Downloaded 41 times






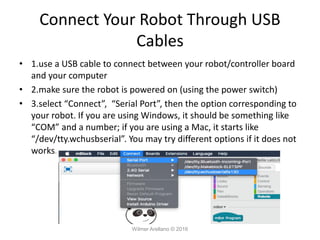
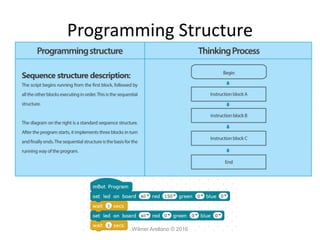

































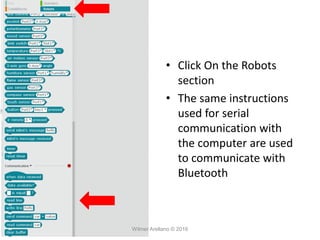
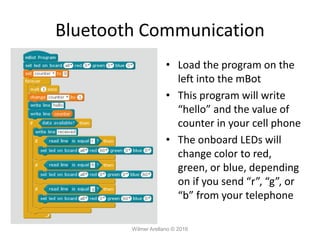




The document provides instructions for using mBlock and mBot robots. It discusses connecting mBot robots via USB, Bluetooth, or 2.4GHz wireless modules. It describes programming structures like functions that make programs easier to understand and troubleshoot. Examples are given for playing tones, remote control, and Bluetooth communication between an mBot and Android phone. Connecting sensors and actuators like ultrasonic sensors and grippers is also covered.