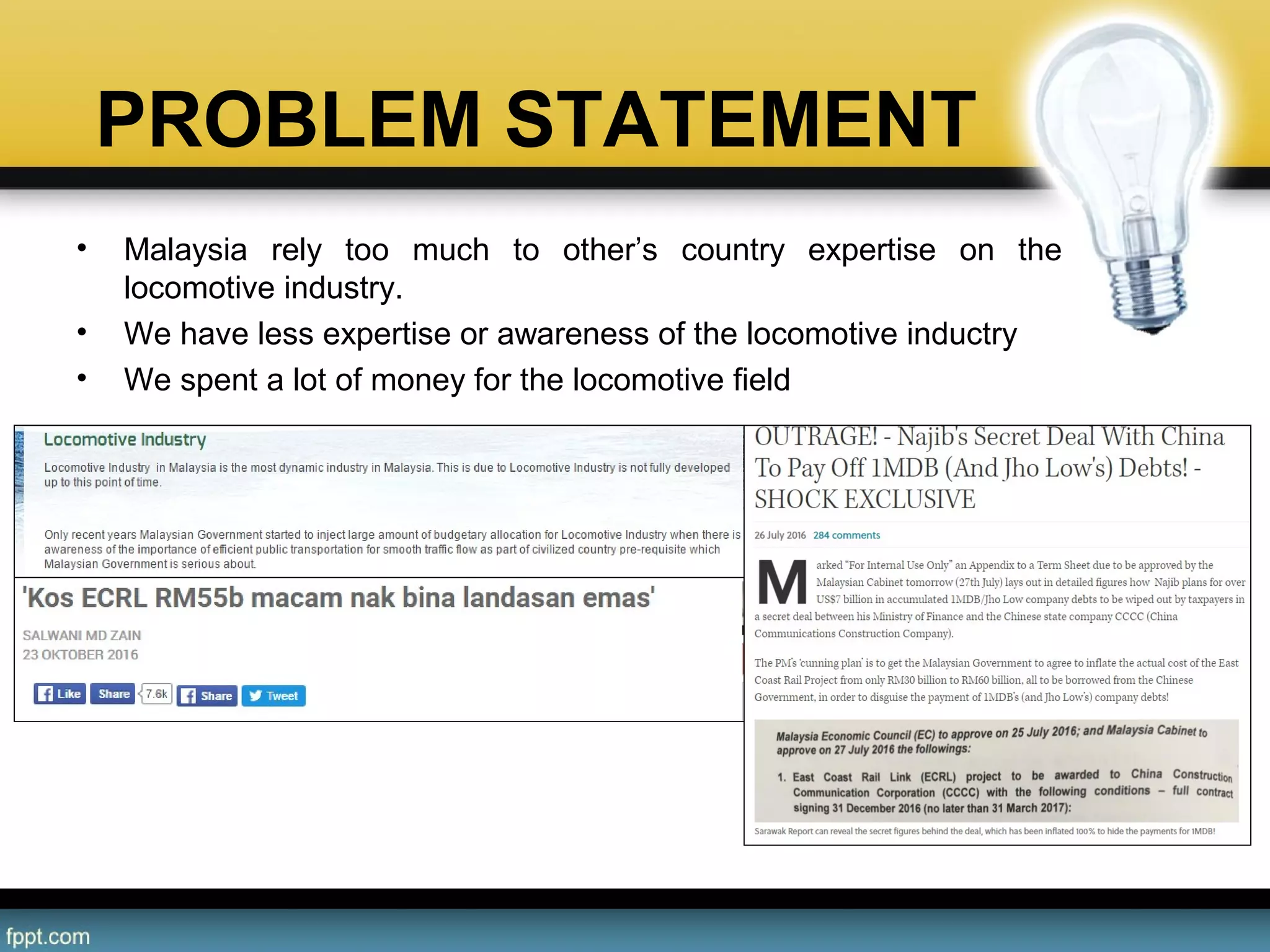
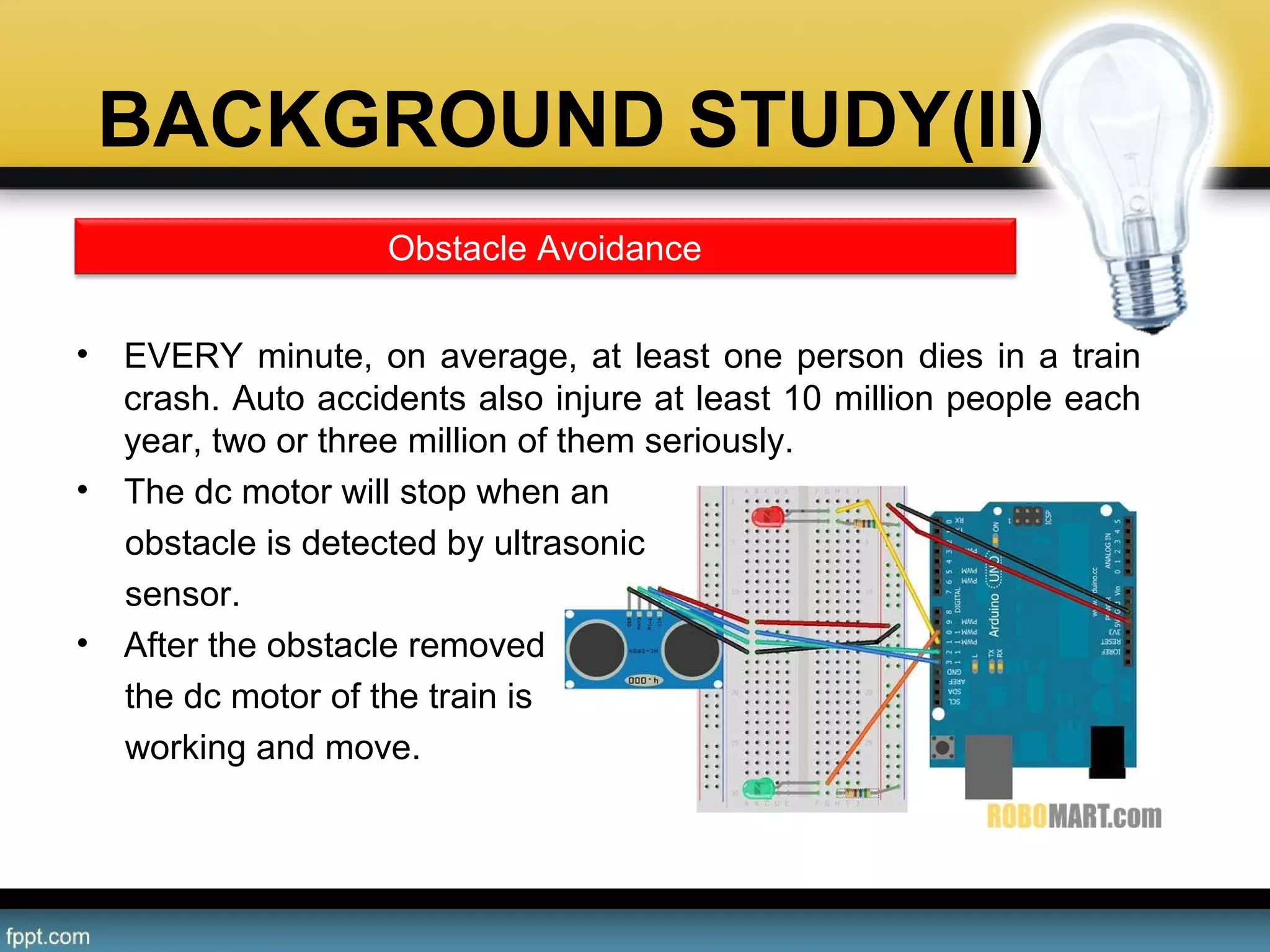
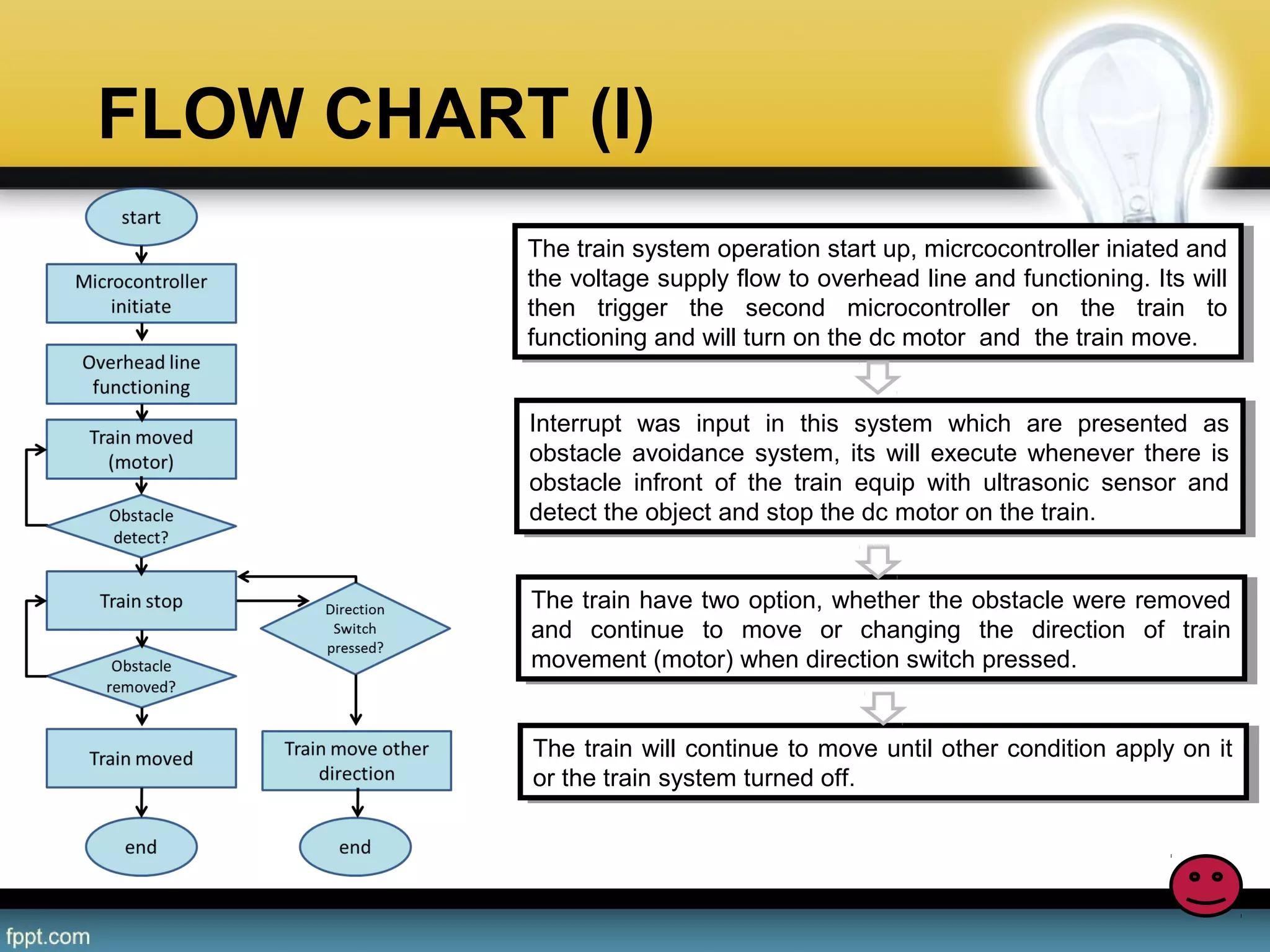
