This document discusses multi-objective optimization and Pareto multi-objective optimization. It provides examples of multi-objective optimization problems with two or more competing objectives that must be optimized simultaneously. The key concepts covered include Pareto optimal solutions, which define the best trade-offs between objectives and are non-dominated by other solutions. Methods for solving multi-objective optimization problems include traditional approaches that aggregate objectives and Pareto techniques using genetic algorithms and multi-objective evolutionary algorithms.
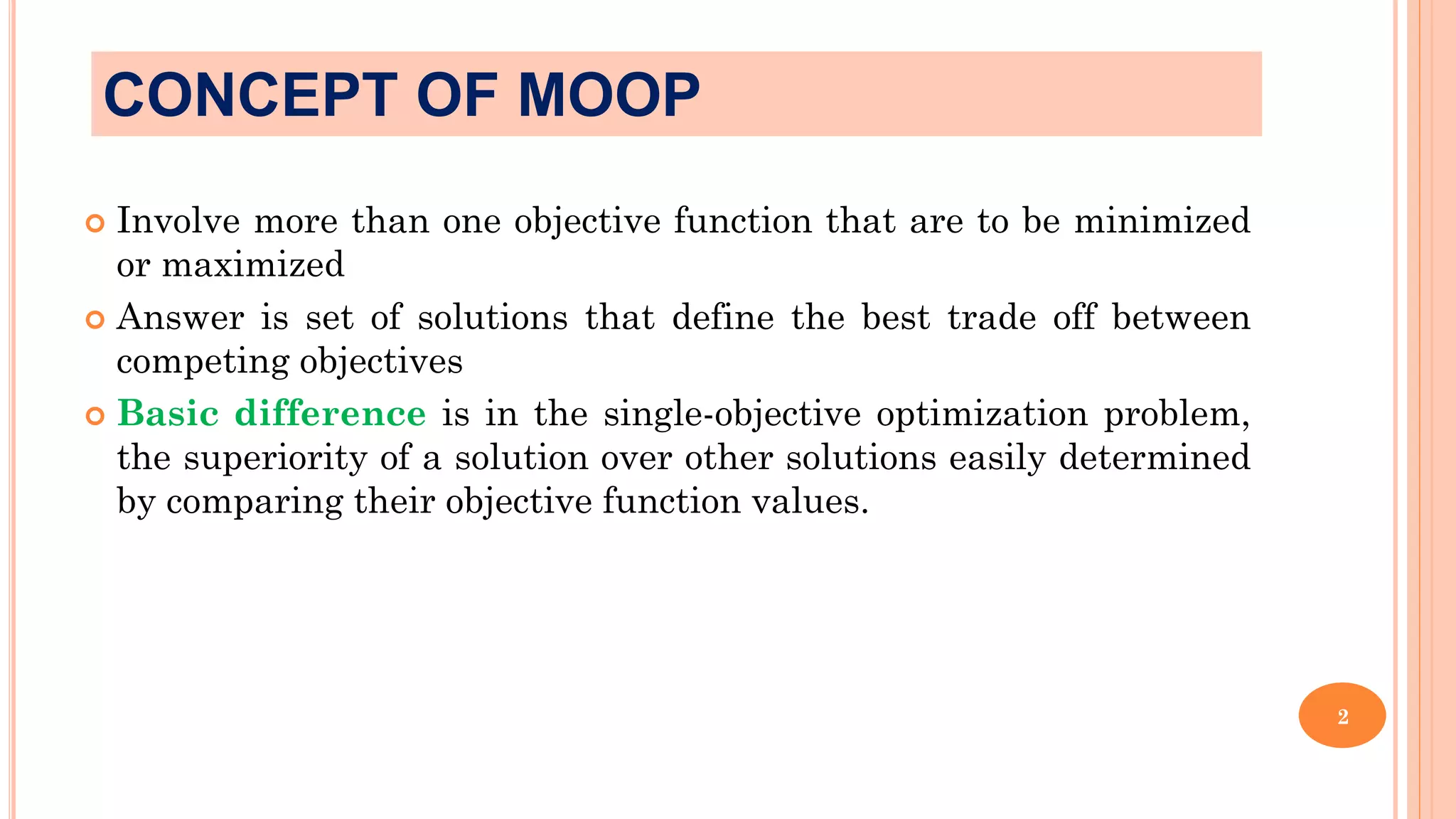



![ F(x) = [F1(x), F2(x),...,Fm(x)],
Min F(x), subject to Gi(x)=0, i=1,...,ke; Gi(x)≤0, i=ke+1,...,k; l≤x≤u.
Simple car design example: two objectives - cost and accident rate –
both of which are to be minimized.
