This document provides an overview of several advanced navigation systems:
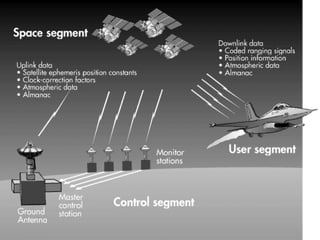
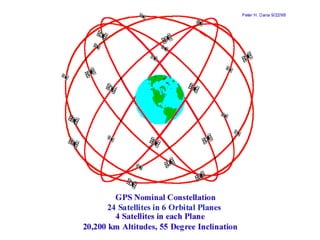
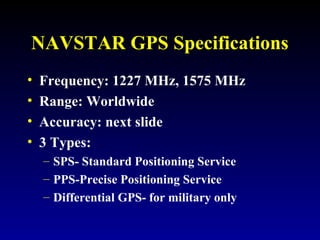
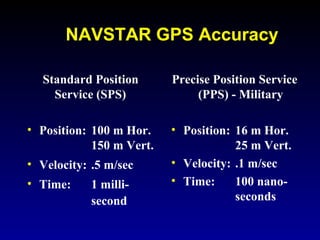
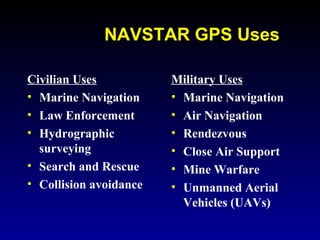
- The NAVSTAR GPS system uses satellites to provide extremely accurate global positioning with errors less than 100 meters. Differential GPS can further improve accuracy to 2-5 meters.
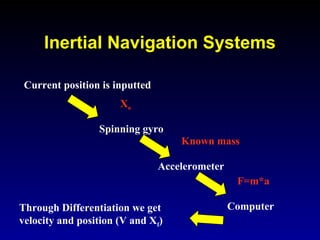
- Ship's inertial navigation systems (SINS) use gyroscopes and accelerometers to continuously calculate position via known accelerations, but require periodic resets. Newer electrostatic systems can operate for 30 days without reset.
- Bottom contour navigation relies on echo sounding to determine position based on comparisons to ocean floor contour charts.
- LORAN is a ground-based hyperbolic navigation system using time differences between signal transmissions, providing accuracy within 200-500 yards.