Downloaded 10 times







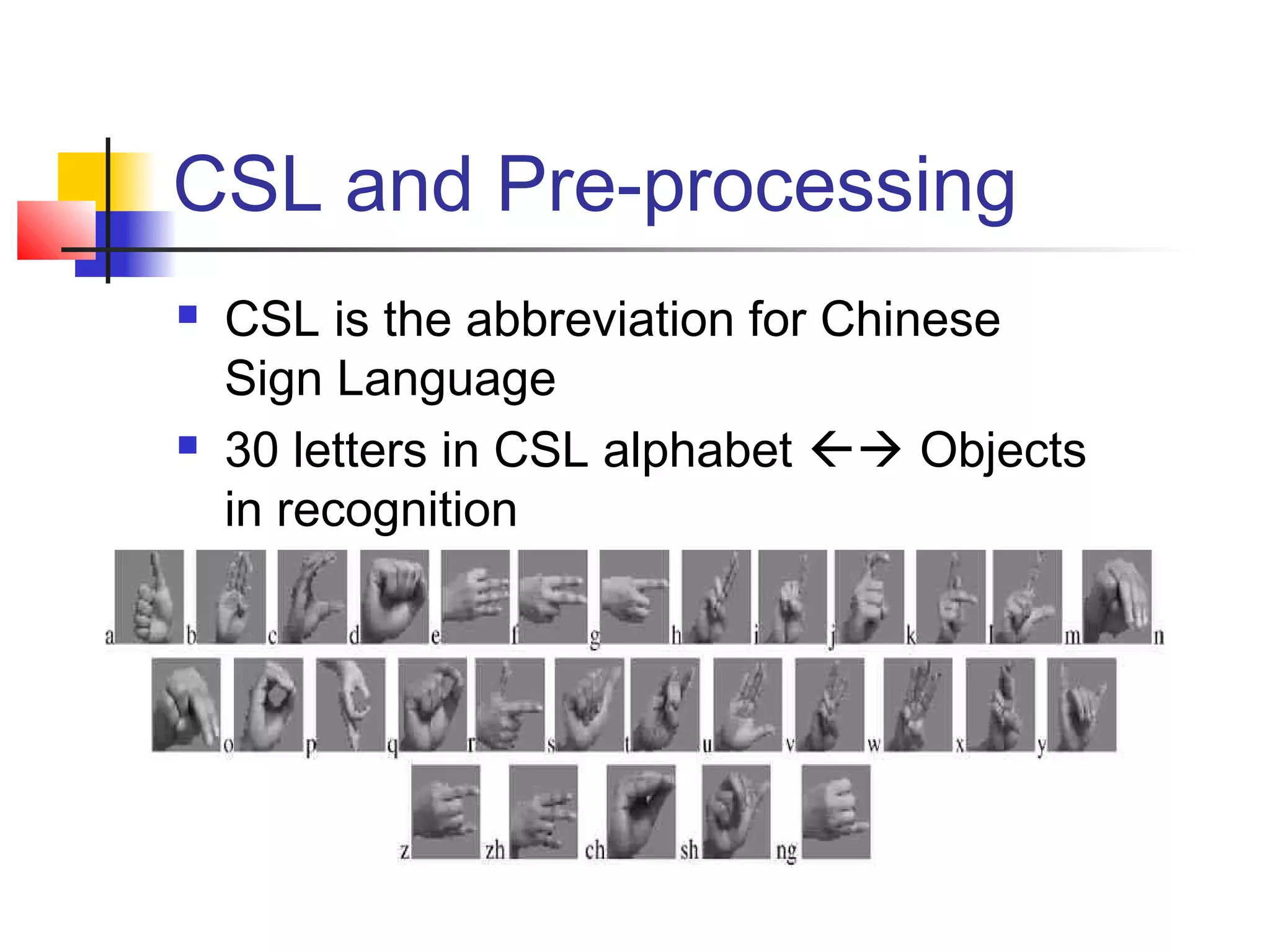









This document describes a hand gesture recognition system based on local linear embedding. It begins with an introduction explaining the need for more natural human-computer interfaces and overviewing common vision-based and glove-based methods. It then describes the specific Chinese sign language alphabet used as objects for recognition. Next, it details the preprocessing steps of detecting skin regions and isolating hand gesture regions from video input. It introduces local linear embedding for dimensionality reduction before recognizing gestures. Experimental results showed over 90% recognition rates on training and testing datasets. The system provides robust, real-time hand gesture recognition capabilities.