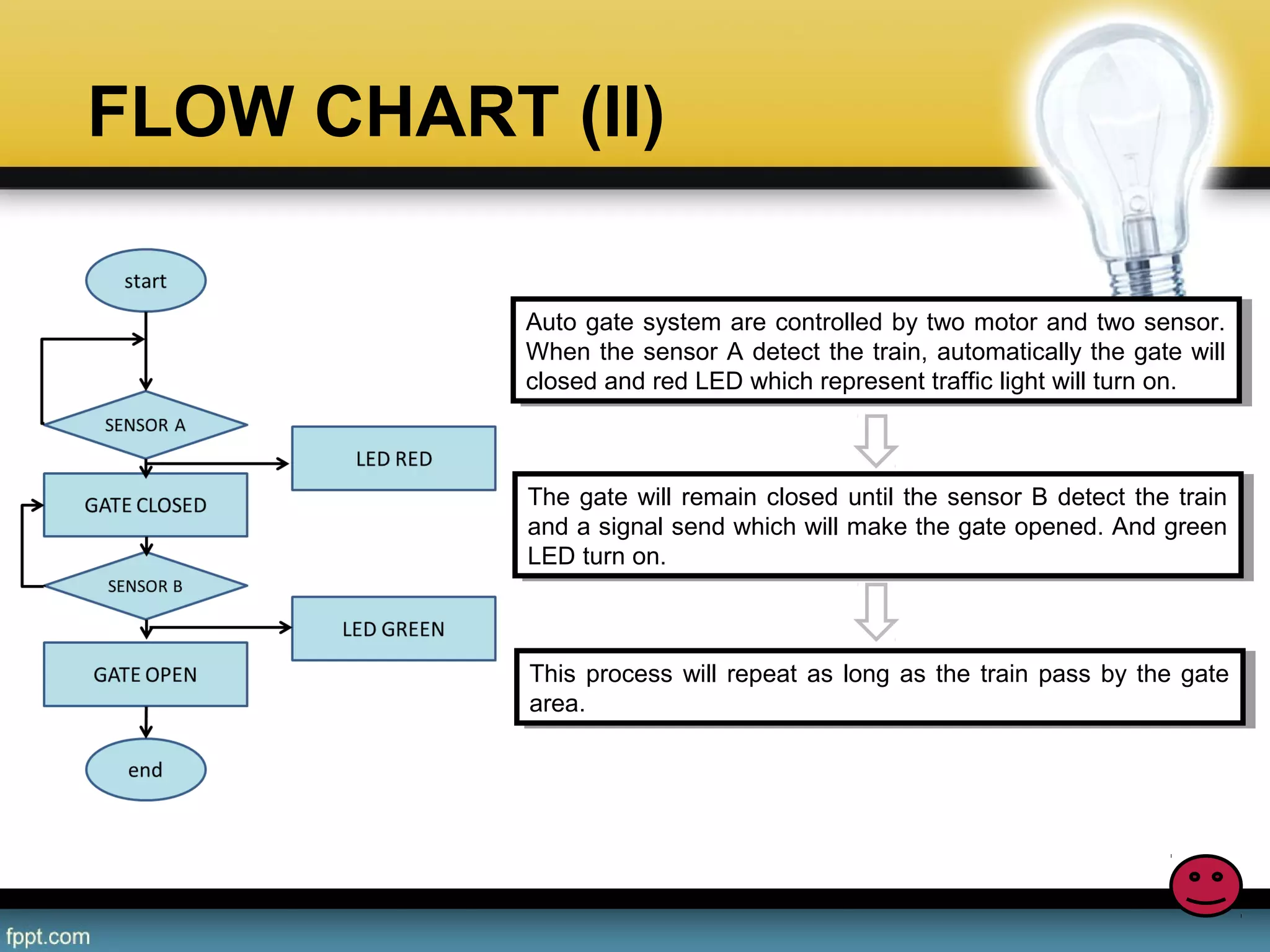
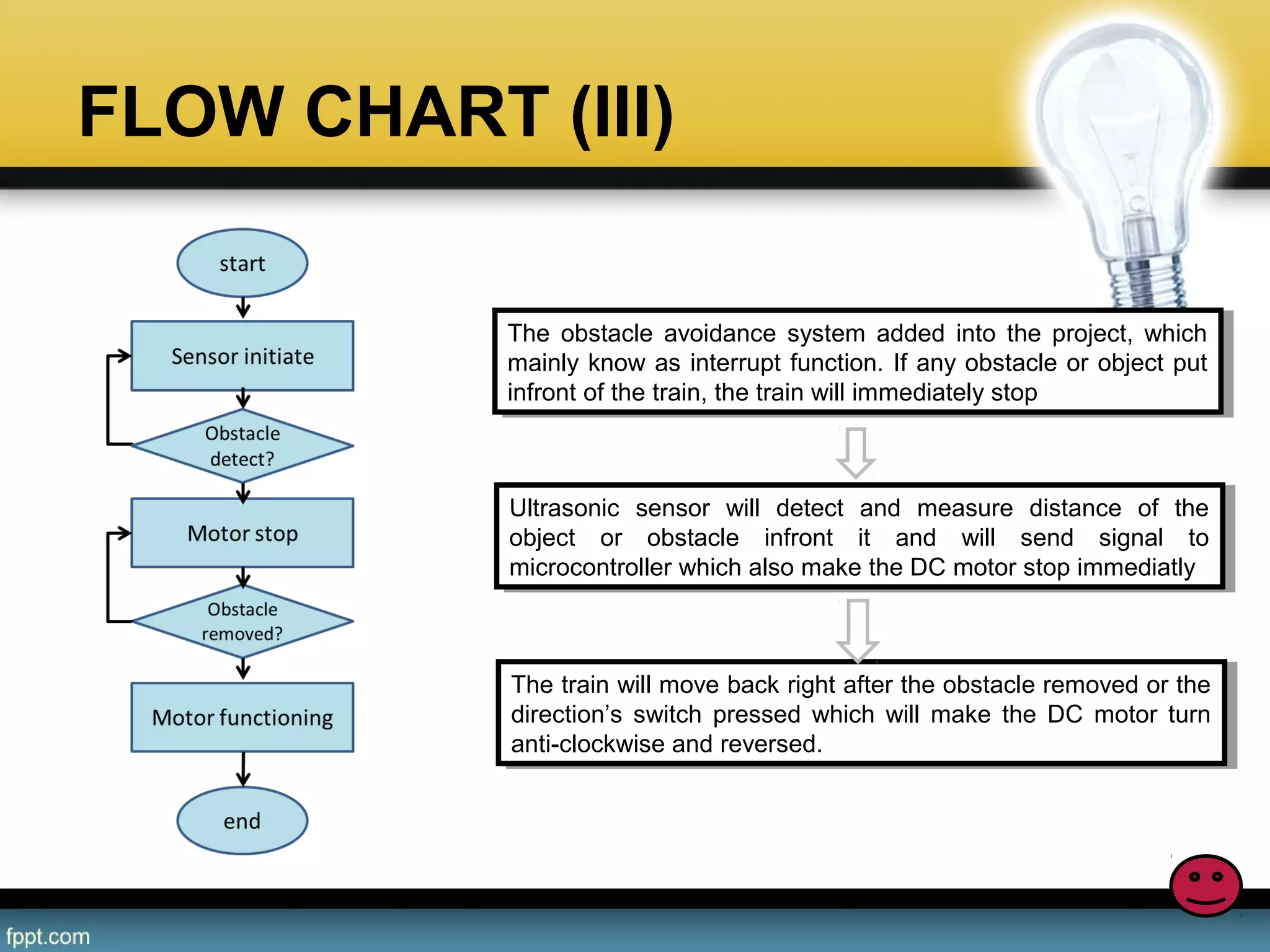