7
MOOP MATHS
A, B, D - One objective
can only be improved at
the expense of at least
one other objective!](https://image.slidesharecdn.com/multiobjectiveoptimizationandparetomultiobjectiveoptimizationwithcasestudy-190402034906/75/Multi-Objective-Optimization-and-Pareto-Multi-Objective-Optimization-with-case-study-7-2048.jpg)











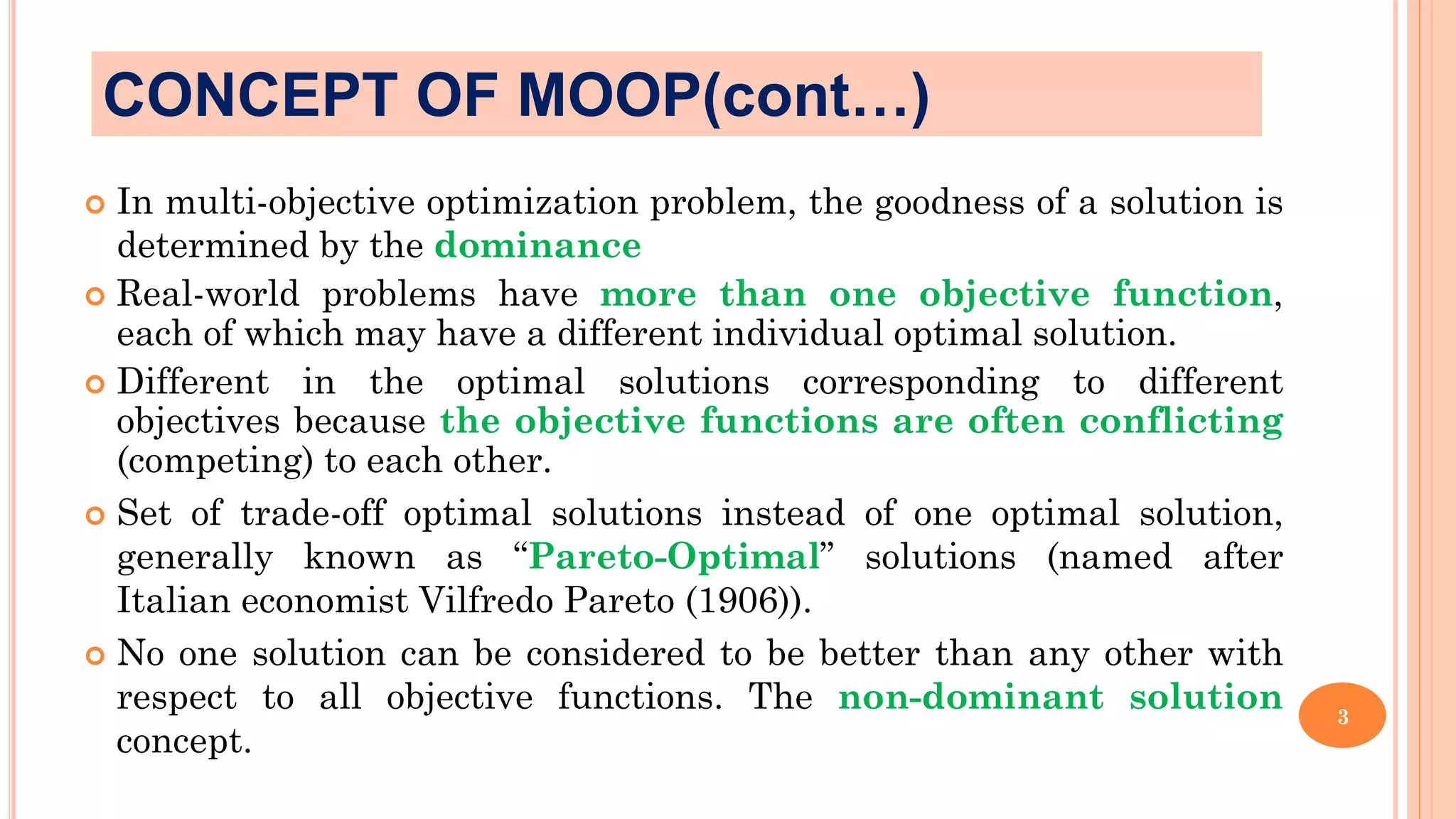
![ STEPS
1. Define Rosen brock function in editor…….. save
2. Define constraint in other editor window……..save
Here, use [ ] blank to add equality
3. Use optimization app>>>>fmincon-constrained nonlinear minimization
4. Give objective function, starting point, constraint function
START………………
FIND FINAL POINT WITH MINIMUM OB. FUNCTION
19
MOOP IN MATLAB (ROSEN BROCK FUNCTION)](https://image.slidesharecdn.com/multiobjectiveoptimizationandparetomultiobjectiveoptimizationwithcasestudy-190402034906/75/Multi-Objective-Optimization-and-Pareto-Multi-Objective-Optimization-with-case-study-19-2048.jpg)