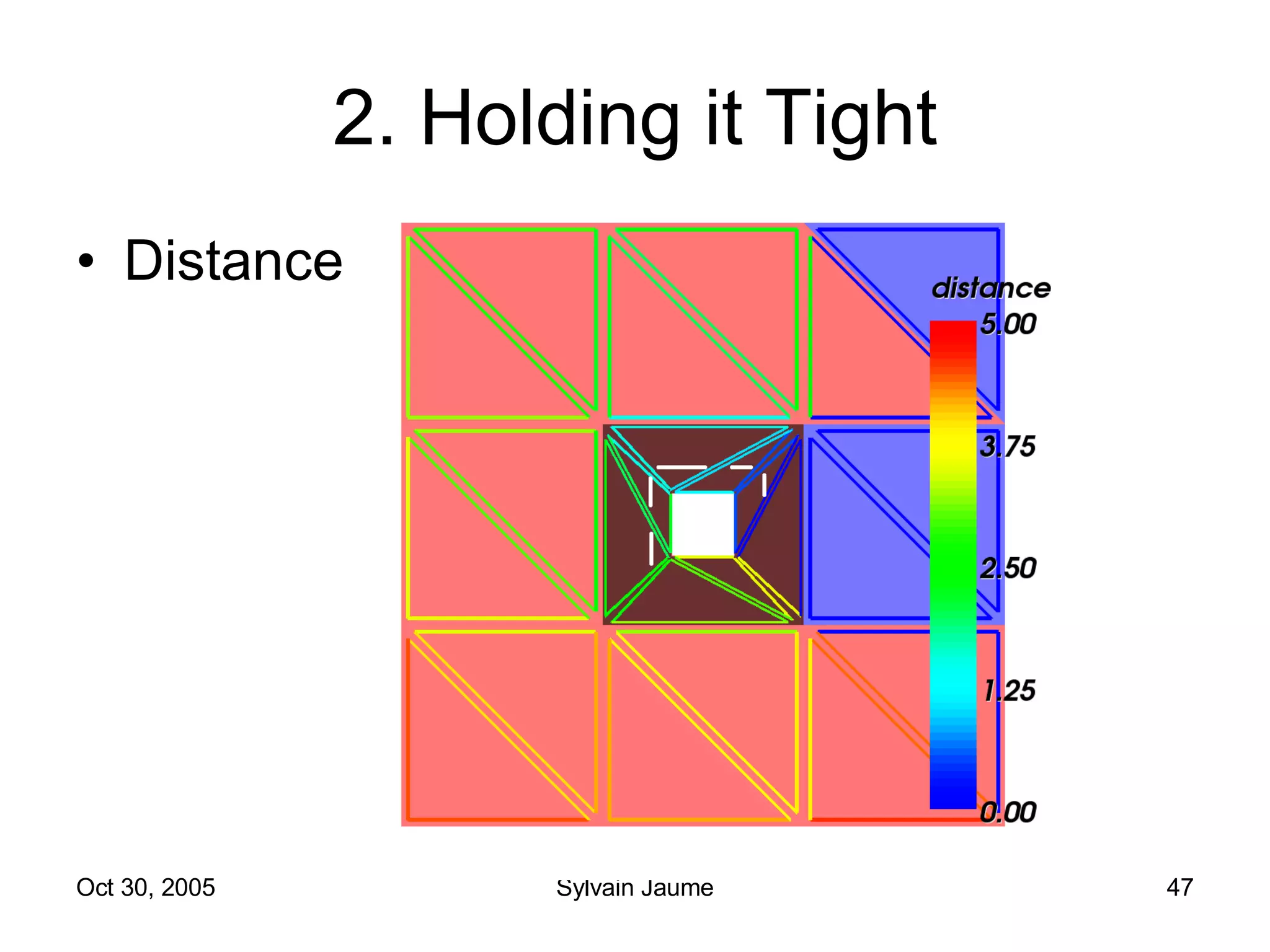
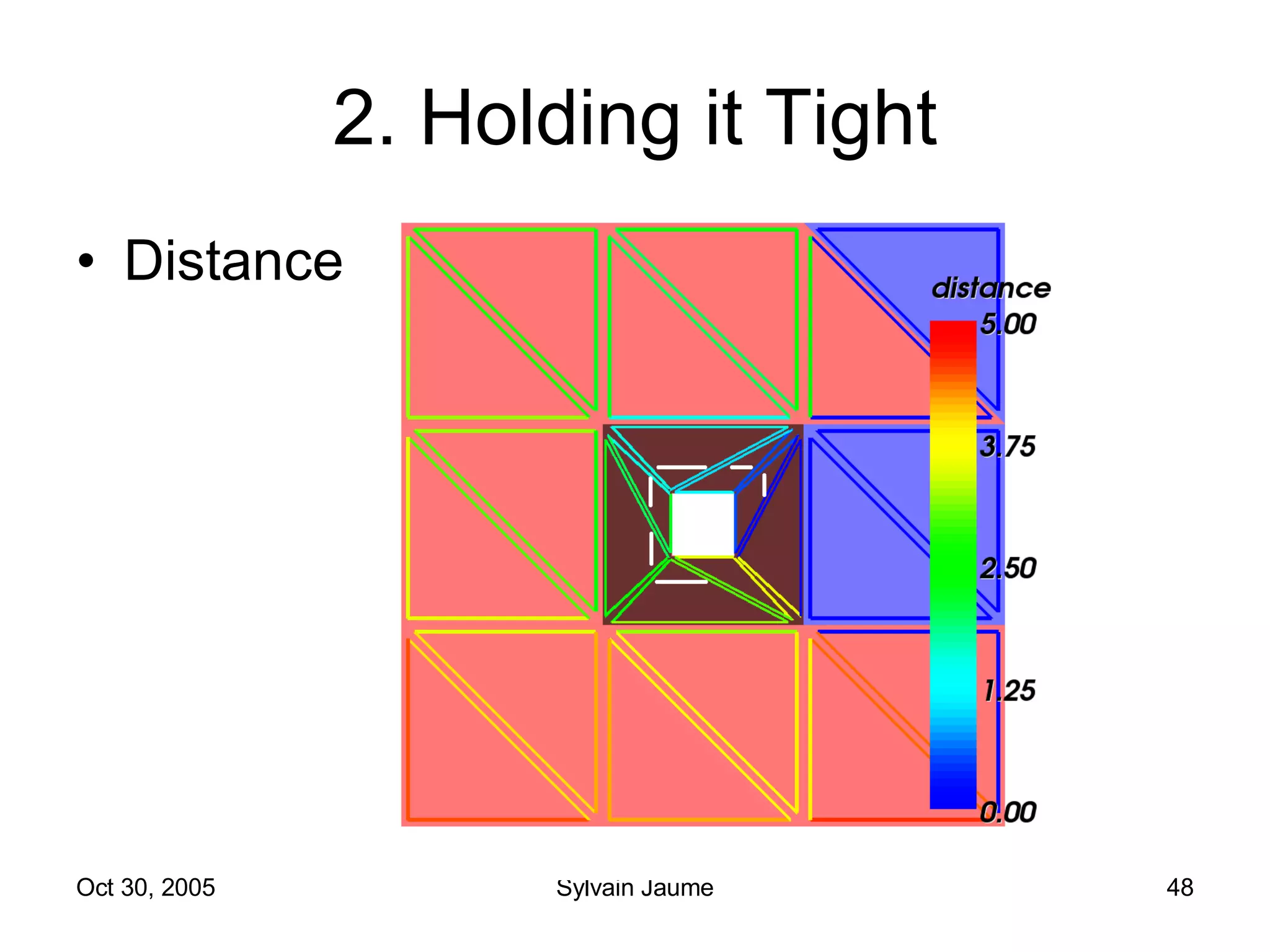
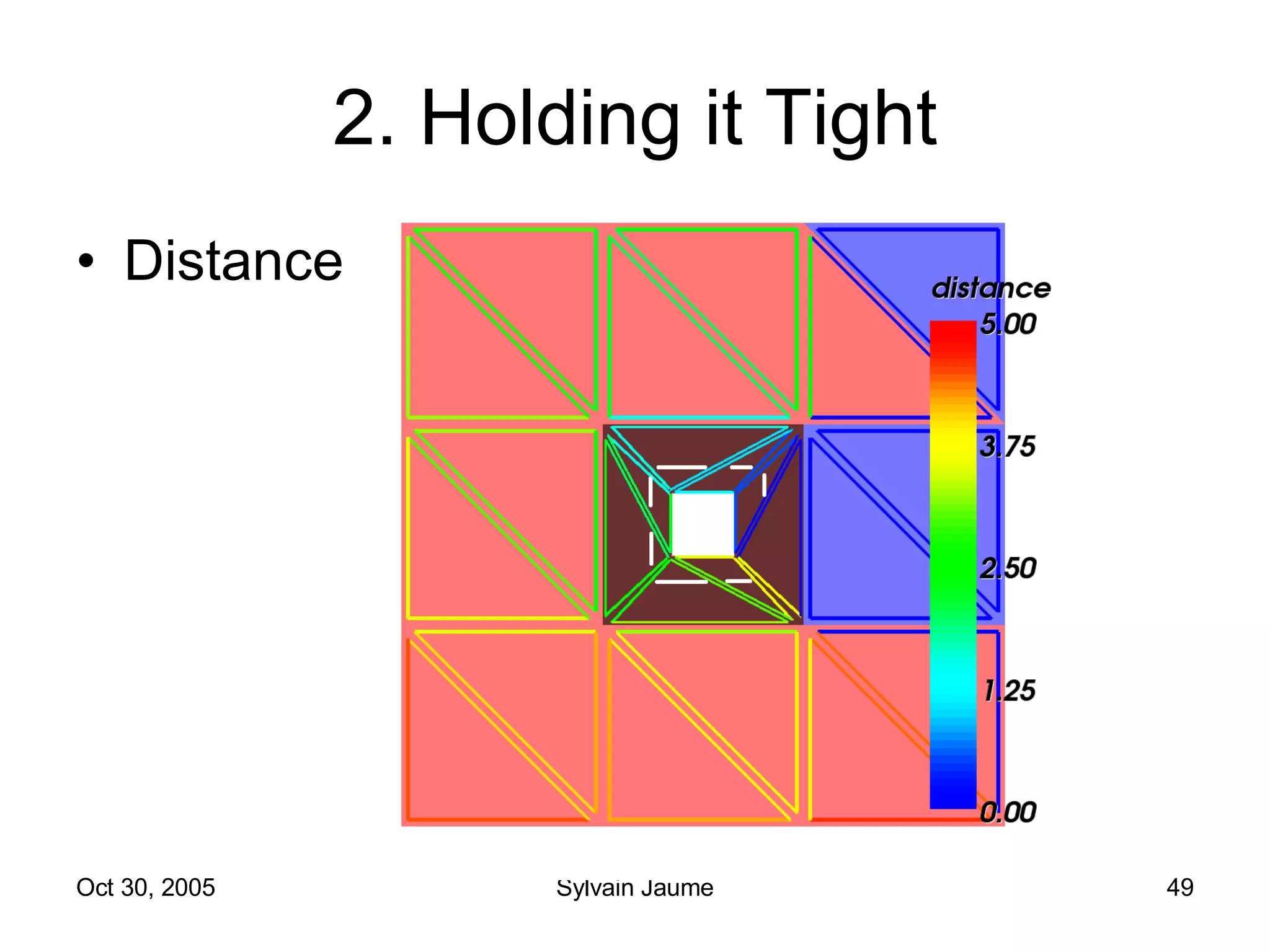
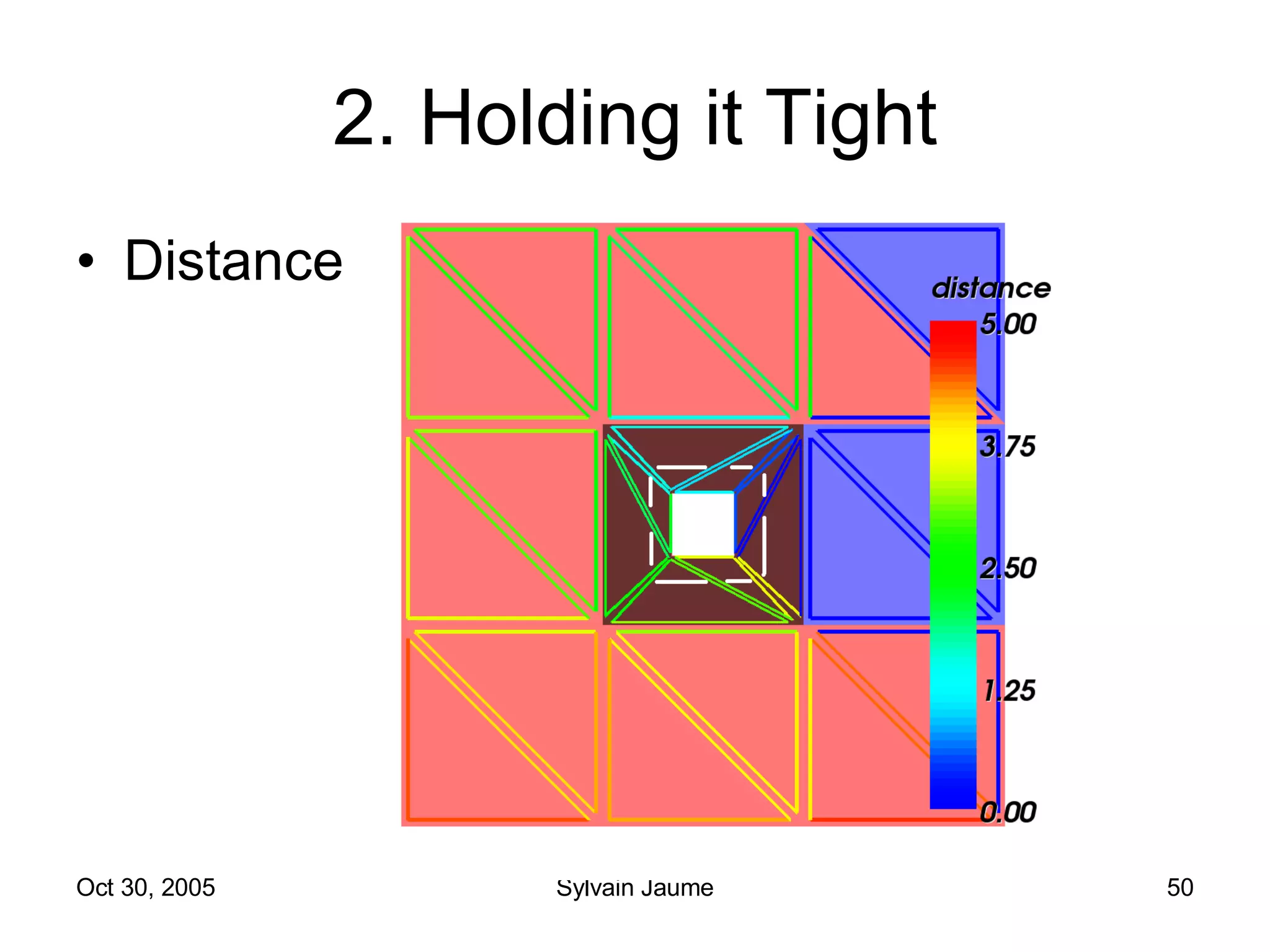