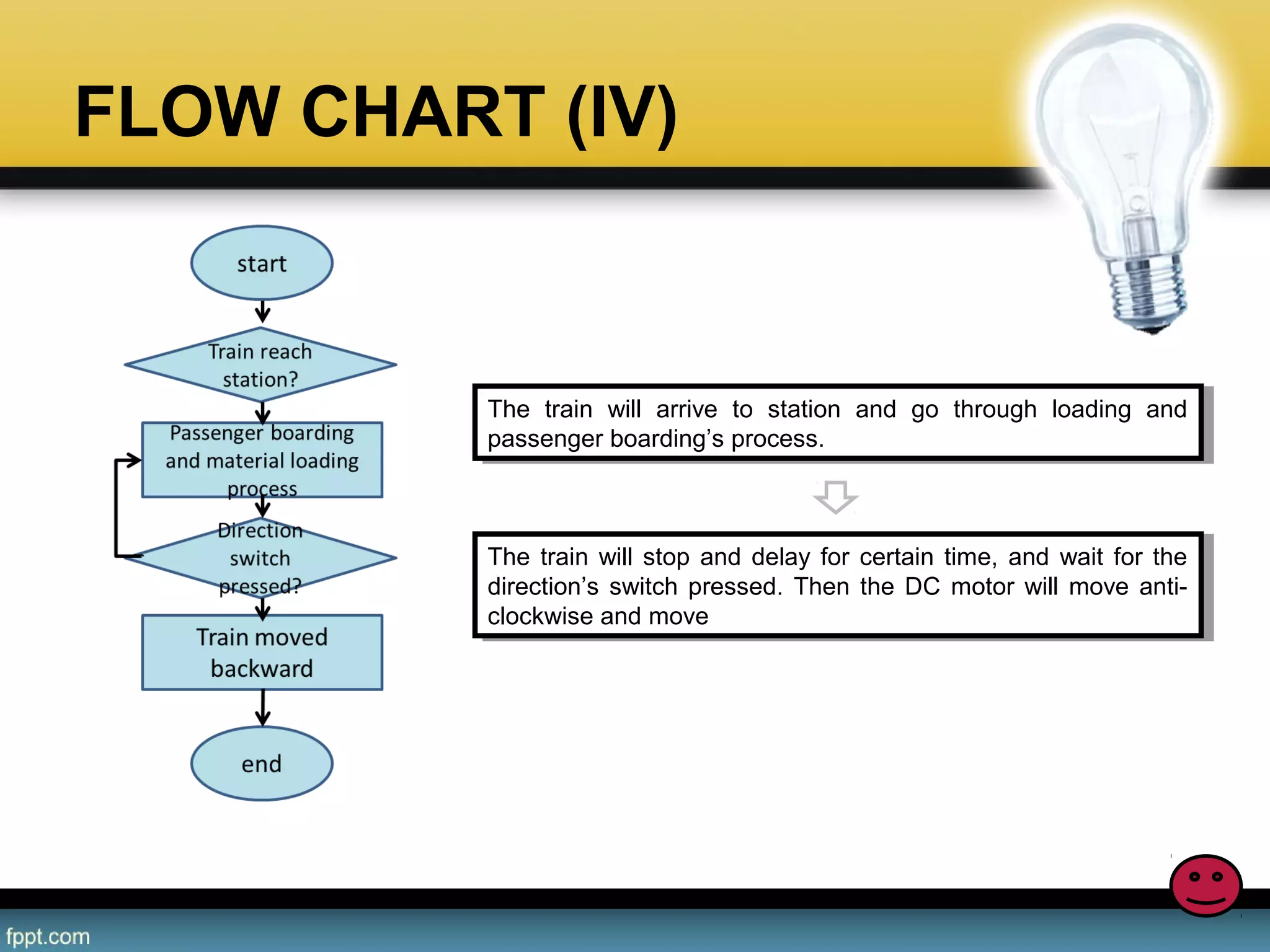
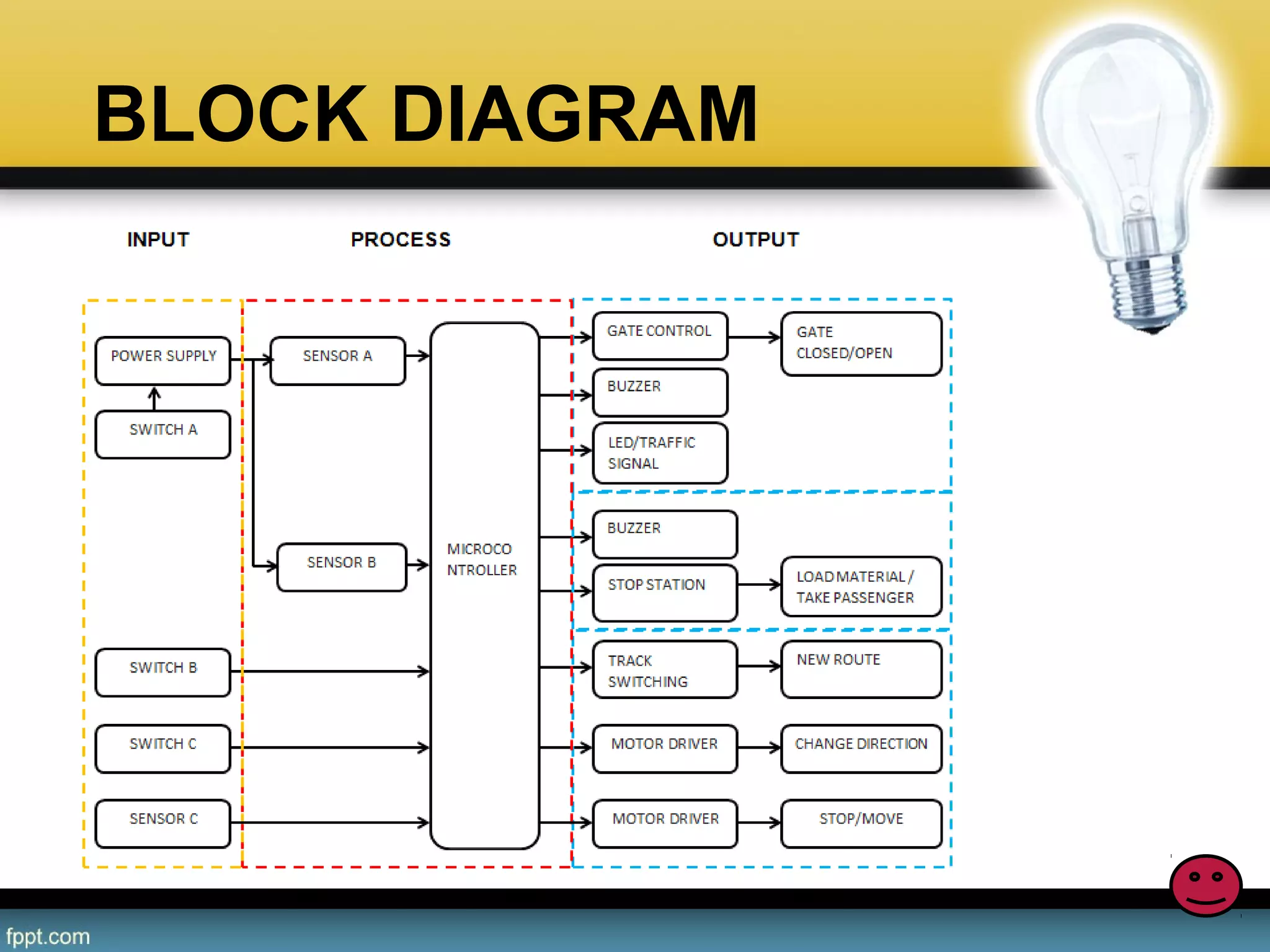
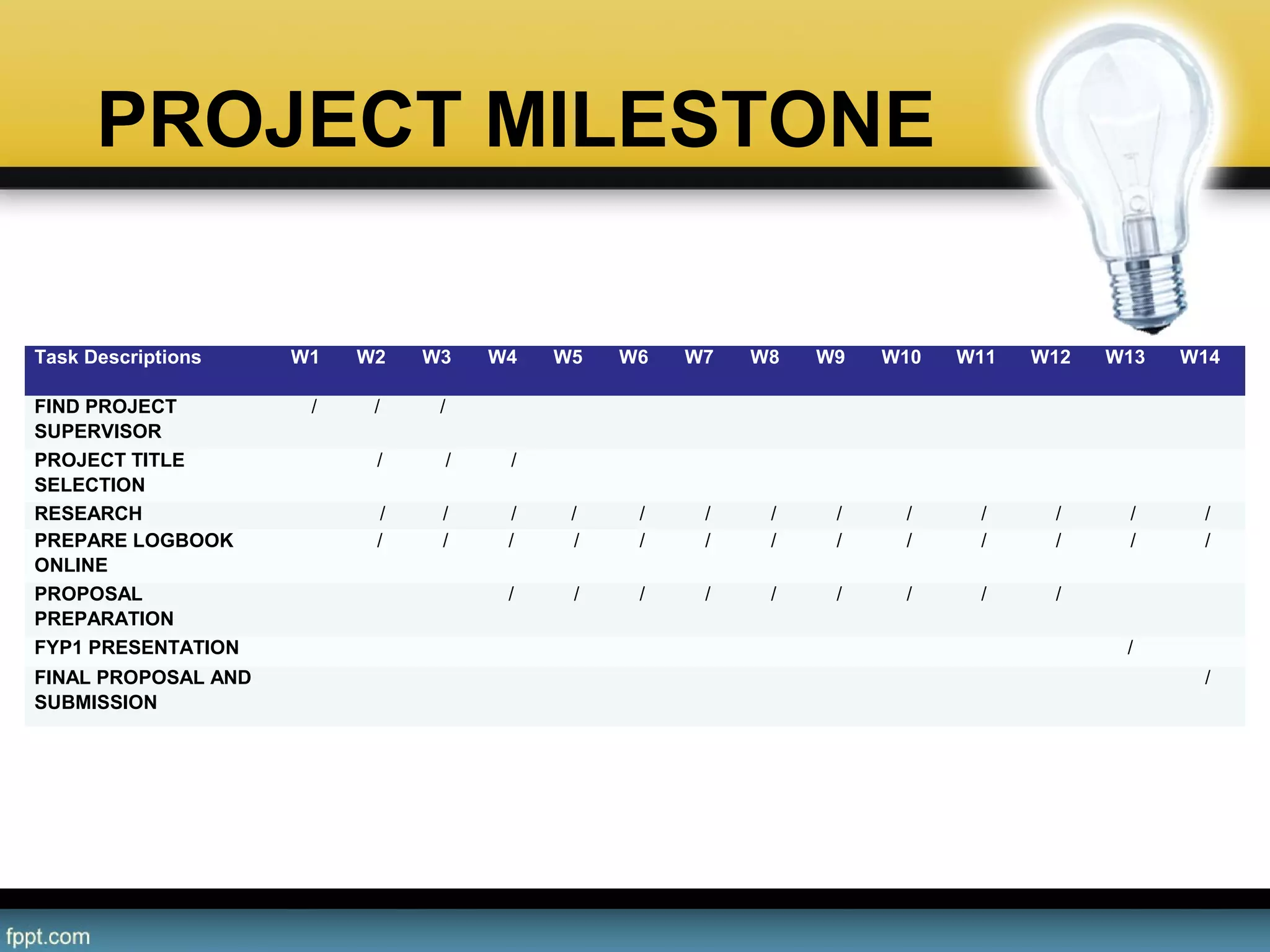
This document describes a student's final year project to develop an electric train system using a microcontroller. The project aims to learn about train traction systems, gate control systems, passenger loading processes, and obstacle avoidance operations. The train will move along the track and stop at stations for loading. It will detect obstacles using ultrasonic sensors and gates using IR sensors. When developed, the system will help address Malaysia's lack of expertise in locomotive industries.