Downloaded 107 times

![Let the cost of this path be cost(i), the cost of corresponding
Cycle would be cost(i) + dist(i, 1) where dist(i, 1) is the distance
from i to 1. Finally, we return the minimum of all [cost(i) + dist(i,
1)] values.
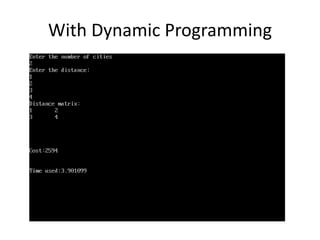
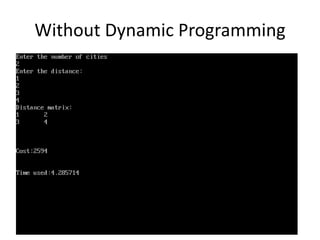
Let us define a term C(S, i) be the cost of the minimum cost
path visiting each vertex in set S exactly once, starting at 1 and
ending at i.
We start with all subsets of size 2 and calculate C(S, i) for all
subsets where S is the subset, then we calculate C(S, i) for all
subsets S of size 3 and so on. Note that 1 must be present in
every subset.](https://image.slidesharecdn.com/combinatorialoptimizationfinal-140920135113-phpapp02/85/Combinatorial-Optimization-27-320.jpg)





The document discusses various combinatorial optimization problems including the minimum spanning tree (MST), travelling salesman problem (TSP), and knapsack problem. It provides details on the MST and TSP, defining them, describing algorithms to solve them such as Kruskal's and Prim's for the MST and dynamic programming for the TSP, and discussing their applications and time complexities. The document also compares Prim and Kruskal algorithms and discusses how dynamic programming can provide an efficient solution for the TSP in some cases but not when the number of targets is too large.