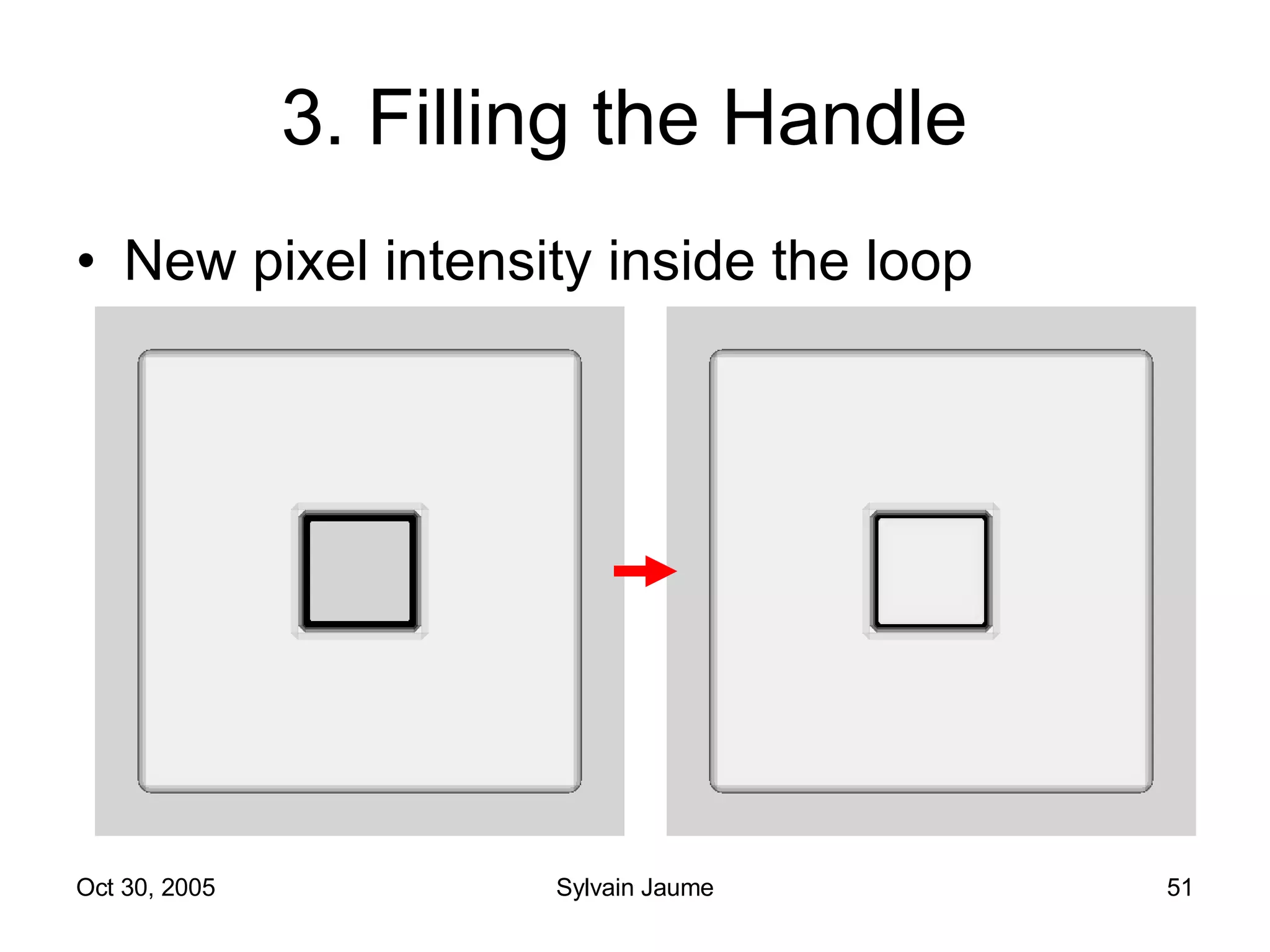
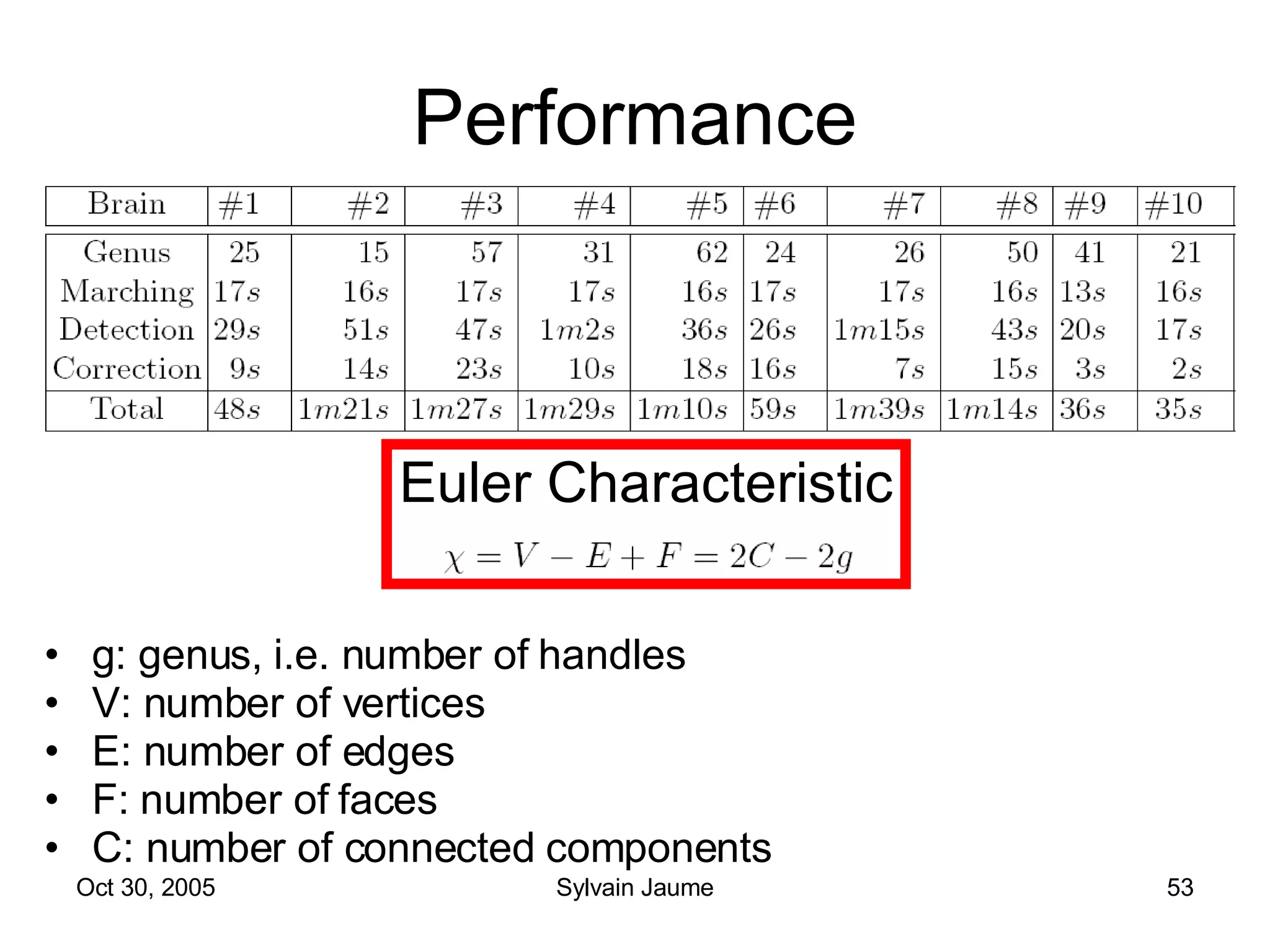
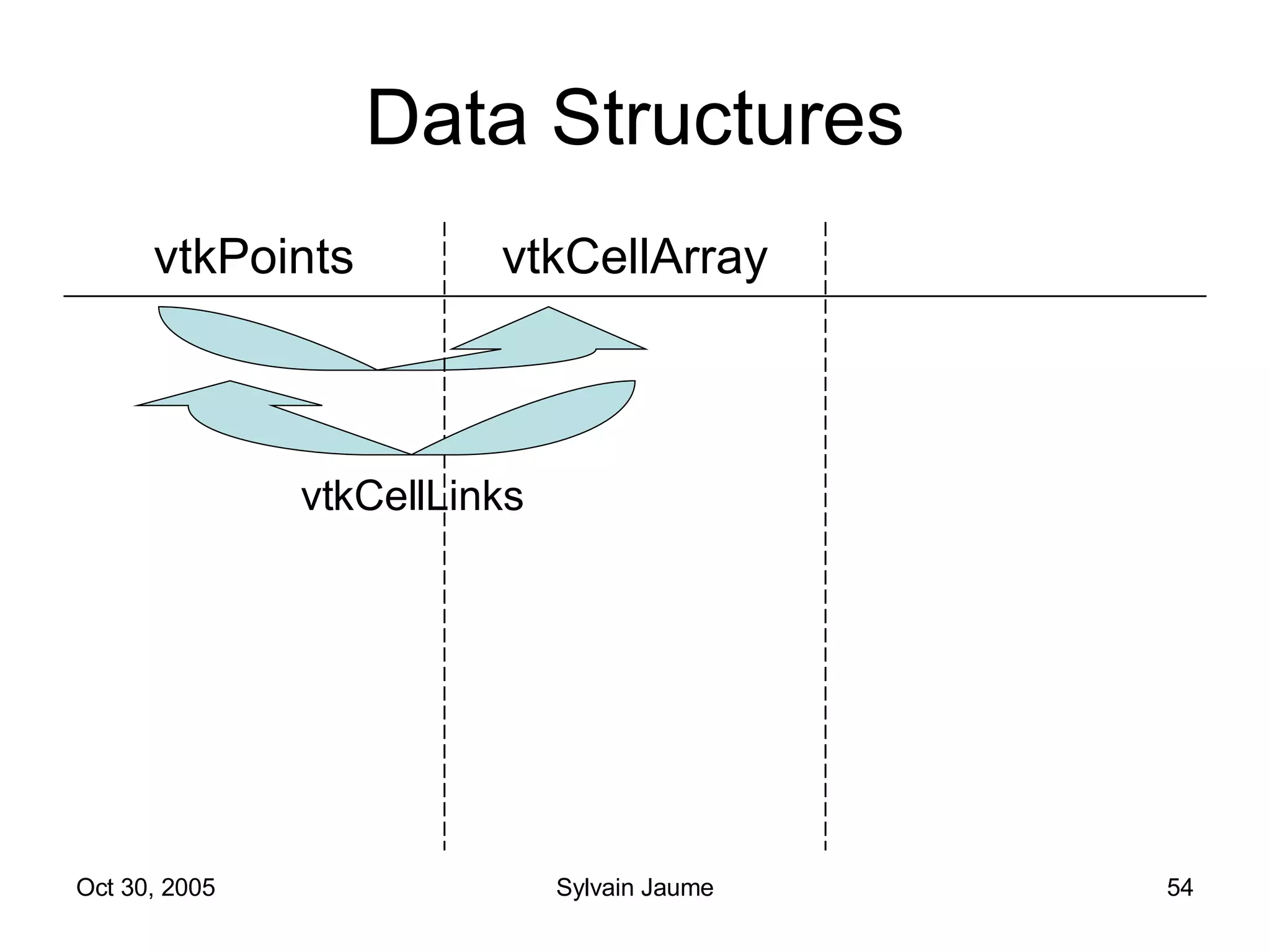

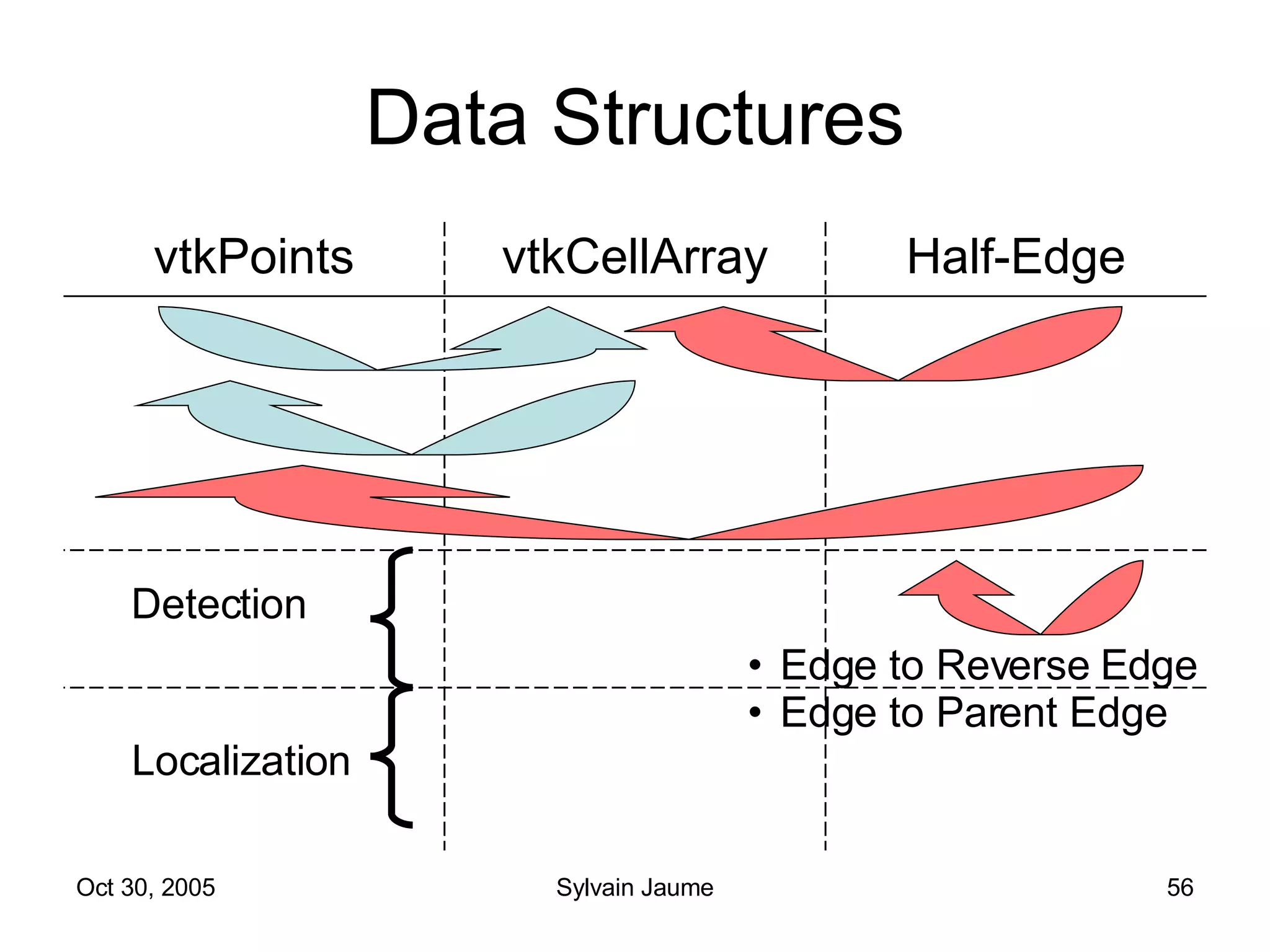
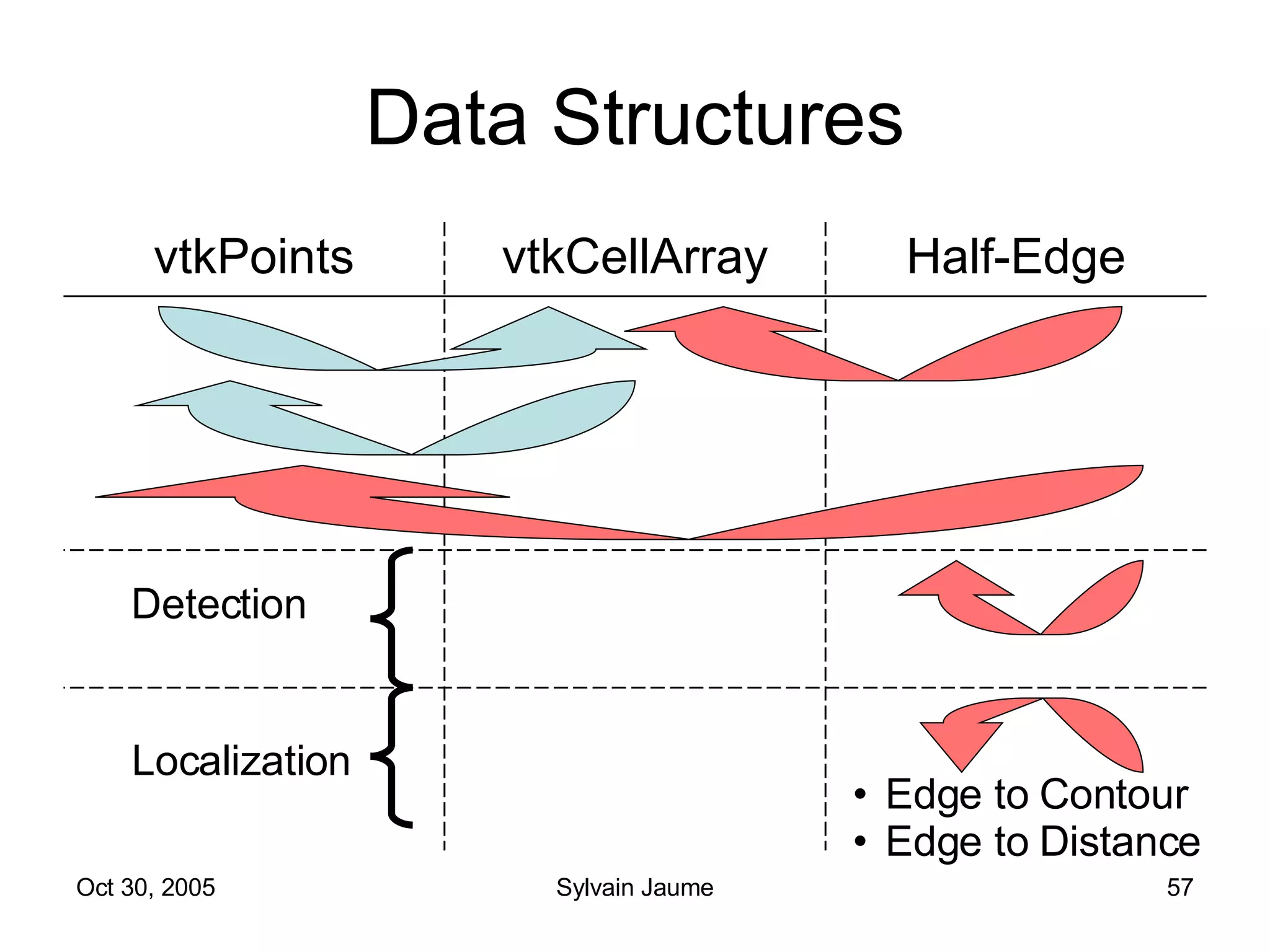
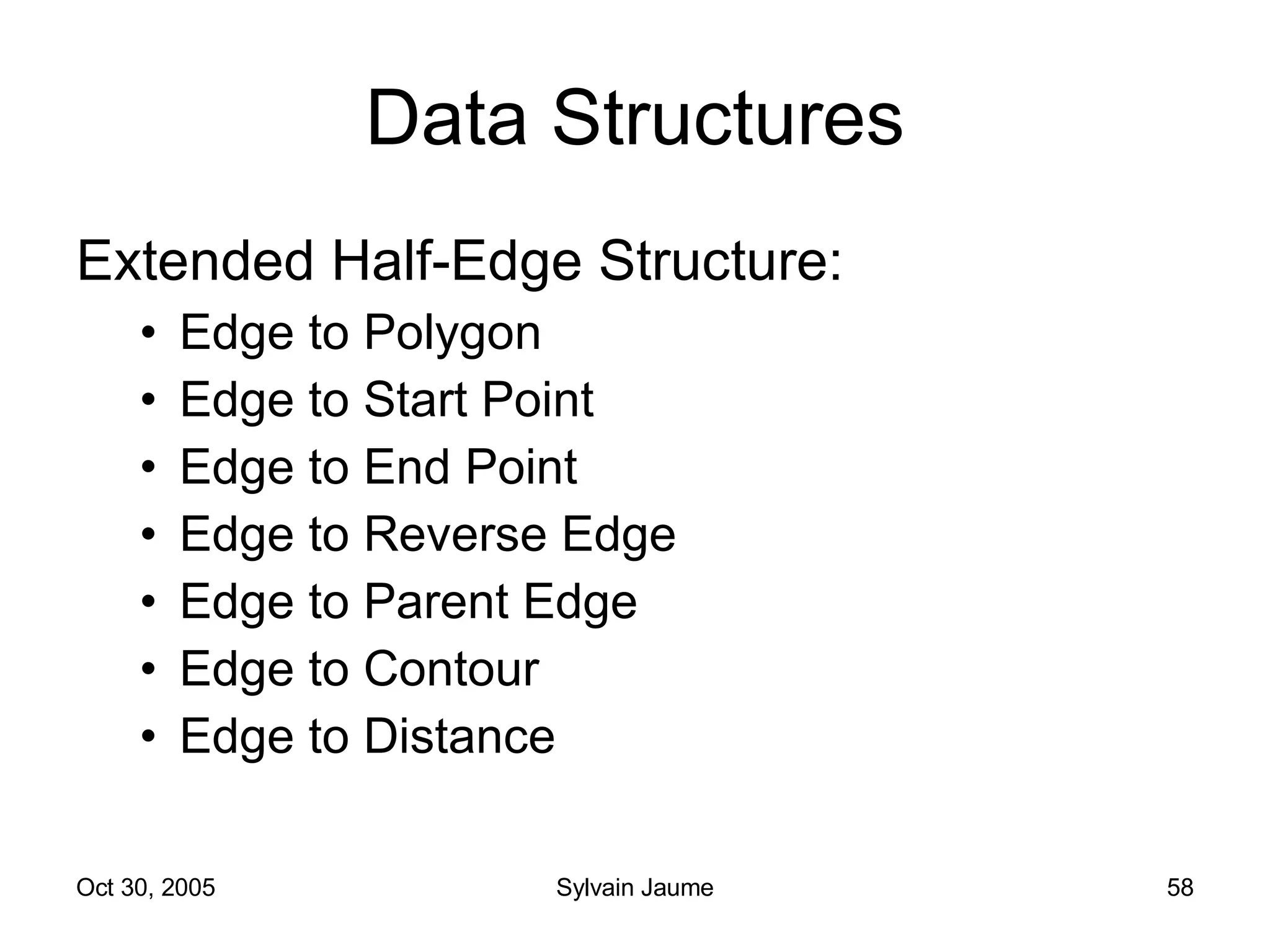
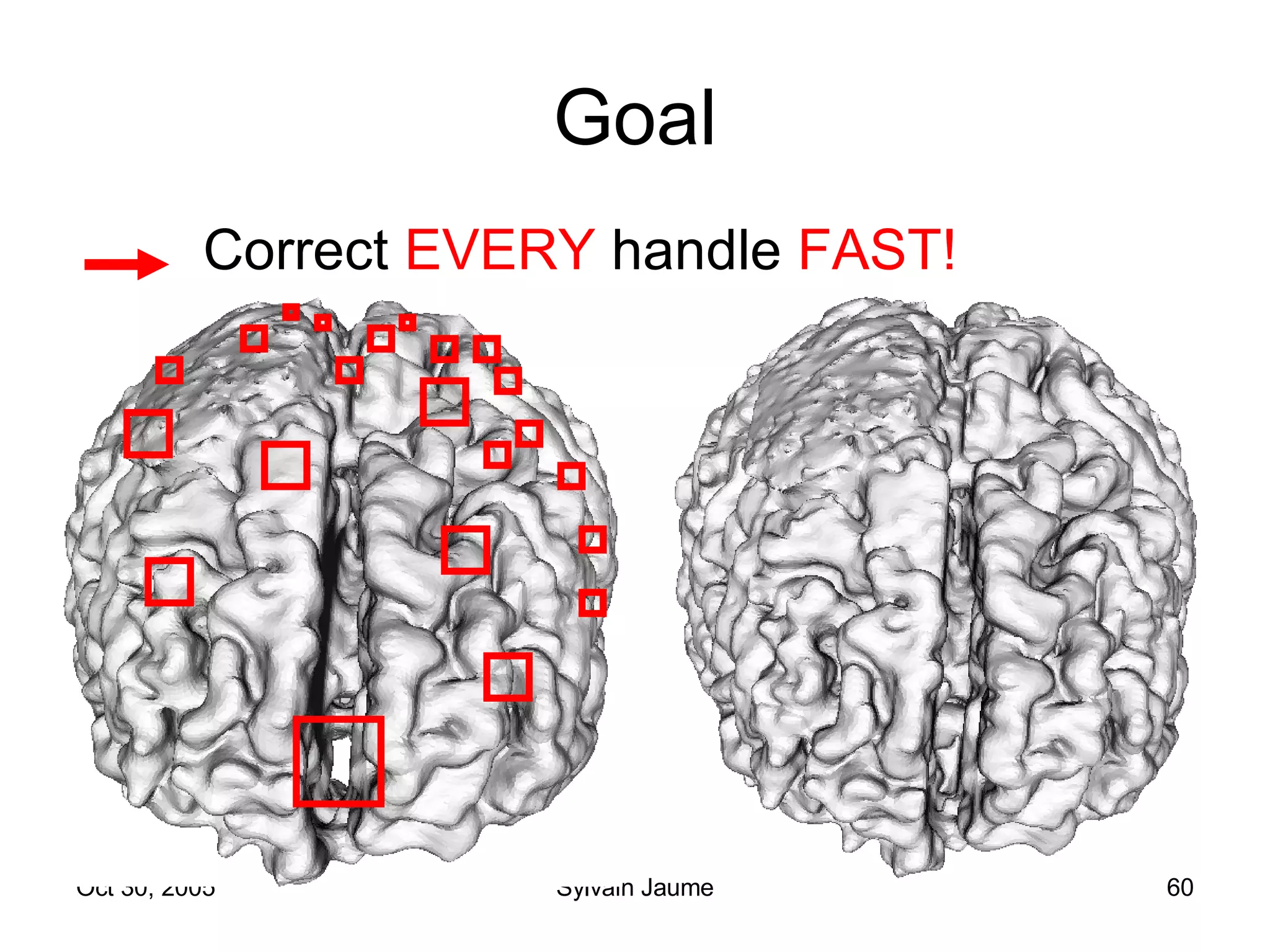
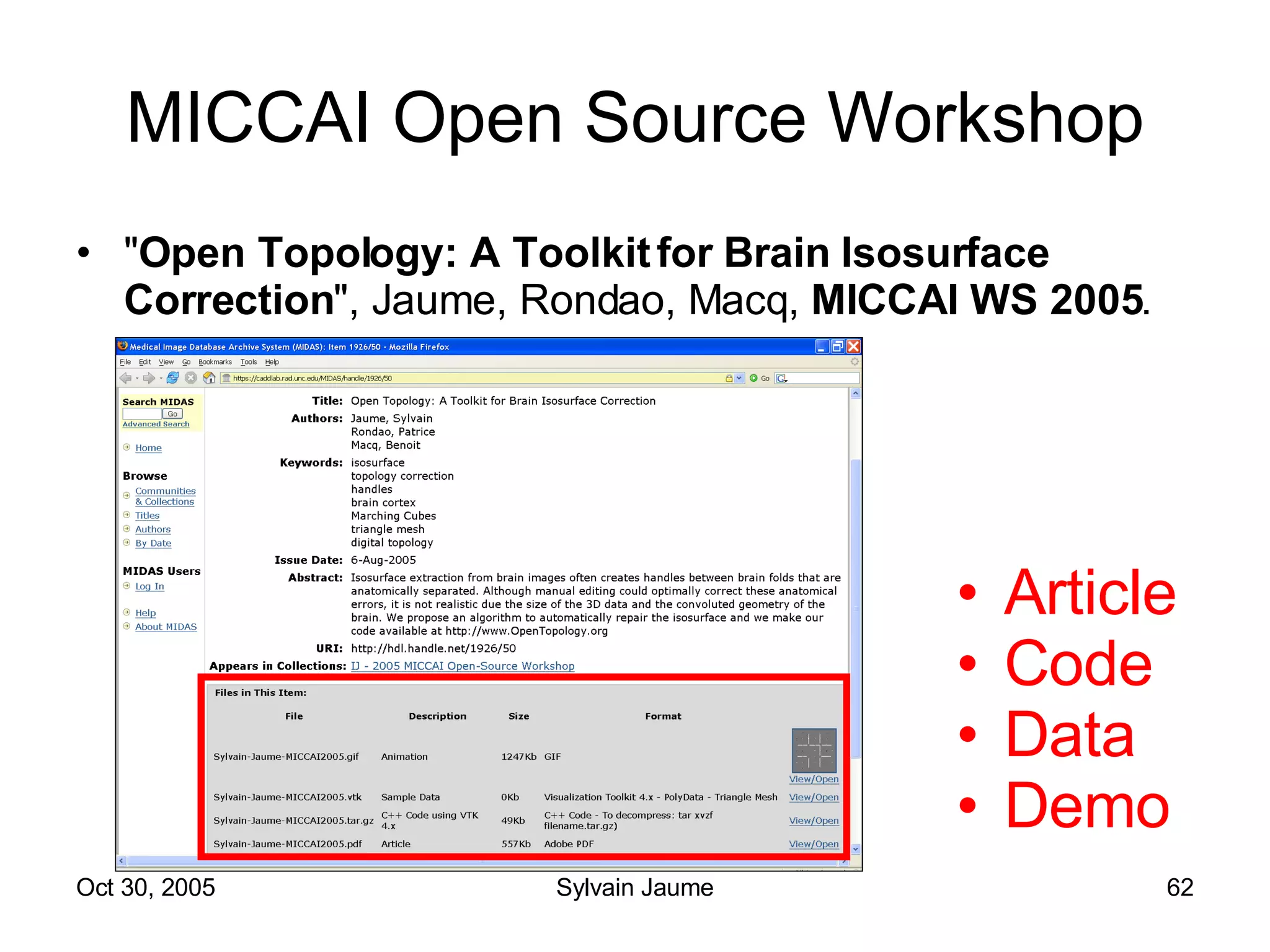
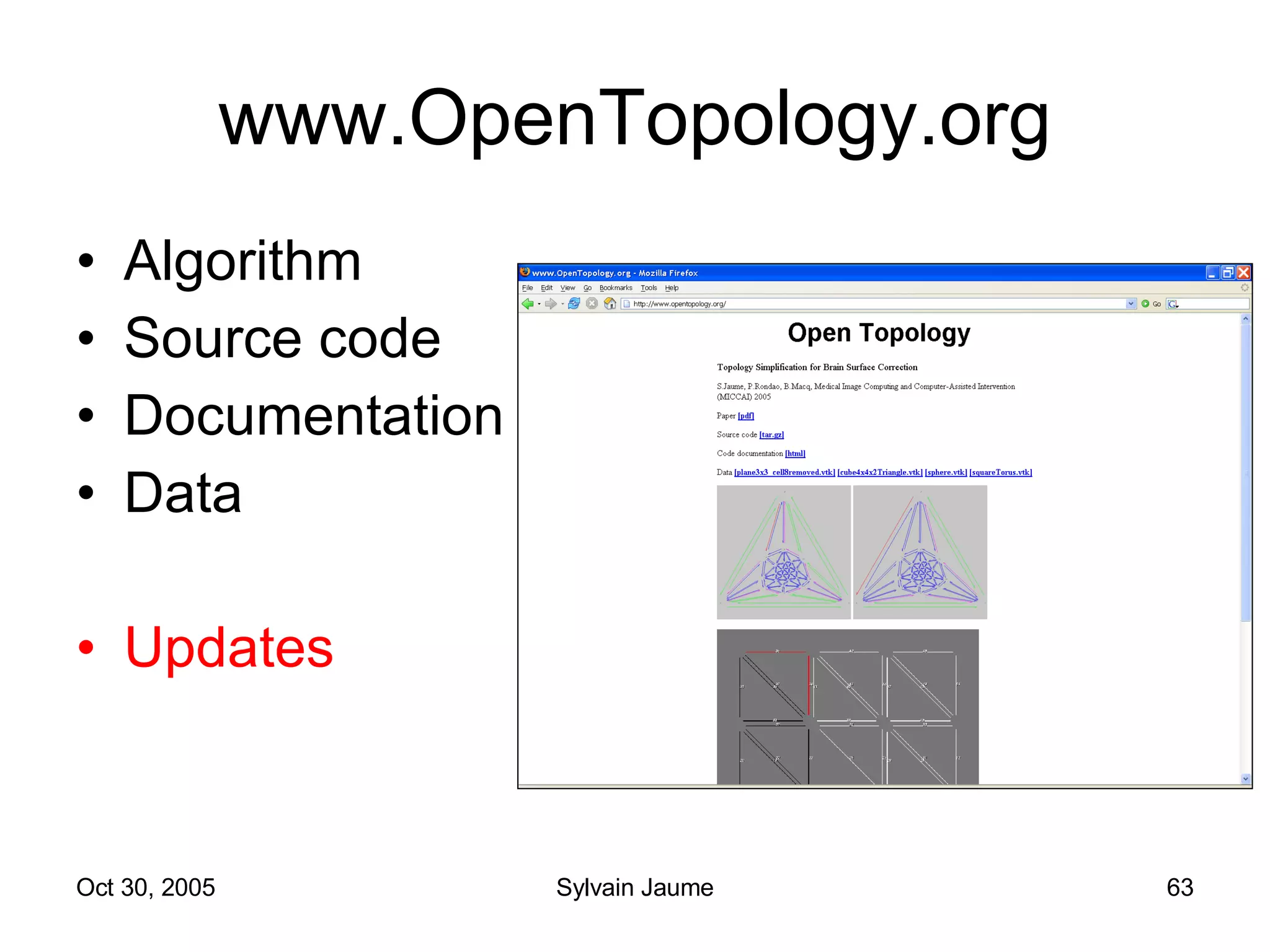

The document discusses Open Topology, a toolkit for correcting brain isosurface meshes extracted from MRI images. It describes how the toolkit uses a half-edge data structure and algorithms for handle detection, embracing handles, holding them tight, and filling handles to correct topological errors in the isosurfaces and generate watertight meshes. The toolkit aims to correctly handle all topological errors in brain isosurfaces rapidly and is open source.











































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)











![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)



